

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 | |||
| × | 3 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 3 | |||
 |
| × | 3 | |||
| × | 1 | ||||
 |
| × | 1 |
 |
| |||
 |
|
설명
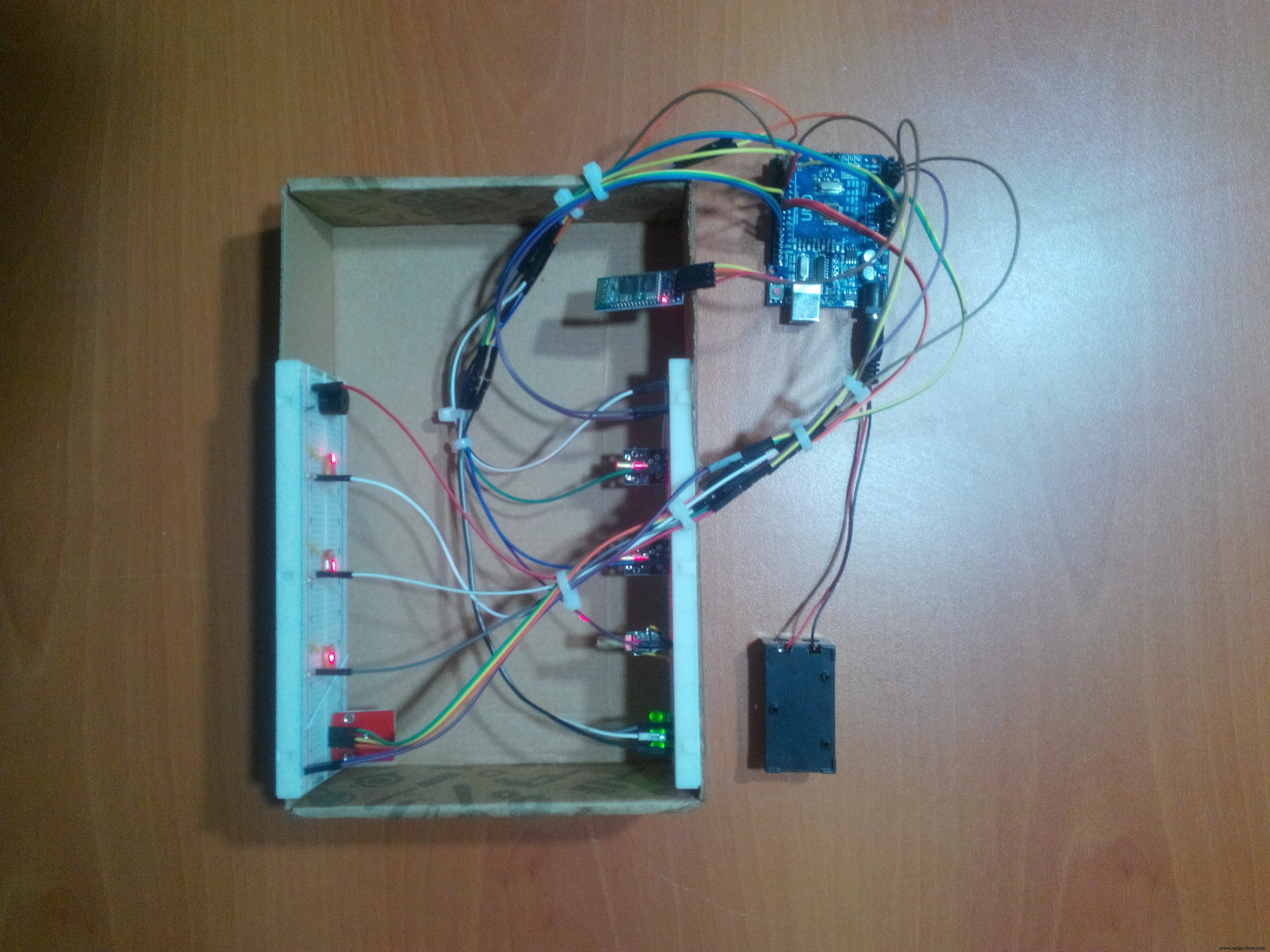
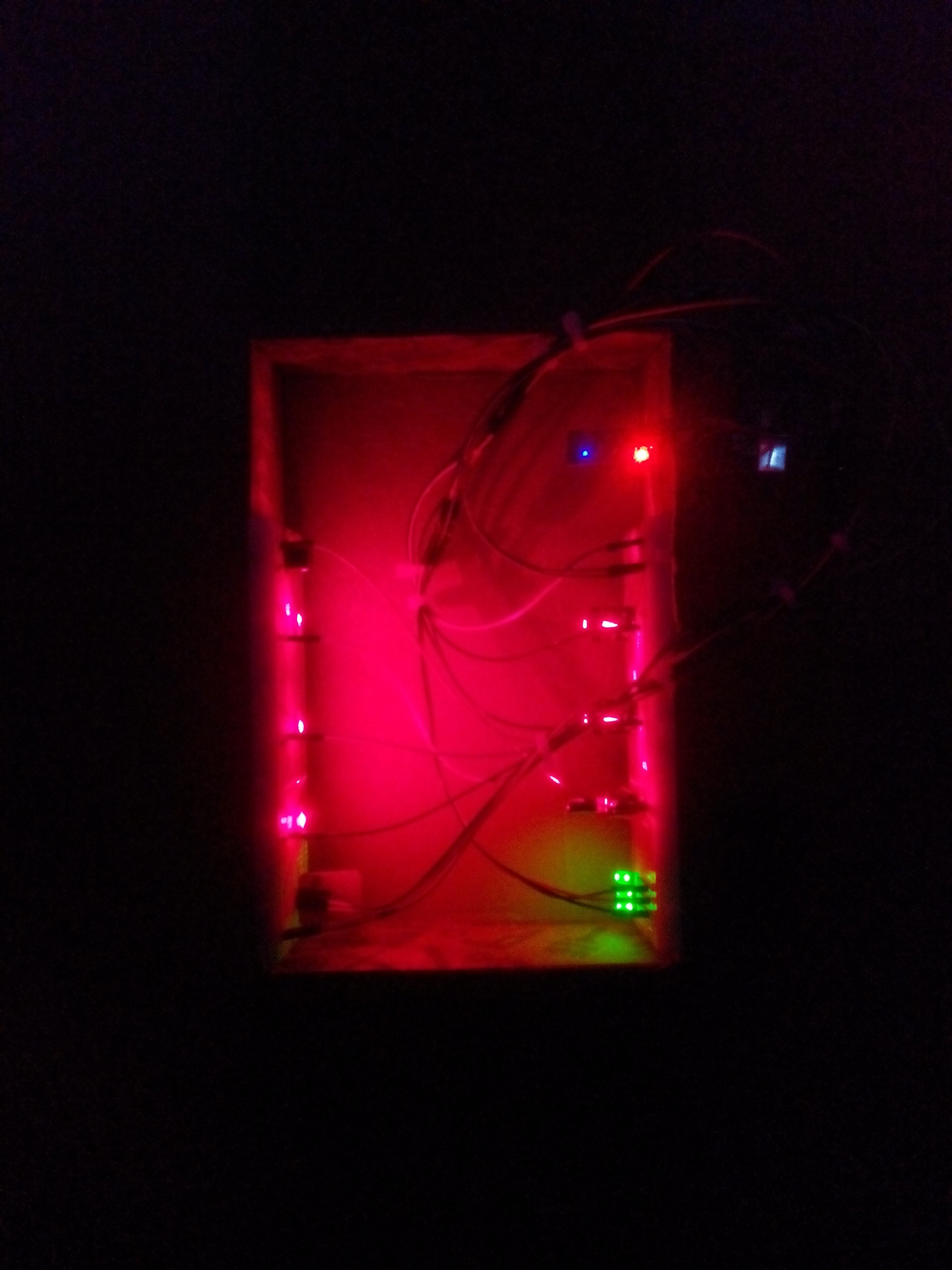
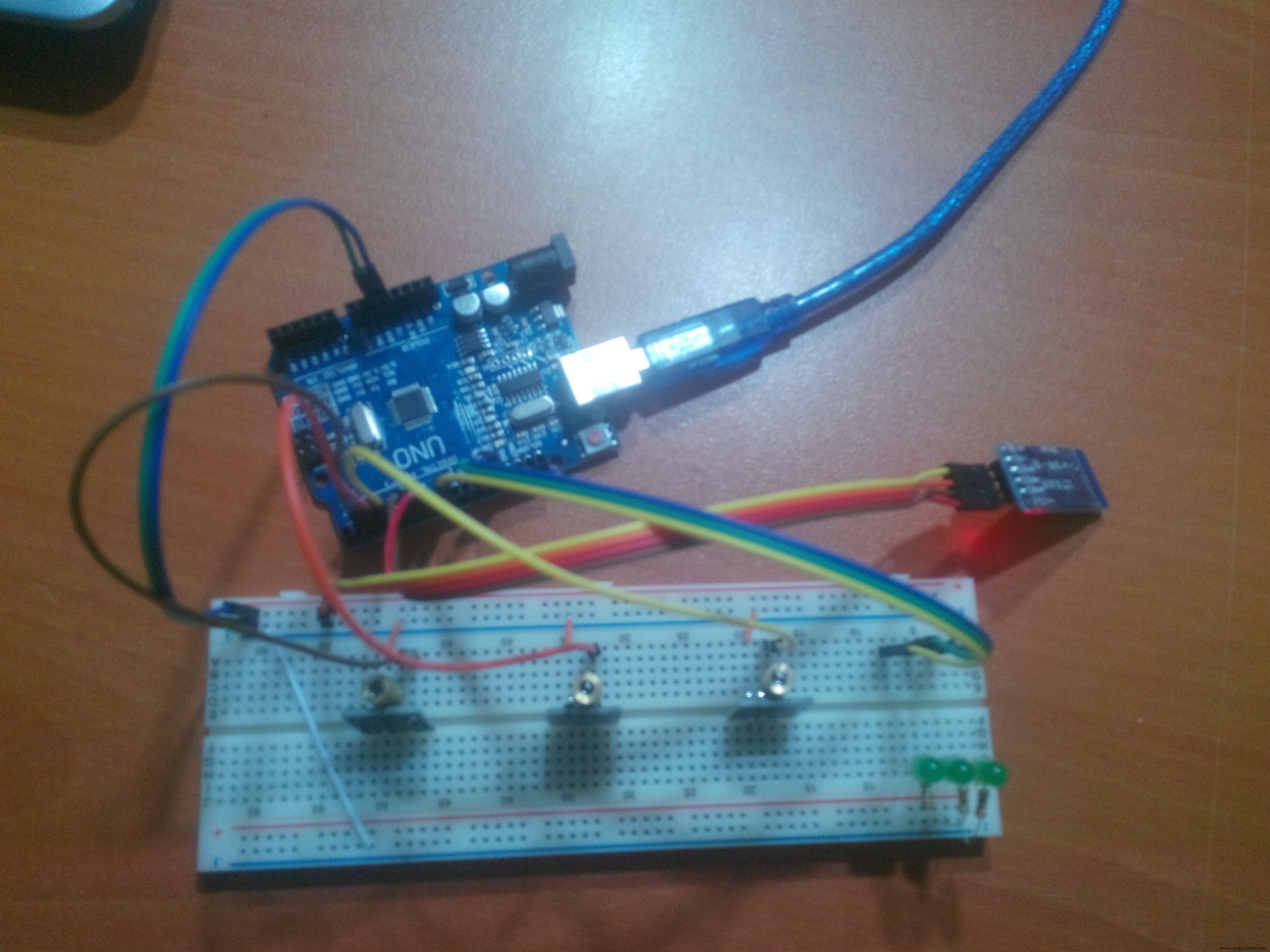
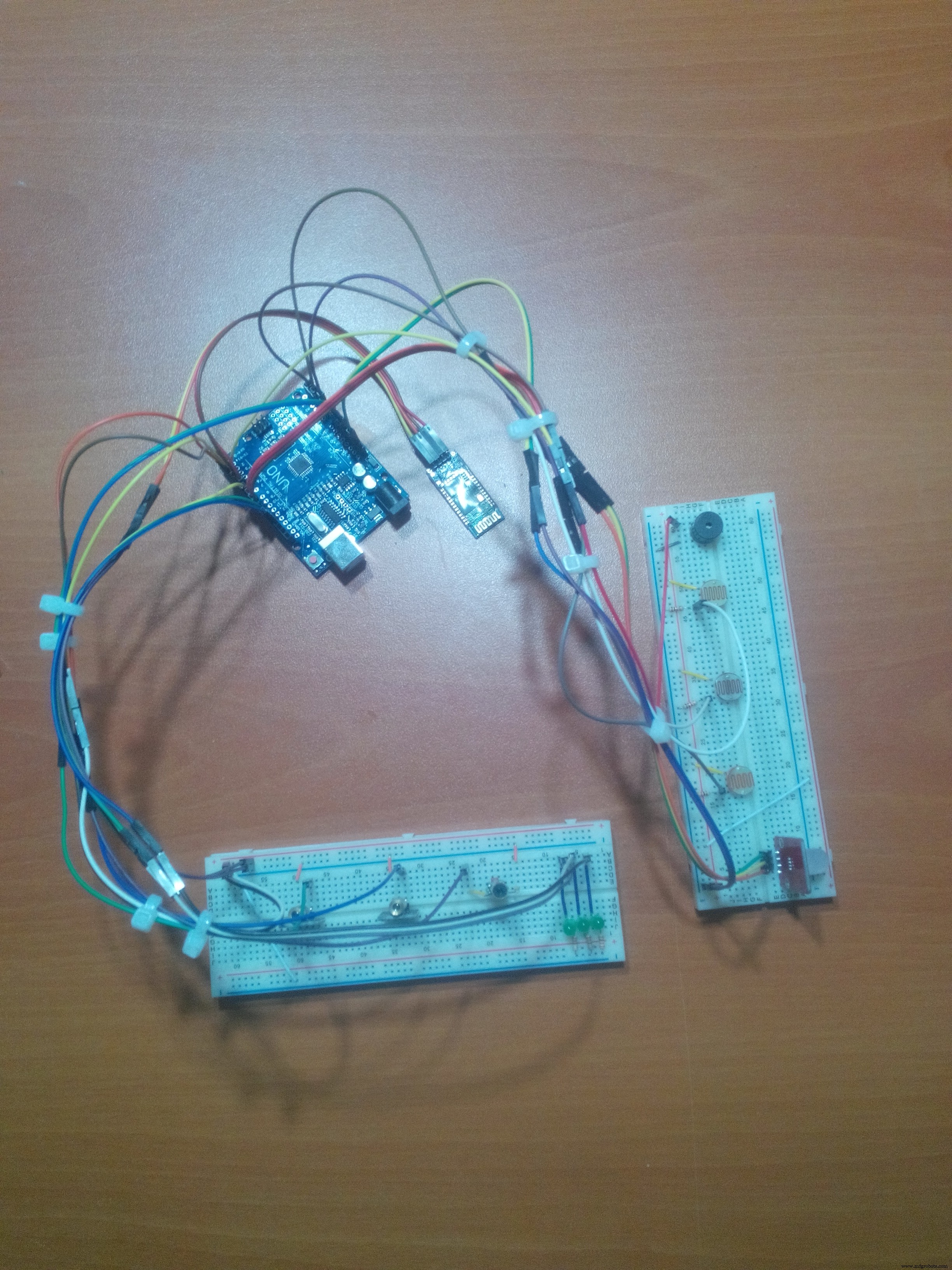
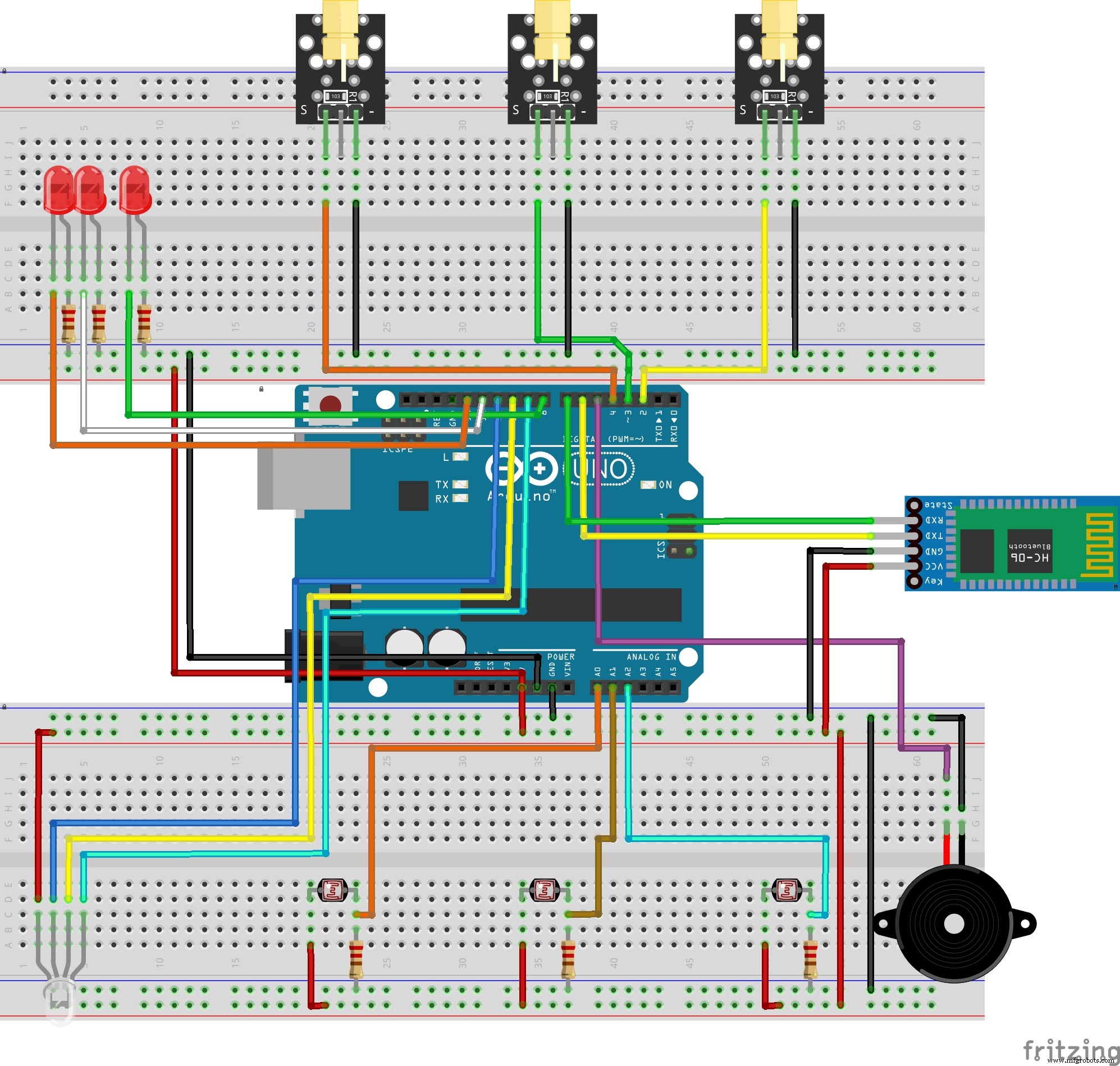
먼저, 피플 카운터는 입구를 통과하는 사람들의 수를 감지하는 장치입니다. 나는 2주 동안 휴가를 가야 할 때 내 방을 확보하기 위해 피플 카운터를 만들어야 한다고 생각했다. 그리고 방에 들어갈 수 있는 권한이 없는 사람들에게 경고하는 알람으로 피플 카운터를 사용하고 싶었습니다. 레이저는 속도의 특성 때문에 LDR로 무언가를 정확하게 계산하는 가장 좋은 옵션이므로 계산 작업에 LDR과 함께 레이저를 사용하기로 결정했습니다. 내 방에는 3개의 가능한 출입구(2개의 문과 1개의 창)가 있으므로 3개의 레이저와 3개의 LDR을 사용했습니다. 그런데 어느 입구의 레이저가 열려 있는지, 알람이 켜져 있는지 여부를 선택하려면 장치를 원격으로 제어해야 한다는 것을 깨달았습니다. 그래서 HC-06 블루투스 모듈을 추가하여 내가 만든 안드로이드 앱으로 기기와 통신을 했습니다. 또한 Android 앱은 관찰하려는 입구에 들어가는 사람들의 수를 표시합니다.
내 프로젝트와 기사를 지원하려면 여기 내 웹사이트를 방문하세요. :)
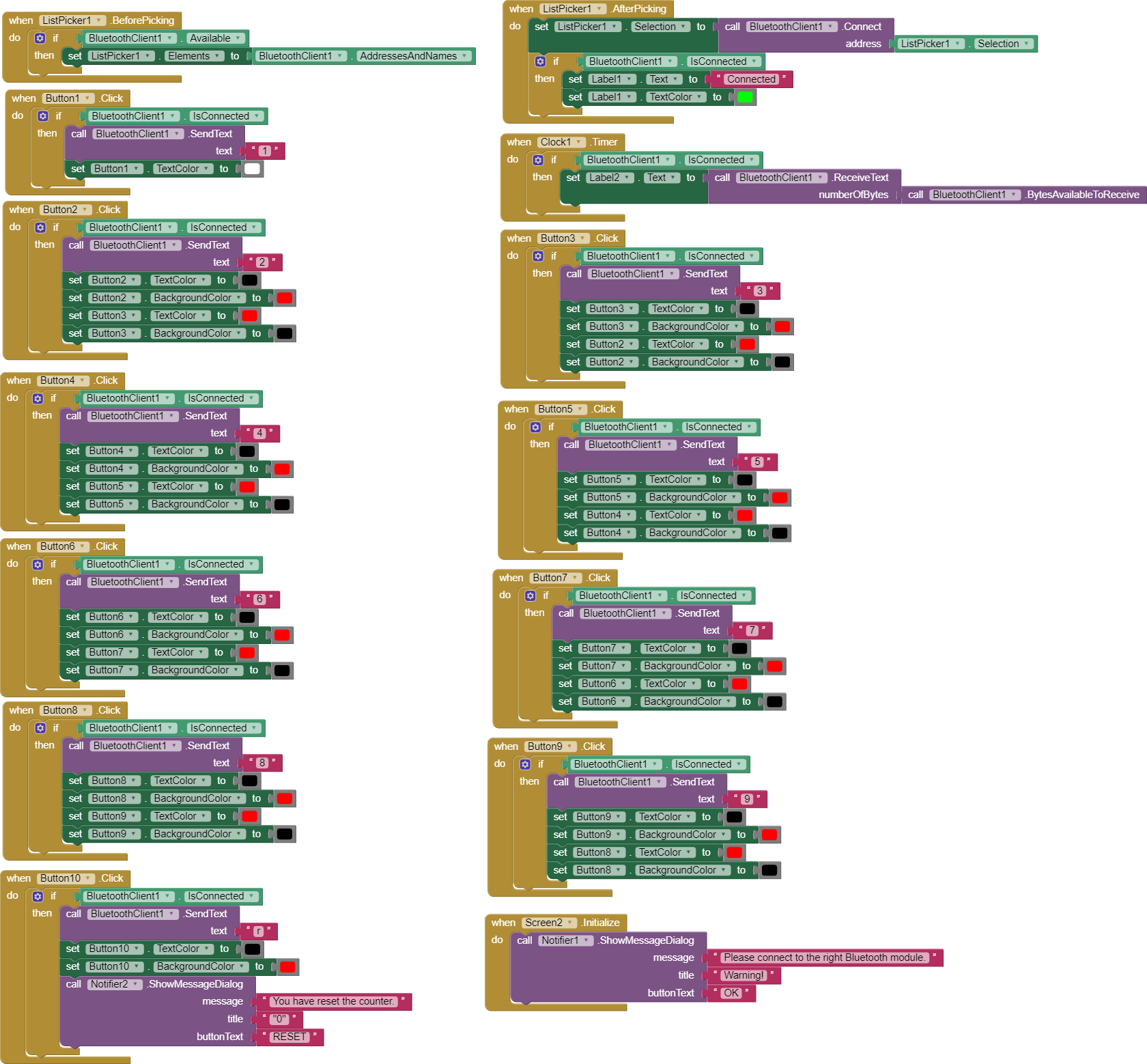
앱 만들기
HTML에서 Java로 코드를 변환하거나 Python으로 앱을 프로그래밍하는 등 Android 앱을 만드는 방법에는 여러 가지가 있습니다. 그러나 MIT App Inventor는 안드로이드 앱을 만들고 싶지만 아직 iOS와 호환되지 않는다는 점을 잊지 말자 드래그 앤 드롭 구조로 되어 있어 가장 쉬운 방법이다.
피플 카운터! 는 앱의 이름이며 Screen1 및 Screen2라는 두 개의 화면을 포함합니다.
화면1
메인 화면으로 계속 진행하기 위한 홈 화면이지만 먼저 MIT 앱 인벤터에서 설정한 비밀번호를 정확하게 입력해야 합니다. (제가 설정한 기본 비밀번호는 "counter"입니다.)
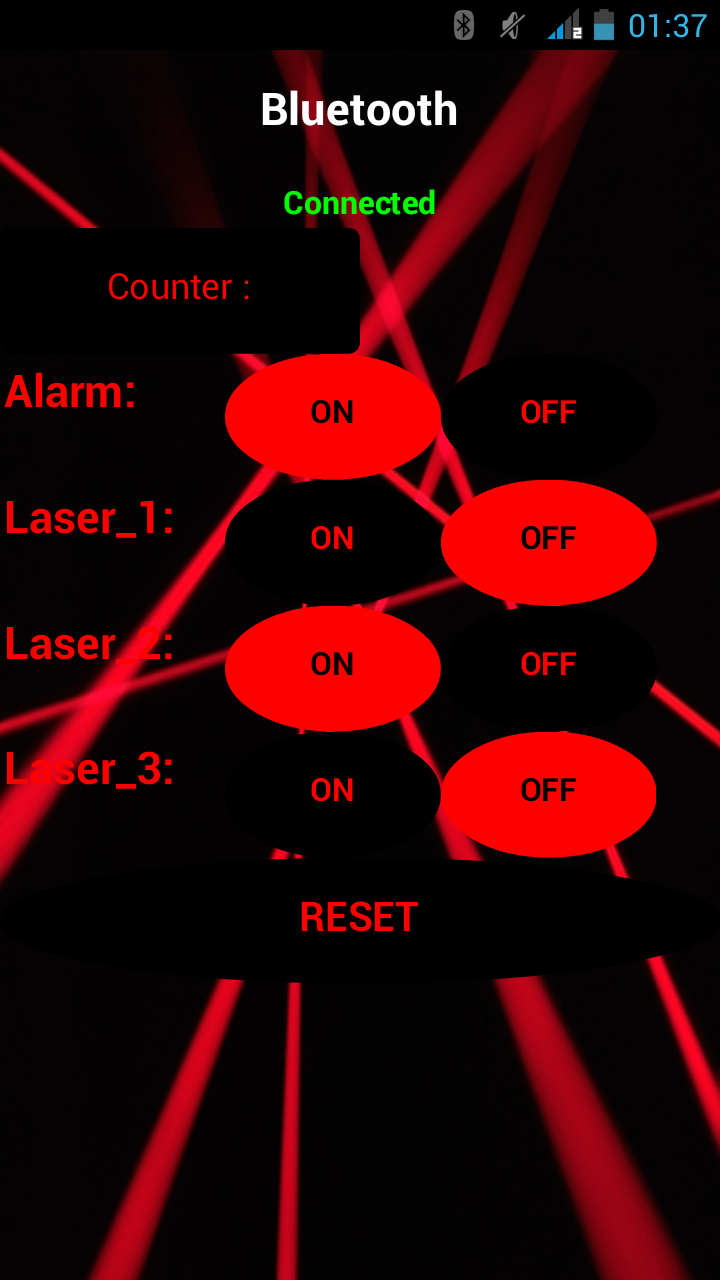
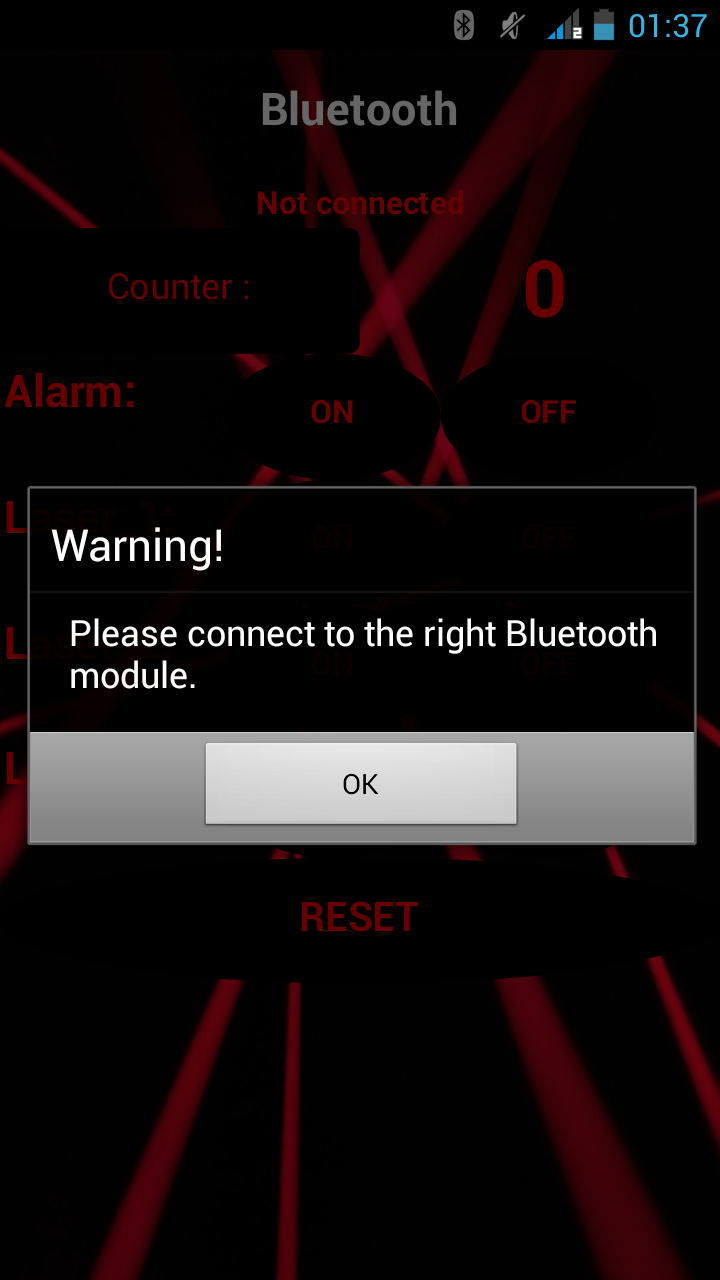
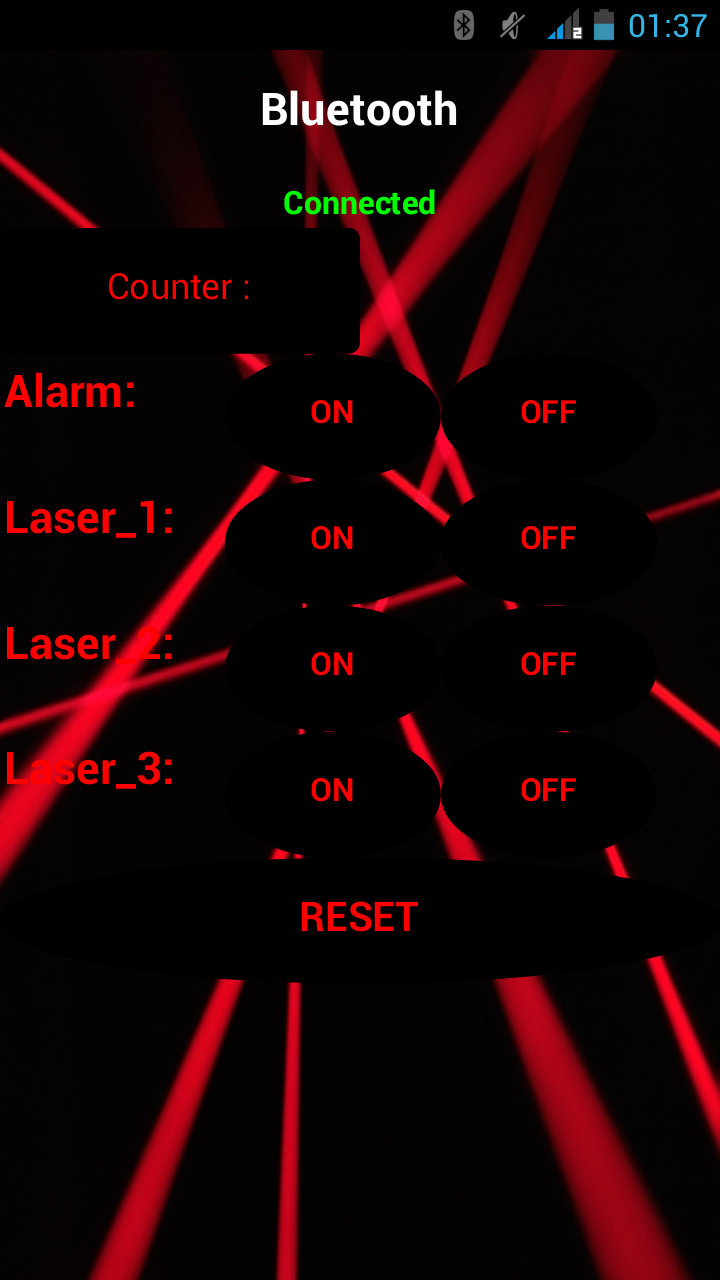
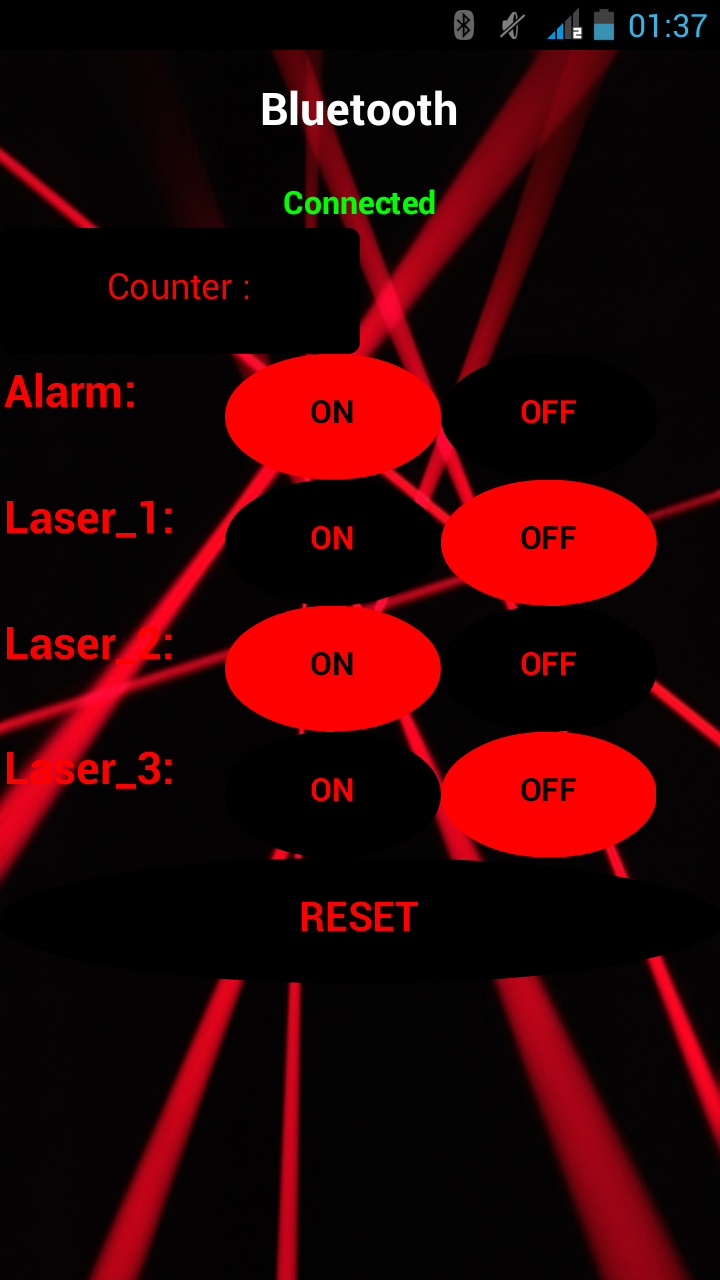
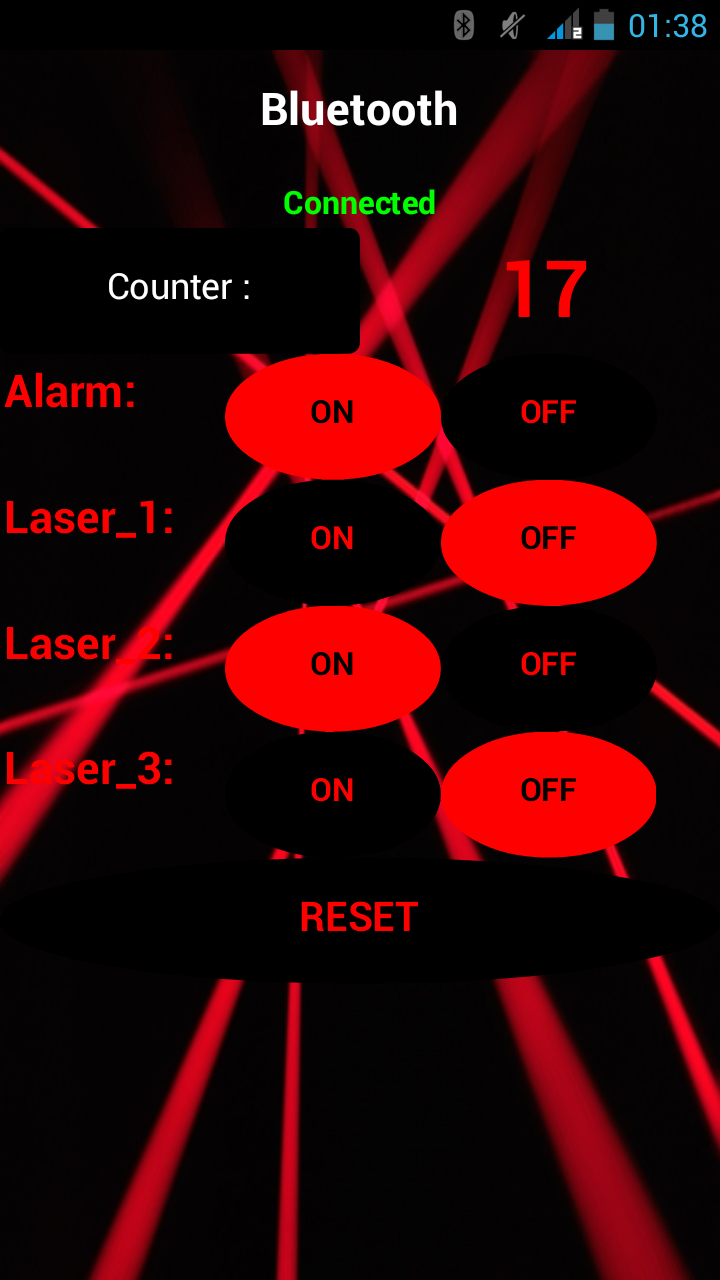
화면2
아두이노 보드를 제어하기 위한 메인 화면이자 메뉴이며, 아두이노에서 보낸 인원 계수기의 결과가 이 화면에 표시됩니다.
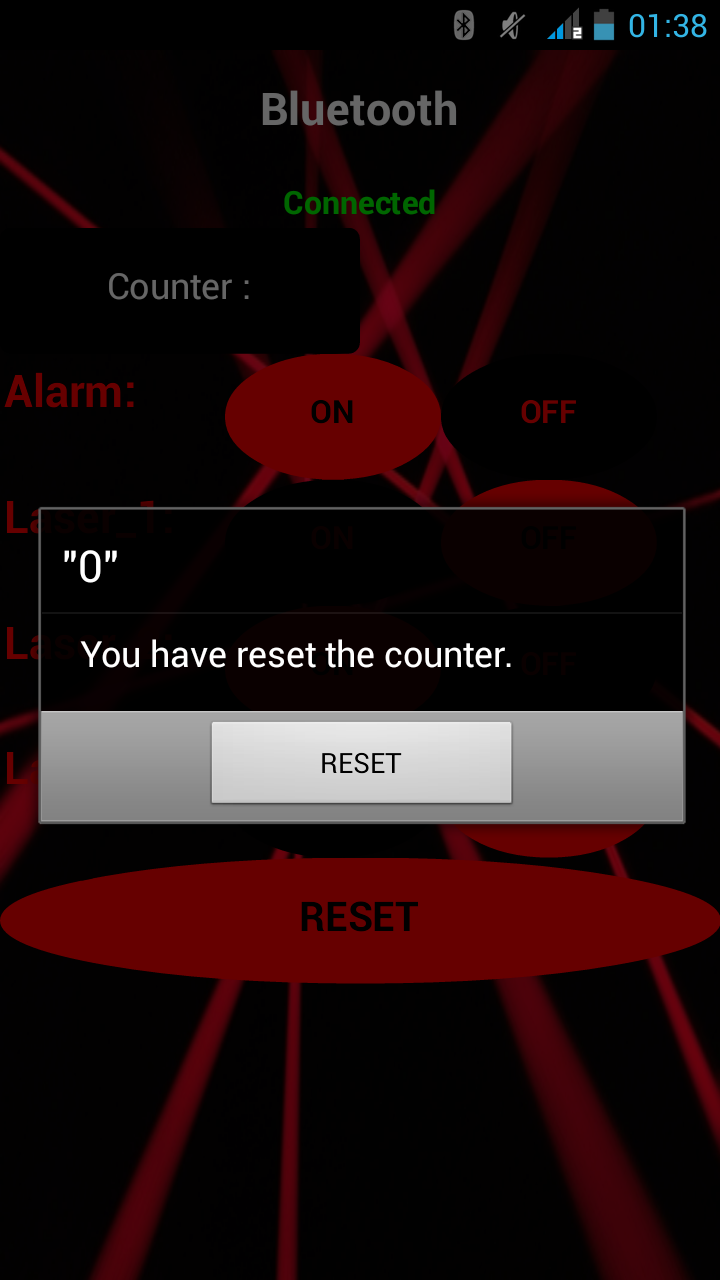
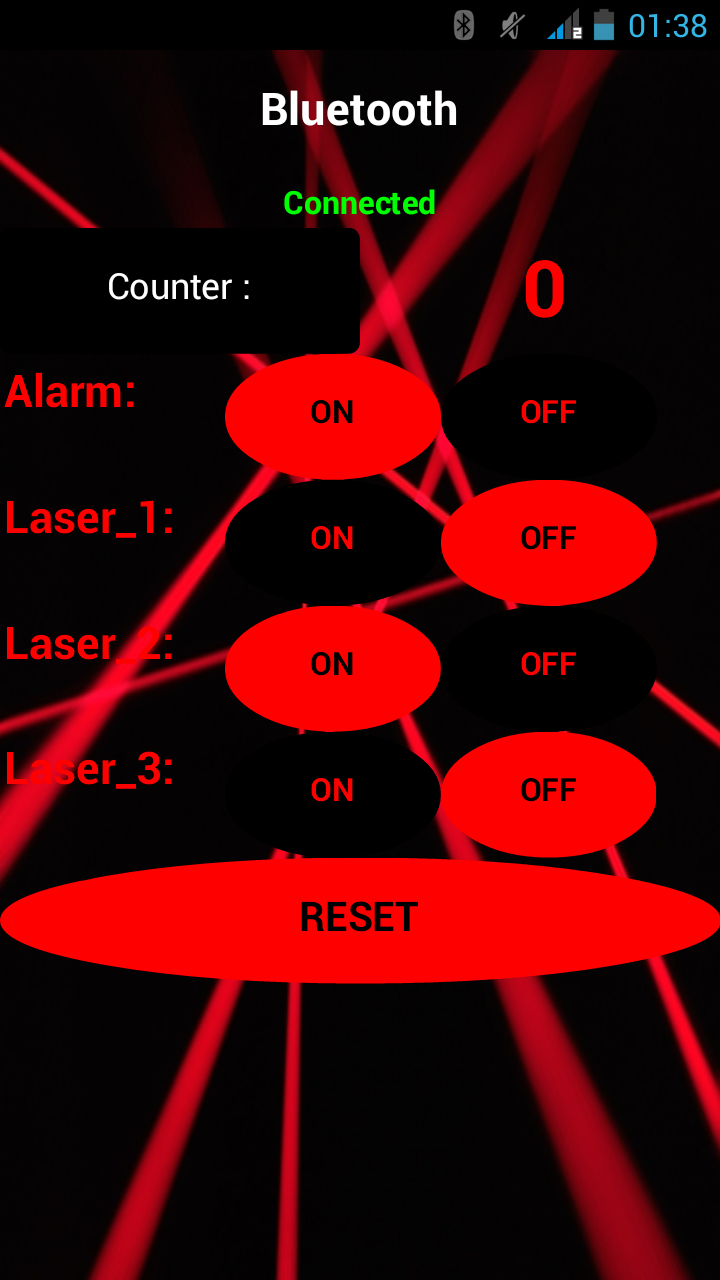
어떤 레이저가 켜져 있는지 또는 알람이 열려 있는지 여부를 선택할 수 있습니다. 또한 이 화면에서 인원 계수기의 결과를 보고 0부터 시작하도록 설정할 수 있습니다.
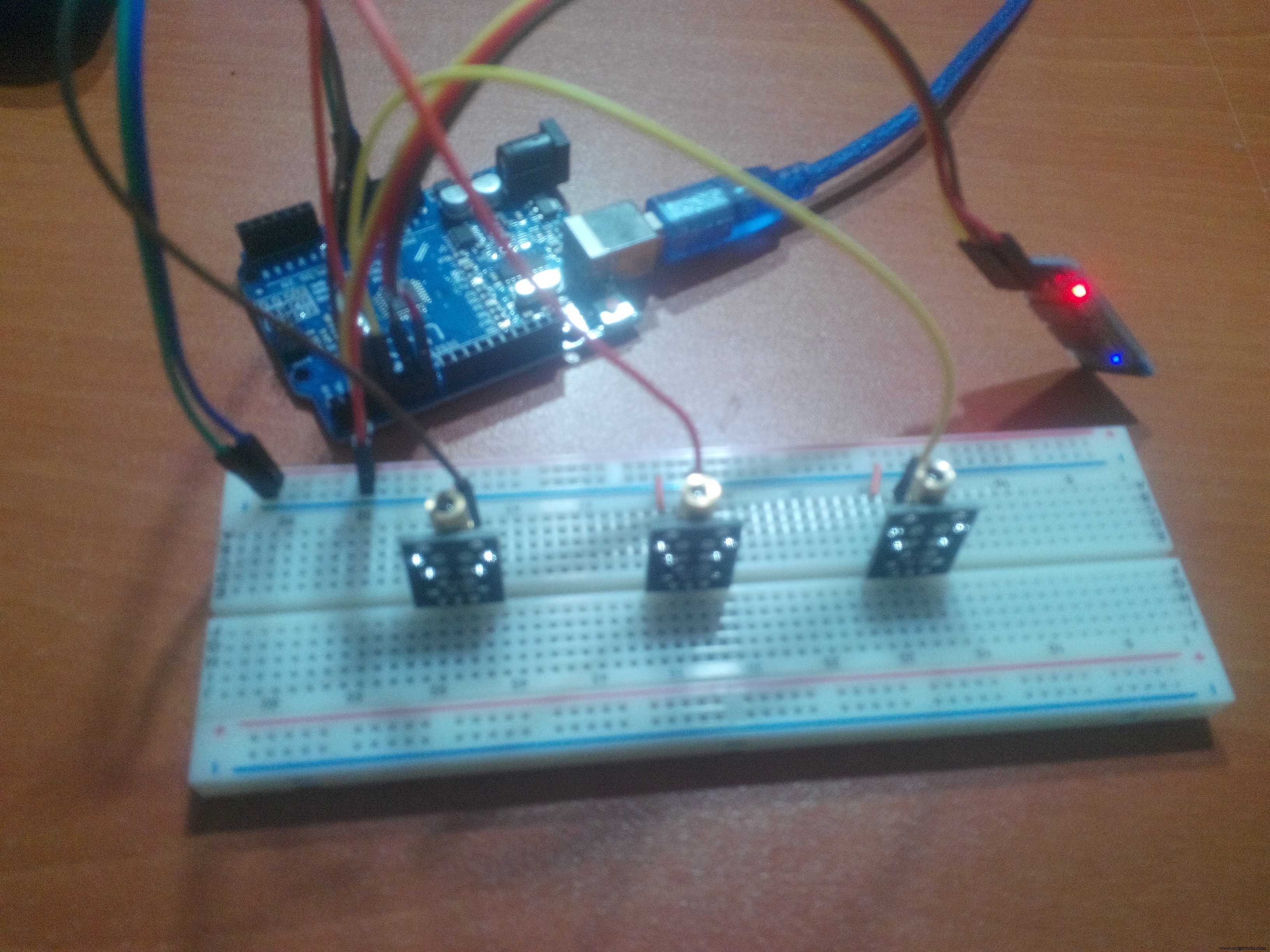
레이저와 LDR을 사용하여 인원 계수기를 만드는 방법
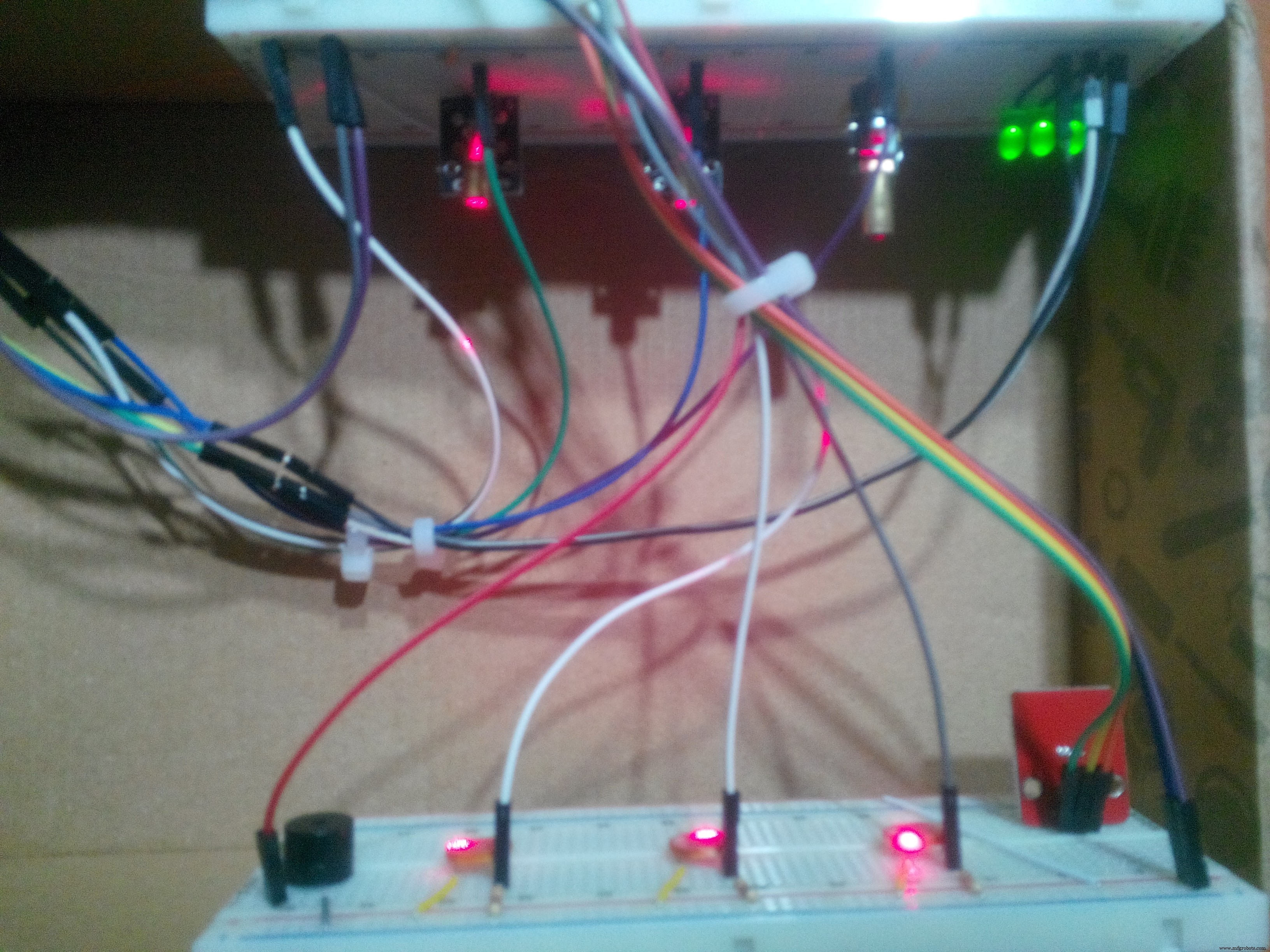
레이저(방사선의 유도 방출에 의한 광 증폭)는 기본적으로 광선의 패키지를 매우 직선을 통해 대상에 보내는 장치입니다. 그리고 LDR(light-dependent resistance)은 레이저가 스스로를 향하면 빛의 강도 증가를 쉽게 감지할 수 있습니다. 레이저와 LDR 사이에 장애물이 있으면 LDR이 빛의 세기 감소를 감지합니다. 따라서 최적 수준의 범위가 감소할 때마다 계산할 수 있다면 사람 계수기가 있을 것입니다. LDR에 대한 나의 실험에 따르면 최적 수준의 범위는 150에서 350 사이여야 합니다.


연결 <울>
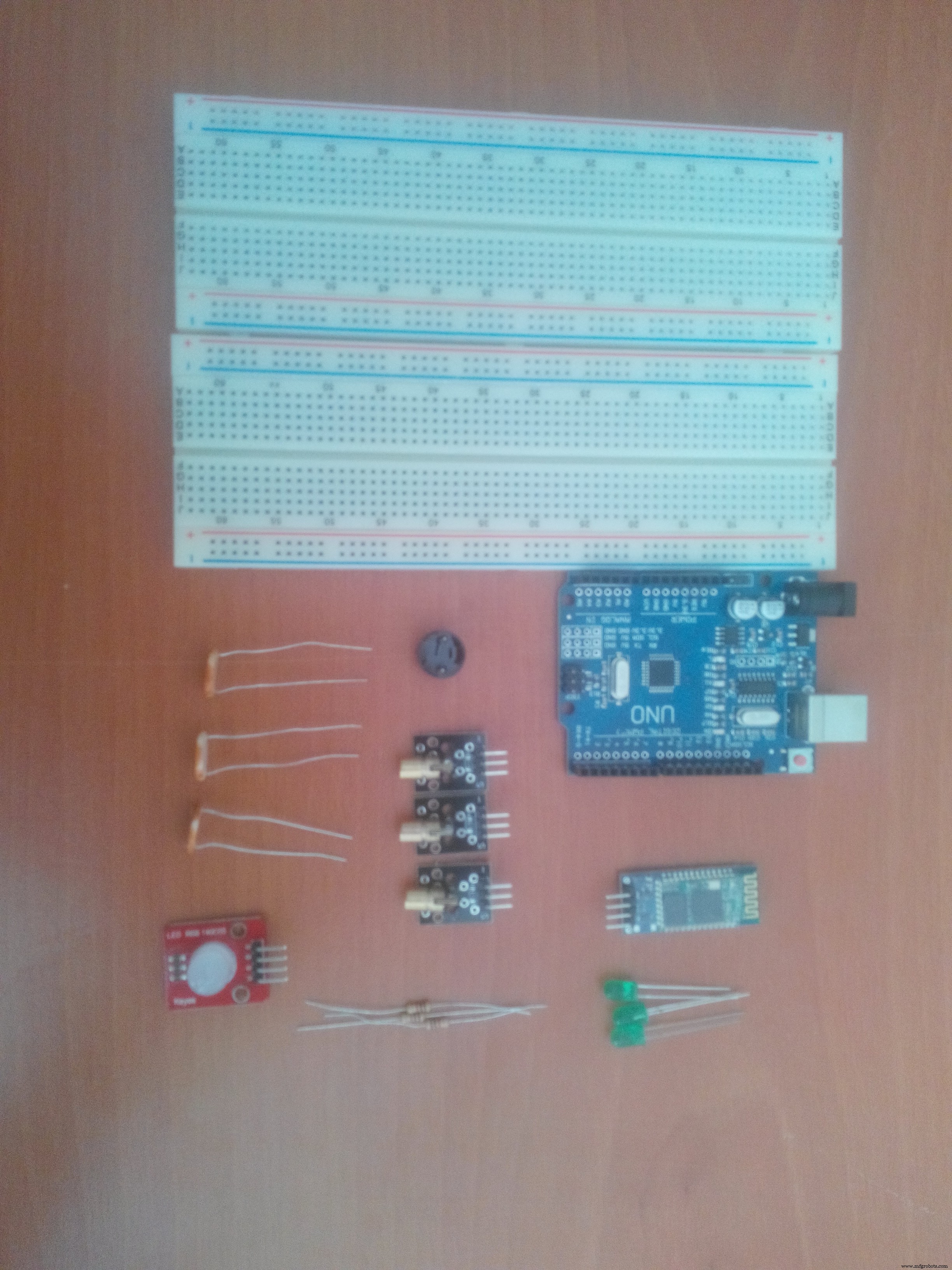
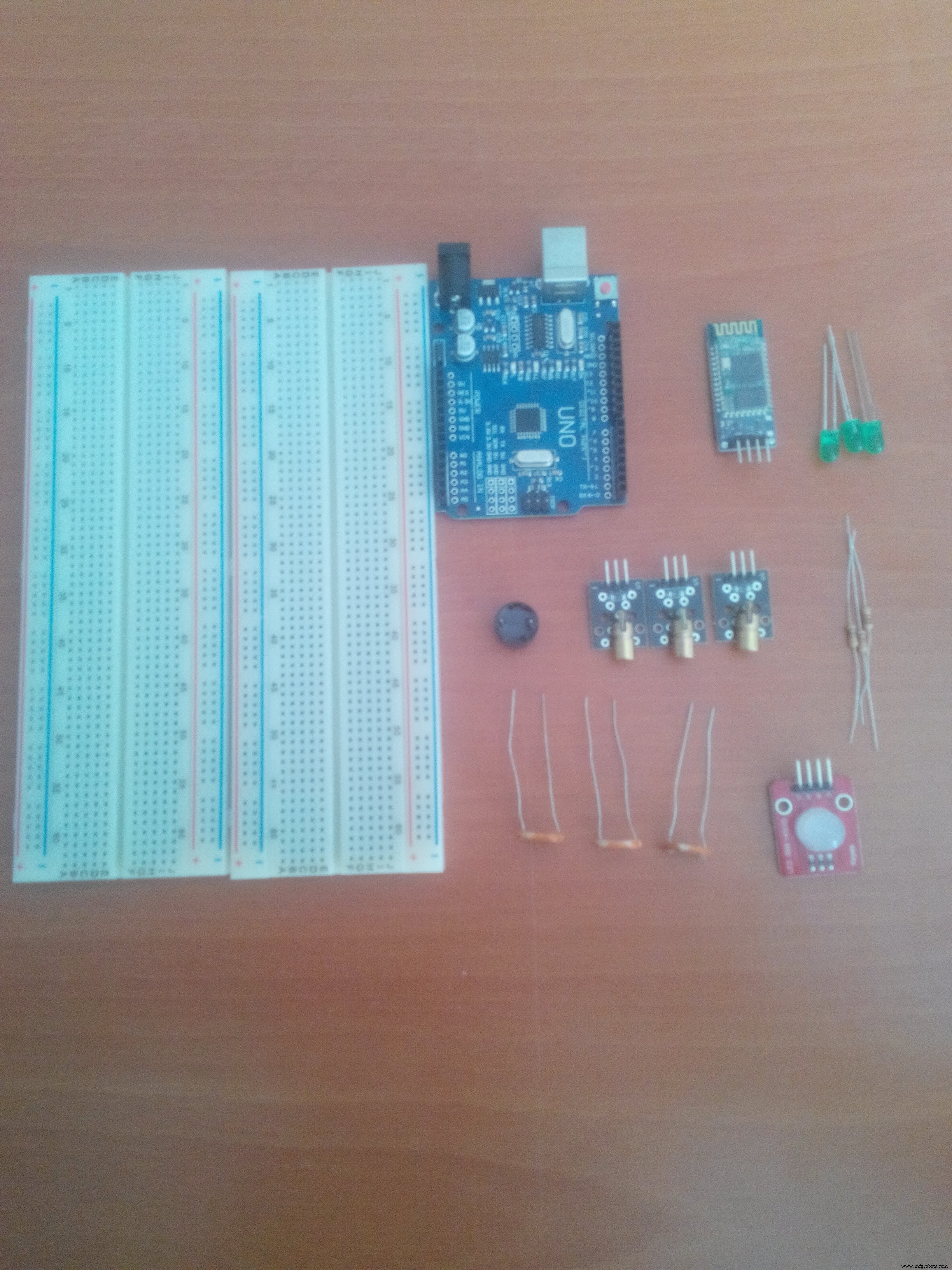
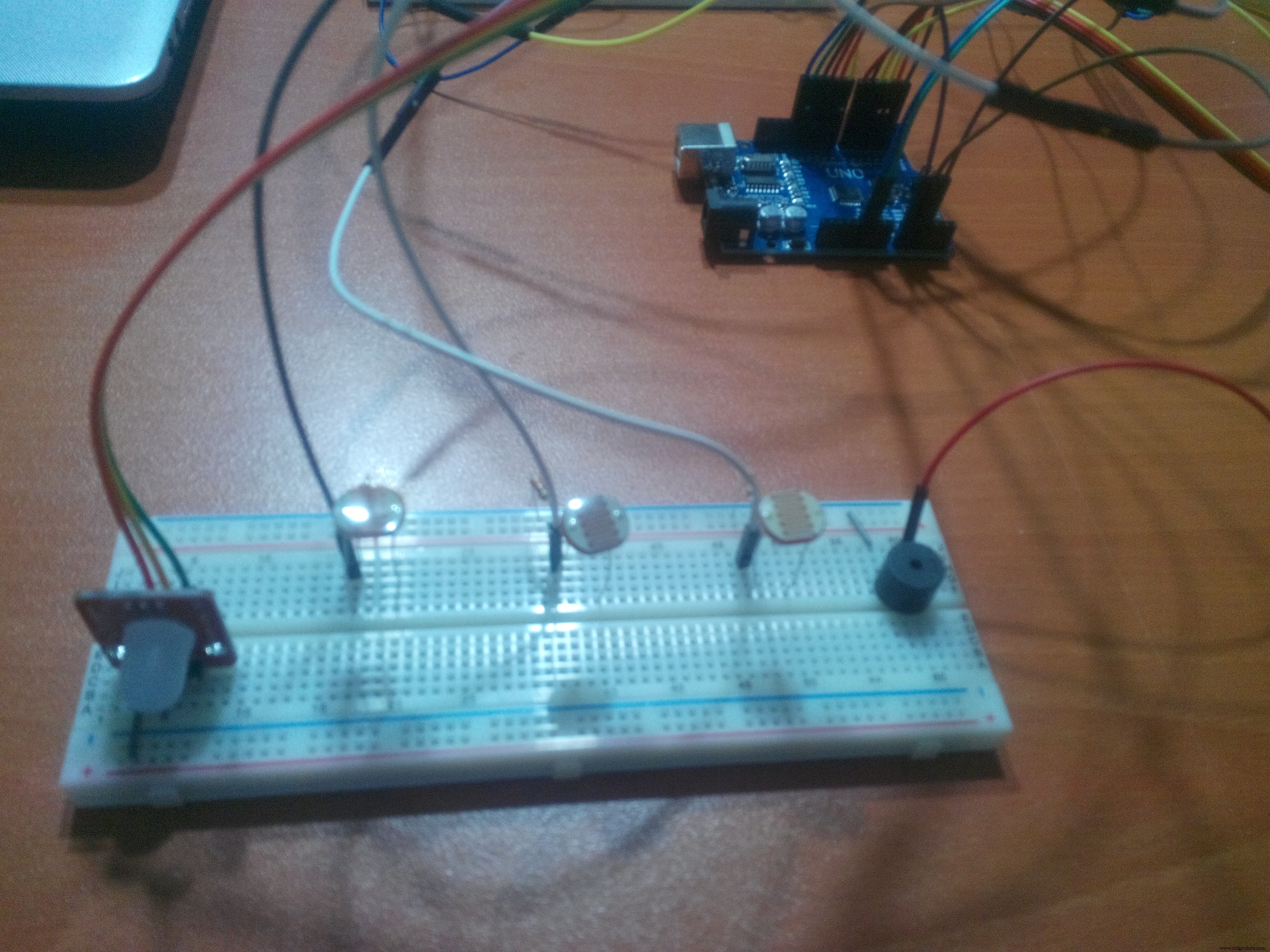
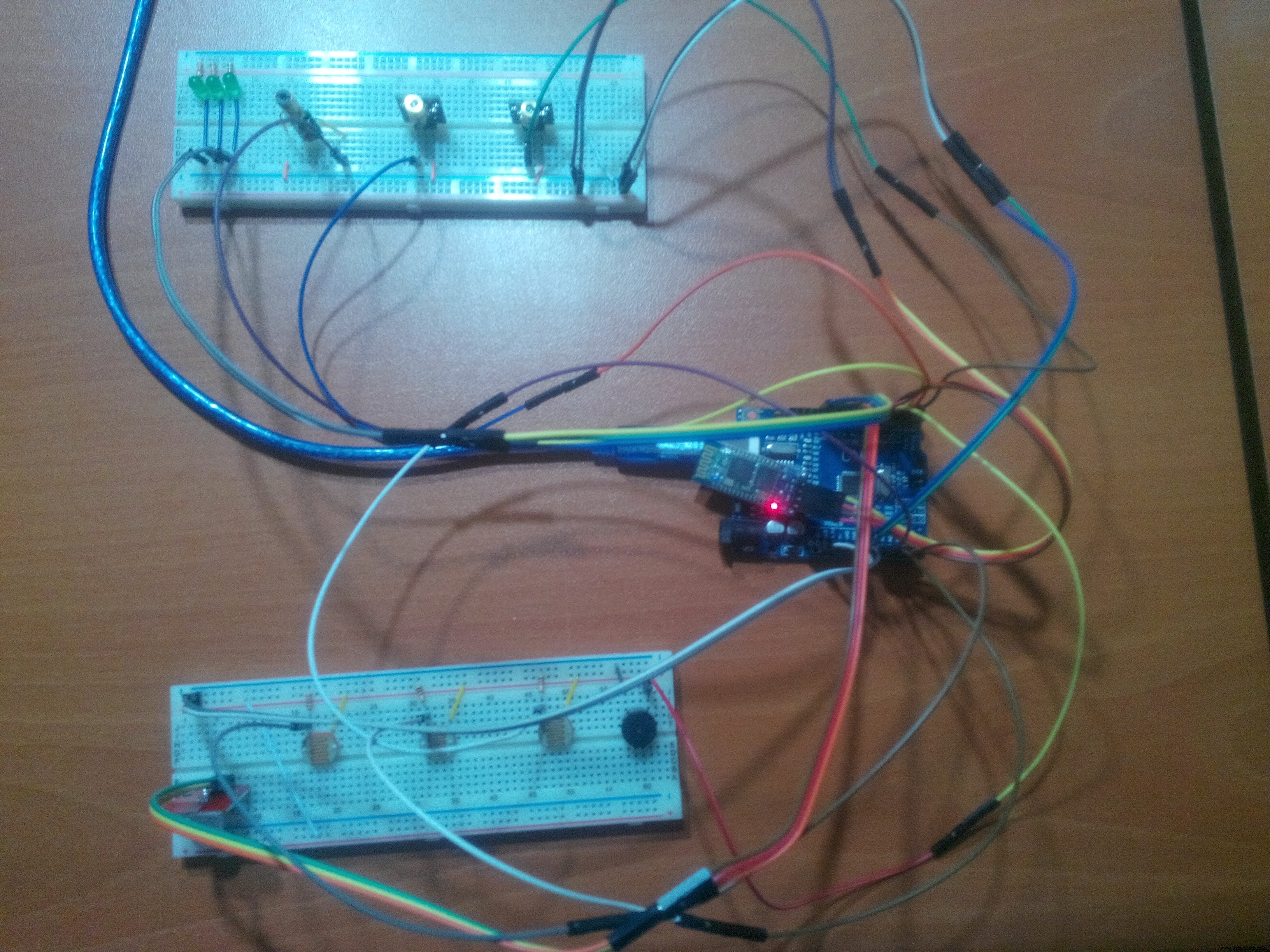

모든 부품의 연결을 완료하기 직전에 레이저가 LDR을 향하고 있는지 확인하십시오.
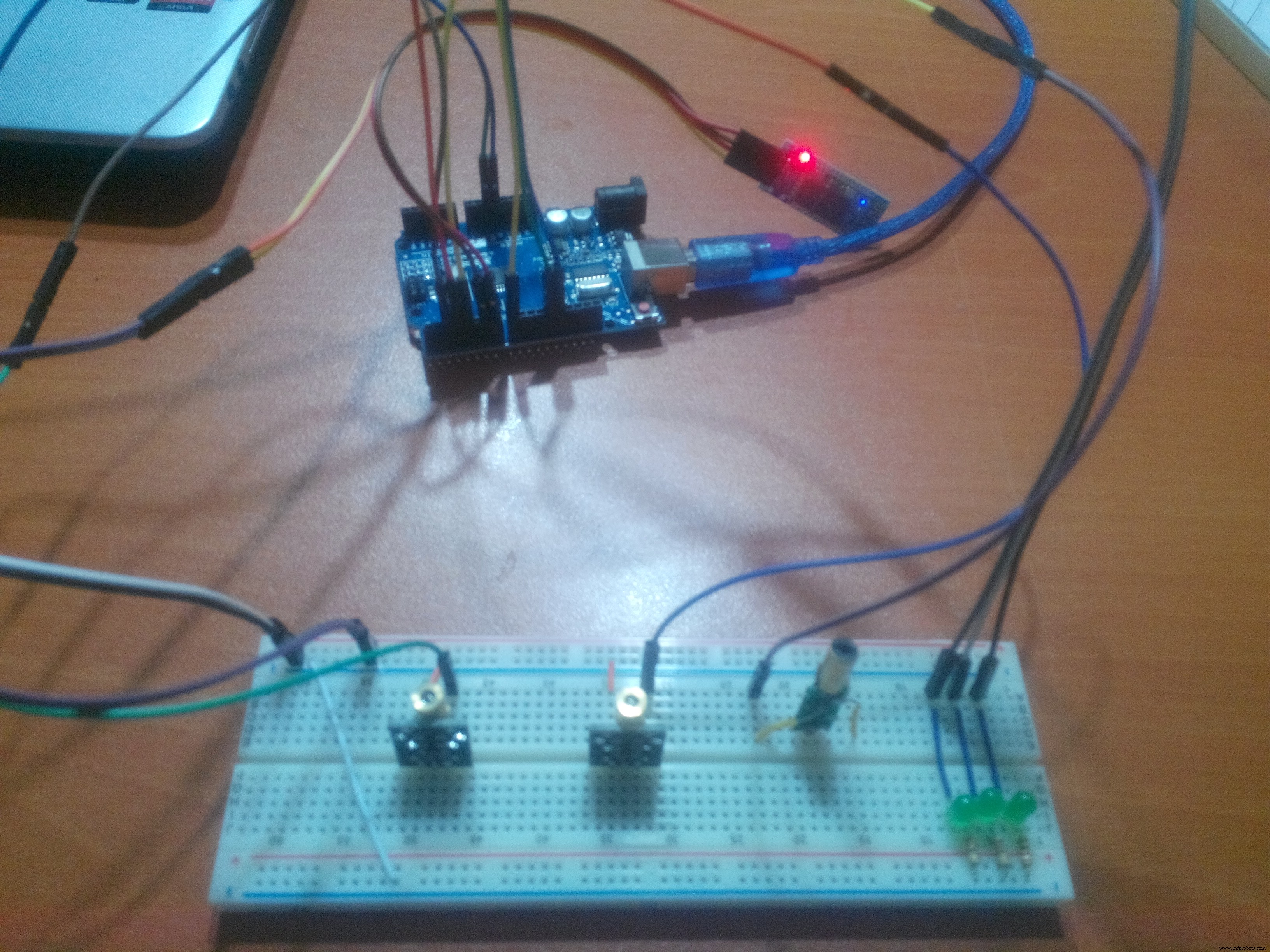
장치를 테스트하고 테스트 비디오를 녹화한 후 장치를 3개의 다른 입구에 대해 3개의 부분으로 나누었습니다. 나는 그것을 사용한 이후로 내 방의 보안에 대해 의심 한 적이 없습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
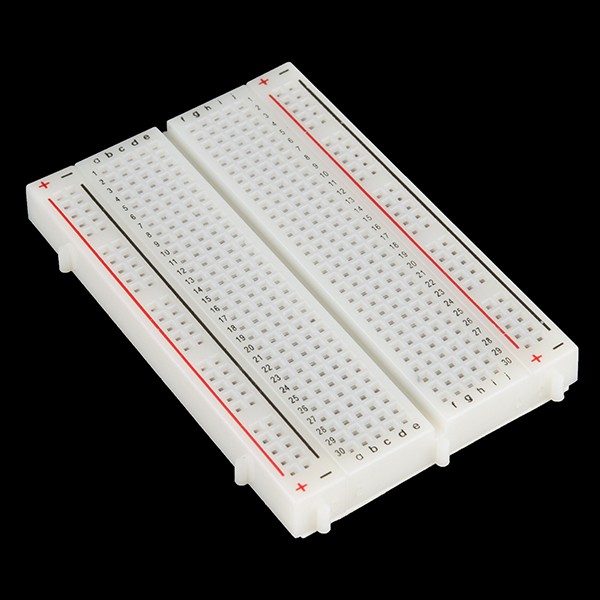
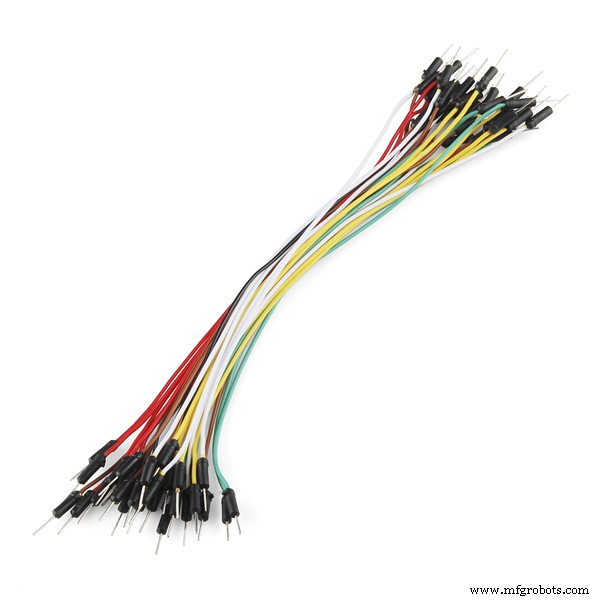
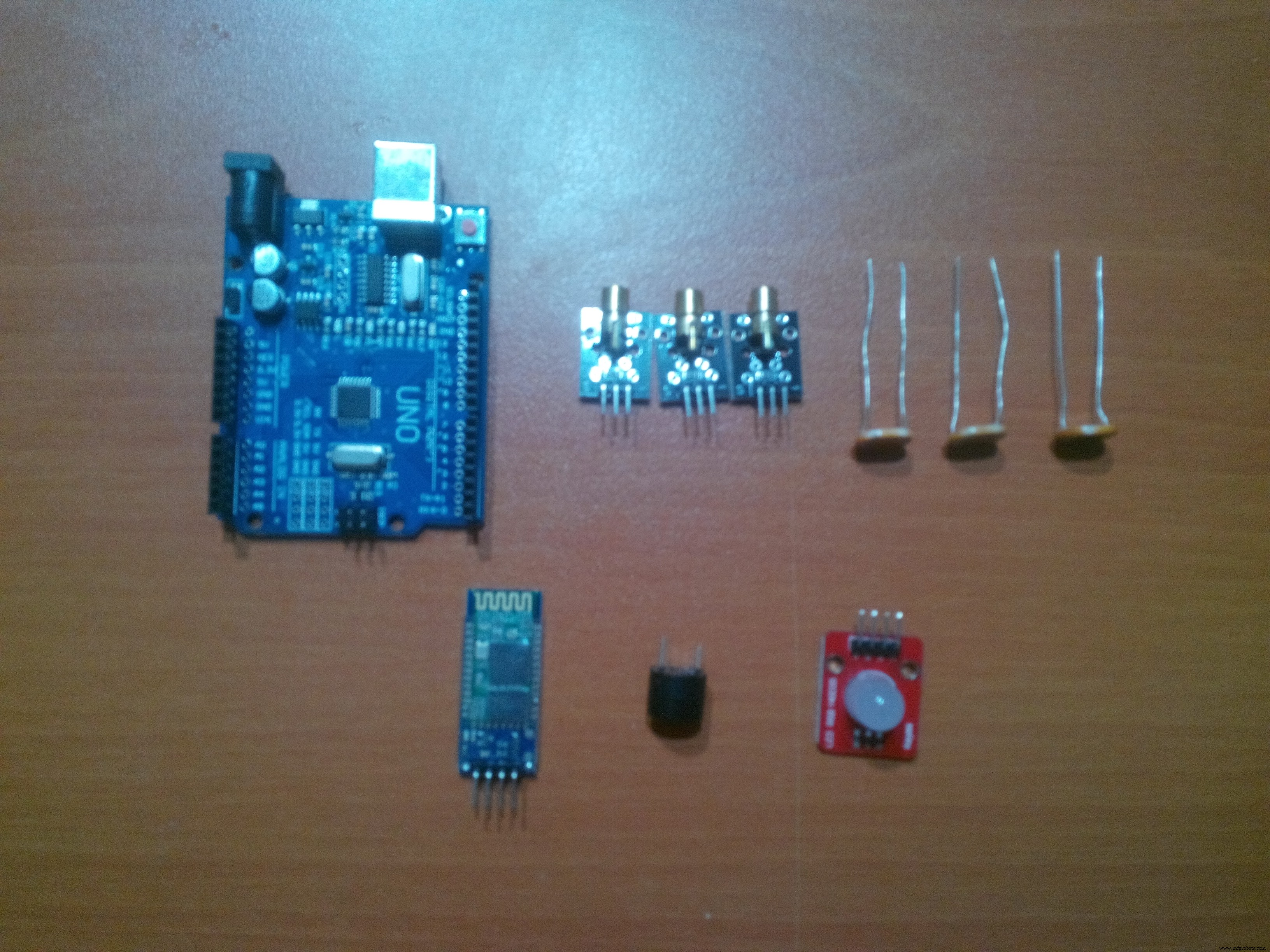
구성품 및 소모품 Arduino UNO × 1 초음파 센서 - HC-SR04(일반) × 1 화이트 led × 1 LDR × 1 브레드보드(일반) × 1 점퍼 와이어(일반) × 1 이 프로젝트 정보 여러분, 안녕하세요. 스마트폰에는 다양한 유형의 센서가 있습니다. 이들은 다양한 유형의 애플리케이션에서 사용됩니다. 그러나 때로는 스마트폰에 추가 센서를 추가해야 합니다. 이를 위해 Arduino/Micro 컨
이 Arduino Tutorial에서는 MIT App Inventor 온라인 응용 프로그램을 사용하여 Arduino를 제어하기 위한 맞춤형 Android 응용 프로그램을 구축하는 방법을 배웁니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 이 자습서에는 두 가지 예가 있습니다. 첫 번째는 간단한 LED를 제어하는 것이고 두 번째는 스마트폰을 이용하여 Stepper Motor를 제어하는 것이다. 이전 튜토리얼에서 우리는 이미 HC-05 블루투스 모듈을 사용하여 Arduino 보드와 스마트폰 사이