

감지기

산업 제조
가속도계는 다양한 응용 분야에서 사용됩니다. 예를 들어, 자동차 애플리케이션에서 가속도계는 에어백 시스템을 활성화하는 데 사용됩니다. 카메라는 사진의 능동적인 안정화를 위해 가속도계를 사용합니다. 컴퓨터 하드 드라이브는 또한 가속도계에 의존하여 장치의 읽기/쓰기 헤드를 손상시킬 수 있는 외부 충격을 감지합니다. 이 경우 가속도계는 외부 충격이 발생하면 드라이브 작동을 일시 중지합니다. 이것은 몇 가지 가속도계 응용 프로그램에 불과합니다.
이러한 장치를 사용할 수 있는 가능성은 실제로 무궁무진합니다. 미세 가공 기술의 엄청난 발전으로 오늘날의 작고 저렴한 미세 가공 가속도계가 가능해졌습니다. 사실, 작은 크기와 저렴한 비용은 이러한 장치를 광범위한 응용 분야에 적용할 수 있게 해주는 두 가지 주요 요소입니다.
이 기사에서는 가속도 측정의 물리학을 살펴보겠습니다. 우리는 질량-스프링-댐퍼(또는 질량-감쇠-스프링이라고도 함) 구조가 가속도를 변위량으로 변환할 수 있는 방법과 이 변위를 적용된 가속.
그림 1과 같은 질량-스프링-댐퍼 구조를 사용하여 가속도를 측정할 수 있습니다.
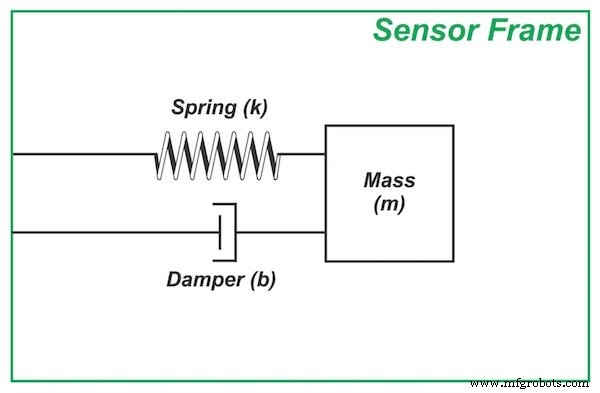
일반적으로 검증 질량(또는 테스트 질량)이라고 하는 알려진 질량의 질량은 스프링을 통해 센서 프레임에 연결됩니다.
댐퍼는 이 시스템의 핵심 구성요소이지만 EE에게는 다소 생소할 수 있고 댐퍼의 기본 개념을 소개하는 데 몇 단락이 필요할 수 있으므로 이 시리즈의 다음 기사까지 보류하겠습니다.
그림 1의 구조가 가속도를 감지하는 방법을 살펴보겠습니다.
센서 프레임이 외력으로 인해 가속되면 프루프 매스는 관성으로 인해 "뒤집어지는" 경향이 있습니다. 그러면 아래 그림과 같이 센서 프레임에 대한 프루프 매스의 상대적 위치가 변경됩니다.
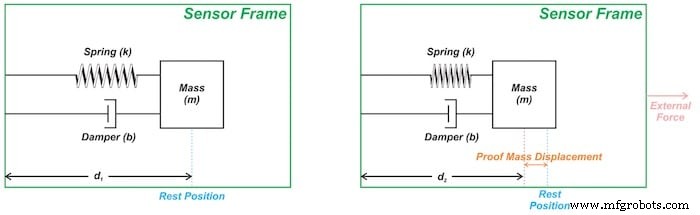
그림 2(a)는 외력이 없을 때 정지 위치에 있는 Proof Mass를 보여줍니다. 프레임에 외력이 가해지면 그림 2(b)와 같이 프레임이 오른쪽으로 가속됩니다. Proof Mass는 처음에 정지 상태로 유지되는 경향이 있어 프레임에 대한 Proof Mass의 상대적 위치가 변경됩니다(d2
센서의 비관성(즉, 가속) 프레임에 있는 관찰자는 검증 질량이 정지 위치의 왼쪽으로 변위되는 것을 관찰합니다. Proof Mass 변위로 인해 스프링이 압축되고 Proof Mass의 변위에 비례하는 힘을 가합니다. 스프링이 가하는 힘은 프루프 매스를 오른쪽으로 밀어 외부 힘의 방향으로 가속시킵니다.
시스템의 다른 매개변수에 대해 적절한 값이 선택되면 증명 질량 변위는 프레임 가속도 값에 비례합니다(시스템의 과도 응답이 사라진 후).
요약하자면, 질량-스프링-댐퍼 구조는 센서 프레임의 가속도를 증명 질량 변위로 변환합니다. 나머지 질문은 이 변위를 어떻게 측정할 수 있습니까?
증거 질량 변위는 여러 방법으로 측정할 수 있습니다. 한 가지 일반적인 방법은 그림 3에 묘사된 정전용량 감지 방식입니다.
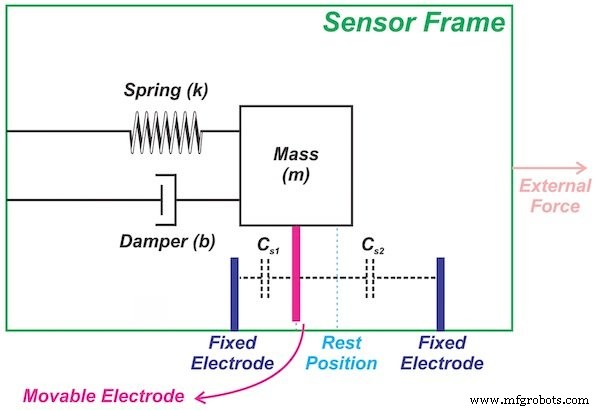
프루프 매스에 연결된 이동 가능한 전극과 함께 센서 프레임에 고정된 두 개의 전극이 있습니다. 이렇게 하면 두 개의 커패시터 Cs1가 생성됩니다. 및 Cs2 , 그림 3과 같이
프루프 매스가 한 방향으로 이동함에 따라 가동 전극과 고정 전극 중 하나 사이의 커패시턴스는 증가하고 다른 커패시터의 커패시턴스는 감소합니다. 이것이 우리가 입력 가속도에 비례하는 증거 질량 변위를 감지하기 위해 감지 커패시터의 변화만 측정하면 되는 이유입니다.
감지 커패시터의 변화를 정확하게 측정하기 위해 동기 복조 기술을 적용할 수 있습니다. 그림 4는 Analog Devices의 ADXL 가속도계 제품군에 사용된 신호 컨디셔닝의 단순화된 버전을 보여줍니다.
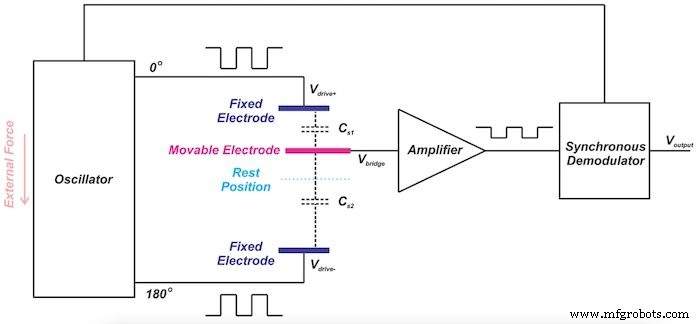
이 경우 감지 커패시터 Cs1의 AC 여기로 1MHz 구형파가 사용됩니다. 및 Cs2 . 고정 전극에 적용된 구형파는 진폭은 동일하지만 서로에 대해 180° 위상이 다릅니다. 가동 전극이 정지 위치에 있을 때 증폭기 입력의 전압은 0볼트입니다.
가동 전극이 고정 전극 중 하나에 더 가까이 이동하면 해당 전극의 여기 전압의 더 큰 부분이 증폭기 입력 V브리지에 나타납니다. , 이는 증폭기 입력에 나타나는 구형파가 더 가까운 전극의 여기 전압과 동상임을 의미합니다.
예를 들어, 그림 4에서 증폭된 출력은 Vdrive+와 위상이 같은 구형파입니다. 왜냐하면 Cs1 Cs2보다 큽니다. .
V브리지의 진폭 증명 질량 변위의 함수입니다. 그러나 Vbridge의 위상 관계도 알아야 합니다. Vdrive+ 관련 및 V드라이브- Proof Mass가 변위되는 방향을 결정하기 위해.
동기식 복조기는 기본적으로 증폭기 출력을 여기 전압(Vdrive+ 또는 V드라이브- ) 증폭기 출력의 구형파를 변위량과 방향을 나타내는 DC 전압으로 변환합니다.
동기식 복조가 이를 달성하는 방법을 알아보려면 LVDT 복조 기술에 대한 제 기사인 LVDT 복조:정류기 유형 대 동기 복조를 참조하십시오.
그림 3에 표시된 정전 용량 감지에는 차동 특성이 있습니다. Cs1 증가, Cs2 감소하고 그 반대도 마찬가지입니다.
고정 전극 중 하나가 생략되어 가변 커패시터가 하나만 있는 단일 종단 용량 감지를 사용하는 것도 가능합니다. 이 경우 그림 5와 같이 시스템을 모델링할 수 있습니다.
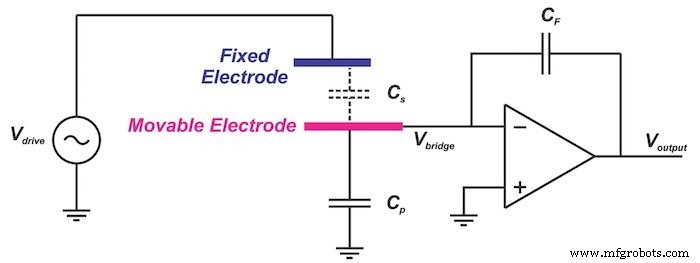
이 단일 종료 버전은 더 간단한 솔루션인 것 같습니다. 그렇다면 단일 감지 커패시터를 사용하지 않는 이유는 무엇입니까?
이 회로를 더 자세히 살펴보겠습니다.
위 그림에서 Cp 가동 전극에서 접지까지의 총 기생 커패시턴스를 모델링합니다. 이상적으로는 V브리지 가상 그라운드에 있으며 Cp를 무시할 수 있습니다. 한쪽에는 접지가 있고 다른 한쪽에는 가상 접지가 있기 때문입니다.
따라서 출력은 다음과 같이 간단히 얻을 수 있습니다.
\[ V_{출력} =-\frac{C_s}{C_F} V_{드라이브}\]
바이어스 전류 경로는 그림 5에 표시되어 있지 않습니다. 커패시터 기본 방정식을 사용하여 증명 질량 변위로 출력을 표현할 수 있습니다.
커패시터 C의 경우:
\[ C =\epsilon \frac{A}{d}\]
여기서 ε은 유전율, A는 평행판 면적, d는 두 전도성 판 사이의 거리입니다. 단순화를 위해 두 개의 커패시터 Cs 및 CF ε과 A가 동일합니다.
방정식 1은 다음과 같이 단순화될 수 있습니다.
\[ V_{출력} =-\frac{d_F}{d_s} V_{드라이브}\]
여기서 dF 및 ds CF의 전극 사이의 거리를 나타냅니다. 및 Cs , 각각. ds 초기 거리 d0의 합으로 표현할 수 있습니다. 및 변위 값 Δd.
여기에서 다음을 얻을 수 있습니다.
\[ V_{출력} =-\frac{d_F}{d_0 + \Delta d} V_{드라이브}\]
보시다시피 변위 항(Δd)은 출력 방정식의 분모에 있습니다. 따라서 출력은 증명 질량 변위 Δd의 비선형 함수입니다.
그림 4에 표시된 차동 정전용량 감지의 전달 함수를 살펴보겠습니다.
차동 정전 용량 감지를 통해 V브리지 는 다음과 같이 제공됩니다.
\[ V_{브리지} =\frac{C_{s1} V_{드라이브+} + C_{s2} V_{드라이브-}}{C_{s1} + C_{s2 }} \]
방정식 2를 적용하고 두 개의 커패시터 Cs1 및 Cs2 동일한 ε 및 A 값을 가지면 다음을 얻습니다.
\[ V_{브리지} =\frac{d_{s2} V_{드라이브+} + s_{s1} V_{드라이브-}}{d_{s1} + d_{s2 }} \]
여기서 ds1 및 ds2 Cs1의 전극 사이의 거리를 나타냅니다. 및 Cs2 , 각각. ds1일 때 증가, ds2 같은 양만큼 감소하고 그 반대도 마찬가지입니다.
가정:
\[ d_{s1} =d_0 - \델타 d \]
\[ d_{s2} =d_0 + \델타 d \]
\[ V_{드라이브+} =- V_{드라이브-} \]
방정식 3은 다음과 같이 단순화됩니다.
\[ V_{브리지} =\frac{\Delta d}{d_0} V_{드라이브+} \]
보시다시피, 차동 구조에서 출력 전압은 증명 질량 변위 Δd의 선형 함수입니다. 소프트웨어를 사용하여 센서 선형성 오류를 제거할 수 있지만 선형 응답을 갖는 것이 측정 정밀도를 높이고 시스템 보정을 용이하게 하므로 바람직합니다.
우리는 질량-스프링-댐퍼 구조가 가속도를 변위량으로 변환할 수 있는 방법과 이 변위를 적용된 가속도에 비례하는 전기 신호로 변환하기 위해 정전용량 감지 접근 방식을 적용할 수 있는 방법을 보았습니다.
우리는 또한 적용된 가속도에 비례하는 증거 질량 변위를 위해 질량-스프링-댐퍼 시스템의 다른 매개변수가 적절하게 선택되어야 한다고 간략하게 언급했습니다.
다음 기사에서는 시스템 작동에 대한 더 깊은 통찰력을 얻기 위해 질량-스프링-댐퍼 시스템의 전달 함수를 유도할 것입니다.
내 기사의 전체 목록을 보려면 이 페이지를 방문하십시오.
감지기
Fanuc G21 밀리미터 측정 또는 밀리미터 프로그래밍 . CNC는 미터법으로 프로그래밍할 수 있는 유연성을 제공합니다. 또는 인치 체계 . 화낙 G21 G 코드는 CNC를 미터법으로 변경합니다. 그래서 여기 초보 수준의 cnc 프로그래머를 위한 또 다른 cnc 프로그래밍 예제가 있습니다. . 이 cnc 프로그래밍 예제는 Fanuc G21 G 코드를 사용합니다. . Fanuc G21 프로그래밍 예 N1 T0505N2 G92 S1500 M03N3 G21 G96 S150N4 G00 X0 Z5N5 G42 G01 Z0 G95 F
Fanuc G20 인치 측정 또는 인치 프로그래밍 . CNC 기계를 사용하면 모든 유형의 구성 요소를 프로그래밍하고 기계 가공할 수 있습니다. 같은 방식으로 cnc 기계 제어는 미터법뿐만 아니라 프로그래밍할 수 있는 최고의 유연성을 제공합니다. 인치 체계에서도 마찬가지입니다. . Fanuc cnc 제어 G20에서 및 G21 인치와 미터법 사이를 변경하는 데 사용됩니다. 이 cnc 프로그래밍 예제는 Fanuc G20 G 코드의 사용법을 보여줍니다. Fanuc G20 프로그램 예시 Fanuc G20 CNC 프로그램 예 N1 T