

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
| |
| × | 1 |
 |
| |||
 |
|
잠시 시간을 보내기 위해 아두이노를 가지고 놀다가, 실패 횟수를 세고 10번 맞으면 미쳐버리는 옛날 버즈 와이어 게임의 향상된 버전을 만들기로 결정했습니다!
다음은 내 게임을 빠는 동영상입니다.
소스코드는 3개의 파일로 나누어져 있습니다.
코드에서 각 실패 후 500ms의 "유예 기간"이 설정됩니다. 각 버즈 후에 플레이어에게 더 큰 휴식 시간을 주기 위해 수정할 수 있습니다.
그리고 마지막에 느낀 점은 LED가 너무 밝다는 것! 그것에 사용된 두 개의 저항기를 더 강한 것으로 자유롭게 교체하십시오. 내 것은 약 100ohms입니다.
반지는 열쇠고리 끝부분을 사용했습니다. 그것의 좋은 점은 당신이 그것을 열 수 있고 전선을 끝까지 탐색할 필요가 없다는 것입니다.
제 프로젝트를 즐기시기 바랍니다!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">int 래치핀 =3; // 74HC595int의 ST_CP [RCK] clockPin =4; // 74HC595int의 SH_CP [SCK] dataPin =2; // DS [S1] on 74HC595const int STOP_LED =6;const int GO_LED =7;const int BUZZ =8;const int TOUCH =10;const int fail_threshold =9;enum Status{ STOP =0, GO =1};void setup() { Serial.begin(9600); 디스플레이 초기 설정(); gameInitialSetup();}상태 상태 =GO;int failCounter =0;void loop() { while (failCounter> fail_threshold) { gameover(); } 스위치(상태) { 경우 GO:digitalWrite(GO_LED, HIGH); 디지털 쓰기(STOP_LED, LOW); 디지털 쓰기(BUZZ, LOW); if (digitalRead(TOUCH) ==HIGH) { 상태 =STOP; } 부서지다; 경우 STOP:digitalWrite(GO_LED, LOW); 실패 카운터++; if (failCounter> fail_threshold) break; displayDigit(실패 카운터); Serial.println(실패 카운터); 실패 경보(); 상태 =GO; 부서지다; }}byte seg_spin[6] ={ B10000000, B01000000, B00100000, B00010000, B00001000, B00000100};void gameover(){ for (int i=0; i<6; iGH+) 지연(5); 디지털 쓰기(BUZZ, LOW); 지연(50); digitalWrite(latchPin, LOW); shiftOut(dataPin, clockPin, LSBFIRST, seg_spin[i]); digitalWrite(래치핀, 높음); 지연(10); }} byte seg_digits[10] ={ B11111100, // =0 B01100000, // =1 B11011010, // =2 B11110010, // =3 B01100110, // =4 B10110110, // =4 B10110510, =6 B11100000, // =7 B11111110, // =8 B11100110 // =9}; 무효 displayDigit(int x){ digitalWrite(latchPin, LOW); shiftOut(dataPin, clockPin, LSBFIRST, seg_digits[x]); digitalWrite(latchPin, HIGH);} 무효 displayInitialSetup(){ pinMode(latchPin, OUTPUT); 핀모드(데이터핀, 출력); 핀모드(시계핀, 출력); displayDigit(0);} 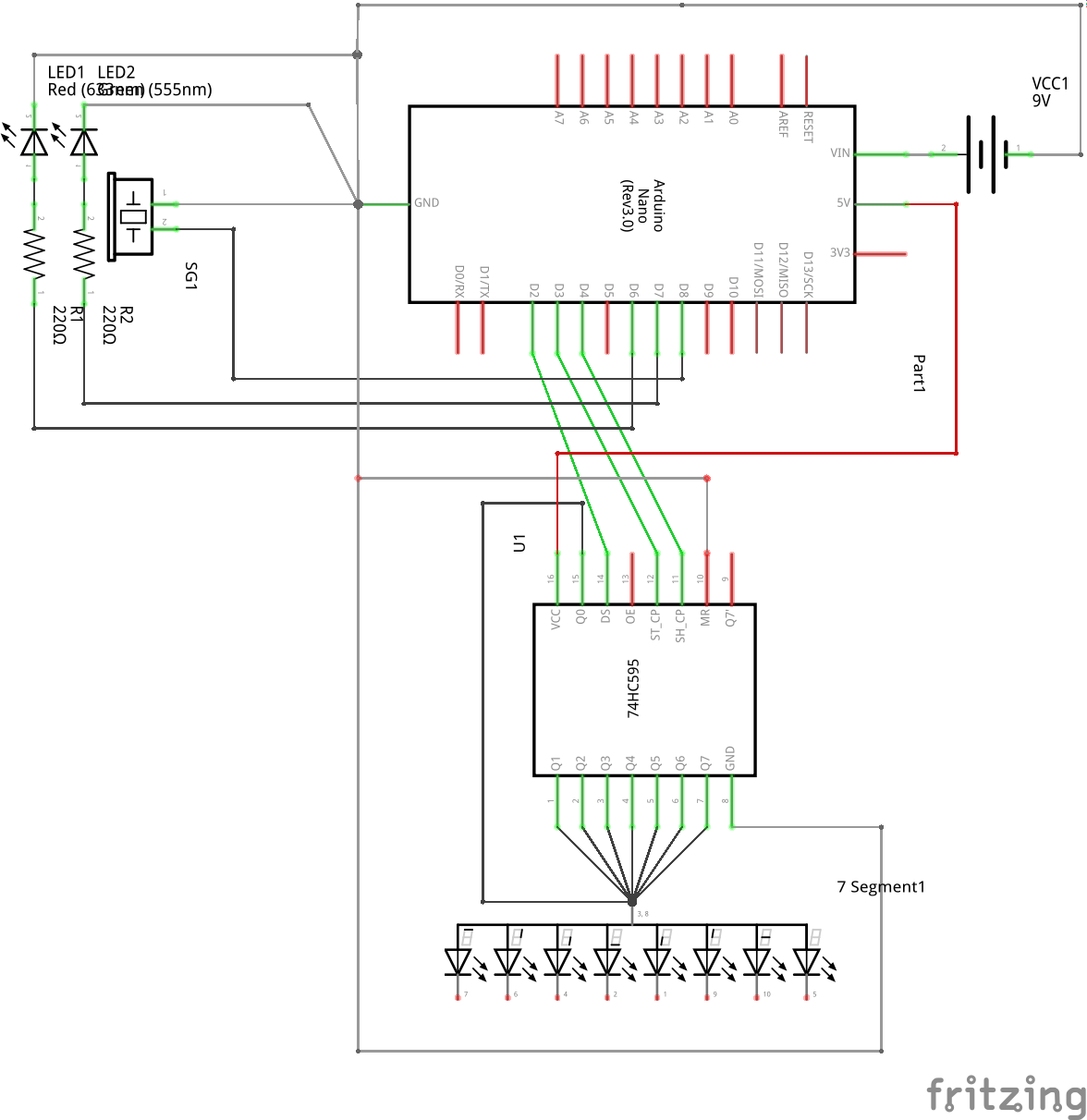
제조공정
구성품 및 소모품 Arduino Nano R3 × 1 LED 매트릭스 × 1 포토 저항기 × 1 브레드보드(일반) × 1 DS3231 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 몇 미터 떨어진 방의 시계 디스플레이를 읽으려면 이러한 LED 매트릭스 디스플레이가 필요합니다. 좋은 가격에 4셀 디스플레이를 구입한 후 Hackster에서 사용 가능한 프로젝트를
이 Arduino Tutorial에서는 RGB LED가 무엇이며 Arduino 보드와 함께 사용하는 방법을 배웁니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. RGB LED란 무엇입니까? RGB LED는 빨강, 초록, 파랑의 3가지 기본 색상을 혼합하여 다양한 색상을 낼 수 있습니다. 따라서 실제로 단일 케이스에 포장된 빨간색, 녹색 및 파란색 3개의 개별 LED로 구성됩니다. 이것이 4개의 리드가 있는 이유입니다. 3가지 색상 각각에 대해 하나의 리드가 있고 RGB LED 유형에 따라 하나의 공통 캐소