

제조공정

산업 제조
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 30 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 |
 |
| |||
 |
|
 |
|
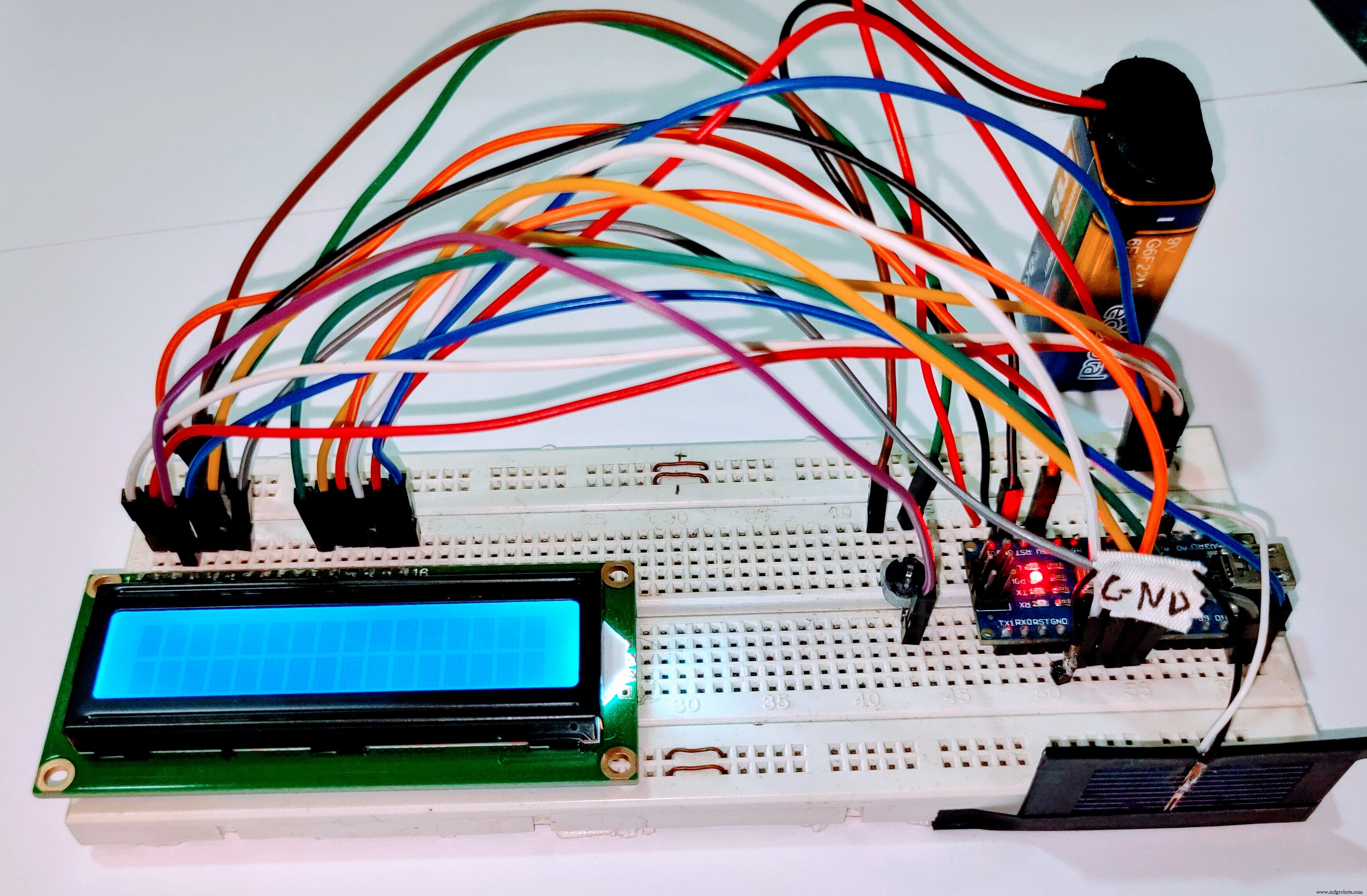
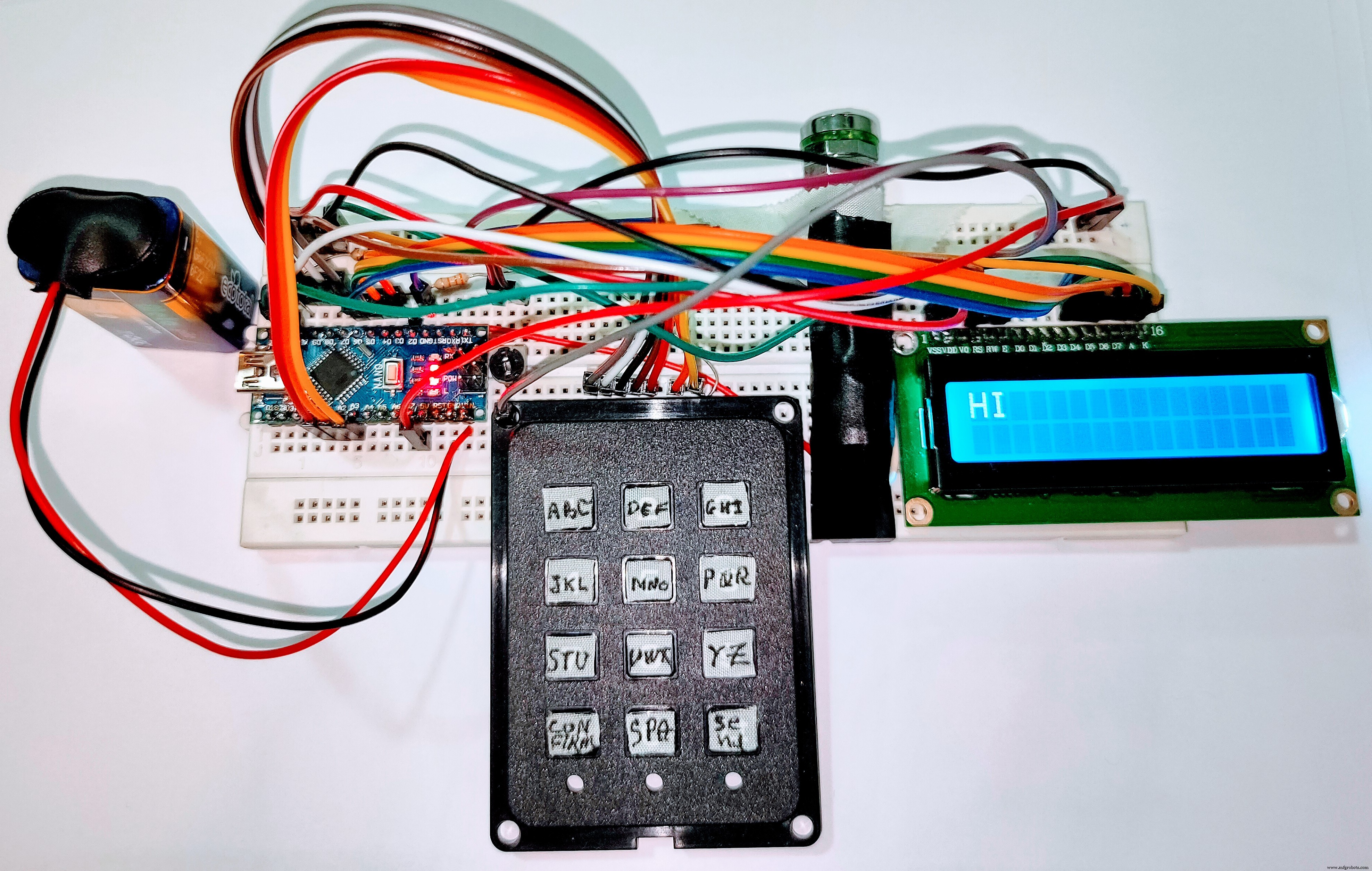
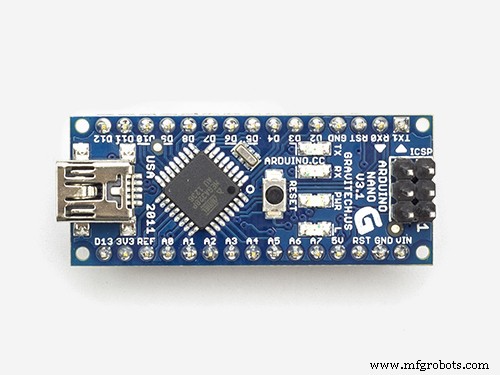
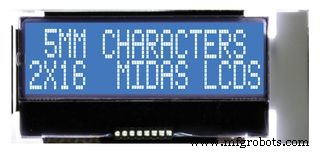
이 프로젝트는 키패드와 LCD를 사용하여 레이저를 통해 텍스트를 보내는 데 사용할 수 있는 송신기와 수신기의 두 부분으로 구성되어 있습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">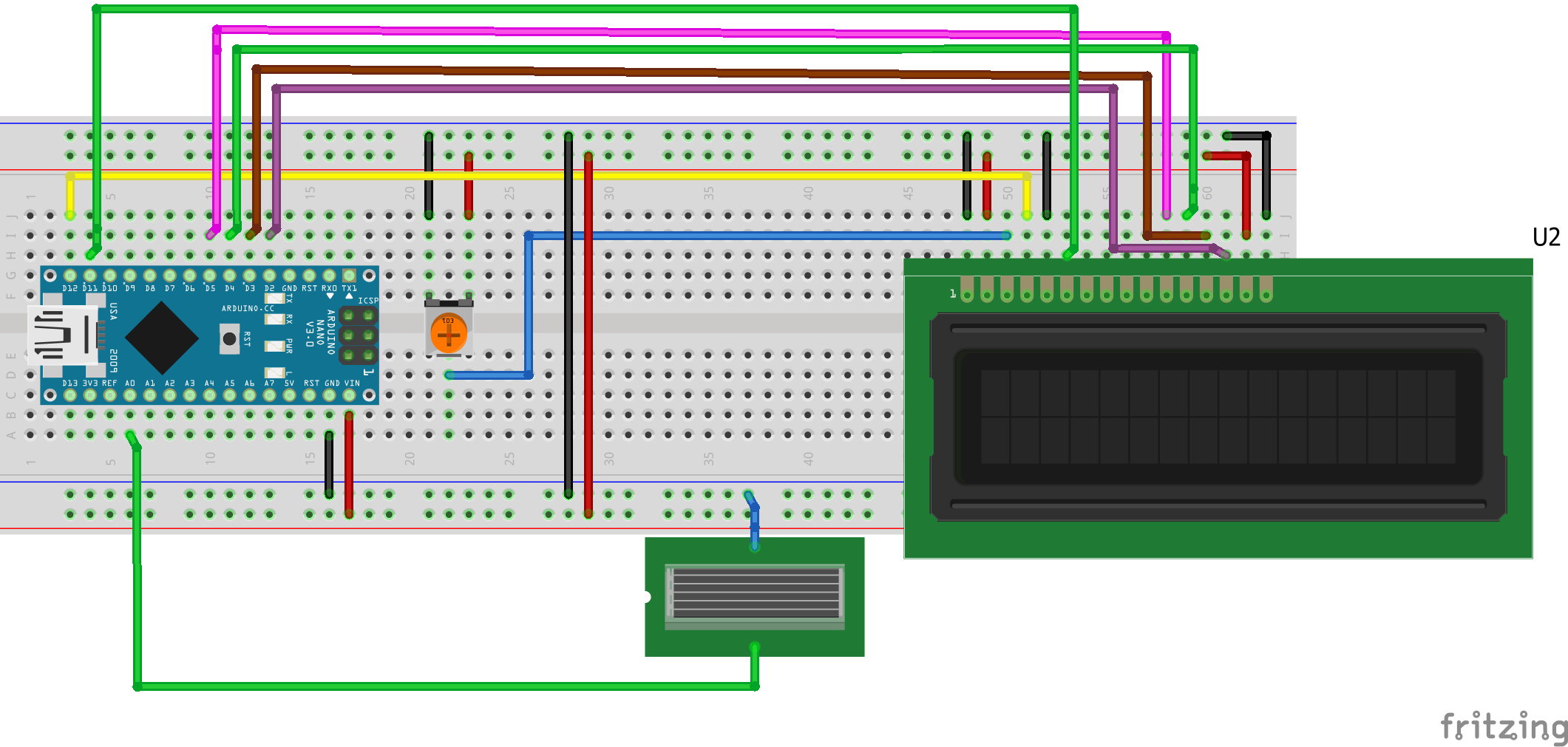 사용자는 눌러야 하는 각 문자를 입력한 후 키패드와 LCD를 사용하여 보낼 내용을 선택해야 합니다. 확인 버튼을 누르고 마지막으로 보내기 버튼을 누릅니다.
사용자는 눌러야 하는 각 문자를 입력한 후 키패드와 LCD를 사용하여 보낼 내용을 선택해야 합니다. 확인 버튼을 누르고 마지막으로 보내기 버튼을 누릅니다. 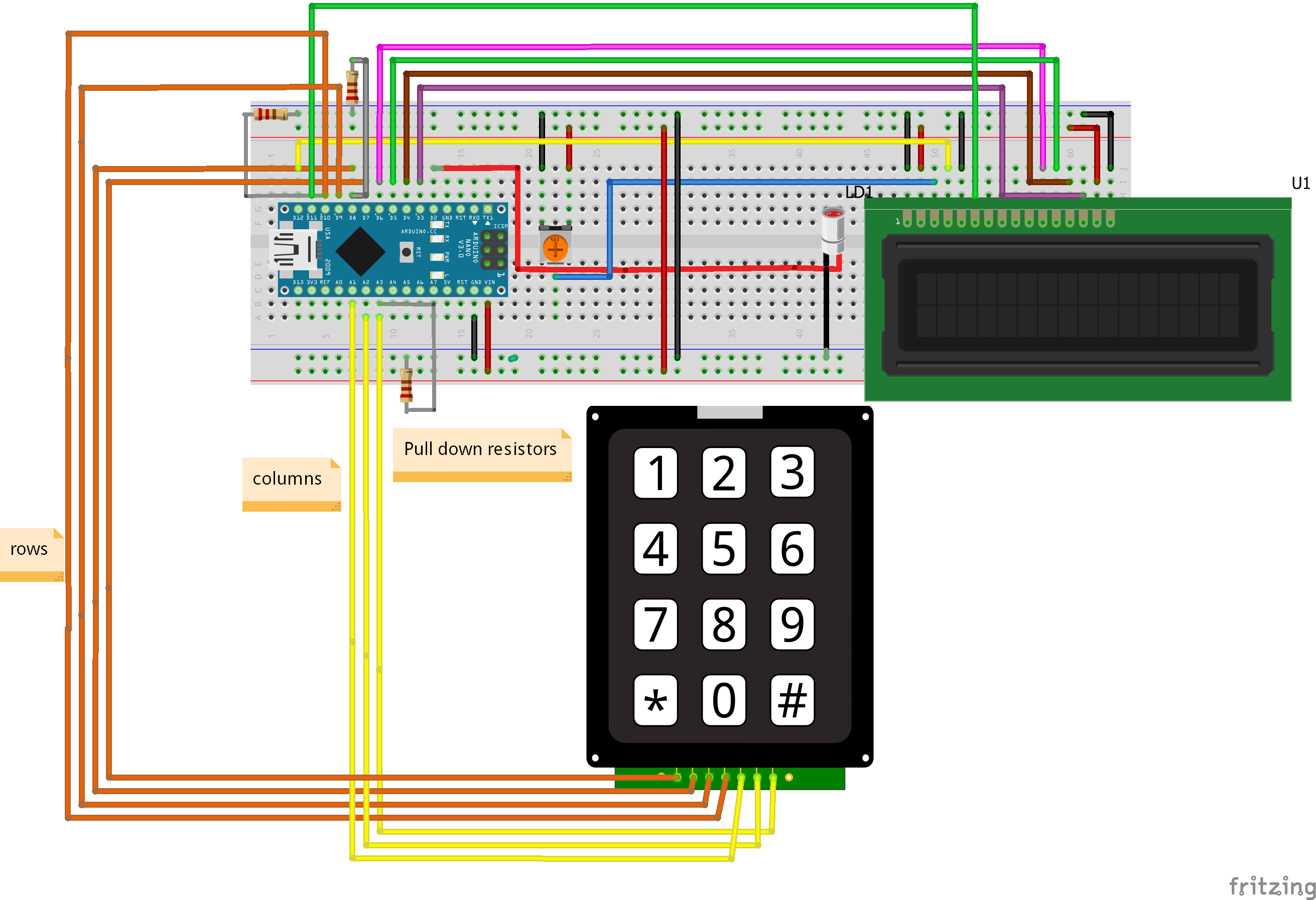
제조공정
구성품 및 소모품 초음파 센서 - HC-SR04(일반) × 2 Arduino Nano R3 × 1 포토 저항기 × 1 Maxim 통합 8x8 LED 매트릭스 MAX7219 × 2 납땜 브레드보드 절반 크기 × 1 점퍼 와이어(일반) × 1 저항 330옴 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 저는 8x8 매트릭스 LED와
전력 전송 전력 송전은 발전소에서 생산된 전력을 대량으로 대량으로 소비자가 사용할 수 있도록 장거리로 운송하는 과정입니다. 전력은 발전소에서 송전선로를 통해 최종 소비자에게 전달됩니다. 전송선로가 서로 연결되면 전송망이 됩니다. 발전소 및 변전소와 함께 이 전송 네트워크를 송전 그리드 또는 간단히 그리드라고 합니다. 대표적인 송전망은 그림 1과 같다. 국가 차원에서 상호 연결된 송전망을 국가망이라고 한다. 에너지는 일반적으로 3상 교류(AC)로 그리드 내에서 전송됩니다. 많은 양의 전력이 투입되고 전기의 특성으로 인해