

제조공정

산업 제조
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
안녕하세요!
제어할 수 있는 모든 것이 좋습니다. 그렇지 않아? 우리 인간은 물건을 제어하는 것을 좋아하고 이것이 자동화와 로봇이 매력적인 이유입니다.
이 튜토리얼에서는 자신만의 블루투스 제어 자동차를 만드는 방법을 알려줍니다. 시작하겠습니다.
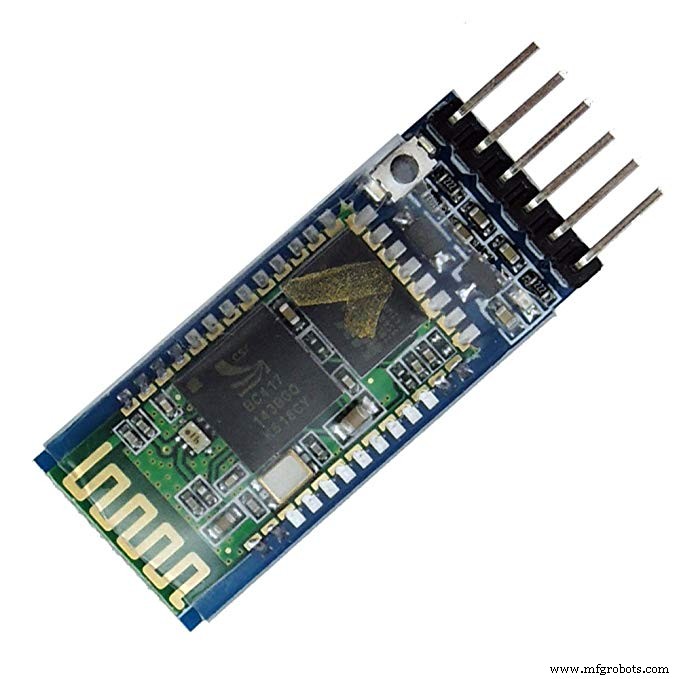
이것은 블루투스로 제어되는 자동차이므로 이 프로젝트에서는 제어 데이터 패킷을 수신하기 위해 HC-05 블루투스 모듈을 사용할 것입니다.
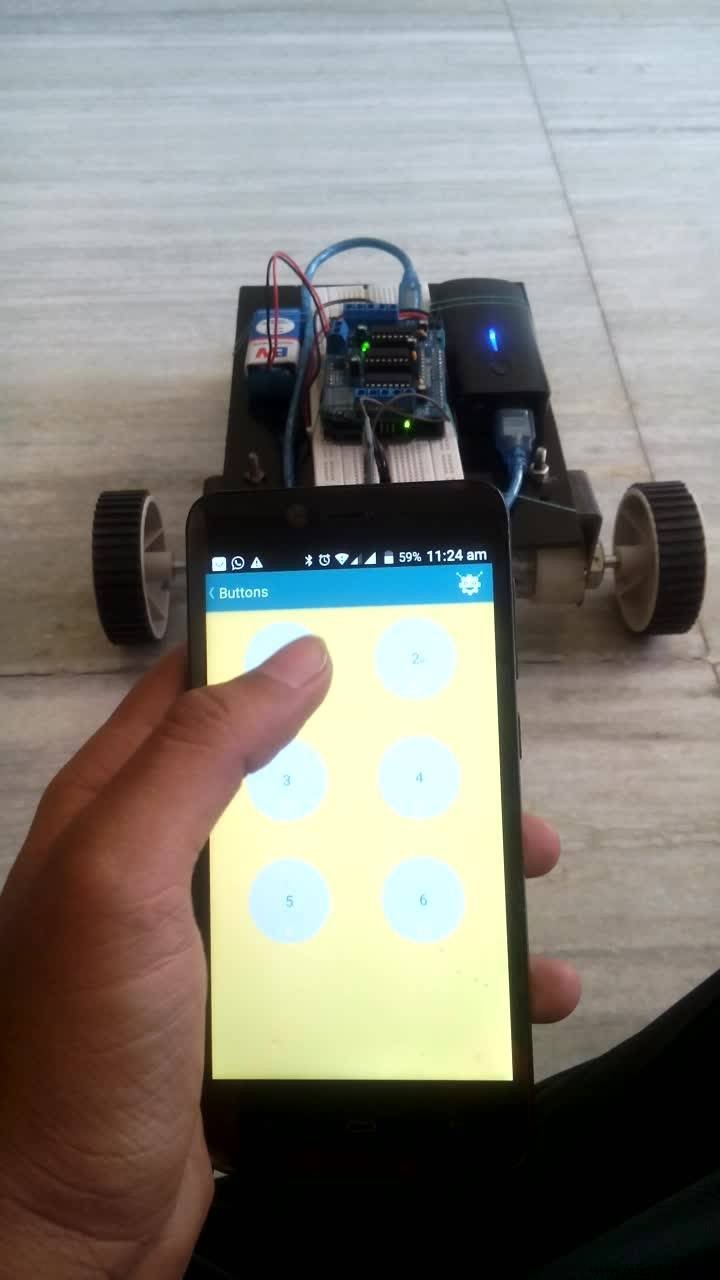
제어 데이터 패킷을 블루투스 모듈로 보낼 안드로이드 앱도 필요합니다. 이를 위해 타사 응용 프로그램(다운로드하려면 여기를 클릭)을 사용합니다.
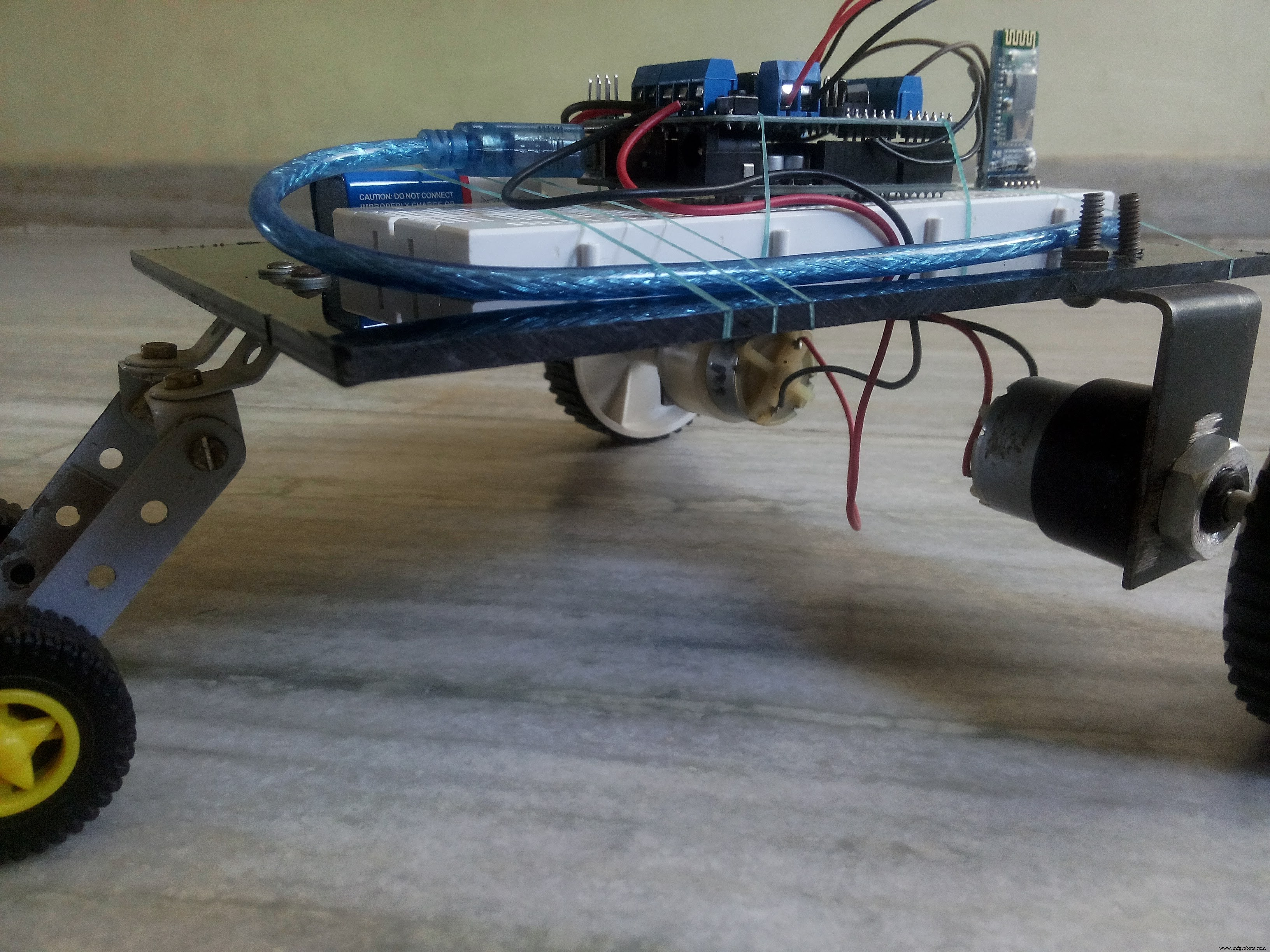
<울>우리가 이 프로젝트를 위해 만들고 있는 차는 듀얼 모터카가 될 것입니다. 2개의 12v 200rpm DC 모터를 사용했습니다. 기성품 섀시를 사용할 수 있습니다. PVC 시트를 섀시로 사용했습니다.
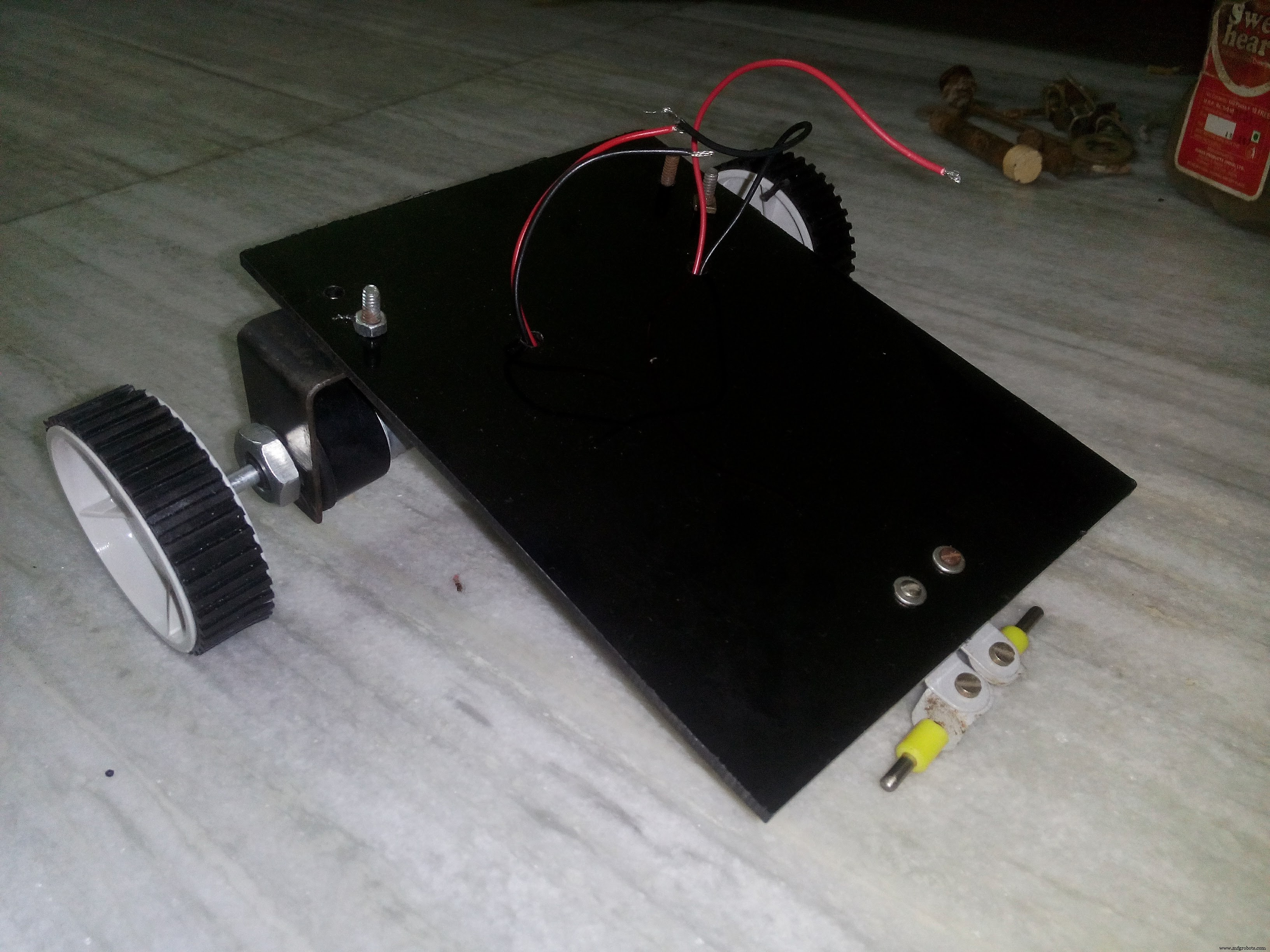
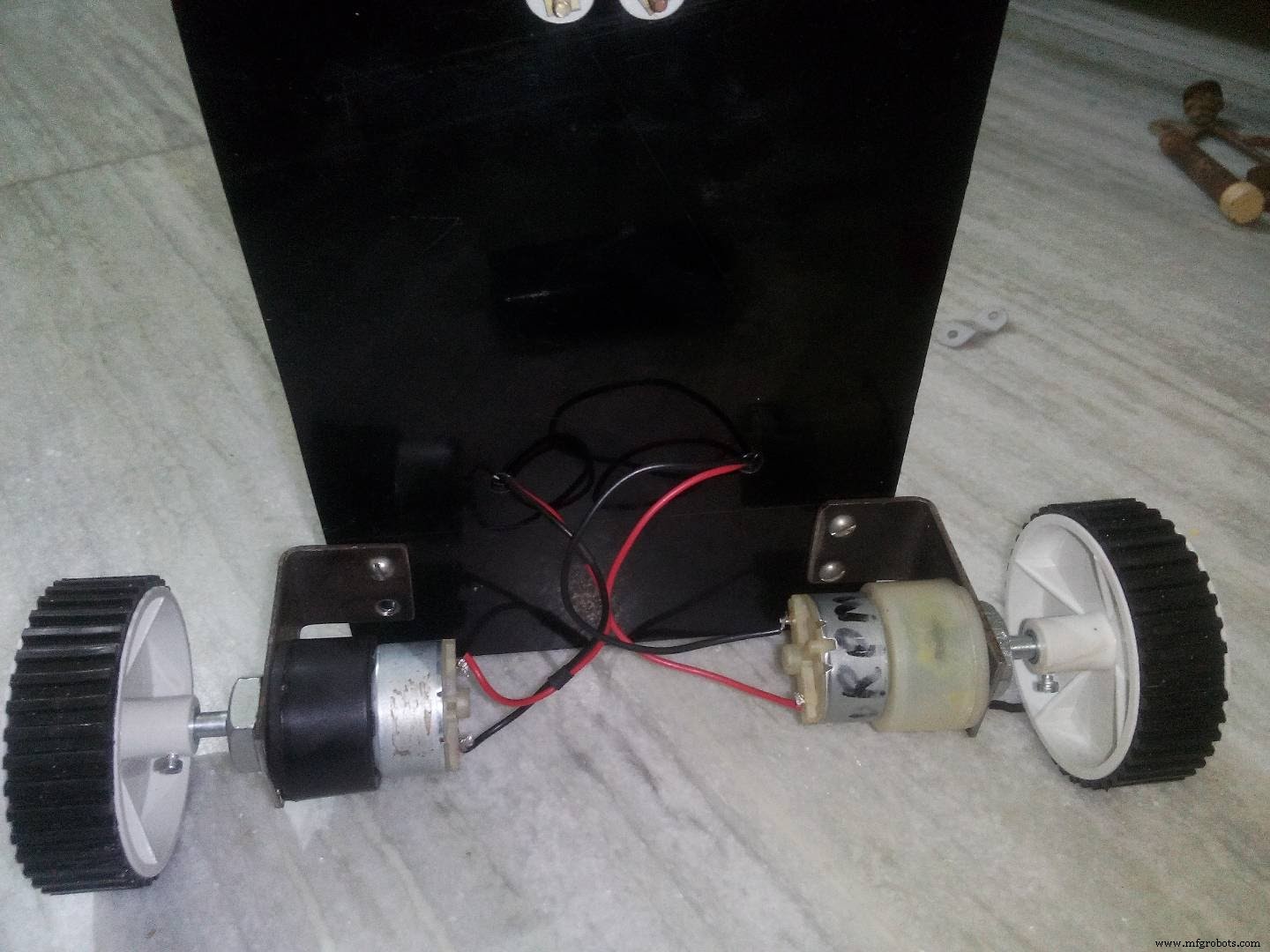
이로써 우리 차의 기본 구조가 완성되었습니다. 이 디자인을 사용하거나 고유한 디자인을 개발할 수 있지만 이것은 2개의 모터 디자인이므로 가능한 한 무게를 낮추는 것을 기억하십시오.
--> 회로
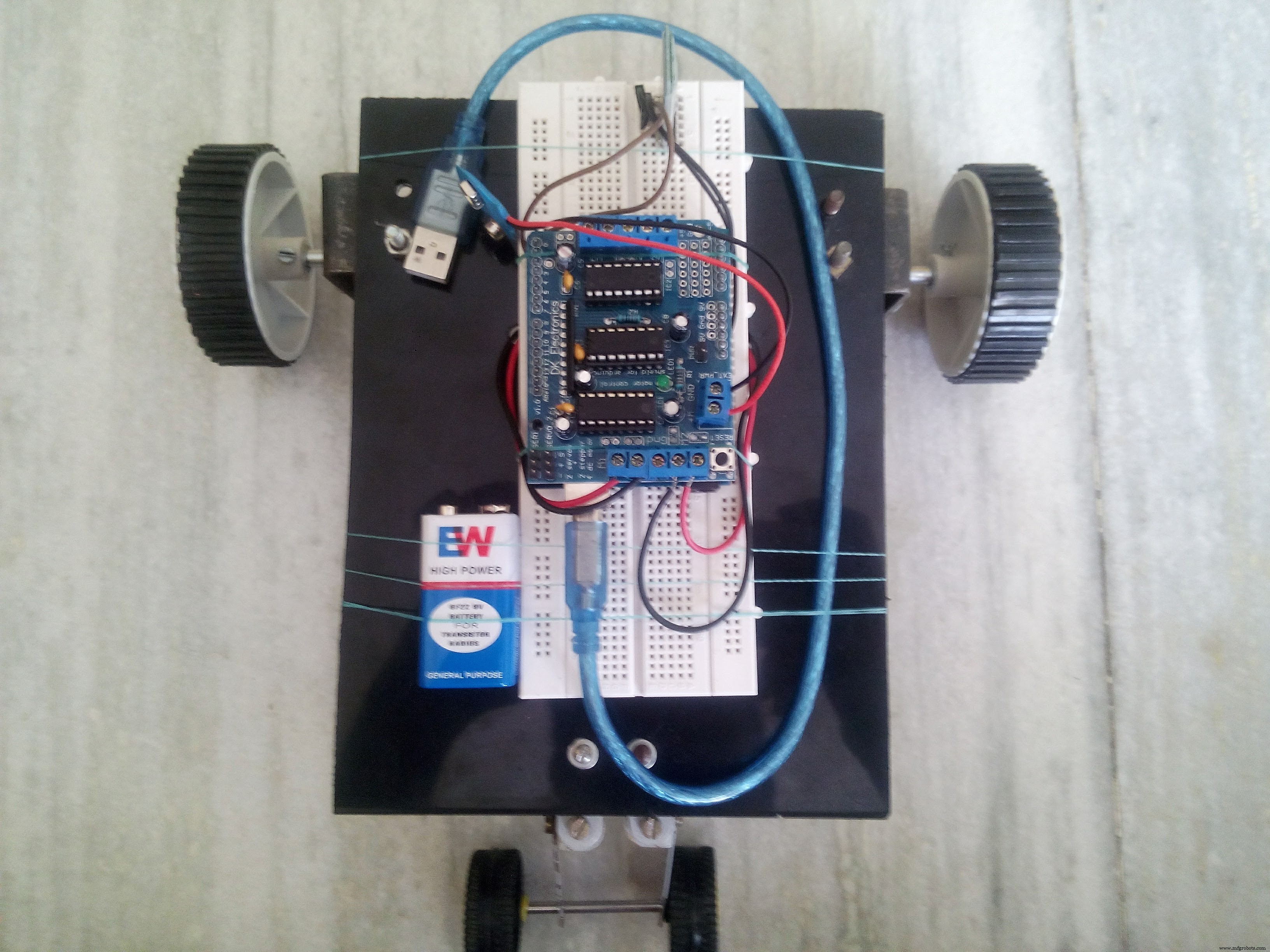
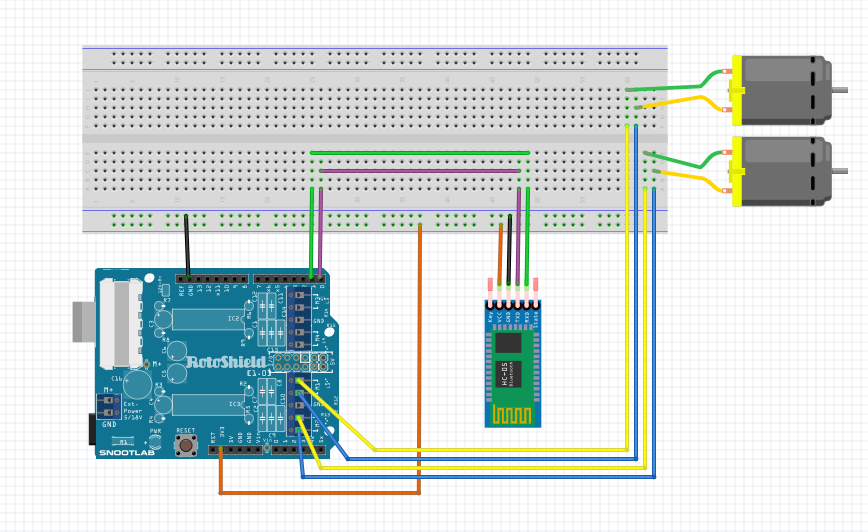
이제 회로를 구성해 보겠습니다.
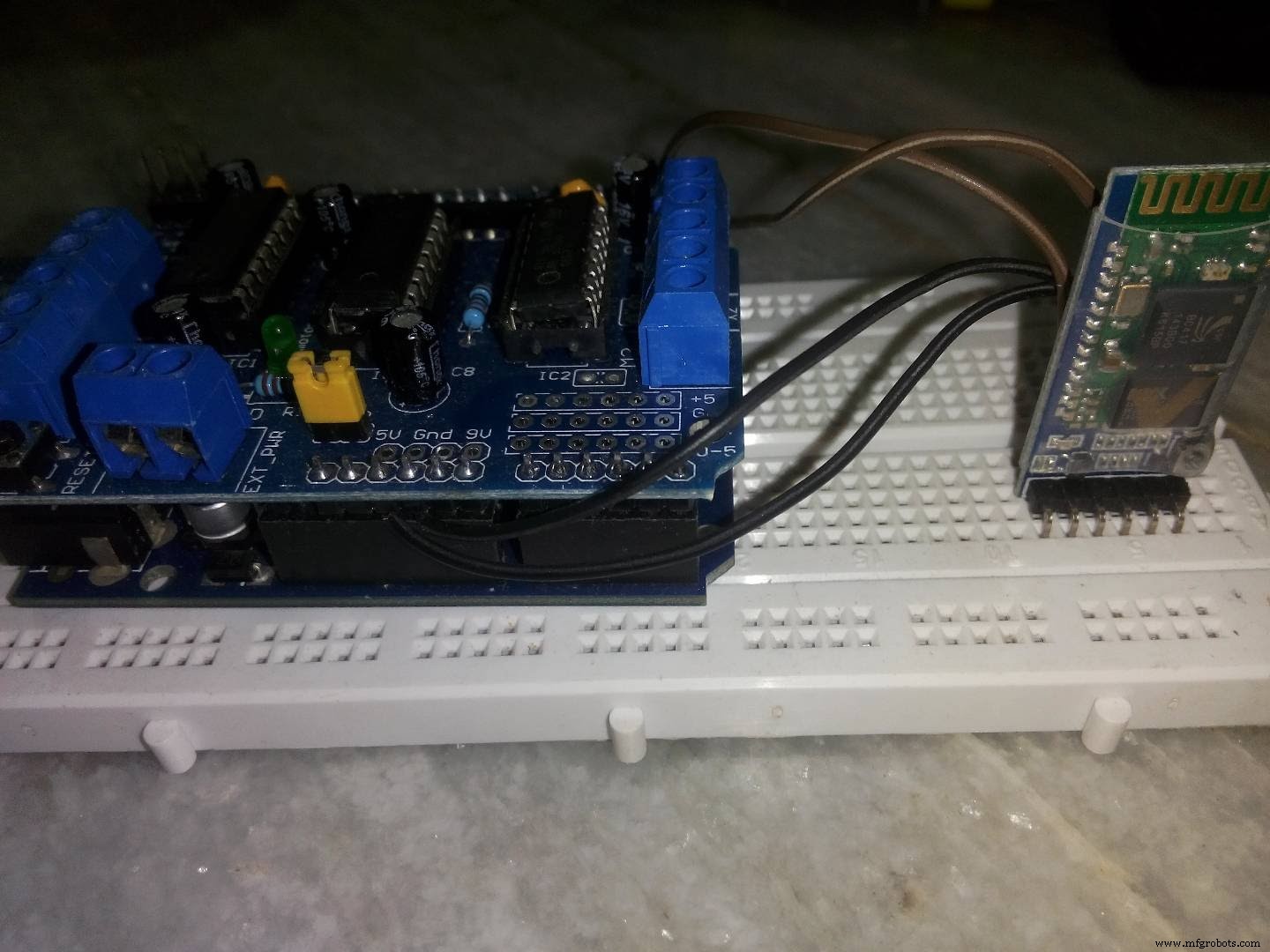
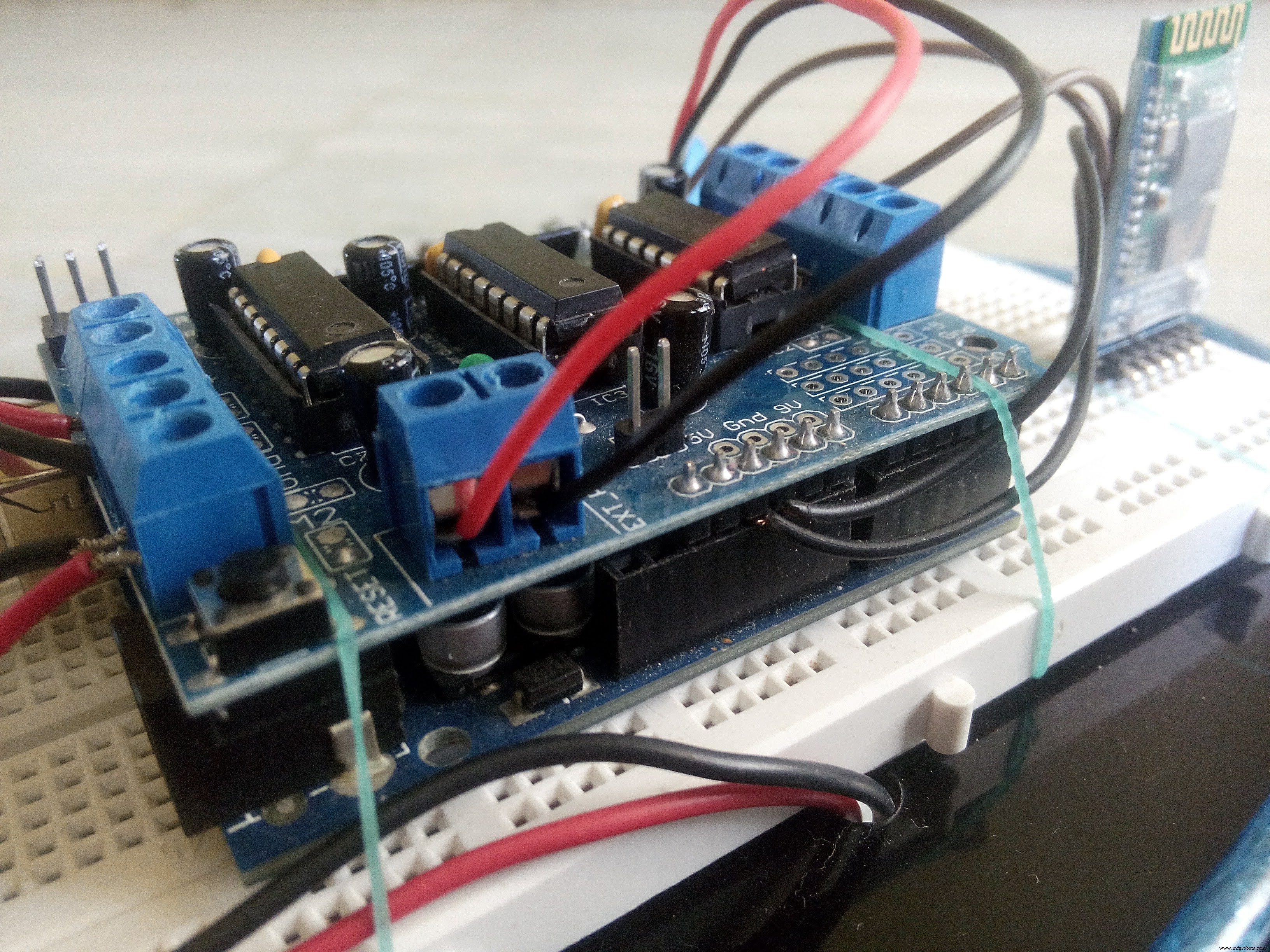
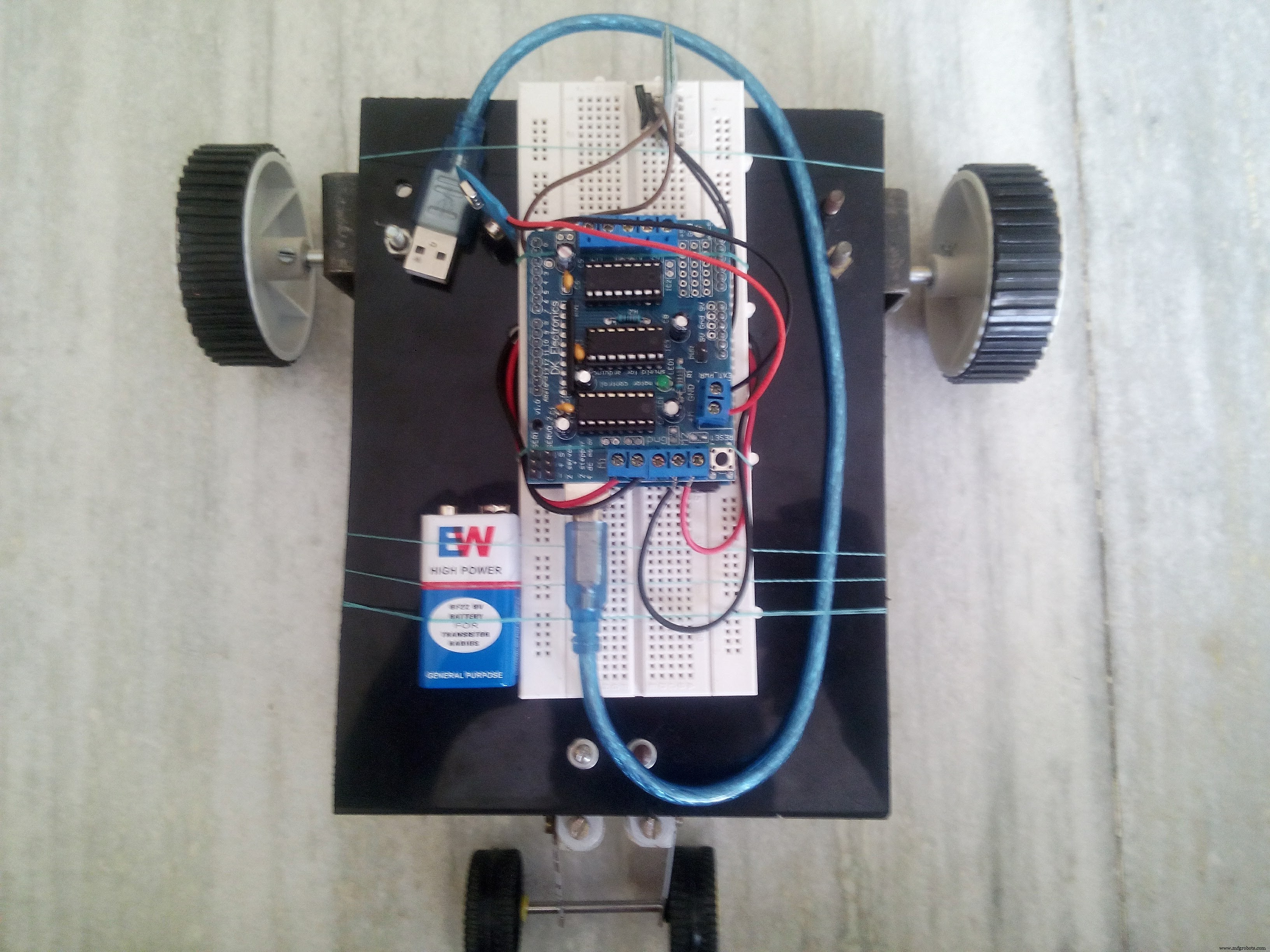
회로도를 따라 연결하십시오. 모든 연결이 완료된 후의 모습입니다.
--> 전원 공급 장치
이제 이것이 약간 중요합니다.
Arduino Uno에 전원을 공급하기 위해 5v 출력 전압의 전원 은행이 사용됩니다. 이것은 12v dc 모터를 구동하기에 충분하지 않습니다. 따라서 추가 전원이 필요합니다.
나는 18v 공급을 얻기 위해 2개의 9v 배터리를 직렬로 사용했습니다. 여기서 가장 큰 문제는 여기에도 상당한 양의 전류가 필요하다는 것이었습니다.
내 배터리가 충분한 전류를 공급하지 못하여 이 차량의 성능이 100% 만족스럽지 않았습니다. 작동 중이지만 모터가 매우 낮은 속도로 작동했습니다.
따라서 12v 배터리를 사용하는 것이 좋습니다. 그렇지 않으면 속도와 타협해야 합니다.
-->코드
여기서는 모터의 회전 방향을 사용하여 자동차의 방향을 제어합니다.
정방향 - 두 모터가 모두 정방향으로 움직입니다.
뒤로 - 두 모터가 모두 역방향으로 움직입니다.
왼쪽 - 왼쪽 모터가 뒤로 이동하고 오른쪽 모터가 앞으로 이동합니다.
오른쪽 - 왼쪽 모터가 앞으로 이동하고 오른쪽 모터가 뒤로 이동합니다.
정지 - 두 모터 모두 정지
void forward(){ motor1.run(FORWARD); motor2.run(FORWARD);} 역방향 무효(){ motor1.run(BACKWARD); motor2.run(BACKWARD);}왼쪽() 무효{ motor1.run(BACKWARD); motor2.run(FORWARD);} 무효 right(){ motor1.run(FORWARD); motor2.run(BACKWARD);} 무효 Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
----------------------------------------------- ---------------------------------------
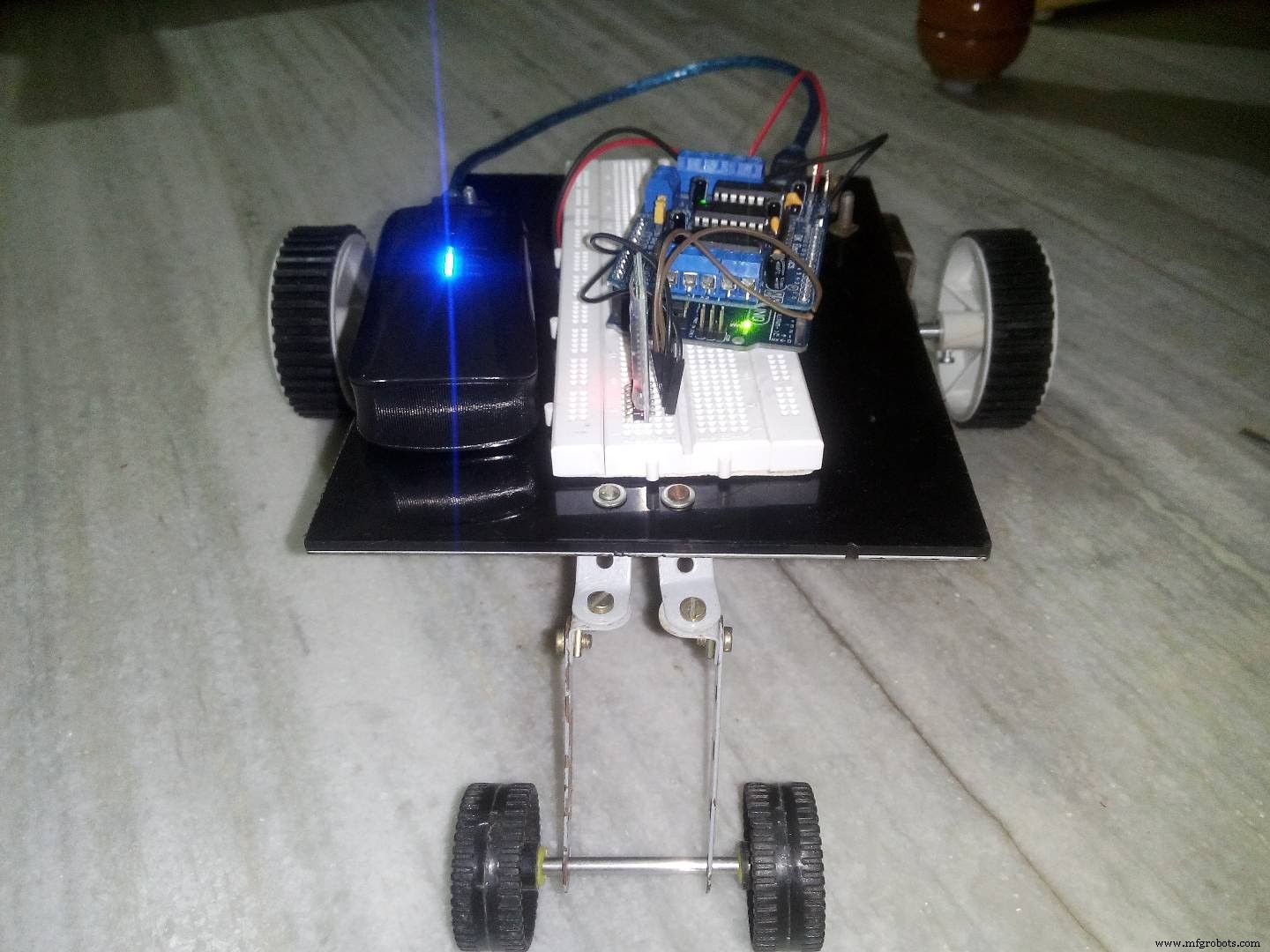
그렇게 되었습니다!
1. Arduino에 코드를 업로드하기만 하면 됩니다.
2. 연결하십시오.
3. 앱을 실행합니다.
4. 휴대폰을 차량에 연결합니다.
완성된 BEAUTY입니다!

이 튜토리얼이 진행하기에 충분했기를 바랍니다. 이 프로젝트에 대한 몇 가지 변경 사항이나 추가 사항에 대한 제안 사항이 있으면 의견 섹션에 알려주십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#includeAF_DCMotor motor1(1); //motor1은 왼쪽입니다. motorAF_DCMotor motor2(2); //motor2는 올바른 motorint val;void setup(){ Serial.begin(9600); motor1.setSpeed(255); //모터 속도 설정 motor2.setSpeed(255); Stop();}void loop() { bt=Serial.read();if(val=='1') //블루투스 모듈이 1을 수신하면 자동차가 앞으로 이동합니다{ forward(); }if(val=='2') //블루투스 모듈이 2를 수신하면 자동차는 뒤로{backward(); }if(val=='3') //블루투스 모듈이 3을 수신하면 자동차가 왼쪽으로 움직입니다{ left(); }if(val=='4') //블루투스 모듈이 4를 수신하면 자동차가 오른쪽으로 움직입니다{ right(); }if(val=='5') //블루투스 모듈이 5를 수신하면 car stop{ Stop(); }}포워드(){ motor1.run(FORWARD); motor2.run(FORWARD);} 역방향 무효(){ motor1.run(BACKWARD); motor2.run(BACKWARD);}왼쪽() 무효{ motor1.run(BACKWARD); motor2.run(FORWARD);} 무효 right(){ motor1.run(FORWARD); motor2.run(BACKWARD);} 무효 Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
제조공정
구성품 및 소모품 Arduino UNO 어떤 종류의 Uno도 가능합니다. 저는 Geekcreit Uno가 잘 작동합니다. × 1 브레드보드(일반) × 1 점퍼 와이어(일반) 남성/남성 필수 × 1 LED(일반) 빨간색, 녹색 및 파란색 조명이 필요합니다. × 3 Arduino USB 2.0 데이터 케이블 × 1 저항 100옴 브라운, 블랙, 브라운 × 1 앱 및 온라인 서비스 Arduino IDE
구성품 및 소모품 Arduino UNO × 1 HC-05 블루투스 모듈 × 1 카메라 OV7670 × 1 Arduino TFT 실드 × 1 이 프로젝트 정보 오늘날에는 카메라, 무선 장치 및 기타 기술 발전이 있는 휴대 전화를 사용하는 사람을 거의 놀라게 할 수 없습니다. Arduino 플랫폼 덕분에 수백만 명의 사람들이 전자 및 프로그래밍의 놀라운 세계를 발견했습니다. 100, 500 지침은 블루투스를 통해 휴대 전화와 Arduino간에