

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
 |
|
빛의 세기를 자동으로 감지하여 검은색 음영을 닫거나 여는 선글라스입니다.
그러니 이제부터는 눈에 대한 걱정은 하지 않으셔도 됩니다. 대신 이 안경은 자동으로 눈을 보호하고 어두운 곳에서도 쉽게 볼 수 있도록 그늘을 열어줍니다.
이 로봇은 Arduino와 몇 가지 기본 부품을 사용하여 만들어졌습니다. 멋지지 않나요?
업데이트:이 로봇은 HackSpace Magazine의 최고 프로젝트로 선정되었습니다. https://hackspace.raspberrypi.org/issues/9
1단계:부품


 <울>
<울> 프로그래밍을 위해서는 USB to TTl 변환기 또는 Arduino Uno가 필요합니다. Uno를 사용하여 코드를 업로드하겠습니다.
2단계:원칙
전압 분배기 회로를 만들어 아두이노와 연결해 보겠습니다. 이제 우리는 LDR이 가변 저항이며 그 저항 값이 빛의 세기에 따라 변한다는 것을 압니다. 저항이 10k이므로 값은 0에서 1023 사이입니다. 밝거나 중간 정도의 태양광이 있는 경우 값은 100보다 작습니다. 실내 조명에서 값은 약 500에서 600입니다. 너무 어둡게, 금액은 1023이 됩니다. 알겠죠? 진행합시다!
3단계:서킷
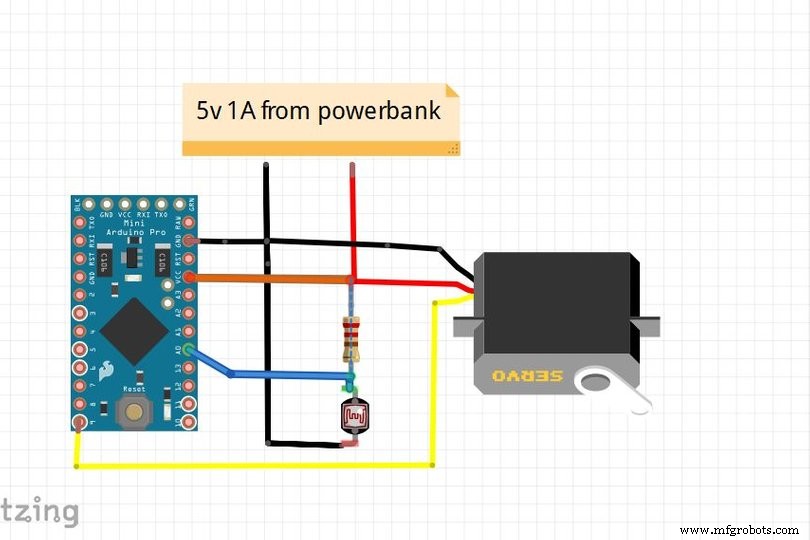


회로는 구축하기에 충분히 간단합니다. 브레드보드에서 테스트한 다음 Arduino Pro Mini에 납땜했습니다. 빛을 감지해야 하므로 LDR을 위한 공간을 만드십시오.
4단계:Arduino Pro Mini 프로그래밍
보시다시피 Pro Mini에는 USB 프로그래밍 옵션이 없습니다. USB to TTL 변환기를 사용하거나 Arduino Uno를 사용하십시오. 결국, 우리 모두는 Uno를 가지고 있지 않습니까? 왜 돈을 낭비합니까?
드라이버를 사용하여 Arduino Uno에서 ATmega328P IC를 제거하기만 하면 됩니다. 그런 다음 다음과 같이 핀을 연결합니다.
<울>동영상을 시청할 수 있습니다(언어 다름):
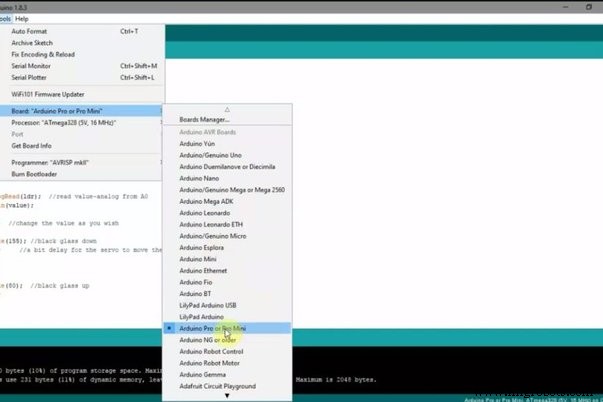
그게 다야! 그런 다음 Arduino Uno USB 케이블을 연결하고 PC 또는 Android에 연결하여 코드를 업로드합니다. 업로드하기 전에 도구>보드 유형> Arduino Pro Mini를 선택하십시오(이 경우에는 올바른 프로세서 5V 16MHz도 선택하십시오). 사진을 참조하십시오.
그런 다음 코드를 업로드하세요.
코드 링크:https://github.com/ashraf-minhaj/SunGlass-Bot-Auto...
//*SunGlass-Bot ashraf minhaj의 자동 선글라스.//youtube의 전체 자습서:www.youtube.com/c/fusebatti//필요한 경우 문의 ashraf_minhaj@yahoo.com#include서보 유리; //서보 이름int ldr=0; // LDR을 A0int에 연결 값=0; //값 정의 0void setup() { Serial.begin(9600); //필수는 아니지만 pc에 값을 표시하기 위해 sglass.attach(9); //서보에 연결할 핀을 선언}void loop(){ value =analogRead(ldr); //A0에서 값-아날로그 읽기 Serial.println(value); 지연(100); if(value<100) // 원하는 대로 값을 변경합니다. { sglass.write(155); //검은 유리 다운 지연(100); //서보가 그곳으로 이동하기 위한 약간의 지연 } else { sglass.write(80); //검은 유리 위로 지연(100); }} 그것을 업로드하고 그것이 어떻게 작동하는지보십시오!
5단계:선글라스 준비




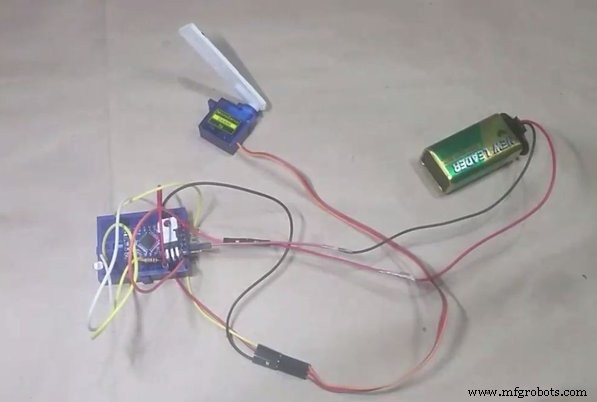
검은색 안경을 세게 밀어 빼낸 후 이렇게 단단한 철사에 붙입니다. 그런 다음 서보를 장착하고 서보 암을 추가하여 우리가 만든 추가 유리 프레임으로 붙입니다. 5V 1A 전원을 사용하여 전원을 켤 수 있습니다. 집에서 만든 보조배터리를 사용하겠습니다.
6단계:완료되었습니다!


회로의 전원을 켜면 Arduino가 켜진 것을 볼 수 있습니다. 이제 나가서 이 이상해 보이지만 놀라운 선글라스 로봇과 함께 즐거운 시간을 보내세요!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
//*SunGlass-Bot ashraf minhaj의 자동 선글라스 유리잔; //서보 이름int ldr=0; // LDR을 A0int에 연결 값=0; //값 정의 0void setup() { Serial.begin(9600); //필수는 아니지만 pc에 값을 표시하기 위해 sglass.attach(9); //서보에 연결할 핀을 선언}void loop(){ value =analogRead(ldr); //A0에서 값-아날로그 읽기 Serial.println(value); 지연(100); if(value<100) // 원하는 대로 값을 변경합니다. { sglass.write(155); //검은 유리 다운 지연(100); //서보가 그곳으로 이동하기 위한 약간의 지연 } else { sglass.write(80); //검은 유리 위로 지연(100); }} 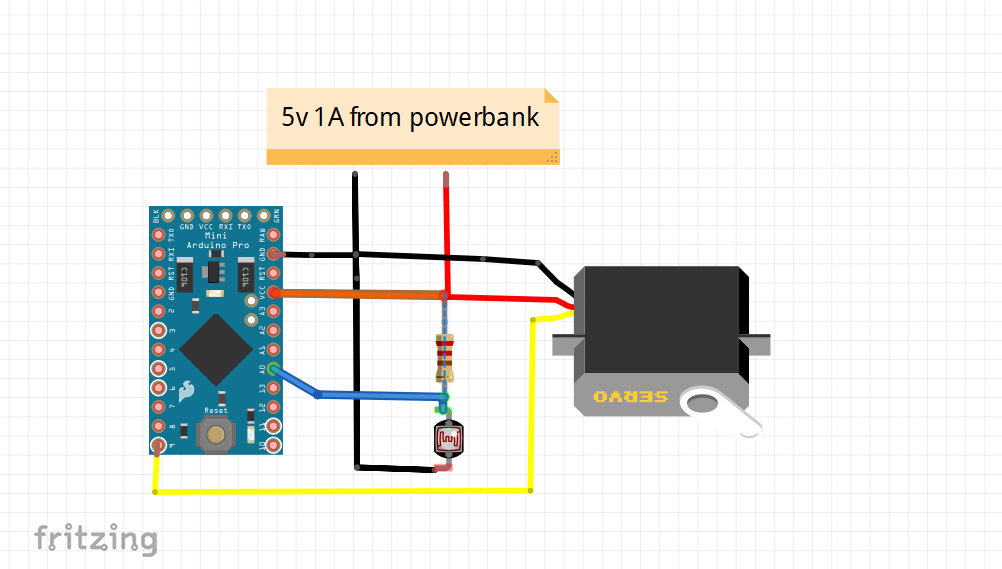
제조공정
구성품 및 소모품 Arduino UNO × 1 SparkFun ToF 거리 측정기 센서 - VL6180 장거리용 VL53L0X 및 단거리용 VL6180X. 여기서는 VL6180X를 사용했습니다. × 1 서보 모터 × 1 앱 및 온라인 서비스 Arduino IDE 처리 이 프로젝트 정보 LiDAR에 대한 몇 가지 정보 LIDAR(Light Detection and Ranging)는 빛을 비춰 표적의 거리를
구성품 및 소모품 Arduino UNO 어떤 종류의 Uno도 가능합니다. 저는 Geekcreit Uno가 잘 작동합니다. × 1 브레드보드(일반) × 1 점퍼 와이어(일반) 남성/남성 필수 × 1 LED(일반) 빨간색, 녹색 및 파란색 조명이 필요합니다. × 3 Arduino USB 2.0 데이터 케이블 × 1 저항 100옴 브라운, 블랙, 브라운 × 1 앱 및 온라인 서비스 Arduino IDE