

산업기술

산업 제조
연산 증폭기의 출력을 반전 입력에 연결하고 전압 신호를 비반전 입력에 적용하면 연산 증폭기의 출력 전압이 입력 전압을 밀접하게 따른다는 것을 알 수 있습니다. 단순성을 위해 전원, +V/-V 전선 및 접지 기호):
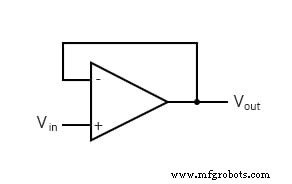
Vin으로 증가, Vout 차동 이득에 따라 증가합니다. 그러나 Vout으로 증가하면 출력 전압이 반전 입력으로 피드백되어 입력 간의 전압 차를 줄이는 역할을 하고 출력을 낮추는 역할을 합니다. 주어진 전압 입력에 대해 발생하는 일은 연산 증폭기가 Vin과 거의 동일한 전압을 출력한다는 것입니다. , 그러나 Vin 사이에 충분한 전압 차이가 남도록 충분히 낮습니다. 및 (-) 입력을 증폭하여 출력 전압을 생성합니다.
회로는 안정점(평형 으로 알려짐)에 빠르게 도달합니다. 물리학에서), 출력 전압은 적절한 양의 차동을 유지하기 위한 적절한 양입니다. 연산 증폭기의 출력 전압을 가져와 반전 입력에 연결하는 것을 음의 피드백이라고 하는 기술입니다. , 그리고 이것은 자가 안정화 시스템을 갖는 열쇠입니다(이것은 연산 증폭기뿐만 아니라 일반적으로 모든 동적 시스템에 해당됨). 이러한 안정성 덕분에 연산 증폭기는 피드백이 전혀 없이 비교기로 사용될 때처럼 단순히 "켜짐" 또는 "꺼짐"으로 완전히 포화되는 것과 달리 선형(활성) 모드에서 작동할 수 있습니다.
연산 증폭기의 이득이 너무 높기 때문에 반전 입력의 전압을 Vin과 거의 동일하게 유지할 수 있습니다. . 출력 전압을 입력 전압 및 이득과 관련된 방정식을 작성할 수 있습니다. G :
$$V_{out} =G · (V_{in} - V_{out})$$
그런 다음 출력 전압을 풀면 다음을 얻습니다.
$$V_{out} =\frac{V_{in}}{1 + (\frac{1}{G})}$$
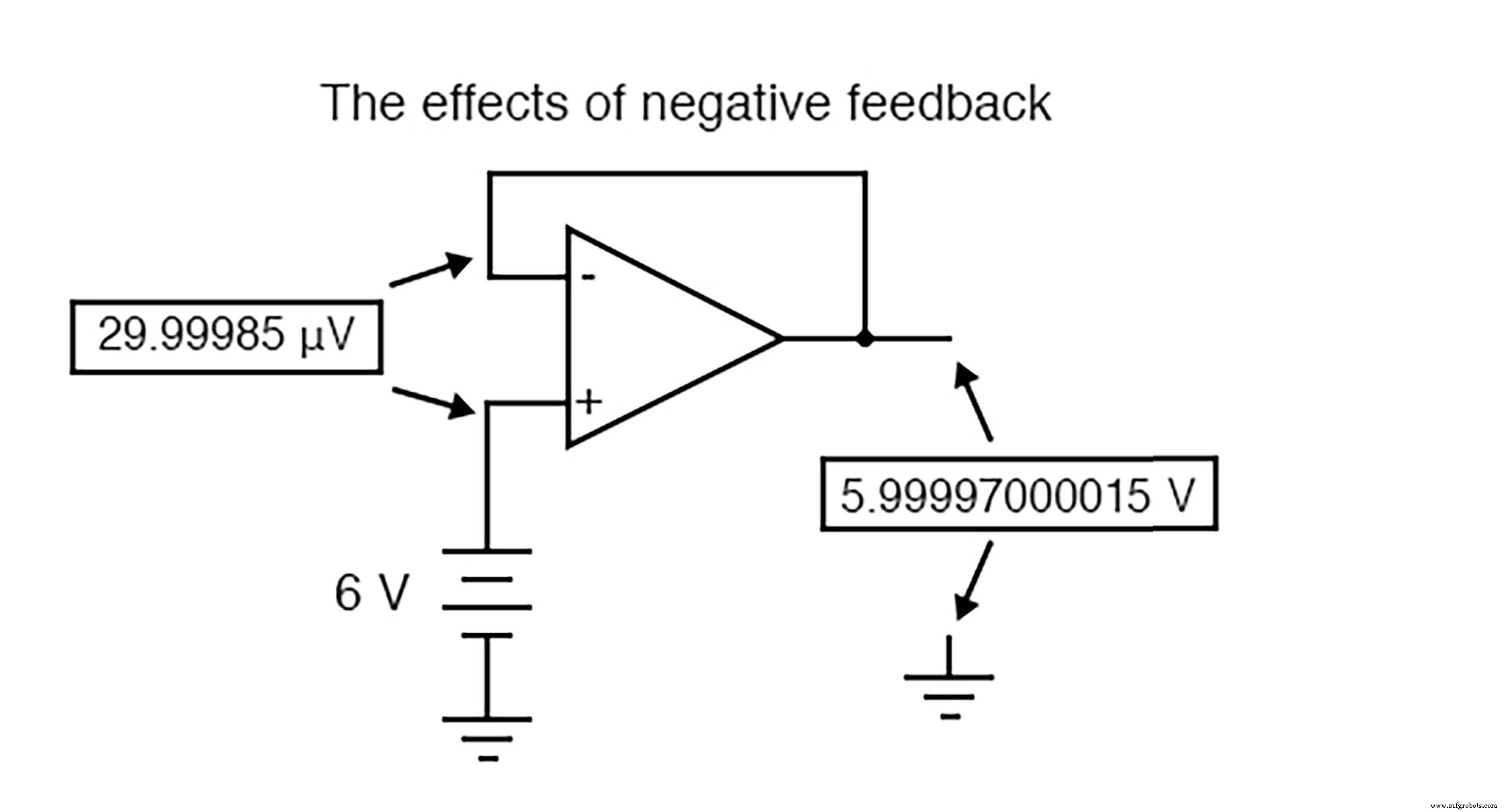
연산 증폭기의 차동 전압 이득이 200,000이고 Vin이 있다고 가정해 보겠습니다. 6V와 같으면 다음 방정식을 사용하여 출력 전압을 계산할 수 있습니다.
$$V_{out} =\frac{6}{1 + (\frac{1}{20,000})} =5.999700015 V$$
이것은 5.99997000015볼트가 출력 터미널에 나타나도록 하기에 충분한 차동 전압(6V - 5.99997000015V =29.99985μV)을 생성하고 시스템은 거기에서 균형을 유지합니다. 보시다시피 29.99985μV는 많은 차동이 아니므로 실제 계산을 위해 두 입력 와이어 사이의 차동 전압이 정확히 0볼트에서 음의 피드백에 의해 유지된다고 가정할 수 있습니다.
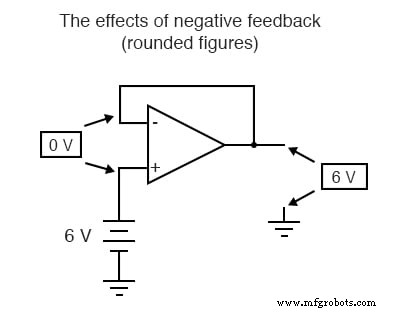
네거티브 피드백이 있는 연산 증폭기를 사용할 때의 한 가지 큰 장점은 연산 증폭기의 실제 전압 이득이 매우 크면 문제가 되지 않는다는 것입니다. 연산 증폭기의 차동 이득이 200,000 대신 250,000이면 출력 전압이 Vin에 조금 더 가깝게 유지된다는 의미입니다. (필요한 출력을 생성하기 위해 입력 사이에 필요한 더 적은 차동 전압). 방금 설명한 회로에서 출력 전압은 여전히 (모든 실제적인 목적을 위해) 비반전 입력 전압과 같습니다. 따라서 회로 설계자가 정확한 이득을 갖는 증폭기 회로를 구축하기 위해 공장에서 연산 증폭기 이득을 정확하게 설정할 필요는 없습니다. 부정적인 피드백은 시스템을 자체 수정합니다. 위의 회로는 전체적으로 1의 안정적인 이득으로 입력 전압을 따를 것입니다.
차동 증폭기 모델로 돌아가서 연산 증폭기는 매우 민감한 널 감지기에 의해 제어되는 가변 전압 소스로 생각할 수 있습니다. , 평형 상태(0볼트)를 감지하기 위해 브리지 회로에 사용되는 미터 이동 또는 기타 민감한 측정 장치의 종류. 가변 전압을 생성하는 연산 증폭기 내부의 "전위차계"는 반전 및 비반전 입력 전압의 "균형을 유지"하기 위해 필요한 위치로 이동하여 "널 감지기"에 전압이 0이 되도록 합니다.
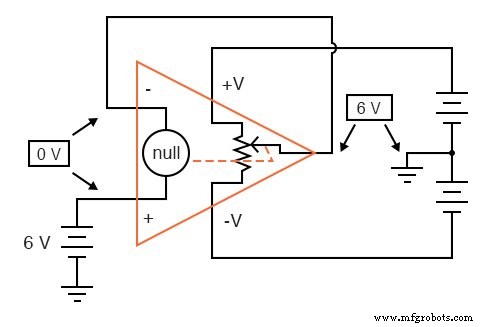
"전위차계"가 0볼트의 "표시"에서 "무효 감지기"를 충족시키는 데 필요한 출력 전압을 제공하기 위해 이동함에 따라 출력 전압은 입력 전압(이 경우 6볼트)과 같아집니다. 입력 전압이 전혀 변경되면 연산 증폭기 내부의 "전위차계"가 위치를 변경하여 "널 감지기"의 균형을 유지(0볼트 표시)하여 출력 전압이 항상 입력 전압과 거의 같게 됩니다.
이것은 연산 증폭기가 출력할 수 있는 전압 범위 내에서 유효합니다. +15V/-15V의 전원 공급 장치와 출력 전압을 최대한 스윙할 수 있는 이상적인 증폭기를 사용하면 +15V와 -15V 사이의 입력 전압을 충실하게 "추종"합니다. 이러한 이유로 위의 회로를 전압 팔로워라고 합니다. . 단일 트랜지스터 대응물인 공통 컬렉터("이미터 팔로워") 증폭기와 마찬가지로 전압 이득이 1이고 입력 임피던스가 높고 출력 임피던스가 낮고 전류 이득이 높습니다. 전압 추종자는 전압 버퍼라고도 합니다. , 및 부하를 직접 구동하기에는 너무 약한(소스 임피던스가 너무 높은) 전압 신호의 전류 소싱 능력을 높이는 데 사용됩니다. 마지막 그림에 표시된 연산 증폭기 모델은 출력 전압이 기본적으로 입력 전압과 어떻게 격리되어 출력 핀의 전류가 입력 전압 소스에 의해 전혀 공급되지 않고 연산에 전력을 공급하는 전원 공급 장치에서 공급되는지를 보여줍니다. -앰프.
많은 연산 증폭기가 출력 전압을 정확히 +V/-V 전원 공급 장치 레일 전압으로 스윙할 수 없다는 점을 언급해야 합니다. 모델 741은 포화 상태일 때 출력 전압이 +V 전원 전압의 약 1볼트 내에서 그리고 -V 전원 전압의 약 2볼트 내에서 피크가 될 수 없는 것 중 하나입니다. 따라서 +15/-15볼트의 분할 전원 공급 장치를 사용하면 741 연산 증폭기의 출력이 +14볼트만큼 높거나 -13볼트만큼 낮을 수 있지만 더 이상 올라갈 수는 없습니다. 이것은 바이폴라 트랜지스터 설계 때문입니다. 이 두 가지 전압 제한을 양의 포화 전압이라고 합니다. 및 음의 포화 전압 , 각각. 최종 출력 단계에 전계 효과 트랜지스터가 있는 모델 3130과 같은 다른 연산 증폭기는 두 전원 공급 장치 레일 의 밀리볼트 내에서 출력 전압을 스윙할 수 있습니다. 전압. 결과적으로 양 및 음의 포화 전압은 공급 전압과 거의 동일합니다.
검토:
<울>관련 워크시트:
<울>산업기술
교류 발전기가 AC 전압을 생성할 때 전압은 시간이 지남에 따라 극성을 전환하지만 매우 특정한 방식으로 전환됩니다. 시간이 지남에 따라 그래프로 표시하면 교류 발전기의 이 교류 극성 전압에 의해 추적되는 파동은 사인파라고 하는 독특한 모양을 취합니다. :아래 그림 시간 경과에 따른 AC 전압 그래프(사인파) 전기 기계식 교류 발전기의 전압 플롯에서 한 극성에서 다른 극성으로의 변화는 부드러운 것으로 전압 레벨은 영점(크로스오버) 지점에서 가장 빠르게 변하고 피크에서 가장 천천히 변합니다. 0 ~ 360도의 수평
타이머 또는 멀티 바이브레이터 오늘 우리는 타이머 또는 다중 진동기라고 하는 디지털 전자 애플리케이션에 대해 논의할 것입니다. “타이머는 디지털 회로에 특정 주기 신호를 제공하는 회로입니다. 이러한 신호는 해당 시스템의 상태를 변경할 수 있습니다. 멀티 바이브레이터는 멀티 바이브레이터라고 하는 높고 낮은 레벨로 구성된 신호를 제공하는 회로입니다. 일반적으로 멀티 바이브레이터는 하나의 증폭기의 출력이 양의 피드백으로 두 번째 증폭기의 입력에 연결되는 2단 증폭기입니다. 두 증폭기는 하나의 트랜지스터가 포화 모드 또는 ON이면 두