

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 4 | ||||
| × | 4 | ||||
 |
| × | 8 | |||
 |
| × | 2 | |||
 |
| × | 8 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
짧은 소개
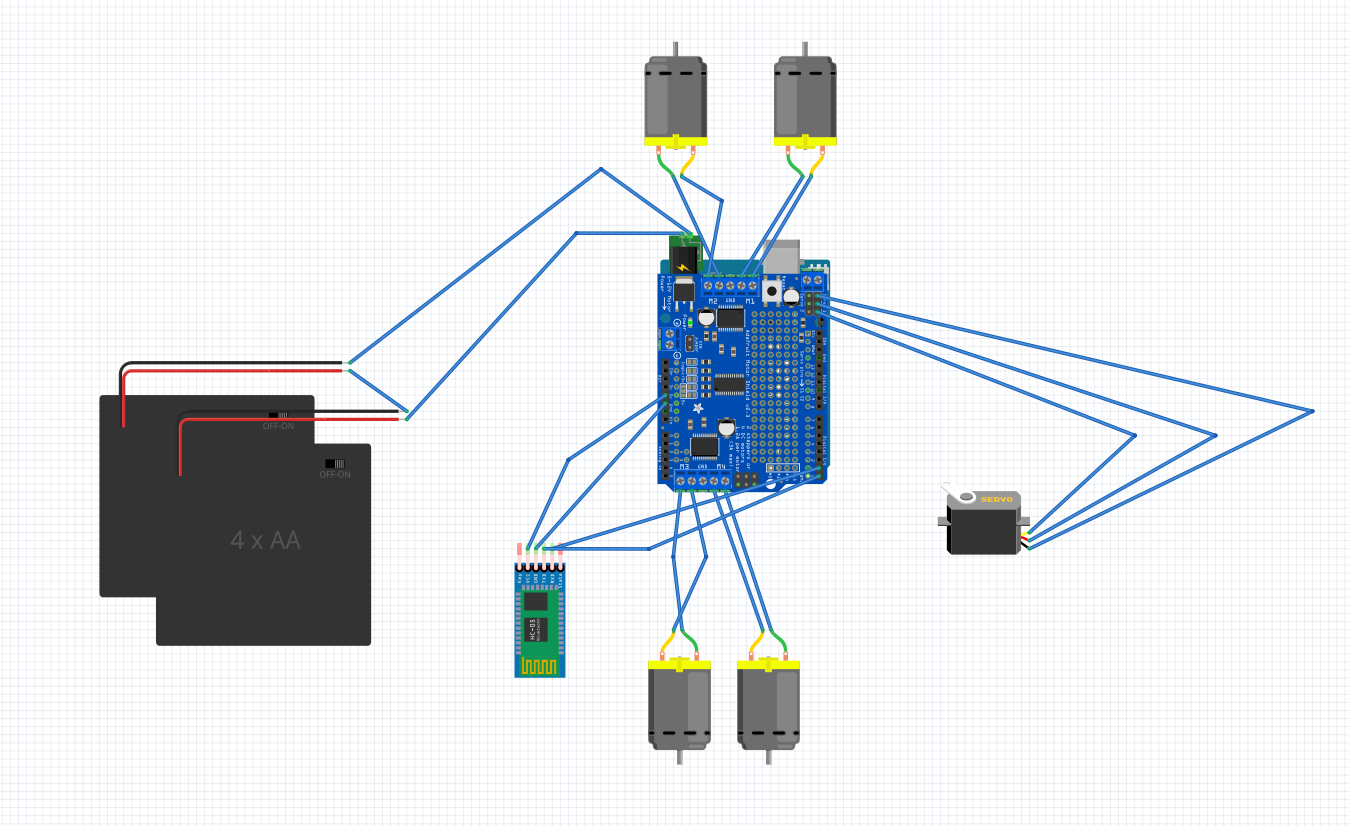
이것은 블루투스 연결을 통해 제어할 수 있는 간단한 4륜 자동차입니다. 차량에는 IP 카메라로 사용할 수 있는 모든 휴대전화를 수납할 수 있습니다. 로봇이 어디로 가는지 모니터링할 수 있는 노드 웹 서버를 사용하여 이 로봇을 자바스크립트로 만들기로 결정했습니다.
그림 1에서 주요 부품의 회로를 볼 수 있습니다.
서버를 실행한 후 제어에 대한 소개와 카메라 보기 창을 포함하는 화면이 나타납니다(그림 2).
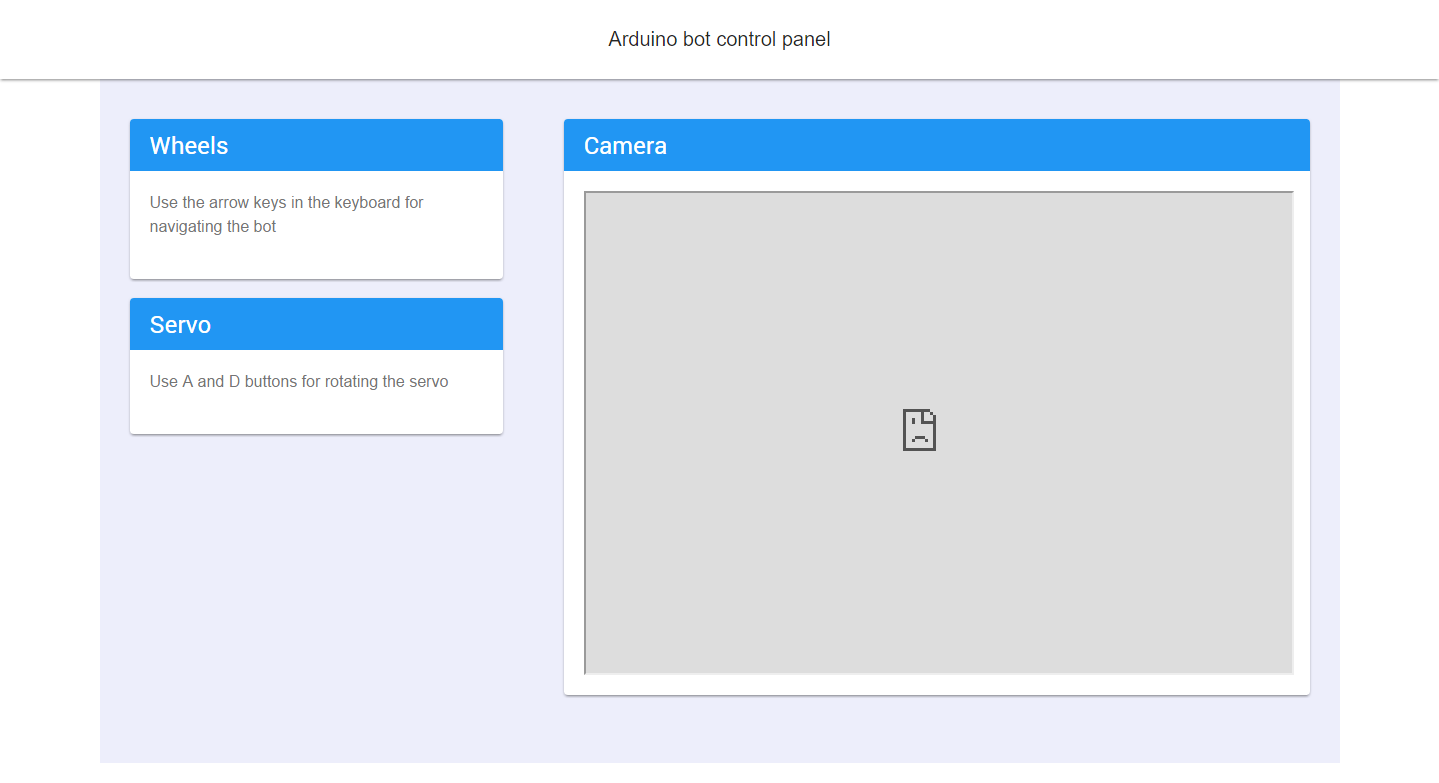
예, 이 레이아웃은 반응형입니다.
섀시
이 버전의 봇에서는 섀시를 직접 만들기로 결정했습니다. 드릴링 머신이 없거나 더 쉬운 솔루션을 원하는 경우 다양한 플라스틱 차체에서 구입할 수 있습니다.
나는 나만의 섀시를 만들기 위해 길을 갔고 생각만큼 쉽지 않았습니다. 가장 중요한 규칙은 회전을 위해 차동 조향을 선택하려면 타이어를 가능한 한 서로 가깝게 배치해야 한다는 것입니다. 다음 링크에서 주요 실수와 기본 물리 규칙을 읽을 수 있습니다.
http://www.rakeshmondal.info/4-Wheel-Drive-Robot-Design
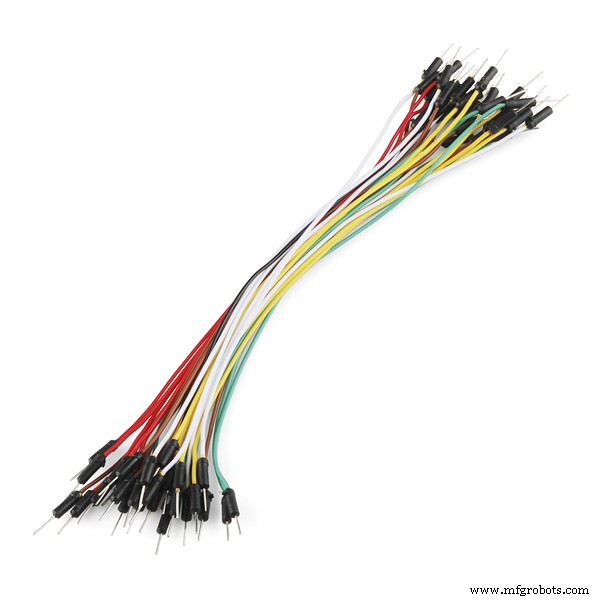
또 다른 문제는 DC 모터를 섀시에 부착하는 방법이었습니다. 제 경우에는 이것을 위한 특별한 부품이 없었기 때문에 작업을 위해 일부 케이블 타이(150/3,5)를 선택하기로 결정했습니다. 타이어를 적절하게 부착하기 위해 가능한 한 정확하게 구멍을 뚫고 하나의 DC 모터에 2개의 케이블 타이를 사용해야 했습니다. 불행히도 모터가 충분히 직선으로 맞지 않을 가능성이 있으며 전진 및 후진을 제어할 때 차가 왼쪽이나 오른쪽으로 약간 움직일 수 있습니다.
배터리
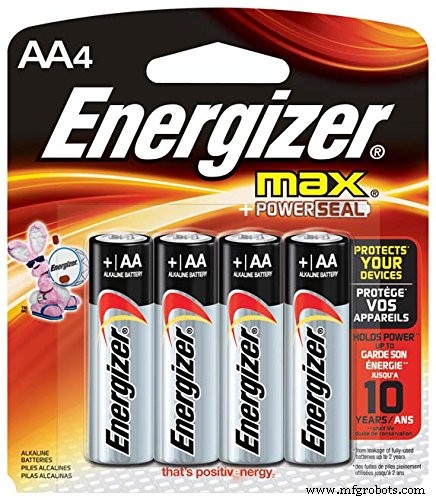
보드와 모터에 전원을 공급하기 위해 작업에 단일 DC 전원 공급 장치를 선택하기로 결정했습니다. 섀시에는 8 x AA 배터리 홀더를 위한 공간이 없었기 때문에 일부 사용자 지정을 해야 했기 때문에 2개의 나사가 있는 2개의 4 x AA 홀더를 서로 연결해야 했습니다. 이를 위해 플라스틱도 뚫어야 했습니다.
전원
제 경우에는 8 x AA 충전식 배터리로 Arduino Uno 보드에 전원을 공급합니다. 이것은 모터 실드에도 사용할 수 있는 충분한 전력입니다. 이 실드에는 분리 가능한 점퍼가 있어 모터 실드가 Arduino에서 전원을 공급받지 못합니다. 이 경우 실드에 있는 전원 핀을 사용하여 실드에 별도로 전원을 공급할 수 있습니다. 다음 링크에서 다양한 전원 옵션에 대해 읽을 수 있습니다.
https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/powering-motors
무선 연결
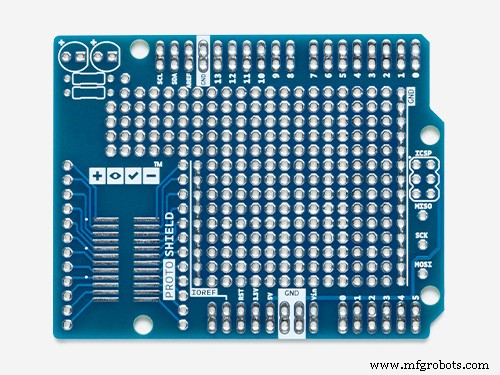
HC-06 블루투스 모듈을 사용하여 자동차와 컴퓨터를 연결했습니다. 나는 가능한 한 적은 케이블을 사용하고 싶었기 때문에 블루투스 모듈을 빈 프로토타입 쉴드에 넣어 맞춤형 Arduino 쉴드를 만들기로 결정했고, 쉴드 아래에 배선을 하고 올바른 부착 메커니즘을 위해 일부 핀 헤더를 납땜했습니다. 그림 3과 그림 4에서 결과를 빠르게 볼 수 있습니다.
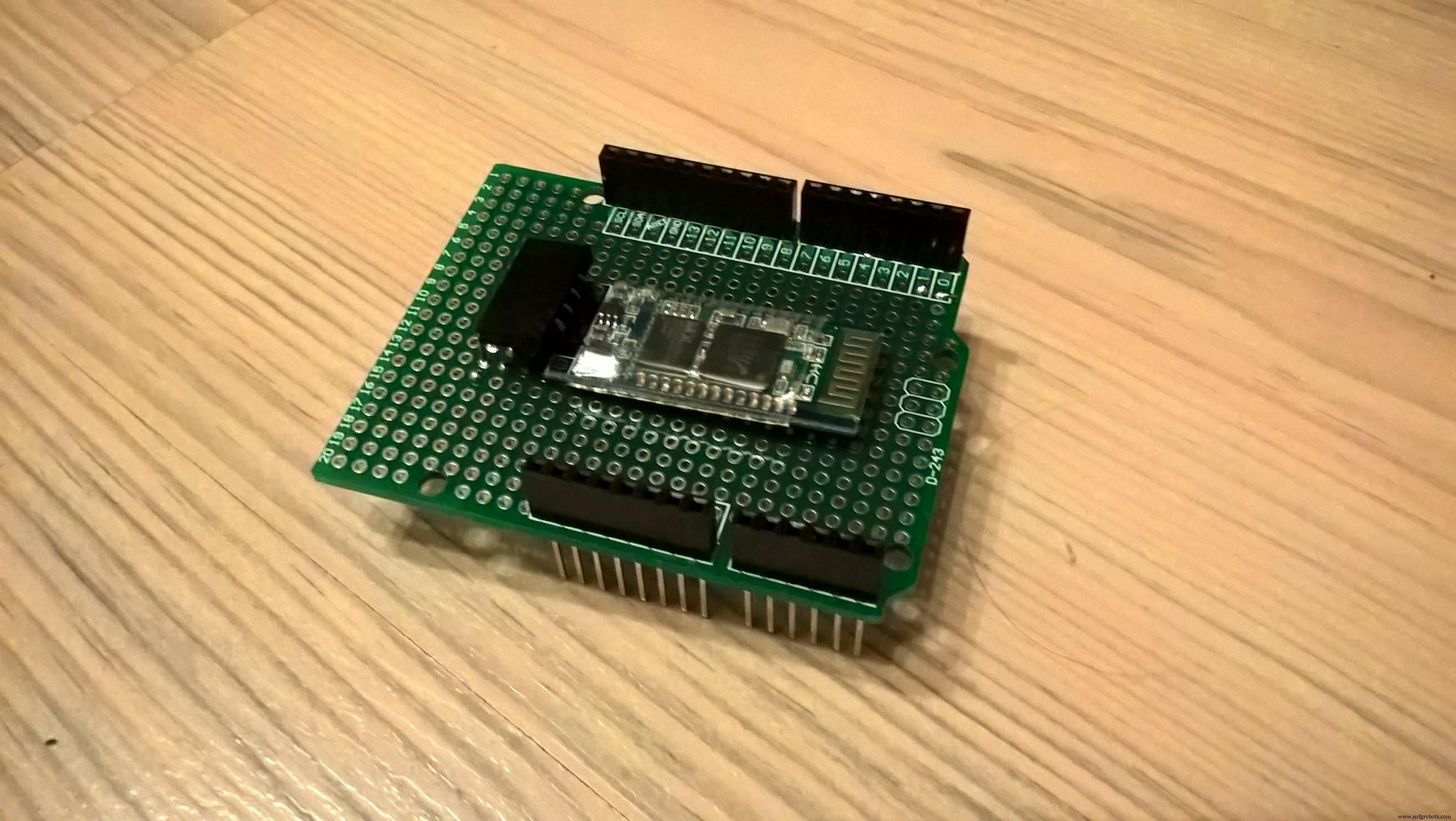
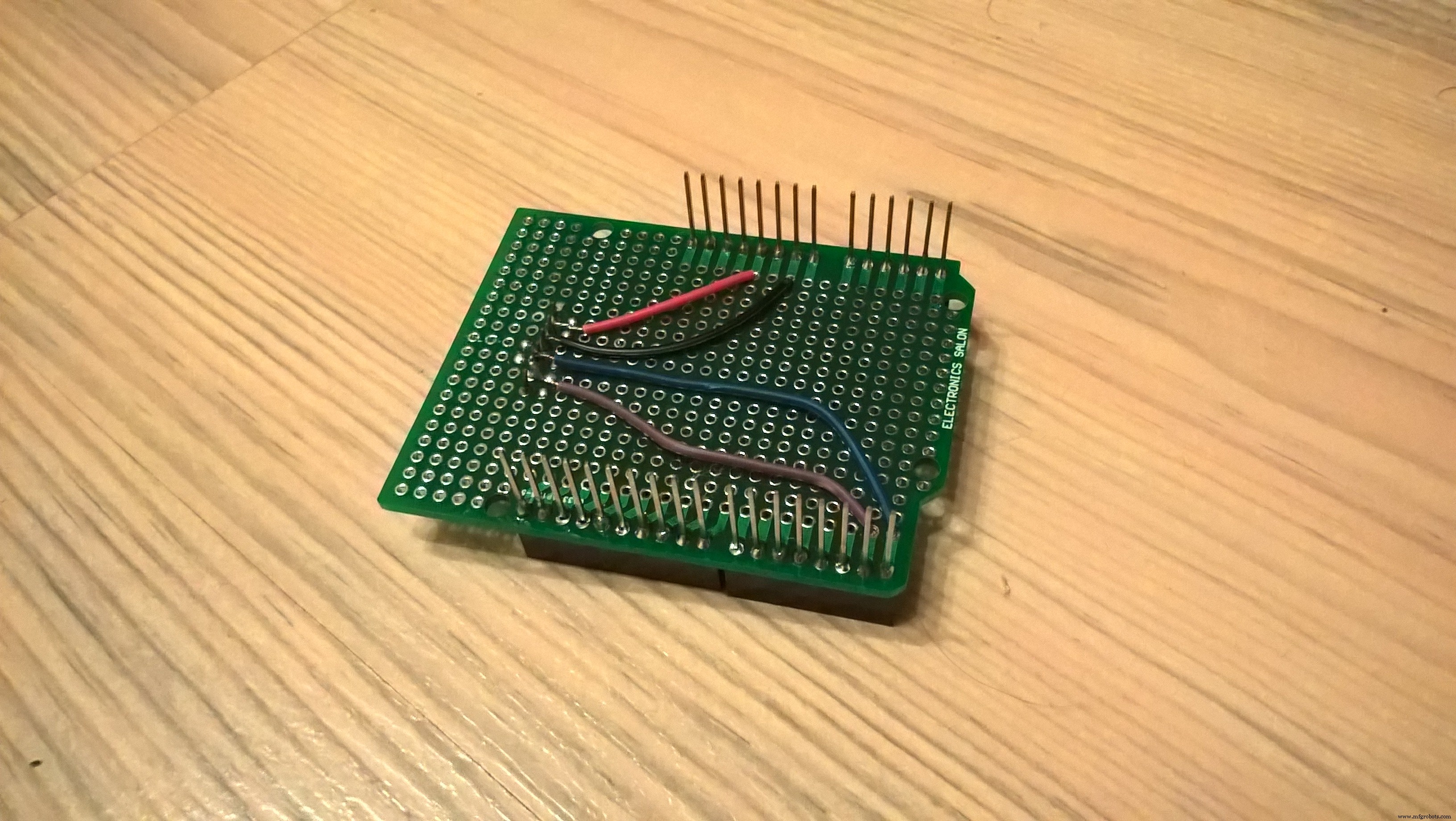
좋은 점은 블루투스 모듈이 보드에 납땜되어 있지 않기 때문에 언제든지 쉴드에서 블루투스 모듈을 도킹 해제할 수 있다는 것입니다.
블루투스 모듈을 설정하려면 이 사이트의 지침을 따르십시오:
https://github.com/rwaldron/johnny-five/wiki/Getting-Started-with-Johnny-Five-and-JY-MCU-Bluetooth-Serial-Port-Module
움직임
로봇은 차동 조향을 사용하여 전진, 후진 및 선회할 수 있습니다. 카메라 홀더는 연속 회전 서보에 부착되어 있어 차량 자체를 움직이지 않고도 휴대폰으로 주변을 둘러볼 수 있습니다. 다음 동영상에서 짧은 데모를 볼 수 있습니다.
휴대전화
프로젝트에 Nokia Lumia 520을 사용했고 상점에서 찾을 수 있는 Win IP Camera 애플리케이션을 사용했습니다.
https://www.microsoft.com/en-us/store/p/win-ip-camera/9nblggz4xb1
코드 정보
자바스크립트 개발자로서 나는 제어 페이지용 노드 웹 서버를 만들고 모양과 느낌 및 코드 구문 향상을 위해 멋진 라이브러리를 사용하기로 결정했습니다. 내 github 페이지와 다음 섹션에서 전체 목록을 볼 수 있습니다.
프론트엔드와 백엔드 모두에서 모듈화를 선택하기로 결정했습니다. 다음은 애플리케이션의 진입점입니다.
var boardModule =require('./src/boardModule'), servoModule =require('./src/servoModule'), motorModule =require('./src/motorModule'); boardModule.initBoard().then(function() { motorModule.initMotors();servoModule.initServo();}); 프런트 엔드 쪽에서도 각 모듈에 대해 분리를 사용합니다.
'./wheelsControl'에서 {moveWheels, stopWheels} 가져오기; './servoControl'에서 {moveServo, stopServo} 가져오기; document.onkeydown =checkKeyDown;document.onkeyup =checkKeyUp; function checkKeyDown(e) { moveWheels(e.keyCode); moveServo(e.keyCode);} function checkKeyUp(e) { stopWheels(e.keyCode); stopServo(e.keyCode);} 전체 코드베이스는 위의 내 github 저장소를 확인하십시오.
소트웨어 라이브러리 <울>
마지막 단어
저는 이 IoT 세계의 초보자이며 이것이 저의 첫 번째 프로젝트입니다. 최적의 솔루션을 사용했다고 말하고 싶지는 않지만 이 가이드에서 유용한 정보를 찾을 수 있기를 바랍니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">제조공정
일반적으로 릴레이 쉴드에서 4개의 릴레이를 개별적으로 제어하려면 Arduino 코드가 필요합니다. 차폐는 차례로 고전력 장치를 제어하는 데 도움이 됩니다. 장치에는 팬, 전구, LED 스트립, 펌프, 액추에이터 등이 포함됩니다. 릴레이 실드에도 뛰어난 기능이 있습니다. 그 중 일부는 릴레이의 상태를 표시하는 4개의 동적 LED 표시기, 4개의 고품질 릴레이, NC/NO 인터페이스 등이 있습니다. 오늘의 자습서에서는 Arduino Relay Shield를 사용하는 방법을 보여줍니다. 릴레이 실드와 4채널 릴레이 모듈의 차이점
Arduino 오픈 소스 하드웨어 플랫폼에서 회로를 생성하려면 Arduino 실드를 사용해야 합니다. 프로젝트에서 하드웨어 및 회로 배선의 복잡성을 줄이는 데 도움이 됩니다. 이 기사에서는 Arduino Sheild가 무엇인지, 다양한 유형 및 설치 프로세스에 대해 알아봅니다. Arduino Shield란 무엇입니까? Arduino 실드는 추가 기능을 제공하기 위해 Arduino 보드에 부착되는 하드웨어 애드온 보드입니다. Bluetooth, 모터 드라이버 및 WiFi와 같은 기능을 사용하여 다양한 IoT 프로젝트를 만드는 데