

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |


설명
세계 최초의 독립형 Arduino 기반 망원경 제어 Goto.
사용 가능한 모든 오픈 소스 망원경 제어는 많은 전력을 소비하는 Raspberry Pi를 사용하거나 Arduino를 컴퓨터, 스마트폰 또는 태블릿의 확장으로 사용합니다. rDUINOScope는 아마추어 천문학자들이 밤하늘을 즐길 수 있게 해주는 최초의 Arduino 기반 독립형 장치입니다.
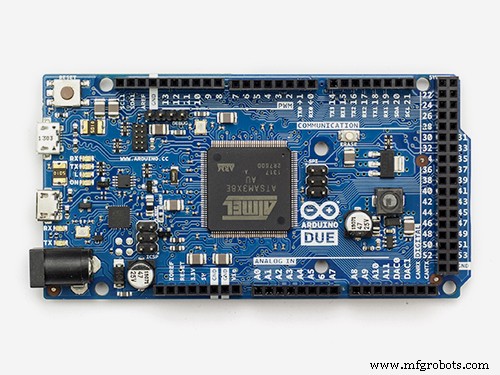
초기 아이디어는 SkyWatcher, Orion, Vixen 등에서 제조한 것과 같은 상업적으로 이용 가능한 GOTO 제품의 저렴하고 구축하기 쉬운 대안을 만드는 것이었습니다. 따라서 하드웨어 아키텍처는 Arduino DUE 보드와 시중에서 구할 수 있는 저렴한 센서를 기반으로 합니다. 제작 방법에 대한 안내 및 사용자 가이드 프로젝트 웹 사이트에서 만들었습니다. 시스템의 중심에는 기능을 추가하기 위해 지속적으로 개발되는 소프트웨어가 탑재된 Arduino DUE 보드가 있습니다.
스텔라리움이 있는 rDUINOScope:
세부정보
rDUINOScope 오픈 소스인 Arduino Due 기반 망원경 제어 시스템(GOTO)입니다. 독립 실행형 시스템으로 설계된 rDUINOScope는 멋진 전망을 작동하고 제공하기 위해 PC, 태블릿 또는 휴대폰이나 인터넷 연결이 필요하지 않습니다!
기본적으로 최고의 250개의 별 천체(메시에 및 숨겨진 보물 목록)와 200개의 별이 있는 데이터베이스가 있습니다. , 하늘에서 자신의 위치를 계산하고 망원경을 가리킵니다. 구현된 정렬 절차를 통해 선택한 개체로 이동할 때 "항상 접안경" 경험을 할 수 있으며 개체가 접안경에 있으면 시스템은 계속 추적합니다.
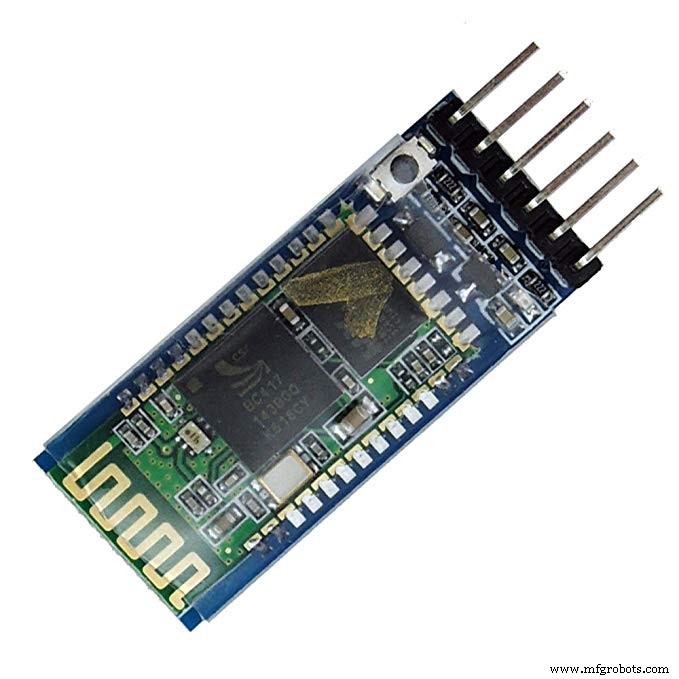
그러나 전자 장치를 활용하려는 경우 #rDUINOScope는 Bluetooth 통신을 활용합니다 (무선 설정) 모든 전자 장치와 연결하고 MEADE LX200 통신 프로토콜을 기반으로 명령을 수락합니다.
이 시스템은 모든 유형의 스테퍼 모터와 함께 작동하며 DIY 마운트 또는 SkyWatcher, MEADE, Orion, Vixen 등과 같은 상용 제품에 모두 장착할 수 있습니다.
기능:
rDUINO SCOPE 내부에는 무엇이 있습니까?
rDUINOScope Github
구성 지침
1단계 준비
시작하기 전에 소프트웨어를 변경하고 사용자 정의할 수 있도록 소프트웨어 작동 방식을 이해하는 것이 중요합니다. 결국 이것은 이 프로젝트의 가장 중요한 강점 중 하나입니다!
이 부분을 이해하려면 "라이브러리" 파일과 함께 프로젝트 파일에서 코드를 다운로드하거나 다음에서 전체 패키지를 다운로드해야 합니다. http://rduinoscope.co.nf/downloads.php <엠>. 참조된 모든 행 번호는 V2.1의 코드를 따릅니다. 보이아나 EQ
Arduino 코드가 어떻게 작동하는지 알아야 합니다. 일반적으로 Arduino 프로그램에는 2개의 섹션이 있습니다. SETUP(); 및 LOOP(); SETUP()은 프로그램 시작 시 실행되며 기본적으로 시스템을 활용합니다. LOOP()는 초당 여러 번 실행되는 상수 루프 함수입니다. 따라서 화면, 터치 입력 등이 있고 LOOP()로 인해 화면이 깜박이지 않도록 하려면 사용자가 무엇을 하기를 기대하는지 Arduino에 알리는 메커니즘을 발명해야 합니다. 따라서 LOOP() 섹션에서 "Consider Touch.. or Consider Time..." 등의 코드만 있는 아주 작은 부분을 볼 수 있습니다. 나머지 활동은 우리가 변경할 수 있는 해당 함수 내에서 발생합니다. 화면이 초당 여러 번 새로 고쳐지지 않도록 프로그램의 흐름.
계산 :항성 물체의 위치를 계산하는 방법에 대해 인터넷에서 찾은 일부 정보를 사용했습니다. 다음 링크에서 수집한 대부분의 정보:http://www.stargazing.net/kepler/altaz.html - 시각(HA), 위치, 현재 시간 및 항성 물체 RA를 계산하는 데 필요한 공식 및 접근 방식을 설명합니다. 그리고 12월.
HA /row 678:void computeLST_HA() /를 계산하는 코드를 생성한 후 , 이 페이지를 사용하여 제대로 작동하는지 확인했습니다. http://www.jgiesen.de/astro/astroJS/siderealClock/ , 그리고 나중에 Messier Objects가 있는 DB를 추가할 때 Stellarium(http:// www.stellarium.org/) 동일한 수표를 신청하십시오.
내가 찾은 주요 문제는 공식 자체가 아니라 Arduino가 변수 유형, 특히 계산의 정밀도를 처리하는 방식이었습니다.
이제 주어진 물체에 대해 HA 및 DEC를 계산했으면 마운트 포인트를 망원경으로 만들고 싶습니다. 그렇게 하려면 모터가 얼마나 정확하게 회전해야 하는지 어떻게든 알아야 합니다. 이 작업에 성공하려면 웜 대 기어 비율이 무엇인지 알아야 합니다. 즉, 기어가 360°를 만들기 위해 웜이 몇 번 회전해야 하는지 알아야 합니다. 나는 Vixen Super Polaris를 가지고 있으며 인터넷에서 빠른 검색을 통해 RA 및 DEC 샤프트 모두에 144개의 톱니 기어를 사용하는 것으로 나타났습니다. 간단한 Excel 파일(*.XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx)을 생성하여 HA 및 DEC를 계산한 후 모터가 얼마나 회전해야 하는지, 그리고 얼마나 자주 " 지구 회전을 보상하기 위한 모터.
Gears_Stepper_Calculation.xlsxXLS에서 사용한 것과 동일한 수학적 모델이 코드에서도 구현되므로 코드 시작 부분(34~37행)에서 마운트 값을 대체하기만 하면 됩니다.
// 여기에 마운트, 기어 및 드라이브 정보가 표시됩니다.// ... HourAngle 대 microSteps 비율을 계산하는 데 사용됩니다.// SET-UP// ------ ---------------------------------------// 주의:RA와 DEC는 같은 장비를 사용합니다. 비율(제 경우에는 144개 치아)!//--------------------------------------- -------int WORM =144;int REDUCTOR =4; // 1:4 기어 감속int DRIVE_STP =200; // 스테퍼 드라이브에는 회전당 200개의 단계가 있습니다.int MICROSteps =16; // 항성 운전을 위해 1/16 마이크로스텝 모드를 사용하겠습니다. 최저 속도도 결정합니다. 이제 비율을 계산하고 나면 코드에서 망원경이 해당 좌표를 가리키도록 모터를 얼마나 돌려야 하고 마운트가 물체를 추적할 수 있도록 클럭 속도가 얼마인지 알 수 있습니다. 위를 처리하는 함수는 906행과 917행에서 시작합니다.
void Sidereal_rate(){}void cosiderSlewTo(){} 고려사항 :아시다시피 이것은 소비자용 제품이 아닙니다. 이를 통해 필요에 맞게 사용자 정의할 수 있으므로 매우 유연하지만 유연성에는 몇 가지 단점이 있습니다. 할 일 목록에서 제외되지 않도록 이 "고려 사항" 섹션을 포함시켰습니다.
<울>if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); 디지털 쓰기(RA_STP, 높음); 디지털 쓰기(RA_STP,LOW); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); 디지털 쓰기(RA_STP, 높음); 디지털 쓰기(RA_STP,LOW); RA_microSteps -=RA_mode_steps;} 조치: 코드의 다음 부분을 수정합니다. void think_Manual_Moveint xP, int yP ), cosiderSlewTo() 무효 및 Sidereal_rate() 무효
<울>활동 계획: 이제 rDUINO Scope GoTo 시스템을 실제로 구축하기 위한 활동을 계획해야 하는 시점에 도달했습니다. 대략적인 추정은 필요한 모든 것(HW, 도구 및 재료)이 있는 것을 고려할 때 2-3일 안에 시스템을 완료할 수 있어야 한다는 것입니다. 밤에만 일할 수 있고(매일 밤은 아님) 많은 조사를 해야 했기 때문에 완성하는 데 4-5개월 정도 걸렸습니다. 이 모든 것을 종합해보면 다음과 같습니다.
<울>
2단계 자료
이제 프로그램이 기본적으로 어떻게 작동하는지 알고 있으므로 조달을 계획하고 필요한 자료를 확보해야 합니다.
자재 명세서 :제가 사용한 대부분의 재료는 인터넷에서 중국 업체로부터 구입했습니다. 그 중 몇 개는 없지만 GPS, Bluetooth 및 조이스틱과 같은 지연을 피하고 싶었기 때문에 대부분 현지에서 구매하기로 결정했습니다. 대략 $190 USD의 비용이 들었습니다. 이 모든 것을 얻으려면 제조업체에서 그러한 시스템을 구입하는 데 드는 비용에 비해 정말 저렴한 비용입니다. 재료 목록과 가격 및 구입처는 프로젝트 웹사이트(http://rduinoscope.co.nf/rDUINO_step2.html)에서 찾을 수 있지만 목록은 이 웹사이트의 "구성요소" 섹션에서도 볼 수 있습니다. .
더 저렴한 제품을 찾거나 더 빨리 배송할 수 있다면 그렇게 하는 것이 좋습니다.
또한 디자인에 따라 40핀이 필요할 수도 있습니다. TFT용 커넥터가 있는 케이블, 조이스틱을 고정하기 위한 플라스틱 볼트, 상자, 팬 등에 동봉된 Arduino Due를 계속 프로그래밍할 수 있도록 하는 USB 케이블.
집에 그것들이 없다면(저처럼) 땜납 재료, 땜납, 니퍼, 디지털 멀티미터 등도 구입해야 합니다.
필요한 소프트웨어 :rDUINOScope 구축의 한 가지 중요한 부분은 Arduino IDE 및 모든 관련 소프트웨어(드라이버, 보드 정의 및 라이브러리)를 다운로드하여 설치하는 것입니다. 컴퓨터에 필요한 설치를 위해 아래 목록을 따르십시오:
<울>이제 Arduino를 컴퓨터에 연결한 후 코드를 컴파일하고 Arduino Due 보드에 로드할 수 있어야 합니다.
참고: Arduino IDE의 작동 방식과 Arduino를 프로그래밍하기 위해 수행해야 하는 작업을 모르는 경우 웹 사이트 및 자습서를 참조하십시오. https://www.arduino.cc/en/Tutorial/HomePage
3단계 조립
자세한 지침은 프로젝트 웹사이트를 참조하십시오. http://rduinoscope.co.nf/rDUINO_step3.html
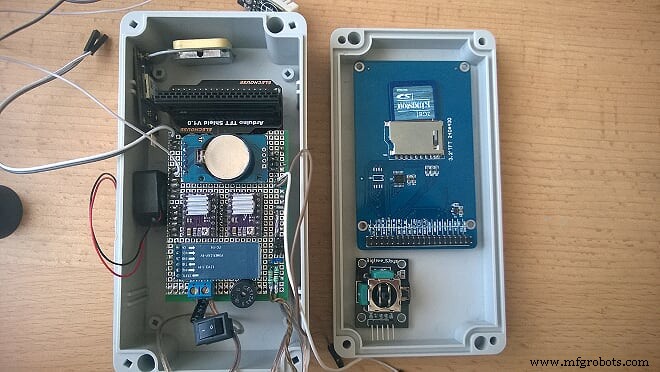
이제 Shield 보드를 만들 차례입니다. Shield 보드는 ArduinoDUE 보드 위에 쌓는 핀아웃이 있는 보드입니다. 일부 구성 요소는 해당 보드에 있어야 하고 일부는 대신 인클로저 상자에 더 잘 배치됩니다. 내 분할은 다음과 같습니다.
<울>ARDUINO DUE 보드에 구성 요소를 연결하는 방법:
컴포넌트 .... 하드웨어 핀 .... 아두이노 핀
GPS
<울>RTC
<울>블루투스
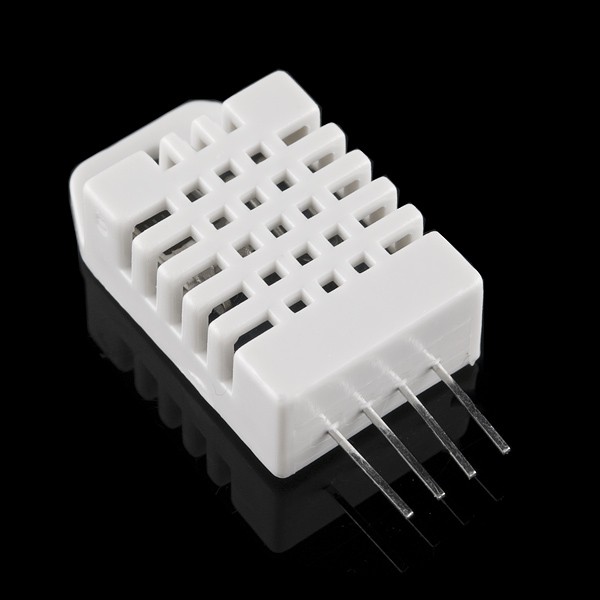
<울>DHT
<울>스피커
<울>PS2
<울>적각 DRV8825
<울>오른쪽 상승 DRV8825
<울>TFT 화면
<울>맞아요... 이제 실드 보드를 조립할 준비가 되었습니다. 프로토타이핑 PCB를 얻고 절단 방법을 평가하여 모든 구성 요소를 고정하여 배선을 위한 공간을 확보하고 핀아웃을 Arduino 위에 쌓을 수 있는 방식으로 납땜하도록 합니다. 아두이노에서 사용하는 모든 핀을 납땜하여 쉴드 보드의 부품이나 이 쉴드 보드의 커넥터에 연결하여 상자 자체에 있는 부품도 연결할 수 있도록 해야 합니다.
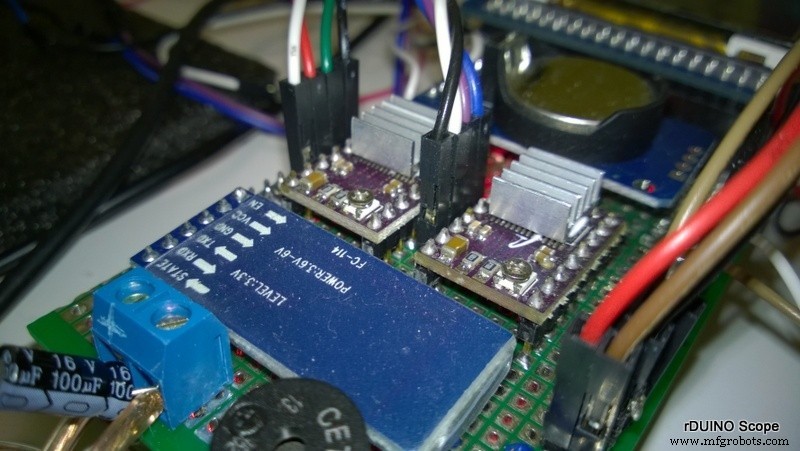
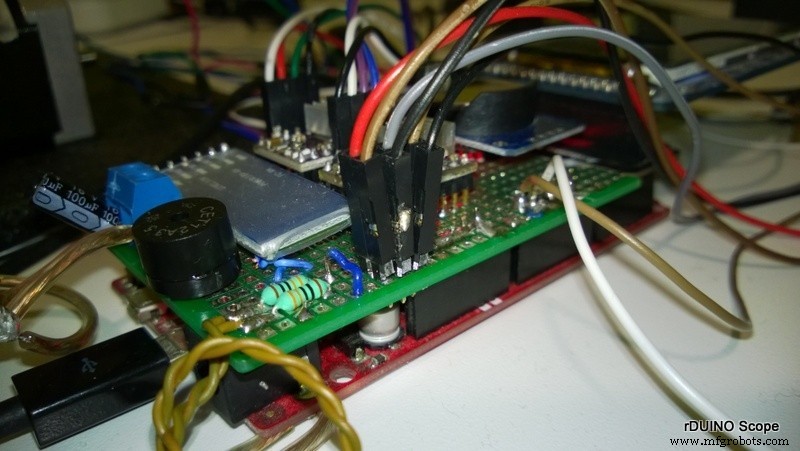
아래에 과정 사진 몇 장을 포함합니다.
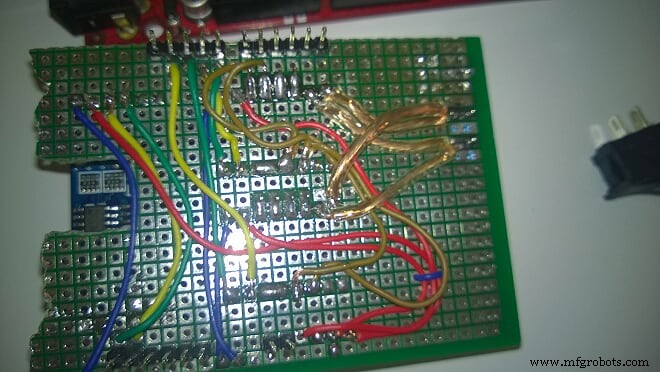

그런 다음 보드를 연결하고 실드를 테스트했습니다! 작동하지 않습니다! :( 배선을 확인해보니 2개의 연결 사이에 브리지가 생성되어 수리해야 했습니다. 이 순간부터 잘못된 배선으로 Arduino 또는 다른 것을 태우지 않은 것이 정말 운이 좋았기 때문에 모든 납땜에 문제가 있는지 확인하기 시작했습니다. 주의:모든 연결을 확인하십시오! 중요하므로 DRV8825 및 모터 드라이브에 대한 다음 배선도를 따라야 합니다.
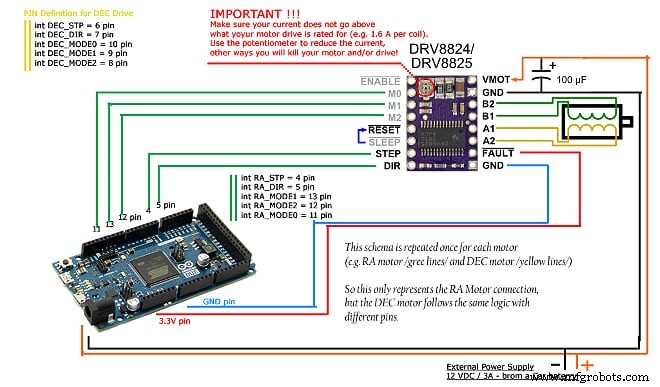
적절한 전원 어댑터(12V, 1.6A)를 사용하고 전원이 켜지기 전에 모터 드라이브를 연결했는지 확인하십시오! 주의:드라이버를 태울 수 있으므로 DRV8825가 부하 상태일 때 모터 드라이브를 연결하지 마십시오!
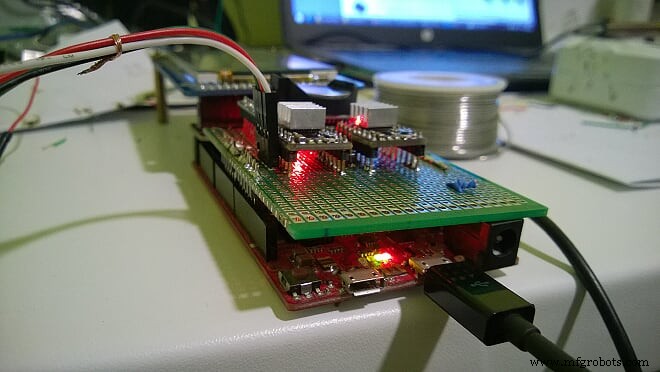
이제 모든 구성 요소가 제자리에 납땜되었으므로 모터 드라이브도 연결하고 소프트웨어를 Arduino 보드에 로드하고 전체 설정을 테스트하는 것이 좋습니다. 이 시점에서 결함 없이 작동해야 합니다.
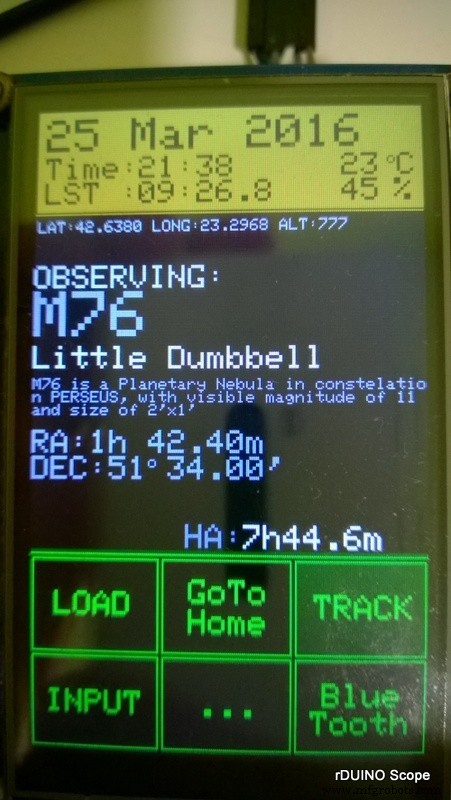
이제 소프트웨어를 가지고 놀고 사용자 인터페이스를 알 수 있을 것입니다. 인터페이스를 돕기 위해 프로젝트 웹사이트에 USER'S GUIDE 페이지를 만들었습니다. http://rduinoscope.co.nf/guide.html
설정은 다음과 같아야 합니다.

4단계 함께 포장
실드 보드가 준비되면 상자를 들고 나머지 구성 요소를 모두 배치하고 구멍을 뚫어야 할 위치와 모양과 크기를 계획합니다. 구멍을 자르는 가장 좋은 방법은 작은 주머니칼을 사용하는 것입니다(적어도 저에게는). 그것이 둥근 구멍인지 사각형 구멍인지는 실제로 중요하지 않습니다. 작고 날카로운 칼로 쉽게 조각 할 수 있습니다.
유일한 예외는 길고 고르고 정사각형의 구멍이 정말로 필요한 화면의 경우입니다. 나는 도움을 요청했고 아버지는 절단 기계에서 그것을 하셨습니다.
레이아웃에 만족하고 가능하다고 생각되면 구멍을 자르기 시작합니다. 그것은 긴 과정이고 약간의 혼란을 야기하지만 2-3시간 이상 걸리지 않아야 합니다. 12V 전원 공급 장치 커넥터, RA 및 DEC 모터 커넥터와 같이 원형 구멍을 뚫어야 할 때 가끔 드릴을 사용했습니다.
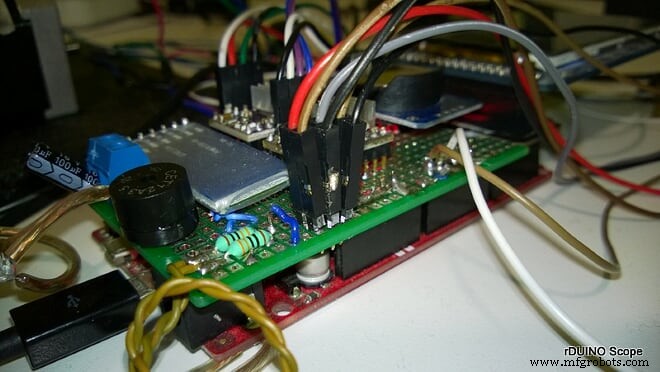
핫 글루 건을 준비하고 아래와 같이 상자에 구성 요소를 핫 글루로 붙이기 시작합니다.




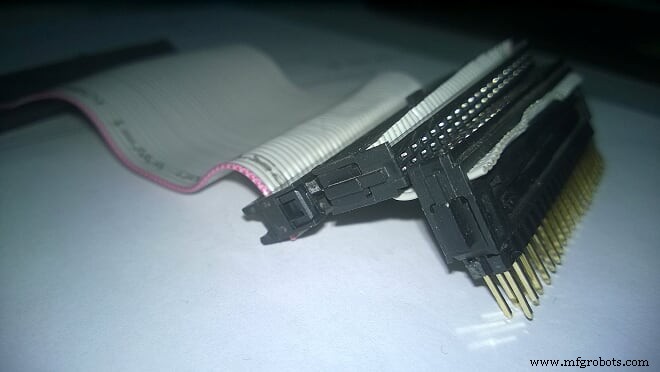
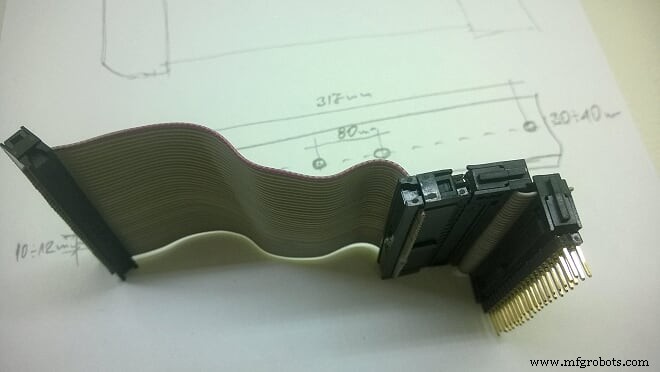
이제 상자 전면에 있는 구성 요소를 제외하고 모두 연결되고 상자에 넣습니다. 나는 거기에 TFT 스크린, PS2 조이스틱 및 주야간 모드 스위치를 놓기로 결정했습니다. TFT 화면에 도착했을 때 암수 커넥터가 있는 간단한 리본 케이블 연결을 만들어 화면에 연결했습니다. 그러나 이것은 작동하지 않았습니다! 그 이유는 핀이 미러링되어 TFT 화면이 더 이상 작동하지 않기 때문입니다. 따라서 나는 문제를 해결하기 위해 몇 가지 복잡한 2D에서 3D로의 변환을 수행하고 리본 케이블에 있는 커넥터를 해결하기로 결정했습니다.
긴 이야기, 짧게: 로켓 과학은 아니지만 해결책을 찾을 때까지 힘든 시간을 보냈습니다. 추악한 솔루션이지만 효과가 있었고 1년 후에도 여전히 작동합니다. 아래에서 내가 의미하는 바를 알 수 있습니다.
기본적으로 여기에 표시되는 내용은 다음과 같습니다.

 <울>
<울> 그것은 매력처럼 작동했고 상자를 완성할 수 있었습니다!






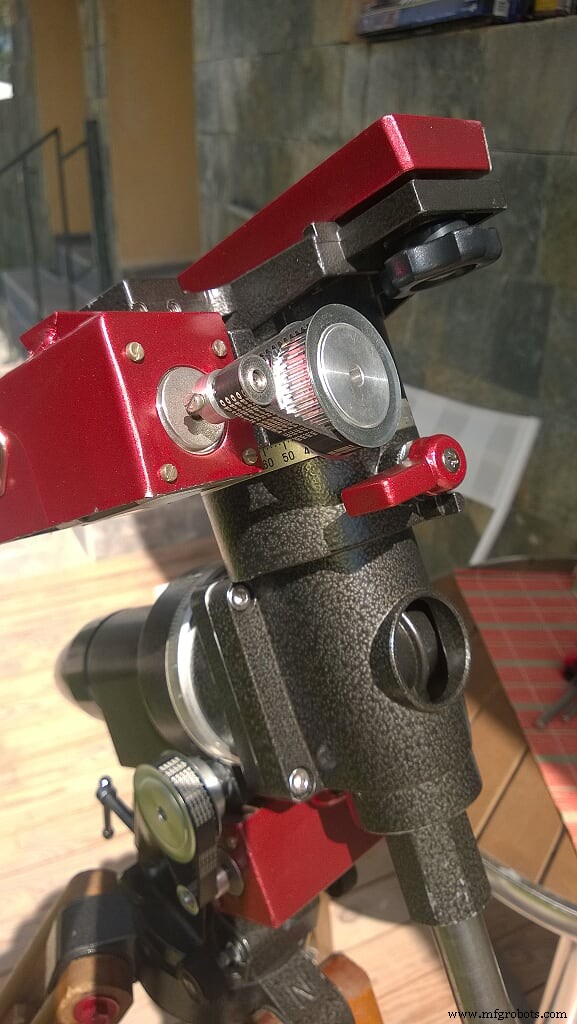
5단계 독일 적도 산
이제 모터 드라이브를 마운트에 연결하는 방법을 공유하고 싶지만 그렇게 할 수 없습니다. 사실 모든 제조업체가 자체 디자인을 만들기 때문에 모든 사람에게 적합한 솔루션은 없습니다.
저는 80년대 Vixen Super Polaris를 사용하는데 아래 방법이 효과적입니다. 귀하가 1단계 에서 내린 결정을 코드에서 값을 변경해야 하는 위치가 이제 작업에 영향을 줍니다. 아래에서 도르래와 벨트 설정을 볼 수 있습니다.
세팅용으로 2세트 구매했습니다. 나는 그것이 어떻게 작동하는지 확신하지 못했고 따라서 감소 1:4 세트와 감소 1:3 세트를 구입했습니다. 감소가 두 풀리 사이의 거리에 영향을 미치기 때문에 벨트의 크기도 달라야 합니다. 좋은 계획과 디자인으로 진행 방법을 미리 결정할 수 있고 약간의 돈을 절약할 수 있다는 점을 인정하지만 저는 급했습니다. 나는 그것을 작동시킬 필요가 있었다!

벨트, 도르래, 마운트를 제 앞에 놓고 난 후 가장 좋은 방법은 1:4 축소를 사용하는 것이라고 결정했습니다. 모든 것이 마운트에 완벽하게 맞는 것처럼 보였고 모터 하우징 작업을 시작했기 때문입니다. 반나절 후에 다음과 같은 결과를 얻을 수 있었습니다.
전체 설정을 테스트하고 최종 설계 결정을 나타내도록 소프트웨어를 약간 변경해야 했습니다(35행에서 변수 값을 4로 업데이트). 다시 테스트했는데 모두 매력으로 작동했습니다.


제대로 테스트하기 위해 별이 빛나는 밤을 기다려야 했지만, 기다리기 전까지 뭔가 잘못되었다는 것을 깨달았습니다!
나는 최고의 Telescope Control GOTO 시스템을 가지고 있었는데, 내 취미 예산으로 살 수 있는 것보다 훨씬 낫지만 제대로 보이지 않았습니다. 약간의 최종 수정이 필요했는데, 나중에 내 rDUINOScope가 자랑스러워졌습니다!
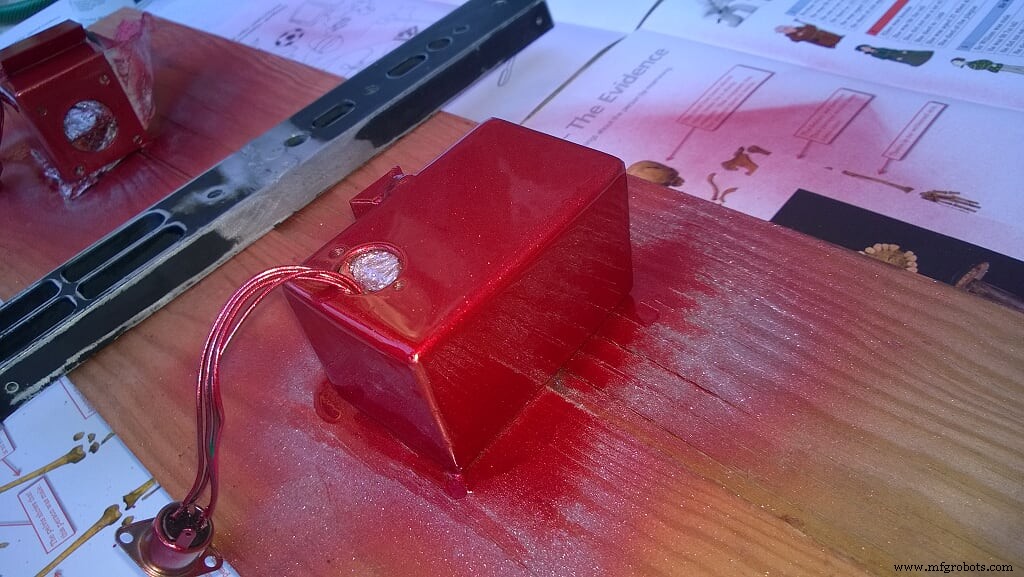
마지막으로, 제 rDUINOScope Vixen SP Ferrari는 제가 생각하는 대로 생겼습니다!


파일
_READ_ME.txt:일부 F.A.Q와 함께 최종 릴리스 v.2.1 Boiana EQ에 대한 설명
_READ_ME.txt_02_Boiana_EQ.ino:메인 Arduino 파일
_02_보이아나_EQ.이노graphic_screens.ino:그래픽 파일 - 메인 파일에 연결
Graphic_screens.inotouch_inputs.ino:TOUCH INPUTS FILE - 메인 파일에 연결
touch_inputs.inoBT.ino:BLUETOOTH COMMUNNICATION - 기본 파일에 연결됨
BT.이노regular_updates.ino:시간 업데이트 - 기본 파일에 연결
regular_updates.ino<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
// 여기에 마운트, 기어 및 드라이브 정보가 표시됩니다.// ... HourAngle 대 microSteps 비율을 계산하는 데 사용됩니다.// SET-UP// --------- ------------------------------------// 주의:RA와 DEC는 동일한 기어비(144 내 경우에는 이빨)!//------------------------------------------ ----int WORM =144;int 리덕터 =4; // 1:4 기어 감속int DRIVE_STP =200; // 스테퍼 드라이브에는 회전당 200개의 단계가 있습니다.int MICROSteps =16; // 항성 운전을 위해 1/16 마이크로스텝 모드를 사용하겠습니다. 최저 속도도 결정합니다.
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); 디지털 쓰기(RA_STP, 높음); 디지털 쓰기(RA_STP,LOW); RA_microSteps +=RA_mode_steps;}else{ digitalWrite(RA_DIR,STP_FWD); 디지털 쓰기(RA_STP, 높음); 디지털 쓰기(RA_STP,LOW); RA_microSteps -=RA_mode_steps;} 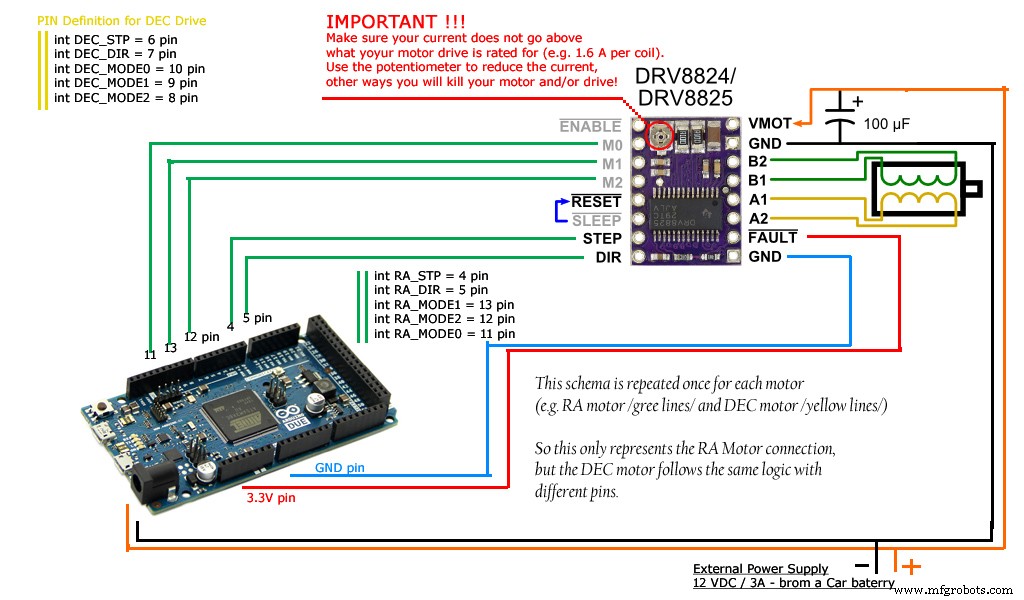 모든 센서를 Arduino DUE에 연결하고 연결하는 방법
모든 센서를 Arduino DUE에 연결하고 연결하는 방법 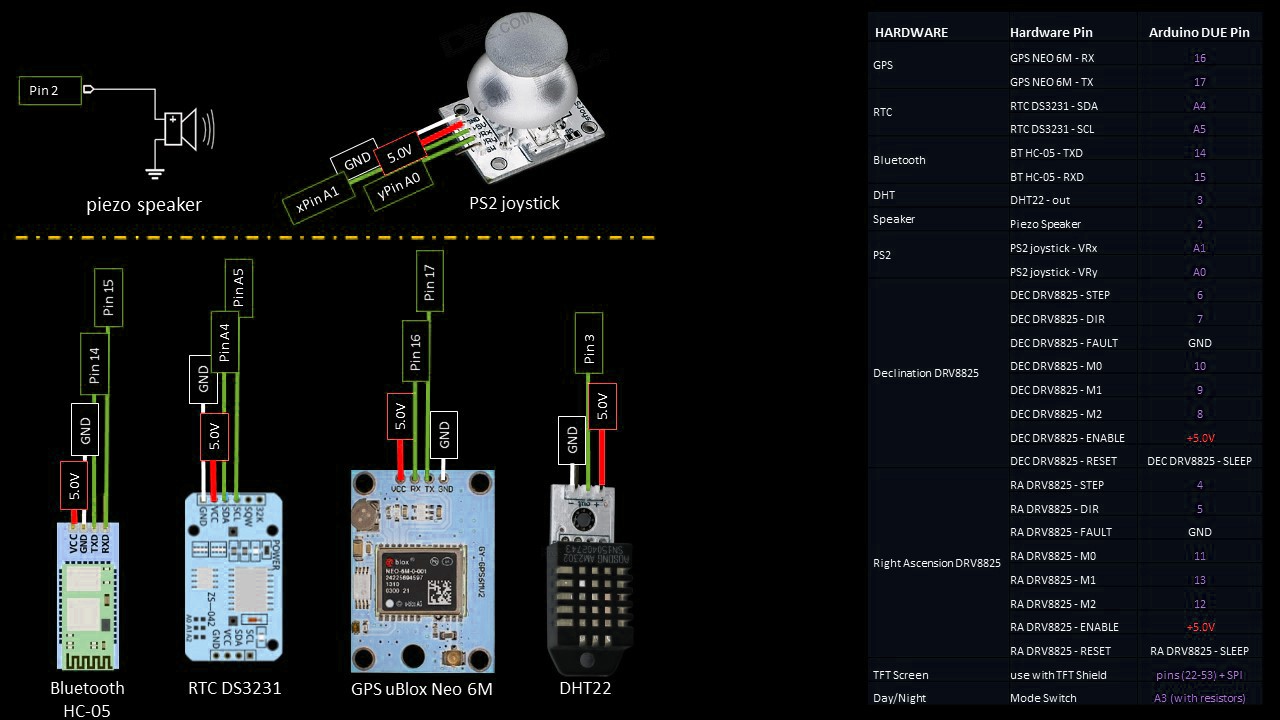
제조공정
이 Arduino Bluetooth Tutorial에서는 Bluetooth 통신을 통해 Arduino를 제어하기 위해 HC-05 모듈을 사용하는 방법을 배웁니다. 자세한 내용은 다음 동영상을 보거나 아래에 작성된 튜토리얼을 참조하세요. 개요 이 튜토리얼에서는 스마트폰을 사용하여 Arduino를 제어하고 노트북이나 PC를 사용하여 Arduino를 제어하는 두 가지 예를 만들었습니다. 이 튜토리얼에 과부하가 걸리지 않도록 다음 튜토리얼에서는 HC-05 블루투스 모듈을 구성하고 두 개의 별도 Arduino 보드 간에 마스터 및 슬
조이스틱 모듈 현재 모션 및 로봇과 관련된 프로젝트를 처리하고 있습니까? 그렇다면 Arduino Joystick 모듈에 대해 들어보았지만 만드는 방법을 모를 가능성이 있습니다. 아니면 Arduino 조이스틱 모듈의 작동 방식에 대한 자세한 정보를 얻고 싶습니까? 그렇다면 올바른 위치에 있습니다. Arduino Joystick의 목표는 Arduino에 모션을 전달하는 것입니다. 그리고 2D(2축)에서 이 작업을 수행하므로 모션 및 로봇 공학 애플리케이션에 적합합니다. 따라서 이 기사에서는 Arduino 조이스틱 모듈, 작