

나노물질

산업 제조
유연한 압전 폴리(비닐리덴 플루오라이드)(PVDF) 필름을 기반으로 16개의 마이크로 스케일 용량 유닛을 포함하는 유연한 4 × 4 센서 어레이가 시연되었습니다. PVDF의 압전 및 표면 형태는 광학 이미징 및 PFM(piezoresponse force microscopy)으로 조사되었습니다. PFM은 위상차를 보여 PVDF와 전극 사이의 명확한 인터페이스를 나타냅니다. 전기 기계적 특성은 센서가 우수한 출력 응답과 매우 높은 신호 대 잡음비를 나타냄을 보여줍니다. 출력 전압과 적용된 압력은 12mV/kPa의 기울기로 선형 관계를 갖습니다. 홀드 앤 릴리스 출력 특성은 2.5μs 미만으로 회복되어 뛰어난 전기 기계적 응답을 보여줍니다. 또한 이론적 시뮬레이션을 통해 인접 어레이 간의 신호 간섭을 조사했습니다. 결과는 0.028mV/kPa의 속도로 압력이 감소함에 따라 간섭이 감소하고 전극 크기에 따라 확장성이 뛰어나고 178kPa 미만의 압력 수준에서는 중요하지 않음을 보여줍니다.
<섹션 데이터-제목="배경">PVDF(Poly(vinylidene fluoride))는 초전, 압전 및 강유전 특성으로 인해 다양한 분야에서 많은 응용이 있는 화학적으로 안정적인 압전 고분자 재료입니다[1, 2]. 특히 PVDF 기반 압력센서는 기계적 물성(영률 2500 MPa, 파단점 강도 ~ 50 MPa)이 우수하여 유연성, 내피로 등 우수한 기계적 물성을 나타낸다[3, 4]. 강유전성 PZT 계열 재료를 기반으로 하는 일반적으로 사용되는 압력 센서와 비교할 때 PVDF 기반 압력 센서는 무독성이며 생체 적합성입니다[5, 6]. 가장 중요한 것은 PVDF 기반 센서가 복잡한 스트레인 감지에 필요한 모양으로 만들 수 있는 PVDF 필름의 높은 유연성 계수로 인해 PZT 기반 센서보다 부드럽고 강하다는 것입니다[7, 8]. 따라서 PVDF 기반 압력 센서는 의약 분야의 급속한 발전에서 압력 특성화를 위한 잠재적인 유연한 바이오 센서 중 하나로 생각된다[9, 10]. Sharma et al. PVDF 필름이 있는 스마트 카테터용 압력 센서 설계; 실시간 압력 측정을 위해 카테터에 통합될 수 있습니다[11]. Bark et al. PVDF를 기반으로 운전자 손바닥의 심장 맥파 신호를 비침습적으로 측정하는 맥파 센서 시스템을 개발했습니다. 결과는 센서 시스템이 교통 사고를 피하기 위해 운전자의 경계 상태를 감지하는 데 사용할 수 있는 심박수 변동성 분석을 위한 명확한 맥파 신호를 제공할 수 있음을 보여줍니다[12]. Lee et al. PVDF와 ZnO 나노구조로 센서를 제작하고 인공 피부의 압력과 온도 변화를 감지할 수 있다[13]. 그러나 센서는 큰 치수의 단일 지점에서만 압력을 감지합니다.
인체 압력을 감지하기 위한 패치형 바이오센서와 같은 실제 응용 분야에는 다중 지점 감지, 구조적 유연성 및 초고감도가 필요합니다[14,15,16]. 이 보고된 작업에서 압전 PVDF 필름을 기반으로 하는 4 × 4 유연한 센서 어레이가 시연되어 12mV/kPa의 초고감도와 2.5μs의 빠른 출력 응답을 보여줍니다. 사람의 손가락에 가해지는 압력의 크기와 공간 분포가 특성화됩니다.
제안된 센서 어레이는 두께가 약 50μm인 PVDF 박막 기반의 샌드위치 구조를 가지고 있습니다(Jinzhou Kexin Inc., China). 20μm 두께의 알루미늄 전극 어레이를 PVDF 필름의 양면에 덮었습니다. 그림 1a는 센서의 개략적인 설계를 보여줍니다. 센서에는 16개의 마이크로 커패시터 유닛이 있습니다. 4대마다 1개의 연결선을 공유하여 전극선의 양을 최소화합니다.
<그림>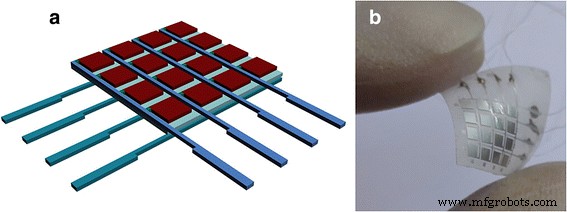
아 센서 어레이의 개략도. ㄴ 궁극적인 장치의 실제 그림
센서 어레이를 제작하기 위해 폴리디메틸실록산(PDMS)으로 덮인 슬라이드 유리를 단단한 기판으로 준비했습니다. 기판에 양면이 Al으로 덮인 PVDF 박막을 로딩하였다. 그런 다음, 포토레지스트를 40초 동안 3000rpm의 속도로 필름 표면에 스핀 코팅했습니다. 마스크 얼라이너 시스템(ABM, Inc., USA)에 의한 Al의 포토리소그래피 및 습식 식각 후, 4 × 4 정사각형 구조를 갖는 16개의 커패시터 유닛이 준비되었다. 그런 다음 PDMS 기판의 유연한 센서를 슬라이드 유리에서 집어 들었습니다. 각 커패시터의 전극은 은 접착제를 통해 전도성 와이어와 연결되었습니다. 우수한 생체 적합성을 얻기 위해 센서 상단을 PDMS로 덮어 포장하고 60°C에서 12시간 가열했습니다. 그림 1b는 구부러진 압력 센서의 사진으로 센서가 유연함을 보여줍니다.
PFM(Piezoresponse force microscopy) 연구(Seiko, Inc., Japan)는 2 ×의 스캐닝 영역 크기와 2V의 AC 바이어스 전압에서 제안된 센서의 PVDF 필름의 표면 형태와 압전 특성을 특성화하기 위해 수행되었습니다. 2μm 2 .
센서를 보정하기 위해 내쇼날인스트루먼트의 데이터 수집(DAQ-USB6008) 장비에 연결된 전기-기계 실험 플랫폼에서 제안된 센서에 다양한 압력을 가했습니다. 4개의 차동 아날로그 신호를 사용한 데이터 수집은 차동 모델로 설정되었습니다. 제안된 센서의 출력 전압 신호는 센서 어레이와 DAQ 사이의 연결을 변경하여 얻었습니다.
그림 2a는 광학 현미경으로 확인한 Al 에칭 후 센서의 표면 형태를 보여줍니다. 상당히 밝고 어두운 대비는 PVDF와 에칭된 Al 전극 사이의 명확한 경계면을 나타냅니다. 그림 2b, c는 압력 센서의 PVDF 필름의 표면 형태와 위상 신호를 보여줍니다. PVDF의 표면은 조직 구조로 매끄럽다는 것을 나타냅니다. 그림 2c의 PFM 측정 위상 이미지는 그림 2b의 표면 구조와 일치하는 압전 영역의 강한 응답을 보여줍니다. 이러한 결과는 PVDF 필름을 기반으로 준비된 센서가 우수한 압전성을 나타냄을 시사합니다.
<그림>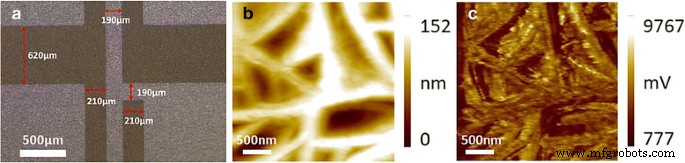
아 에칭 기술 후 제안된 센서의 표면 형태. ㄴ 표면 형태 및 c 센서의 PVDF 필름의 위상 PFM 이미지
98.1kPa의 일정한 압력이 센서의 제곱 전극 중 하나에 가해질 때 출력 신호의 일반적인 결과가 그림 3a에 나와 있습니다[17]. x -축 및 y -축은 각각 센서의 제곱 전극의 시간과 출력 전압을 나타냅니다. 출력 전압은 센서의 PVDF 필름에 의해 생성된 전하(Q)에서 변환되었습니다. 압전 방정식(여기서 d 33 분극 방향이 전기장의 방향과 같을 때 압전 상수이고 FZ 압력이 z에 적용됨을 의미합니다. - d와 같은 방향 33 ), 출력 전압과 압력 사이의 관계를 설정할 수 있습니다. 원시 데이터는 49~51Hz의 대역 블록을 적용하여 얻었습니다. 이 그림의 화살표 선은 센서에 가해지는 압력에 의해 생성된 약 123.1mV의 신호를 나타냅니다. 압력에 따른 센서의 출력 전압은 낮은 노이즈와 높은 신호 대 노이즈 비율로 신호에 명확하게 나타납니다. 센서 어레이의 동기 특성을 확인하기 위해 113.2kPa의 동일한 압력을 센서의 4개 유닛에 동시에 가했습니다. 압력에 의해 유도된 출력 전압 신호는 그림 3b에 나와 있습니다. 4개의 센서 유닛에서 동시에 약 190mV의 거의 동일한 출력 값을 얻었는데, 이는 센서 어레이가 다점 압력을 가하여 높은 안정성과 동기 특성을 나타냄을 시사합니다. 센서 어레이를 보정하기 위해 60~150kPa 범위의 다양한 압력이 센서 어레이에 적용되었습니다. 출력 전압 대 인가된 압력을 구하고 선형 관계를 나타내는 그림 3c에 표시된 교정 곡선으로 플로팅했습니다. 선형 곡선의 기울기는 약 2.9mV/kPa이고 보정 곡선에는 - 159.2mV의 오프셋이 있습니다.
<그림>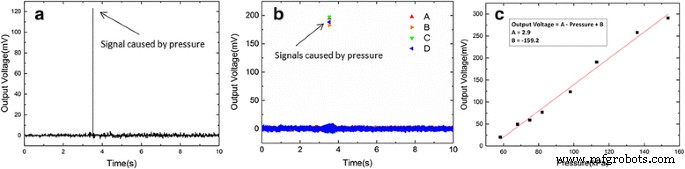
a에 대한 필터링된 출력 전압 전극 사각형 및 b 센서 어레이의 4개의 전극 사각형. ㄷ 제안된 센서의 라이너 교정 곡선 맞춤
다양한 주파수의 임펄스 압력을 적용하여 센서의 한 제곱 전극의 홀드 및 릴리스 출력 응답을 얻었습니다. 그림 4a의 플롯된 곡선은 90Hz의 주파수로 약 75.1kPa의 임펄스 압력을 적용한 센서의 일반적인 응답을 보여줍니다. 양의 출력 전압은 센서 어레이의 전극 사각형의 압축에 해당하고 음의 출력 전압은 이완에 해당합니다. 그림 4a의 삽입에서 볼 수 있듯이, 베어 압전 PVDF 필름[18]에서도 유사한 홀드 및 릴리스 출력 응답이 관찰되었습니다. 센서의 출력 전압의 응답 시간은 2ms 미만이며 이는 센서가 우수한 전기-기계적 응답 특성을 나타냄을 나타냅니다. 60~150kPa 범위의 임펄스 압력이 센서 어레이에 적용되었습니다. 홀드 앤 릴리스 출력 응답 곡선은 그림 4b에 나와 있습니다. 센서는 서로 다른 압력에서 약 2ms의 응답 시간으로 안정적인 전기-기계적 응답 특성을 나타내며 서로 다른 압력에서 센서의 출력 전압은 위에서 얻은 선형 교정 곡선과 일치합니다.
<그림>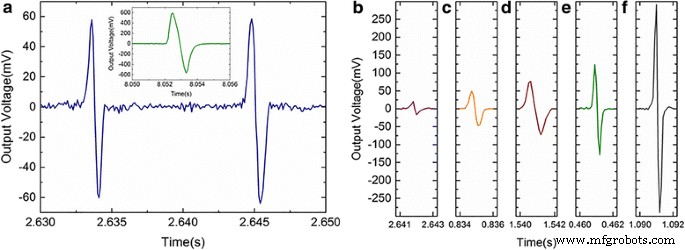
a의 압력에서 홀드 앤 릴리스 출력 응답 75.1kPa, b 58.2kPa, c 67.8kPa, d 81.9kPa, e 98.1kPa 및 f 153.6kPa 삽입된 그림은 베어 PVDF 필름에서 얻은 홀드 앤 릴리스 출력 응답을 보여줍니다.
다음으로 선택점에 대한 압력의 적용을 연구합니다. 어레이 중 하나의 전극에 압력이 가해지면 인접한 어레이 사이에 신호 간섭이 표시됩니다. 신호 간섭 시뮬레이션은 어레이에서 COMSOL Multiphysics를 통해 수행되었습니다. 각 전극 면적은 1.4mm 2 입니다. . 구조의 기하학은 그림 5a에 나와 있습니다. 전극 A에 압력이 가해질 때 추가 변형은 그림 5b에서 볼 수 있으며, 이는 전극 A에서 멀어질수록 변형이 증가함을 나타냅니다. 20~80kPa의 압력 수준에서 전위차의 간섭이 연구되었으며 그림 5c. 전위차와 압력은 기울기가 0.028mV/kPa이고 절편이 5 × 10 −4 인 선형 관계를 나타냅니다. mV, 매우 낮은 수준의 간섭을 의미합니다. 178kPa 미만의 압력은 무시할 수 있는 5mV 미만의 신호 간섭을 생성합니다[16, 17]. 또한 어레이 전극 크기에 대한 간섭의 의존성이 조사되었습니다. 그림 5d는 전극 크기가 1.2, 1.0, 0.8mm인 결과를 보여줍니다. 2 . 가장 작은 전극에서도 간섭 전위차와 압력(20~60kPa 범위) 사이의 선형 관계가 여전히 관찰될 수 있음을 보여줍니다. 인터페이스 전압에 대한 피팅 기울기는 각각 0.01748, 0.01181, 0.00574mV/kPa이며, 작은 전극 크기에서 감소된 간섭 전위가 관찰된 세 가지 구조입니다.
<사진>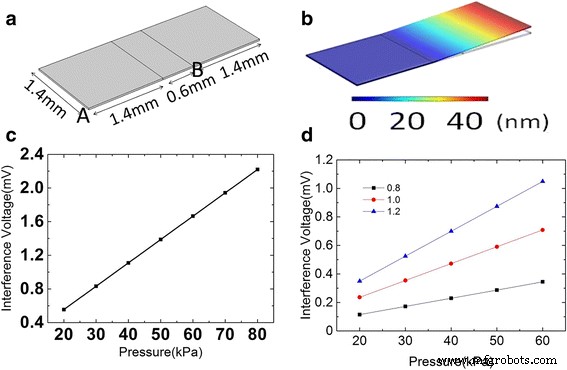
아 이론적 시뮬레이션에 사용되는 물리적 치수입니다. ㄴ 변위 및 c 1.4mm의 어레이 크기로 간섭 전압과 적용된 압력 사이의 라이너 곡선 맞춤. d 각각 0.8, 1.0, 1.2mm의 어레이 크기를 사용하여 얻은 결과
간단한 실용화를 위해 센서를 적용하여 사람 손의 압력 상태와 손가락의 분포를 측정하였다. 우리 모두가 알고 있듯이 복잡한 손가락 움직임은 지압, 주무르기, 문지르기, 마찰 등과 같은 몇 가지 기본 기술로 구성됩니다[19]. 우리의 실험에서는 지압, 주무르기, 문지름을 포함하여 가장 일반적으로 사용되는 세 가지 동작을 선택하여 손가락의 압력 상태와 분포를 테스트했습니다. 그림 6은 각각 손가락이 세 번 움직일 때 센서에 의해 특징지어지는 엄지손가락의 압력 분포 스냅을 보여줍니다. 그림 6a에서 지압 동작 시 76kPa의 압력이 엄지손가락 중앙에 집중된 것을 분명히 알 수 있었는데, 이는 각각 그림 6b, c에서 볼 수 있는 주무름과 문지름과 상당히 다른 것입니다. 그림 6b는 주무르기 동작 중에 엄지손가락 앞쪽의 압력이 손가락의 다른 부분보다 높은 반면, 엄지손가락의 압력은 그림 6과 같이 문지름 동작 동안 상당히 균일함(약 68kPa)을 보여줍니다. 6c. 손가락에서 관찰된 압력 분포는 임상 관찰에서 이전 보고서[17, 20]와 다소 유사합니다. 우리의 측정에 따르면 유연한 강유전성 PVDF 필름을 기반으로 하는 스트레인 센서는 복잡한 손가락 움직임을 특성화하는 데 민감한 것으로 판명되었습니다. 제안된 센서를 이용하여 인간의 손가락의 기능을 보다 정밀하게 탐색할 수 있을 것으로 기대되며, 향후 인간의 손가락을 대체할 로봇의 개발에도 도움이 될 것으로 기대된다.
<그림>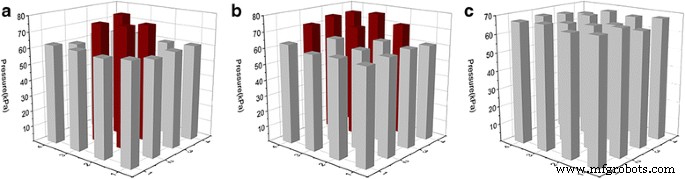
제안된 센서가 특징짓는 엄지손가락 움직임의 압력 상태와 분포:a 지압, b 반죽 및 c 문지르다
결론적으로, 압전 PVDF 박막을 기반으로 하는 16개의 커패시터 유닛을 포함하는 4 × 4 센서 어레이가 제작되고 PDMS로 패키징되었다. 센서 어레이는 유연하고 고감도 특성을 나타냅니다. 센서의 유지 및 해제 출력 응답은 다양한 주파수의 임펄스 압력을 적용하여 얻었으며, 이는 60~150kPa 범위의 압력을 적용할 때 센서 어레이가 2ms 이내에 20~300mV 전압 신호를 생성할 수 있음을 나타냅니다. 제안된 센서를 사용하여 사람의 손이 손가락을 움직일 때 손가락에서 분명히 다른 압력 분포를 관찰하였으며, 이는 사람의 손가락의 기술을 보다 정확하게 탐구할 것으로 기대됩니다.
압전응력 현미경
폴리(비닐리덴 플루오라이드)
나노물질
초록 유연한 압력 센서는 웨어러블 인체 건강 모니터링 및 관리 시스템에서의 잠재적인 응용으로 인해 점점 더 많은 관심을 받고 있습니다. 여기에서 우리는 Ag 나노와이어 코팅 직물이 통합된 모든 섬유 기반 압저항 압력 센서를 제작하기 위한 손쉬운 접근 방식을 제시합니다. 섬유/사/직물 다중 레벨 접점의 시너지 효과를 최대한 활용하여 3.24 × 105의 초고감도를 구현합니다. kPa−1 0–10 kPa 및 2.16 × 104에서 kPa−1 1000 로딩/언로딩 주기)을 달성했습니다. 따라서 이러한 고성능의 전섬유 압력센서는 스마트
초록 이 문서에서는 새로운 유형의 MoS2를 보고합니다. -정밀도 한계가 ~ 1‰인 평면 내 이축 스트레인 게이지용 격자 센서 기반. MoS2 격자는 최대 5%의 서로 다른 이축 변형으로 수치 시뮬레이션됩니다. 우리의 첫 번째 원칙 계산은 MoS2의 변형 감도가 반사 스펙트럼은 격자 구조와 통합되어 평면 내 이축 변형의 매핑을 가능하게 하는 추가 변형 센서로 간주될 수 있습니다. 프로토타입 MoS2에 대한 실험적 연구 -격자 센서는 격자 주기에 수직인 변형 성분이 격자의 1차 회절 패턴에서 강도 피크 이동을 유발할 수 있음을 추가