

사물 인터넷 기술

산업 제조
스위치 모드 컨버터 원리의 기본 사항을 이해하면 설계자가 애플리케이션에 가장 적합한 인덕터를 선택하는 데 도움이 됩니다. Signal Transformer의 엔지니어링 이사인 Mitchell Rhine이 작성했습니다.
기존 선형 전압 조정기에는 한 가지 주요 단점이 있습니다. 패스 트랜지스터에서 강하된 전압에 부하 전류를 곱한 값은 낭비되는 전력과 같습니다. 선호하는 옵션은 종종 스위치 모드 DC/DC 컨버터입니다. 여기서 전력 트랜지스터는 몇 가지 추가 필터링을 통해 필요한 출력 전압을 제공하는 듀티 사이클로 계속 스위칭됩니다.
이 구성에서 트랜지스터는 전압 강하가 없는 ON 상태이거나 전류가 흐르지 않는 OFF 상태입니다. 이는 상태 간을 전환할 때 전력 손실이 0으로 낮아지는 경향이 있어 최대 95%의 효율을 제공하는 반면 선형 컨버터는 일반적으로 약 50%를 제공한다는 것을 의미합니다. 스위칭 컨버터는 토폴로지가 강압(소위 "벅"), 승압("부스트") 또는 반전("벅-부스트") 모드에서 작동할 수 있다는 점에서 또 다른 주요 이점이 있습니다.
스위치 모드 컨버터 원리에 대한 기본적인 이해는 필요한 인덕터를 선택하는 데 도움이 됩니다. 이 기사에서는 "연속 모드"에서 작동하는 매우 인기 있는 고정 주파수 벅 컨버터를 중심으로 몇 가지 기본 구성에 중점을 둘 것입니다.
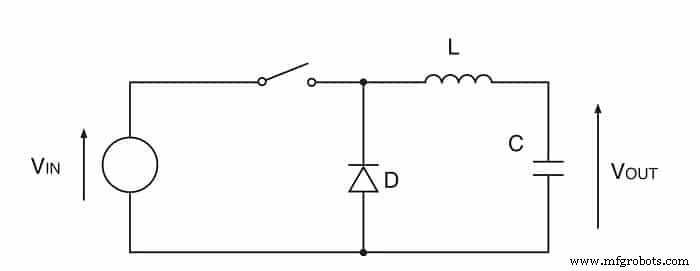
그림. 1:간단한 스위칭 DC/DC 컨버터.
기본 벅 컨버터는 스위치, 인덕터, 커패시터 및 다이오드로 구성됩니다(그림 1 ). 이상적인 스위치와 다이오드를 가정하면 Vsw =0 및 Vd =0, 변환기 작동에 대한 설명을 단순화합니다. 실제 설계 사례에서 필요한 인덕턴스 값 L, 예상 듀티 사이클 D 및 작동 효율 Vsw를 정확하게 결정하기 위해 및 Vd 0이 아닌 것으로 간주되어야 하며 변환기 회로에 대한 영향이 포함되어야 합니다.
스위치가 ON이면 다이오드가 꺼지고 램핑 전류가 입력에서 출력으로 직접 흐릅니다. 스위치가 꺼져 있을 때 인덕터 양단의 전압은 전류 흐름을 유지하려는 인덕턴스로 인해 극성을 반전시킵니다. 이렇게 하면 "캐치" 다이오드가 켜지고 스위치가 다시 켜지고 주기가 반복될 때까지 전류가 감소합니다. 램프 ON 전류는 인덕터 코어 자화를 증가시켜 인덕터에 에너지를 저장하고, 이는 전류 램프 다운에 따라 OFF 주기 동안 반환됩니다.
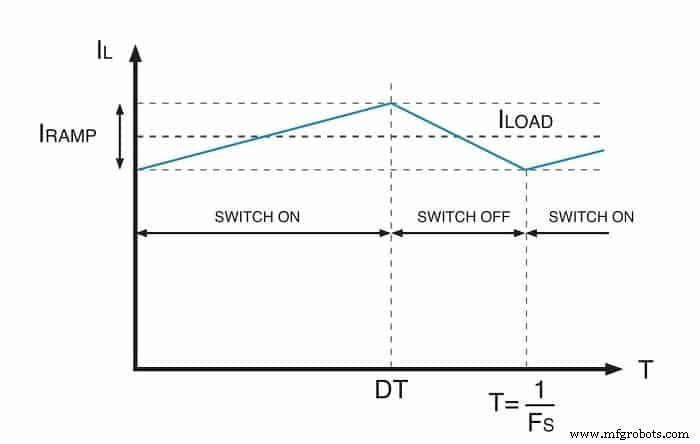
그림. 2:스위칭 DC/DC 컨버터의 램핑 파형.
벅 컨버터의 경우 인덕터에 흐르는 전류의 파형은 과 같다. 2 . 여기에는 평균 DC 구성 요소와 주기적으로 증가 및 감소하는 AC 구성 요소가 포함됩니다. DC 전류는 DC 부하 전류 Iload와 같습니다. . 정상 상태 조건에서 사이클 종료 시의 인덕터 전류는 사이클 시작 시의 전류와 동일합니다.
제어된 스위칭 작업 결과
V아웃 =D * Vin (식 1)
D는 D =ton 과 같은 듀티 사이클입니다. /(ton + t꺼짐 ).
스위칭 주파수는 fsw에 의해 결정됩니다. =1/(ton + t꺼짐 ), ton =D/fsw .
ON 시간 동안 회로에서 발생하는 모든 전압 강하를 합산하고 Vsw =0, 결과는
V인 – V인드 – V아웃 =0(식 2)
이제 Vind 를 대체하면 =L * di/dt, di는 현재 램프 Iramp의 크기와 유사합니다. 및 dt ON 시간 ton , 이렇게 하면
L * I램프 =(Vin – V아웃 ) * ton (수학식 3)
이는 식 3의 오른쪽이 주어진 입력-출력 전압 차이에 대해 일정하기 때문에 중요한 결과를 가져옵니다. 이는 결과 스위칭 주파수와 ton 값에 대해 동일함을 의미합니다. . 더 큰 인덕턴스 값 L은 더 작은 램핑 전류 성분과 같으며 더 작은 인덕턴스 값은 더 큰 전류 램프로 이어집니다. 이것을 극도로 유도하면 인덕턴스가 매우 작게 선택되면 전류 램프가 너무 커서 저부하 전류 조건에서 인덕터를 통해 흐르는 총 전류가 스위칭 기간의 일부 동안 0으로 떨어질 수 있습니다. . 이 상태를 불연속 모드라고 합니다.
명심해야 할 또 다른 중요한 고려 사항이 있습니다. 일부 애플리케이션에서 매력적일 수 있는 더 작은 인덕턴스는 더 큰 인덕터 램프 전류로 이어지며, 이로 인해 출력 전압에서 더 높은 리플이 발생합니다. 큰 I램프 또한 인덕터의 AC 코어 손실을 증가시킵니다. 일반적인 지침으로 나는램프 최대 부하 전류에 비해 작아야 합니다. 이것은 주어진 시스템 설계에 대한 인덕턴스 값 L을 결정합니다.
이제 적절한 인덕턴스 값을 선택하는 것과 관련된 주요 사양을 살펴보겠습니다. 인덕터를 통과하는 최대 피크 전류입니다. 정상 상태 작동에서는
I최대 =Iload_max + I램프 /2 (방정식 4)
방정식 3을 보면 Iramp Iload와 독립적입니다. . I최대를 결정하려면 , 내가 램프 Vin의 다른 값에 따라 달라집니다. 인덕터 L의 값을 결정한 후.
모든 전압 강하를 합산하고 Vd =OFF 시간 동안 0, 결과는
V와 – V아웃 =0(식 5)
Vin 고려 =L * di/dt, di는 현재 램프 Iramp의 크기입니다. dt는 OFF 시간 toff입니다. , 우리를
로 이끕니다.I램프 =V밖 * t꺼짐 /L (수식 6)
Vout인 경우 일정함, I램프 t꺼짐 일 때 최대값입니다. 도 최대입니다. 이것은 Vin 일 때 발생합니다. 최대값이며 이 조건이 I램프를 결정합니다. 및 최대 피크 인덕터 전류(방정식 4).
인덕턴스 값이 결정되고 최대 전류가 알려지면 마침내 적절한 인덕터 유형을 선택하게 됩니다. 차폐 및 낮은 EMI 인덕터는 새로운 IoT 설계의 경우와 같이 밀집된 기판에 적합한 선택입니다. 이 제품의 장점은 자속이 인덕터 본체 내에 포함되어 있어 주변 PCB 트레이스와 구성 요소에 대한 복사 영향이 낮다는 것입니다.
예를 들어 Signal Transformer의 SCRH 계열 자기 차폐 부품은 1.0μH ~ 180μH 범위의 인덕턴스 값, 0.15A ~ 5.0A의 포화 전류, 1.9mm ~ 4mm의 높이로 사용할 수 있습니다. 더 큰 인덕턴스 값이 필요한 경우 SCxxxxC 시리즈는 0.045A ~ 8A의 포화 전류 및 2.92mm ~ 7.62mm의 높이로 10µH ~ 1mH의 값을 제공합니다. 다른 시리즈는 로우 프로파일 치수를 포함하여 최고의 효율과 강력한 전력 처리를 위한 비차폐 인덕터뿐만 아니라 고전류 애플리케이션에 사용할 수 있습니다.
추천 이미지 출처:Signal Transformer
사물 인터넷 기술
좋은 디자인이 성공과는 거리가 멀다면 좋은 CNC 공장을 찾는 것은 성공에서 한 걸음 떨어져 있습니다. 이 시점에서 꼭 이루고 싶은 멋진 디자인이 있습니다. 다음 단계는 무엇인가요? CNC 공장을 찾으십시오. CNC 공장을 찾을 때 필요한 사항을 명확히 하십시오 요구 사항을 분석하고 설계에 가장 적합한 CNC 공장을 찾기 위해 몇 가지 방법을 시도하십시오. 이 단계를 시작하기 전에 설계에 대한 2D 및 3D 도면을 만들어야 합니다. 허용오차, 재료, 표면 마감 및 설계의 외관 기능에 대한 도면은 도면에 표시될 수 있습니다. 설계를
제조업을 위한 로봇을 선택하는 방법을 모르십니까? 많은 모델과 브랜드에 압도되었나요? 로봇이 시간을 낭비할까? 시장에는 수많은 산업용 로봇이 있으며 점점 더 많은 제품이 출시되고 있습니다. 매년 수십 개의 로봇 제조업체가 더 새롭고 더 나은 모델을 내놓고 있습니다. 완전히 새로운 범주의 산업용 로봇이 몇 년에 한 번씩 현장에 등장하기도 합니다. 모든 로봇을 검색할 시간이 없습니다! 그렇다면... 귀하의 필요에 맞는 것을 어떻게 찾습니까? 대부분의 제조업체와 마찬가지로 이미 시간이 부족하기 때문에 로봇을 고려하고 있을