

제조공정

산업 제조
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
모스 부호
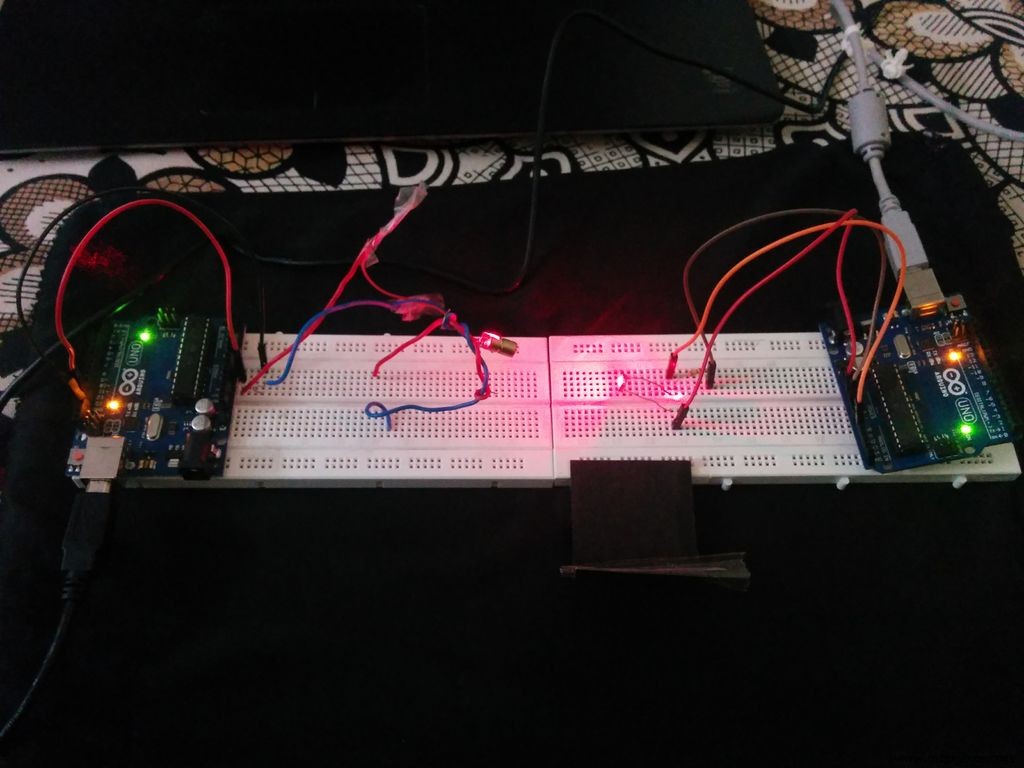
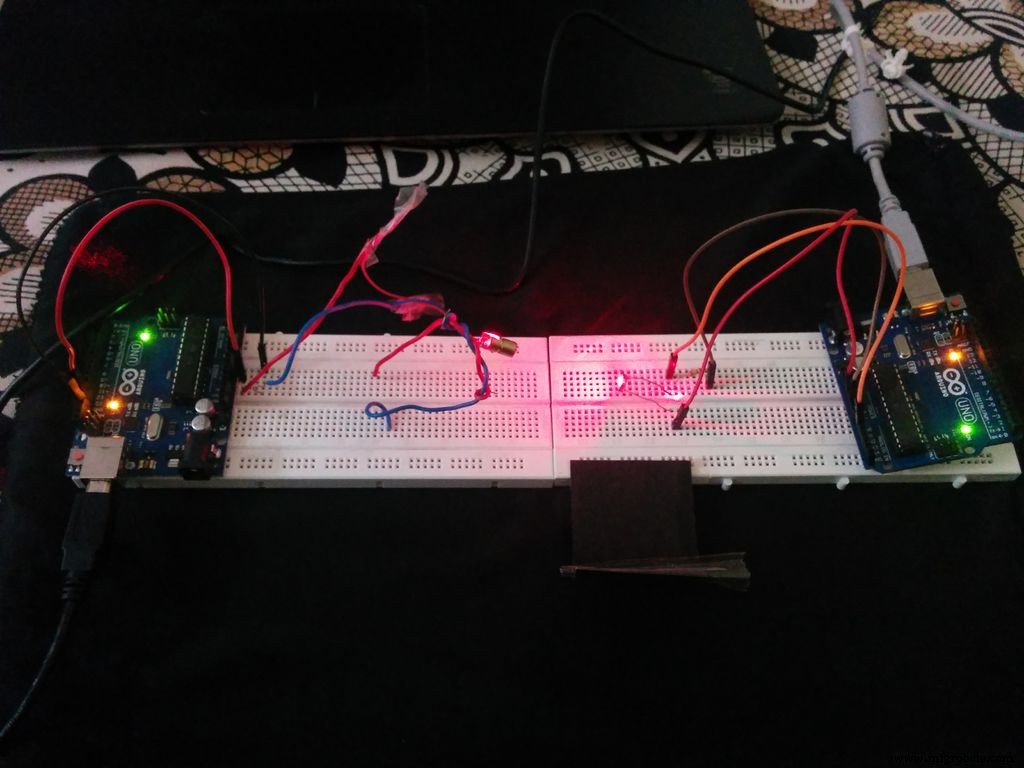
모스 부호는 영숫자 기호(예:알파벳 및 숫자)를 점과 대시로 변환하는 것을 의미합니다. 각 기호에는 고유한 점과 대시의 배열이 다릅니다. 모스 부호는 비밀 데이터 또는 코딩된 데이터를 보내는 데 사용됩니다. 이 프로젝트에서는 모스 부호 통신의 송신기와 수신기 섹션을 만들었습니다. 다른 모스 부호 통신 프로젝트에서 이 프로젝트의 고유성은 수신기 섹션의 알고리즘이 다른 알고리즘보다 정말 간단하다는 것입니다.
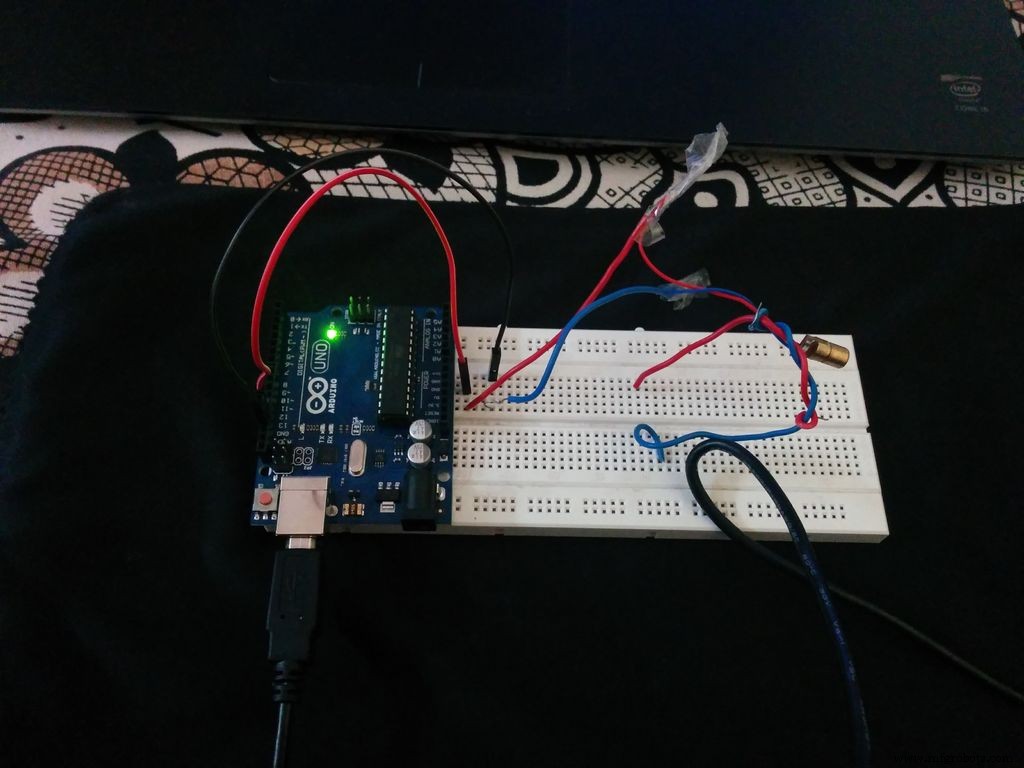
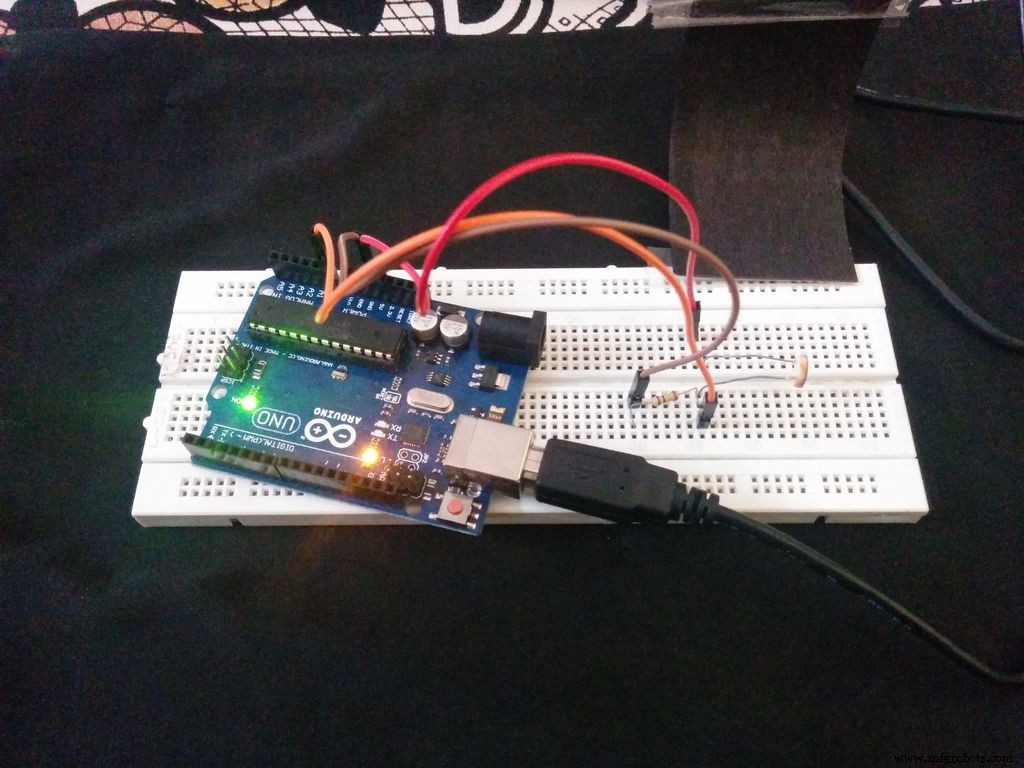
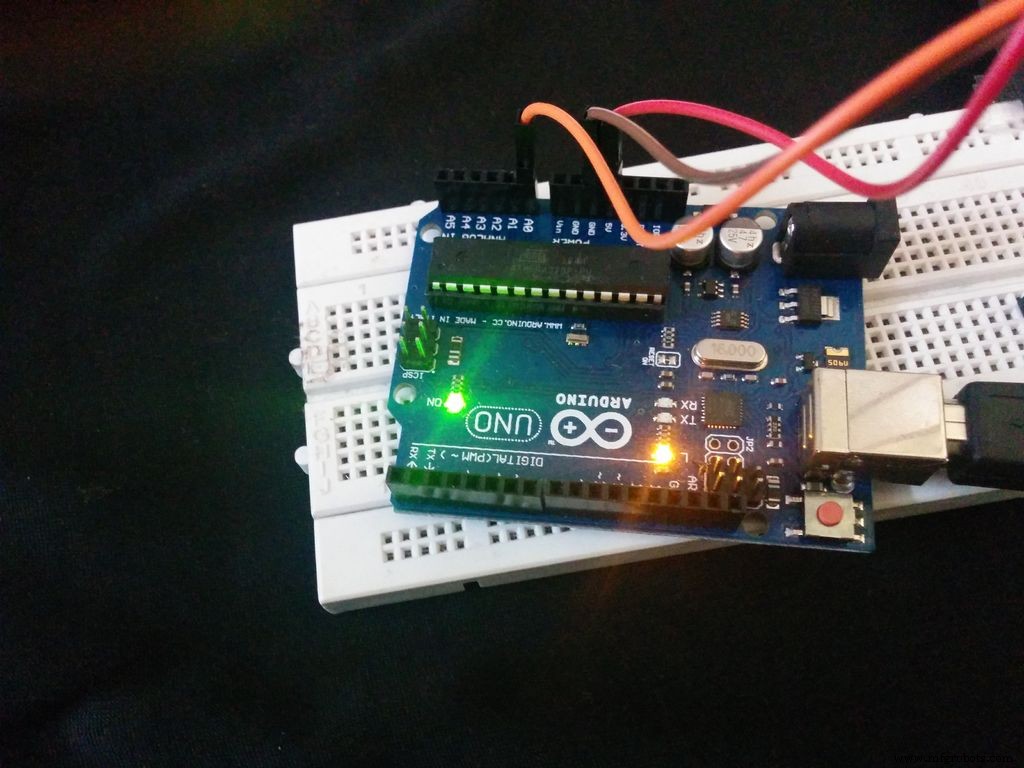
1단계:송신기 섹션
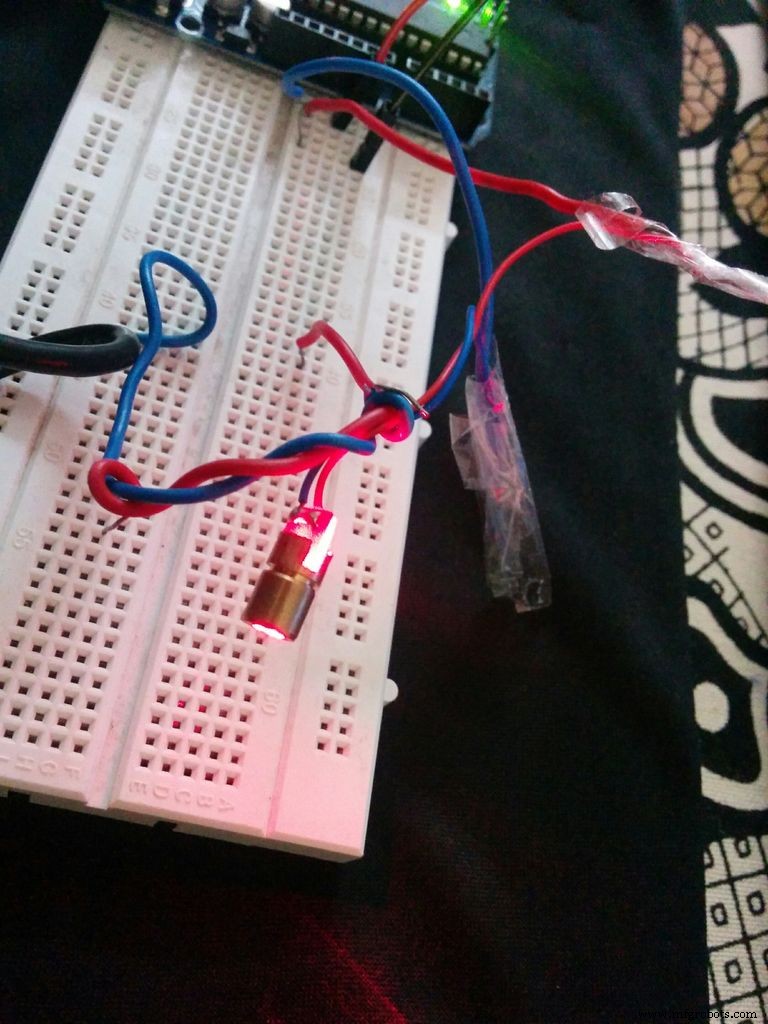
송신기 섹션은 LASER를 통해 입력 데이터를 보내는 데 사용됩니다.
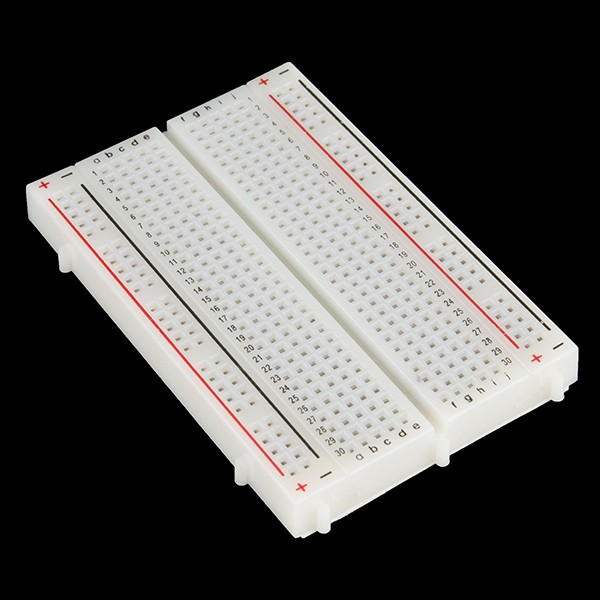
필요한 하드웨어 :- <울>
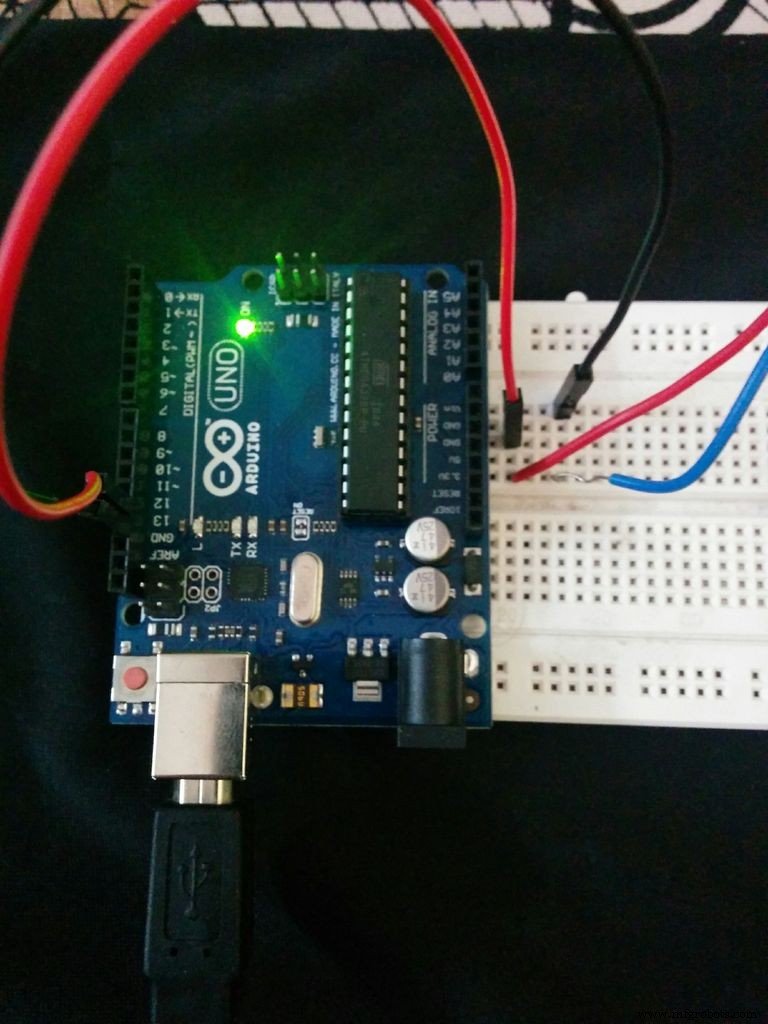
연결:-
레이저의 양극 핀을 Arduino의 디지털 입력의 13번째 핀에 연결합니다(코드에 프로그래밍된 대로). LASER의 GND와 Arduino의 GND를 연결합니다.
프로그램:-
코드의 알고리즘은 다음과 같습니다:-
<울>
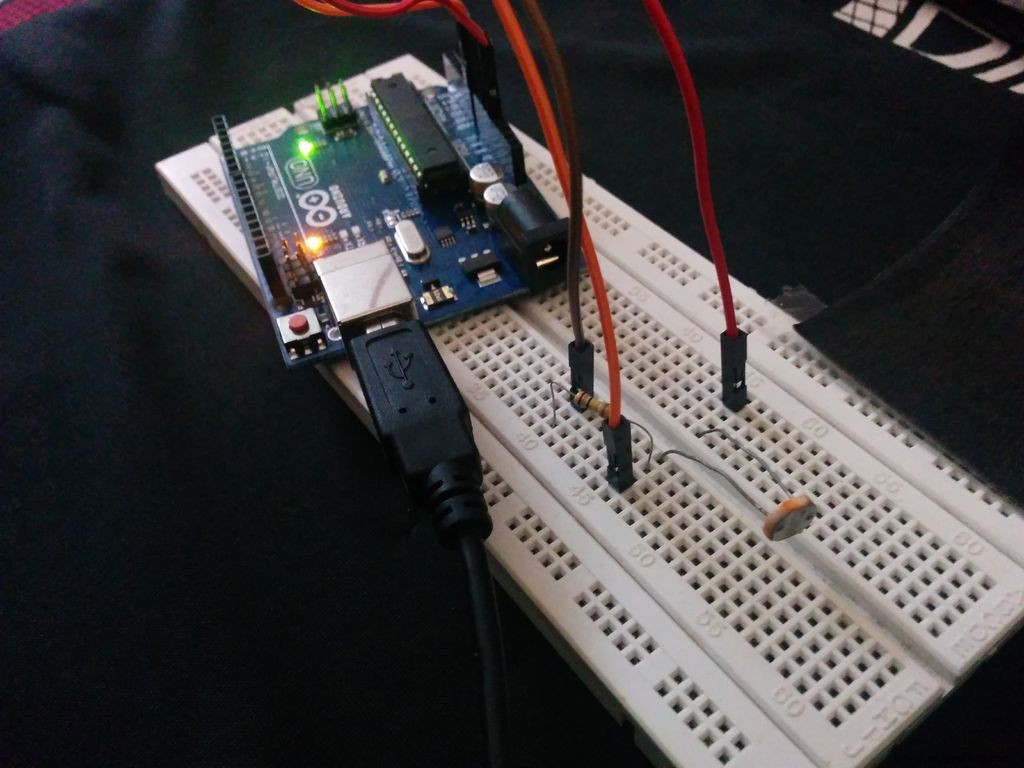
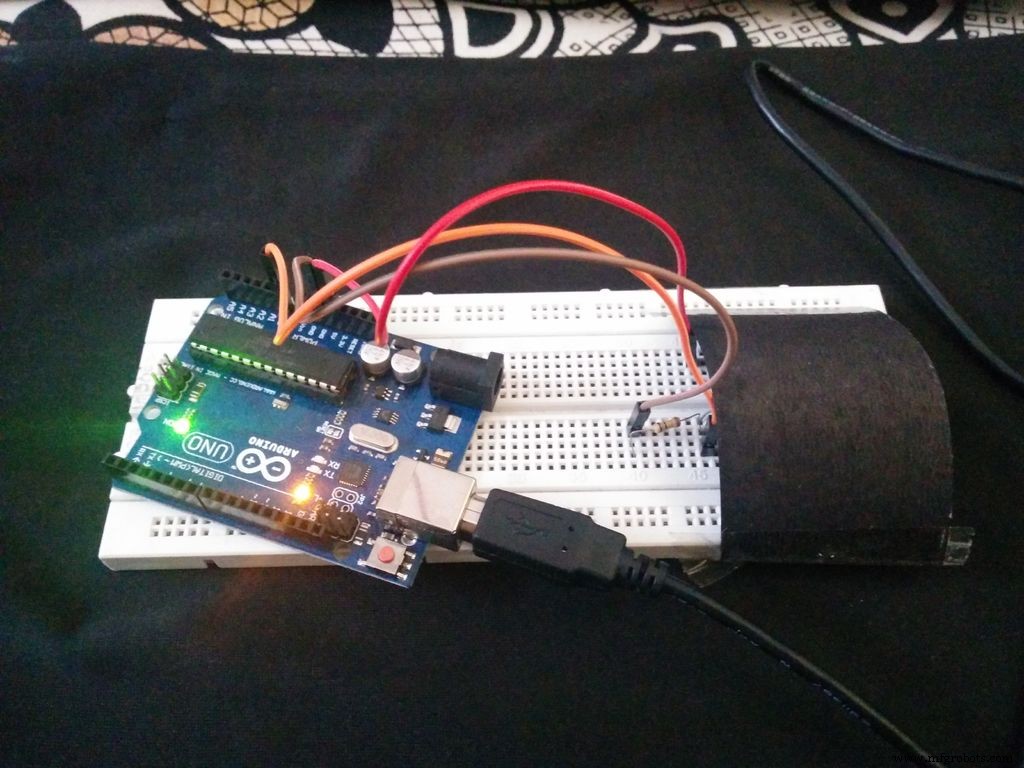
2단계:수신자 섹션
트랜스미터에서 전송된 코딩된 데이터를 수신하여 처리한 후 시리얼 모니터에 표시합니다.
필요한 하드웨어:- <울>
연결:-
5V의 Arduino 전원으로 LDR의 한쪽 끝을 연결합니다. LDR의 다른 쪽 끝을 10K 옴 저항과 아날로그 입력 A0에 연결합니다. 저항의 다른 쪽 끝을 Arduino의 GND에 연결합니다.
프로그램:-
수신기 섹션에서 사용되는 알고리즘은 인터넷에서 사용할 수 있는 다른 알고리즘보다 가장 쉬운 알고리즘입니다. 이 알고리즘은 관찰로 가득 차 있습니다.
<울>
제한 사항:-
코드에 첨부된 프로그램은 특정 문자를 인쇄하는 데 사용됩니다. 조합을 사용하여 코드를 더욱 향상시키고 모든 문자 집합을 표시할 수 있습니다. 코드의 주요 목적은 알고리즘과 작업을 이해하도록 하는 것입니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">int led13 =13; // 출력 13에서 led를 깜박임/* 모스 부호의 속도를 설정합니다. 비율 코드 요소는 다음과 같습니다. 대시 길이 =도트 길이 x 3 요소 사이의 일시 중지 =도트 길이 */int dotLen =200; // 모스 부호의 길이 'dot'int dashLen =dotLen * 3; // 모스 부호의 길이 'dash'int elemPause =dotLen;// 문자의 요소 사이의 멈춤 길이 Spaces =dotLen * 3; // 문자 사이의 공백 길이int wordPause =dotLen * 7; // 단어 사이의 멈춤 시간의 길이void setup() { // 디지털 핀을 LED 조명의 출력으로 초기화합니다. 핀모드(LED13, 출력); }// 모스 부호로 출력하려는 문자/단어의 루프 생성(코드 상단의 문자열에 정의됨)void loop(){ // 문자열을 반복하고 끝이 될 때까지 각 문자를 한 번에 하나씩 가져옵니다. Reached for (int i =0; i CODE-2 - 수신기용Arduino
<사전>int sensorPin =0; // ldrint에 대한 입력 핀을 선택합니다. sensorValue =0; // sensorint에서 오는 값을 저장할 변수 a, f; // flagsvoid setup() {Serial.begin(9600); //통신용 직렬 포트 설정}void loop() {sensorValue =analogRead(sensorPin); // 센서에서 값 읽기 //Serial.println(sensorValue);if(sensorValue>1000)// 점과 대시의 수 계산{ for(int i=0;i<=13;i++) { sensorValue=아날로그 읽기(센서 핀); if(센서값>1000) { a++; //문자의 점과 대시 개수 계산 delay(200); } 그렇지 않으면 { f++; // 점과 대시의 공백 수 계산 delay(200); } }}//Serial.print("a="+a);//Serial.println("f="+f);//Serial.println();/* * 점, 대시 및 공백 */if(a==4 &&f==10){ Serial.print("a");}if(a==6 &&f==8){ Serial.print("b");}if (a==8 &&f==6){ Serial.print("c"); }if(a==1 &&f==13){ Serial.print("e");}if(a==2 &&f==12){ Serial.print("i");}if(a ==10 &&f==4){ Serial.print("j");}if(a==7 &&f==7){ Serial.print("g");}if(a==9 &&f==5){ Serial.print("o");}if(a==3 &&f==11){ Serial.print("s");}f=a=0;delay(200); } 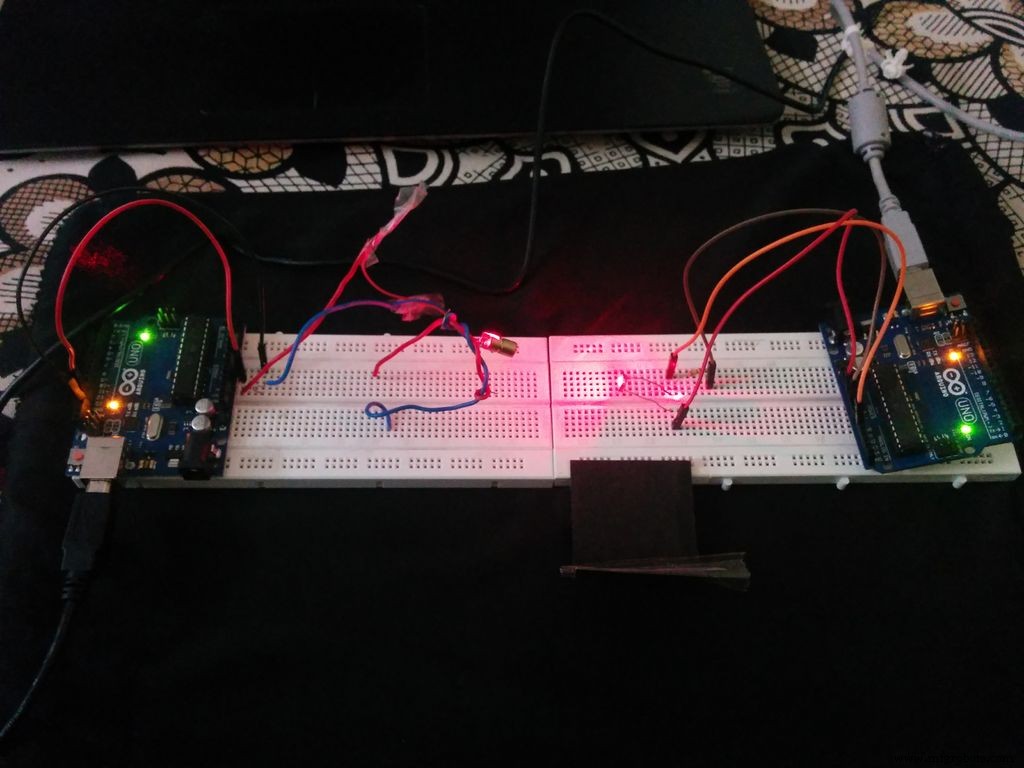
제조공정
원격으로 정보를 주고 받기 위해 통신 모듈이 필요하십니까? HC-12 해보셨나요? 쉽게 구성하고 사용할 수 있는 훌륭한 직렬 데이터 모듈입니다. 오늘의 기사에서는 HC-12, 속성, 설정 및 사용 방법을 살펴봅니다. HC-12란 무엇입니까? HC-12는 직렬 데이터를 송수신하는 데 사용할 수 있는 100mW 무선 다중 채널 내장형 통신 모듈입니다. 100개의 채널이 있으며 최대 1000미터까지 전송할 수 있습니다. HC-12 기술 속성 HC-12의 작동 주파수는 433.4~473.0MHz입니다. 둘째, 공급 전압은 3.
로봇식 레이저 절단은 보다 전통적인 형태의 레이저 절단 자동화에 비해 몇 가지 유용한 이점을 제공합니다. 하지만 이것이 최선의 방법인지 확신할 수 없을 수도 있습니다. 레이저 절단기 대신 로봇을 사용하는 이유는 무엇입니까? 기존 기계를 선택하면 어떤 단점이 있습니까? 로봇 레이저 절단의 새로운 시대는 이미 도래했습니다. 다음은 귀하의 비즈니스에 적합한 선택인지 결정하는 데 필요한 주요 정보입니다. 기존 접근 방식:레이저 절단기 자동화된 레이저 절단은 새로운 것이 아닙니다. 대부분의 기계 공장과 많은 제조 시설에는 이미 평판