

임베디드

산업 제조
Bluetooth Low Energy를 사용하는 자동차 액세스 시스템에는 일반적으로 CAN(컨트롤러 영역 네트워크) 버스 또는 LIN(로컬 상호 연결 네트워크) 버스를 통해 통신하는 중앙 모듈과 다중 위성 모듈/노드가 있습니다. 위성 모듈은 블루투스 통신 범위를 향상시키기 위해 차량 주변에 물리적으로 분산됩니다.
시스템 설계자는 동일한 소프트웨어로 하나의 PCB를 설계하여 위성 모듈의 제조 가능성을 개선하여 차량에 설치하는 것이 Bluetooth 노드의 위치에 구애받지 않도록 하고자 합니다. 그러나 각 위성 노드의 설치 시점의 하드웨어와 소프트웨어가 동일하기 때문에 차량에 모듈을 장착한 후 중앙 모듈이 각 위성 노드에 고유한 CAN 또는 LIN 주소를 할당할 수 있도록 하는 방식이 필요합니다.
한 가지 옵션은 전용 LIN 데이지 체인 네트워크를 사용하여 제조 중에 CAN ID를 모듈과 공유하는 것입니다. 이 시나리오에서 중앙 모듈은 LIN 인터페이스를 사용하여 각 위성 모듈을 처리하지만 LIN 인터페이스는 차량 수명 동안 다시 사용되지 않습니다. 또 다른 옵션은 BOM(Bill of Material) 비용을 줄이는 개별 구현으로 전용 LIN 버스를 대체하는 것입니다. 시스템 비용을 추가로 줄이기 위해 추가 하드웨어 없이 Bluetooth만 사용하는 진정한 무선 옵션은 모듈을 처리하기 위해 노드에서 이미 사용 가능한 Bluetooth 인프라의 용도를 변경합니다.
궁극적으로 무선 방식은 BOM, 시스템 배선 및 이제는 필요하지 않은 구성 요소의 보관, 관리 및 조립 비용을 줄입니다. 이 문서에서는 무선 방식에 대해 더 자세히 살펴보기 전에 유선 자동 주소 지정 방식에 대한 개요를 제공합니다.
자동차 차량 액세스 시스템은 키로서의 전화(phone-as-a-key) 또는 기타 디지털 키 기능에 Bluetooth 저에너지를 사용하는 경향이 있습니다. 이 시스템은 수동 입력 수동 시동 시스템과 유사하게 작동하지만 운전자의 스마트폰을 키로 사용할 수 있는 기능이 추가되어 기존의 열쇠 고리를 대체합니다. PaaS(Phone-as-a-Key) 호환 차량은 중앙 모듈 또는 스마트 키 모듈과 여러 위성 모듈을 구현하며, 각각은 스마트폰 또는 열쇠 고리에서 Bluetooth 신호를 수신할 수 있습니다. 일반적인 시스템에는 중앙 모듈 외에 6~12개의 위성 모듈이 있을 수 있습니다(그림 1).
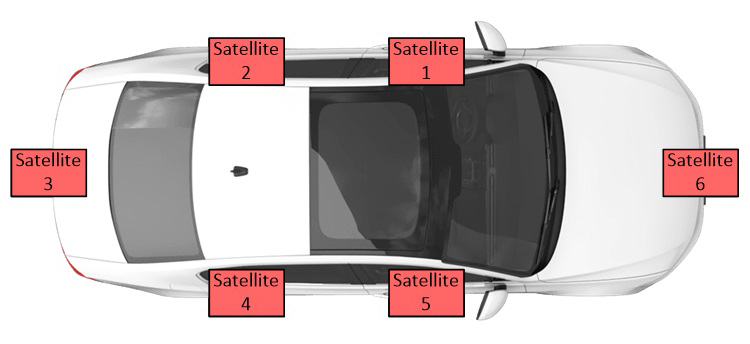
그림 1. 이 다이어그램은 Bluetooth 위성 모듈이 차량 전체에 배포될 수 있는 위치를 보여줍니다.
소비자는 언제 전화나 열쇠 고리가 차량의 잠금 해제 영역 내에 있는지 결정할 수 있는 열쇠로서의 전화 시스템이 필요합니다. 스마트폰이나 열쇠 고리의 위치를 대략적으로 파악하기 위해 시스템은 다양한 위성 모듈에서 수신한 신호를 삼각 측량합니다. 이 신호는 조수석 도어, 로커 패널, 트렁크 또는 범퍼와 같은 장소에서 차량 전체에 분산됩니다.
차량의 중앙 모듈은 CAN 버스 또는 LIN 버스와 같은 통신 인터페이스를 사용하여 위성 모듈과 통신합니다. 중앙 모듈은 각 위성 모듈에서 수신한 데이터를 사용하여 스마트폰 또는 열쇠 고리의 위치를 삼각 측량한 다음 차량에 대한 진입 액세스를 허용할지 여부를 결정합니다. 그림 2는 CAN 버스가 중앙 모듈과 위성 모듈 간의 주요 통신 네트워크로 사용되는 방법을 보여줍니다.
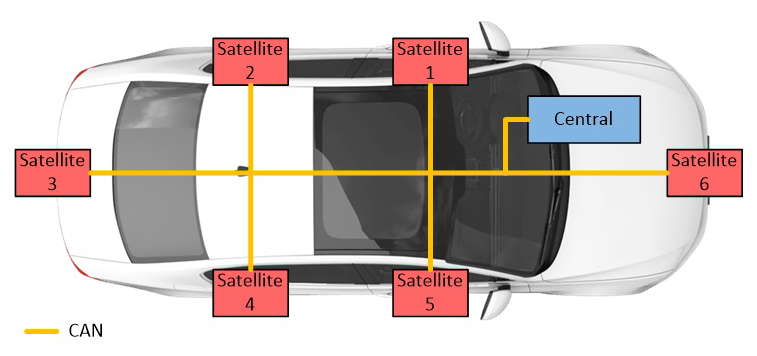
그림 2. CAN 버스는 Bluetooth 자동차 액세스 시스템 네트워크에서 중앙 모듈과 위성 모듈 간의 주요 통신 네트워크로 가정할 수 있습니다.
위성 모듈의 CAN 버스 주소를 통해 중앙 모듈은 데이터를 수신하는 위성 모듈을 결정할 수 있습니다. 중앙 모듈은 고유한 CAN ID 또는 주소를 전체 시스템 설계에 의해 결정된 각 특정 위성 모듈의 위치와 연결합니다. 버스 주소가 유선 또는 하드 코딩된 각 위성 모듈에 대해 고유한 PCB를 갖는 것보다 모든 위성 모듈에 대해 단일 버전의 펌웨어를 실행하는 단일 PCB 설계를 갖는 것이 유리할 것입니다. 이렇게 하면 6개, 8개 또는 그 이상의 거의 동일한 장치의 제조 및 재고 관리와 관련된 추가 비용 및 물류 문제를 피할 수 있습니다. 단일 디자인은 또한 차량의 어느 곳에서나 동일한 위성 모듈을 설치할 수 있도록 하여 제조를 단순화합니다.
위성 노드의 하드웨어와 소프트웨어는 설치 당시 모두 동일하고 주소가 지정되지 않았기 때문에 중앙 모듈이 자동차에 설치한 후 각 위성 모듈에 고유한 CAN ID 또는 주소를 할당할 수 있도록 하는 방식이 필요합니다.
유선 자동 주소 지정:LIN 데이지 체인 방식
현재 자동차의 위성 모듈에 CAN 버스 주소를 할당하는 것은 버스에서 데이지 체인으로 연결된 위성과 함께 별도의 통신 네트워크(예:LIN)를 사용하여 수행됩니다(그림 3). 중앙 모듈은 CAN 버스 네트워크 주소를 LIN 버스를 통해 첫 번째 위성 노드로 보냅니다. 완료되면 첫 번째 위성 노드는 LIN 버스를 사용하여 중앙 모듈에서 수신한 다음 주소를 두 번째 위성으로 보냅니다. 이 프로세스는 모든 위성이 고유한 CAN 주소를 수신할 때까지 계속됩니다.
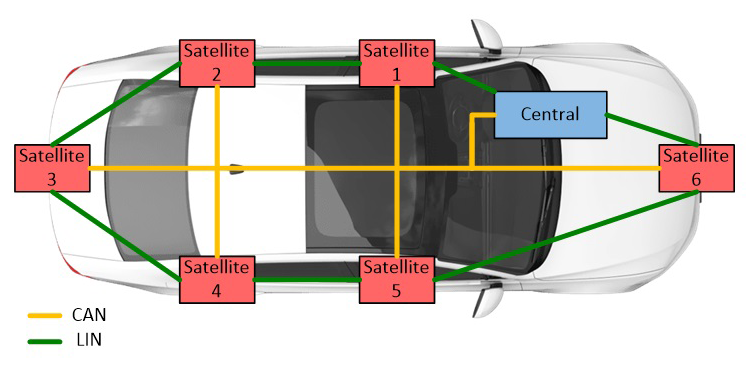
그림 3. 이 자동 주소 지정 아키텍처는 고유한 CAN ID를 위성으로 보내기 위해 LIN 데이지 체인을 사용합니다.
이 방식은 모듈당 2개의 LIN 물리 계층(PHY)이 필요합니다. 하나는 데이터 수신용이고 다른 하나는 데이터 전송용입니다. LIN PHY는 자동 주소 지정 작업 중에만 사용됩니다. 위성이 프로그래밍되면 모든 표준 데이터 통신은 차량 액세스 CAN 버스를 통해 수행됩니다. 일반적인 자동차에는 6~12개의 위성 모듈이 있을 수 있습니다. 즉, 일회성 자동 주소 지정 작업을 지원하려면 14~26개의 LIN PHY가 필요하므로 차량의 PCB BOM, 시스템 비용 및 복잡성이 크게 증가합니다.
유선 자동 주소 지정:단일 배선 방식
Texas Instruments는 전용 자동 주소 지정 LIN PHY를 MOSFET 및 몇 개의 저항으로 교체하여 각 모듈의 BOM 비용을 줄이는 대체 방법을 개발했습니다. 이 체계의 자동 주소 지정 소프트웨어의 주요 차이점은 모든 위성 모듈이 P_IN 라인에서 웨이크 신호가 수신될 때까지 CAN 버스를 무시하도록 Bluetooth SoC(시스템 오브 칩)에 대해 프로그래밍되어 있다는 것입니다. 그림 4는 블록 다이어그램을 보여줍니다.
더 큰 이미지를 보려면 클릭하세요.
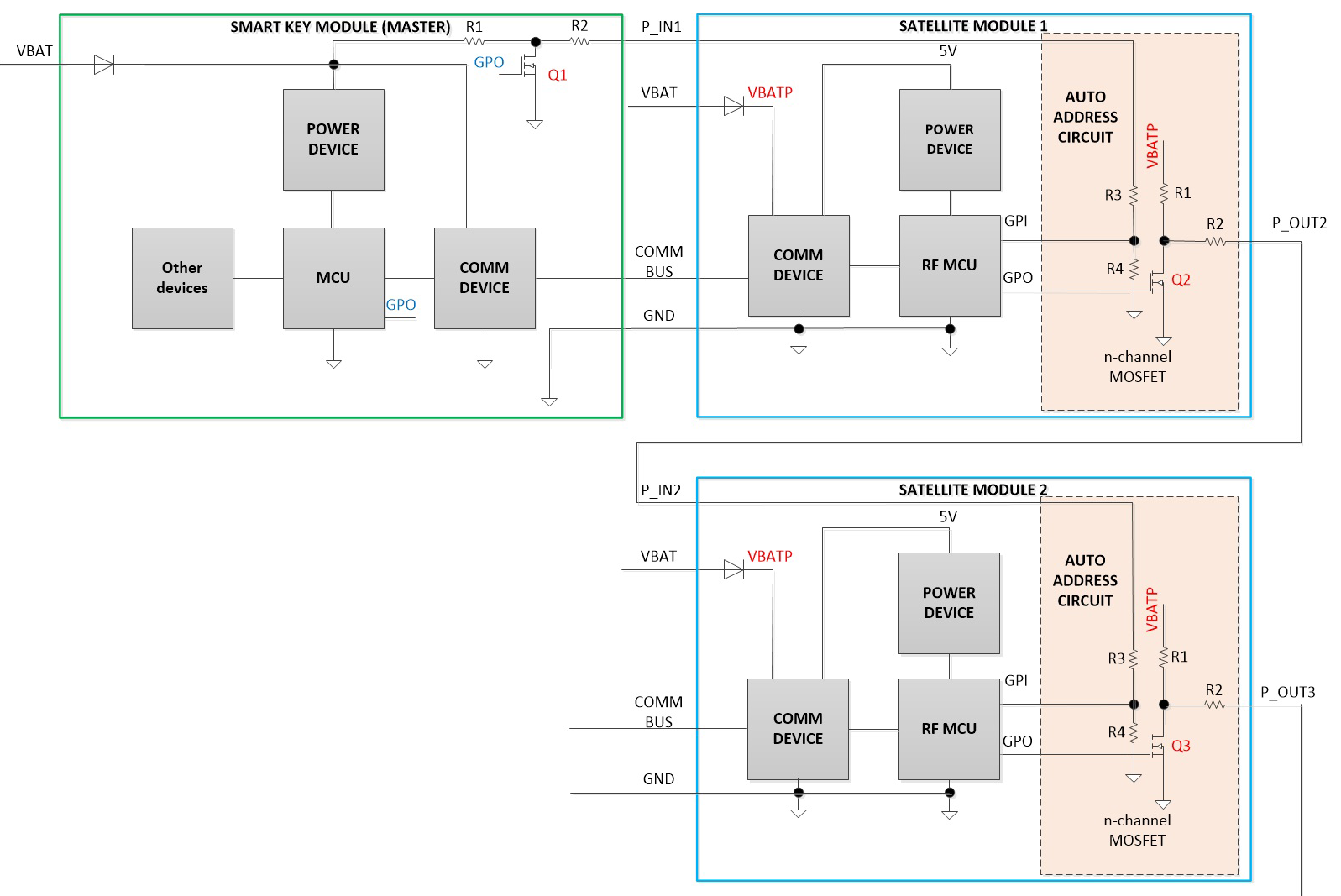 그림 4. 단일 와이어 자동 주소 지정 방법은 LIN PHY를 MOSFET 및 몇 개의 저항으로 대체합니다.
그림 4. 단일 와이어 자동 주소 지정 방법은 LIN PHY를 MOSFET 및 몇 개의 저항으로 대체합니다.
중앙 모듈은 전계 효과 트랜지스터 Q1을 사용하여 P_IN1 라인에서 PWM(펄스 폭 변조) 신호를 전송하여 자동 주소 지정 프로세스를 시작합니다. 전압 분배기를 통해 첫 번째 위성 모듈은 배터리 수준 깨우기 신호 P_IN1을 수신하여 Bluetooth MCU에 CAN 버스를 "듣도록" 신호를 보냅니다. 동시에 중앙 모듈은 CAN 버스에서 첫 번째 위성 모듈 CAN ID를 지속적으로 전송하기 시작합니다. 첫 번째 위성 모듈은 CAN ID 메시지를 수신하면 주소의 적절한 수신을 확인하기 위해 확인 메시지를 중앙 모듈로 다시 보냅니다. 확인 메시지를 보낸 후 첫 번째 위성 모듈은 PWM 깨우기 신호를 두 번째 위성 모듈에 전송하여 해당 모듈이 CAN 버스 수신을 시작하고 새 CAN ID를 수신하도록 신호를 보냅니다. 중앙 모듈이 첫 번째 위성 모듈로부터 확인 메시지를 수신한 후 CAN 버스는 두 번째 위성 모듈에서 확인 메시지를 수신할 때까지 두 번째 위성 모듈의 CAN ID 메시지를 지속적으로 전송합니다.
요약하면, 각 위성 모듈은 하나씩 CAN 버스에서 CAN ID를 수신하기 위해 다음 모듈을 깨웁니다. 중앙 모듈은 모든 모듈이 주소 지정될 때까지 주소 지정된 위성 모듈로부터 확인 메시지를 수신한 후 전송되는 다음 CAN ID를 증가시킵니다*.
개선되었지만 이 구현은 여전히 그림 5와 같이 중앙 모듈과 각 위성 모듈 사이에 배선이 필요합니다.
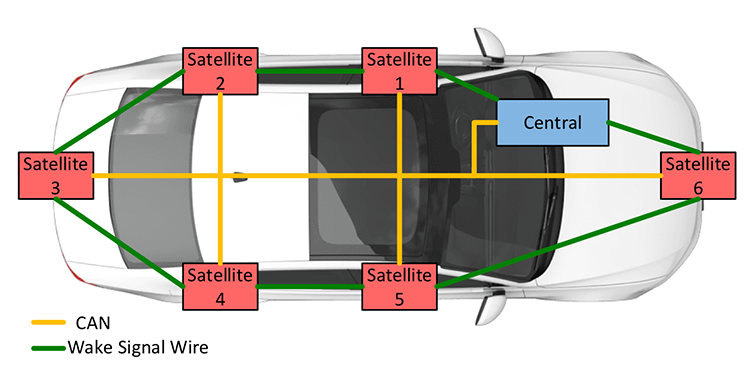
그림 5. 단일 와이어 자동 주소 지정 아키텍처는 여전히 중앙 모듈과 위성 모듈 사이에 배선이 필요합니다.
무선 자동 주소 지정/케이블 교체
Texas Instruments는 Bluetooth 지역화 기술을 사용하는 자동 주소 지정 방법도 개발했습니다. 이러한 기술을 사용하면 제조 중 및 모듈 교체 후 Bluetooth 위성 모듈에 중앙 모듈의 CAN 주소를 할당할 수 있습니다. 모듈 어드레싱 프로세스는 중앙 모듈에 가장 가까운 것으로 결정된 모듈에서 시작하여 가장 먼 모듈이 어드레싱될 때까지 가장 먼 거리에서 가장 가까운 순서로 계속됩니다. 모듈의 배치, 측정 기술 및 모듈 환경에 따라 측정 거리가 결정되므로 실제 위치는 필요하지 않습니다. 거리 dn은 측정된 거리(Bluetooth 수신 신호 강도 표시[RSSI]로부터)를 나타내며 이상적으로는 다음과 같습니다.
d1
예를 들어, 그림 6은 블록 다이어그램과 각 모듈과 중앙 모듈 사이의 거리를 보여줍니다.
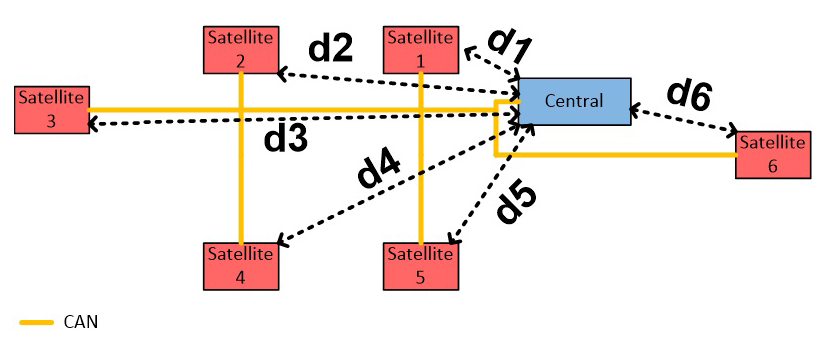
그림 6. 중앙 모듈에서 무선 자동 주소 지정 방식의 각 모듈 간의 거리를 보여주는 다이어그램입니다.
실제로 실제 거리는 특정 위성과 중앙 모듈 사이 공간의 무선 주파수(RF) 전파 특성으로 인해 측정된 거리와 다를 수 있습니다. 그러나 각 위성 모듈에서 측정된 거리가 반복적으로 일정하고 여러 모듈에서 측정된 거리 사이에 중복이 없는 한 중앙 모듈은 측정된 거리가 항상 정확하기 때문에 차량 주변의 정확한 위치를 알지 못해도 적절하게 주소를 지정할 수 있습니다. 가장 짧은 것에서 가장 먼 것까지 같은 순서로. 따라서 중앙 모듈은 이전 테스트를 통해 첫 번째 모듈이 항상 운전석 도어(CAN 주소 1)이고 두 번째 모듈이 항상 전면 범퍼(CAN 주소 2)임을 알게 됩니다.
자동 주소 지정 체계가 안정적으로 작동하도록 하려면 잠재적인 문제를 식별하고 해결할 수 있도록 각 차량 모델의 특성을 이해하기 위해 신중한 테스트를 사용해야 합니다. 예를 들어, 두 개 이상의 주소 지정되지 않은 위성 모듈 간의 중앙 모듈 거리 측정값이 비슷하거나 같으면 그림 7과 같이 이전에 주소 지정되지 않은 위성 모듈을 사용하여 중앙에서 구별할 수 없는 주소 지정되지 않은 모듈을 찾을 수 있습니다. 여러 위성 모듈을 사용하여 수행할 수도 있습니다.
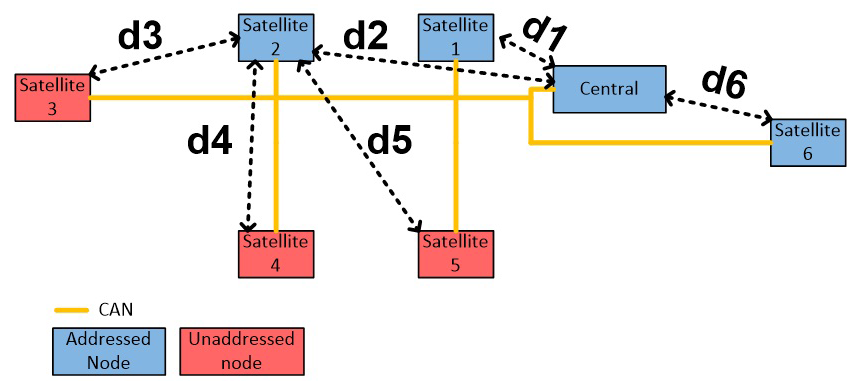
그림 7. 이전에 주소가 지정된 위성 모듈은 마스터가 구별할 수 없는 주소가 지정되지 않은 모듈을 지역화하는 데 사용할 수 있습니다.
중앙 모듈이 위성 1, 2, 6의 위치를 파악할 수 있지만 3, 4, 5가 아닌 경우 위성 모듈 2는 위성 모듈 3, 4, 5의 거리를 측정하는 데 사용됩니다. 거리 측정이 일관되고 모듈 사이의 거리 측정에 중복이 없으면 위성 모듈은 올바르게 주소 지정될 수 있으며 항상 동일한 순서로 지정됩니다.
구현
Bluetooth Low Energy 프로토콜의 GAP(Generic Access Profile) 계층과 일치하기 위해 중앙 모듈을 "스캐너"라고 하고 위성 모듈을 "광고주"라고 합니다. GAP 계층은 장치 검색, 링크 설정, 링크 종료, 보안 기능 시작 및 장치 구성을 포함하여 장치의 액세스 모드 및 절차를 처리합니다. 자동 주소 지정과 관련된 장치의 두 가지 상태는 다음과 같습니다.
광고주는 스캔 응답으로 응답합니다. 이 프로세스를 장치 검색이라고 합니다. 스캐닝 장치는 광고 장치를 인식하고 연결을 시작할 수 있습니다. 그림 8은 아래의 광고주 및 스캐너 흐름을 보여줍니다.
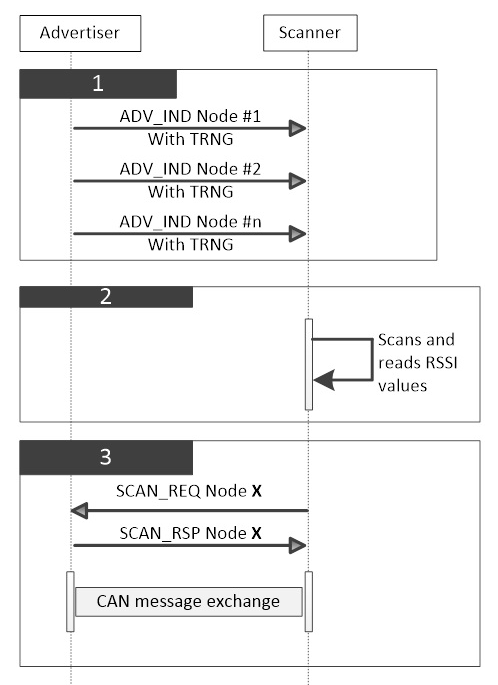
그림 8. 이 Bluetooth Low Energy 소프트웨어 다이어그램은 광고주와 스캐너 흐름을 보여줍니다.
그림 8을 보면 모든 광고주가 특정 데이터로 광고하고 광고 데이터의 일부로 사용할 실제 난수를 생성합니다. 이것은 노드 중복을 보장하지 않습니다.
스캐너는 여러 번 스캔하고 각 광고주의 RSSI 값을 읽습니다. 그런 다음 RSSI 값을 평균화하여 가장 가까운 광고주를 결정합니다.
스캐너는 가장 가까운 광고주에게 SCAN 요청을 보냅니다. 그런 다음 자동 주소 CAN 메시지를 전송하고 광고주 CAN 메시지 승인을 기다립니다.
광고주는 SCAN_REQ를 사용하여 CAN 자동 주소를 활성화합니다. 광고주가 자동 주소 CAN 메시지를 수신하면 CAN 확인 메시지를 보내고 광고를 중지합니다.
이 단계는 모든 광고주의 주소가 자동으로 지정될 때까지 반복됩니다.
결과
테스트는 12피트 하네스와 함께 차량 액세스 Bluetooth 저에너지 + CAN 위성 모듈 참조 설계를 사용하여 수행되었습니다. 각 커넥터 사이의 간격은 약 6피트였습니다(그림 9).
더 큰 이미지를 보려면 클릭하세요.
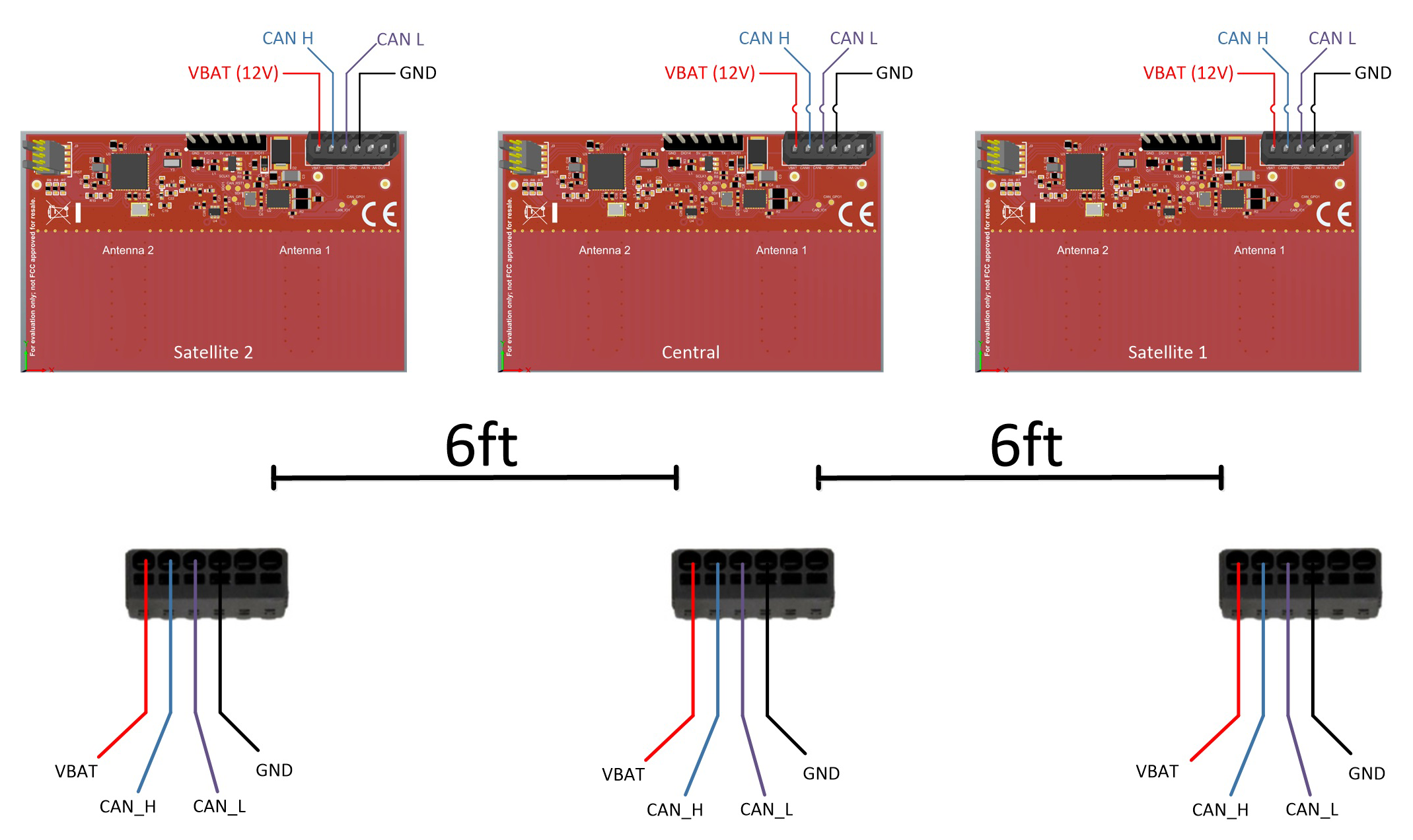
그림 9. 테스트를 위한 하드웨어 설정에는 TIDA-020032 참조 설계가 포함됩니다.
그리고 보드는 그림 10과 같이 배치되었습니다(d1 ~4ft 및 d2~8ft).
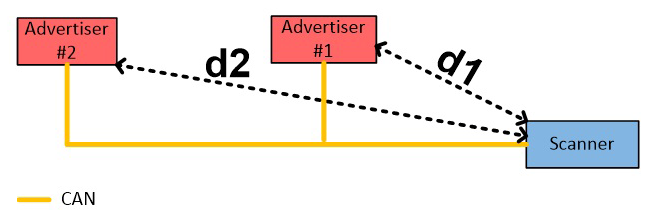
그림 10. 이 다이어그램은 테스트를 위한 하드웨어 배치를 보여줍니다.
스캐너에 대한 Bluetooth 저에너지 매개변수는 1초 스캔 기간과 250ms 스캔 창 및 간격이었습니다. 광고주에 대한 광고주의 Bluetooth Low Energy 매개변수는 100ms 간격 동안 광고되었습니다. 각 측정 기간 동안 스캐너는 노드당 10개의 RSSI 샘플을 가져오고 각 측정 세트의 평균을 내어 각 광고주의 측정된 거리 값을 생성했습니다.
세 가지 자동 주소 지정 방식 비교
이전 테스트의 결과는 이 기사에서 논의된 세 가지 자동 주소 지정 기술 각각의 상대적 지연, 안정성 및 구현 비용을 비교한 표 1에 요약되어 있습니다.
표 1. 자동 주소 지정 기술 비교
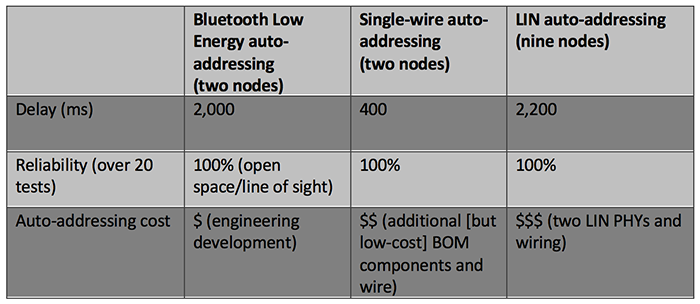
표 1은 무선 Bluetooth 저에너지 주소 지정 테스트의 결과를 앞서 논의한 두 가지 유선 자동 주소 지정 기술과 비교한 것입니다. 이러한 결과로부터 무선 기술이 유선 기술보다 약 5배 더 긴 시간이 소요되는 것으로 보입니다. Bluetooth 저에너지 네트워크의 매개변수를 추가로 개선하면 더 빠르고 더 나은 응답을 얻을 수 있습니다. 개선의 여지가 있습니다. 차량 내 각 노드의 특정 위치와 관련된 RF 전파 특성으로 인해 실제 거리는 측정된 거리와 다를 수 있으므로 추가 테스트가 필요합니다(즉, 가시선이 아닌 문제).
무선 자동 주소 지정은 재료 관점에서 가장 비용 최적화된 솔루션으로, 추가 하드웨어가 필요 없고 모듈 사이에 추가 배선이 필요하지 않습니다. 그러나 이러한 이점을 누리기 위해 시스템 설계자는 소프트웨어를 최적화하고 부정확성을 설명하기 위해 RF 성능을 제공하는 테스트를 수행해야 합니다. 유선 방식을 선호하는 경우 TI의 유선 자동 주소 지정 방법을 사용하려면 BOM에 몇 가지 작고 저렴한 구성 요소와 각 모듈 사이에 연결된 전선을 추가해야 합니다. 함께 블루투스 자동차 액세스 시스템에 대한 자동 주소 지정 기능을 구현하는 방법을 선택할 때 일련의 옵션을 제공합니다.
* 단일 와이어 자동 주소 지정 방법에 대한 자세한 내용과 테스트 결과는 Texas Instruments 자동차 액세스 Bluetooth 저에너지 + CAN 위성 모듈 참조 설계 가이드를 참조하세요.
참조
<올>>> 이 기사는 원래 다음 날짜에 게시되었습니다. 자매 사이트인 EDN.
임베디드
구성품 및 소모품 진동 센서 모듈 × 1 남성/여성 점퍼 와이어 × 3 LED(일반) × 1 Arduino UNO 또는 Arduino 메가 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 이 프로젝트에서는 Arduino를 진동 센서 및 LED와 연결합니다. 진동이 감지되지 않으면 진동 센서 출력은 0(저전압)이고, 그렇지 않으면 출력은 1(고전압)입니다. Arduino가 진동 센서에서 0(
구성품 및 소모품 Arduino Due http://www.arduino.cc에서 × 1 3.2 Arduino용 실드가 있는 TFT 400*240 SD 터치 모듈 마감 Elechouse의 것을 사용했습니다 × 1 RTC DS3231 Ebay의 실시간 시계 × 1 GPS 유블럭스 네오 6M Ebay의 GPS 모듈 × 1 Arduino용 PS2 조이스틱 Ebay에서 다시 × 1 DHT22 온도 센서 온도 및 습도 센서 × 1 HC-0