

사물 인터넷 기술

산업 제조
농부들은 예방 농업에서 예측 농업으로 전환하기 위해 센서 데이터를 수집하고 있습니다.
산업혁명은 처음부터 생산 공정 자동화에 중점을 두었습니다. 인더스트리 4.0 시대에 들어서면서 대부분의 산업 프로세스는 일반적으로 수집, 전송, 저장, 분석 및 마지막으로 표시의 5단계 데이터 조작을 포함하는 데이터 중심이 되었습니다. 이 마지막 단계는 인간을 루프에 유지하는 것이지만 데이터를 일부 작동 장치에 피드백하여 프로세스를 로봇 공학 영역으로 가져올 수도 있습니다.

농업은 지난 2세기 동안 산업화의 영향을 받지 않았으며 최근에는 농업 4.0이 추진력을 얻었습니다. 산업 생산이 데이터 관리로 전환된 것처럼 농업은 이제 그 경로를 따르고 있습니다. 전통적으로 산업 부문에 서비스를 제공한 회사는 이제 농업 부문에 유사한 데이터 중심 접근 방식을 제공하며 농업 장비 제조업체가 산업 장비 제조로 확장하는 것을 보고 있습니다. 농업은 종종 전통적인 산업 제조 산업과 관련하여 구조화되지 않은 환경으로 특징지어지지만 새로운 데이터 중심 기술의 다양성은 농업이 자동차 또는 항공 우주와 같은 방식으로 시범 운영되는 산업이 되도록 돕고 있습니다. 농부는 다른 엔지니어와 마찬가지로 엔지니어가 되었습니다.
이 모든 것은 1990년대에 스웨덴 제조업체인 DeLaval과 네덜란드에 기반을 둔 Lely와 같은 착유기인 고가치 낙농 산업을 위한 최초의 자동화 장비에서 시작되었습니다. 동시에 일본에 본사를 둔 Satake와 스위스에 본사를 둔 Bühler와 같은 회사에서 곡물, 특히 쌀을 위한 광학 선별기를 개발했습니다. 이러한 분류 기술 중 일부는 포도밭 포도와 같은 고급 농산물을 위해 다시 현장에서 사용되었습니다. 프랑스 남부의 Pellenc는 이러한 로봇 장비를 개발하여 농부들을 데이터 과학자로 탈바꿈시켰습니다.
실제로 이 새로운 세대의 농부들을 위한 자동화가 이루어지면 그들은 수확량을 수동적으로 보는 것이 아니라 농산물의 품질과 양을 개선하기 위해 능동적으로 행동하는 추가 단계를 밟을 기회를 갖게 되었습니다. 과거의 소규모 영농 경영이 농부의 눈과 직관으로 일상 활동을 모니터링할 수 있었던 것과 달리 오늘날의 대규모 영농은 더 이상 인간의 감각에 의존할 수 없습니다. 데이터 기술은 농장을 올바른 방향으로 이끄는 데 핵심이 되었습니다. 목축, 작물 생산 또는 와인과 같은 고급 생산을 위한 것이든 데이터는 농업 4.0의 초점입니다.
농업에서의 카메라 활용
농업 데이터 관리의 가장 좋은 예 중 하나는 드론을 사용하여 필드를 모니터링하는 것입니다. 파리에 기반을 둔 Parrot은 주로 미국 자회사인 MicaSense 덕분에 이 영역의 핵심 업체입니다. 그러나 프랑스 회사는 지난 1월 미국에 기반을 둔 데이터 수집, 분석, 항공 영상 서비스 및 드론 회사인 AgEagle Aerial에 MicaSense를 2,300만 달러에 매각하기로 합의했다고 발표했습니다. MicaSense는 다양한 파장을 사용하여 NDVI(정규화 차이 식생 지수) 맵을 계산하는 카메라를 개발했으며, 이는 작물 성장을 모니터링하고 문제 영역을 식별하는 데 허용되는 방법이 되었습니다. 최첨단 방법론은 이제 NDVI 지도를 트랙터에 다운로드하여 밭에 배달되는 비료를 조정하는 것입니다.
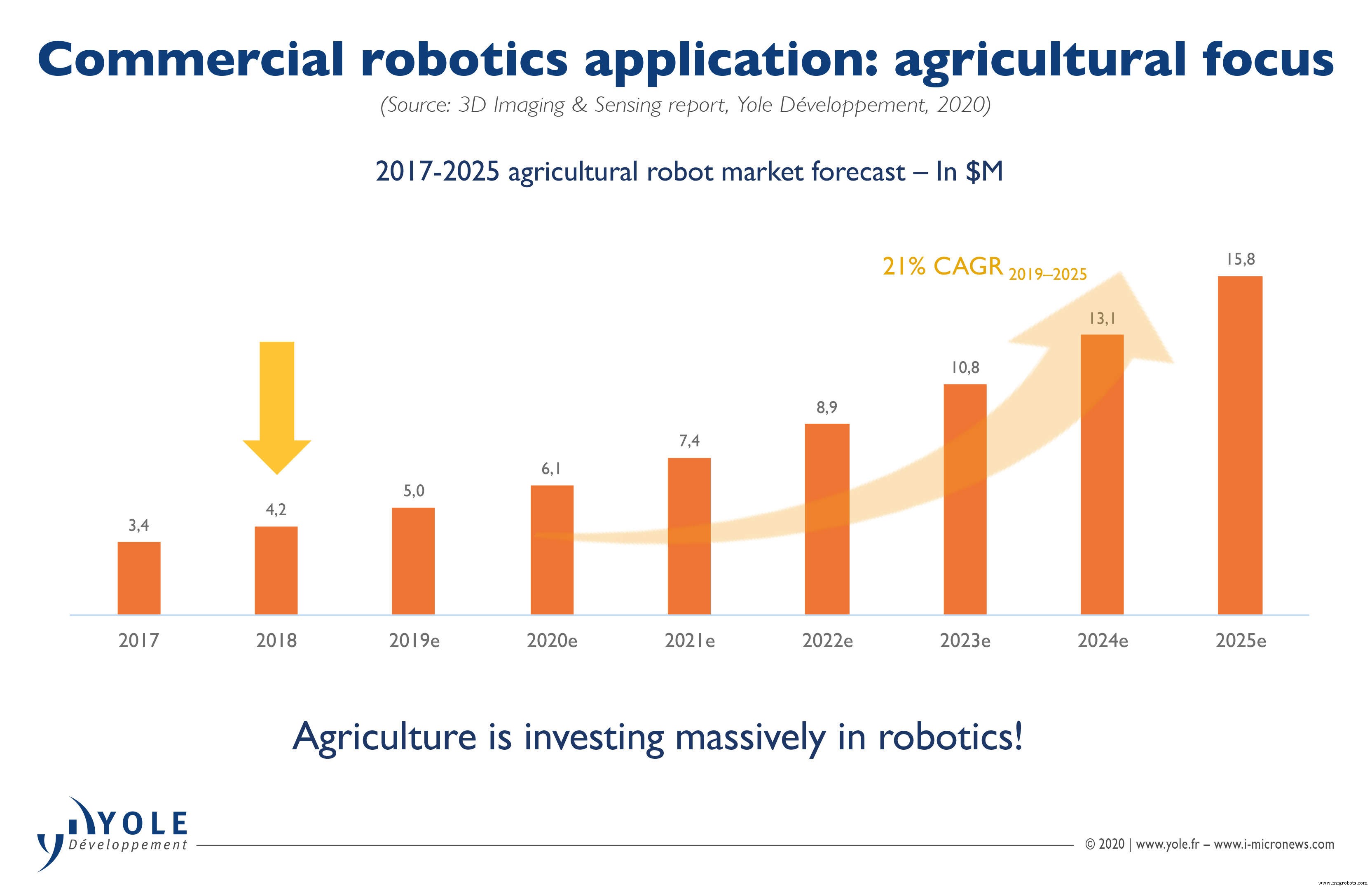
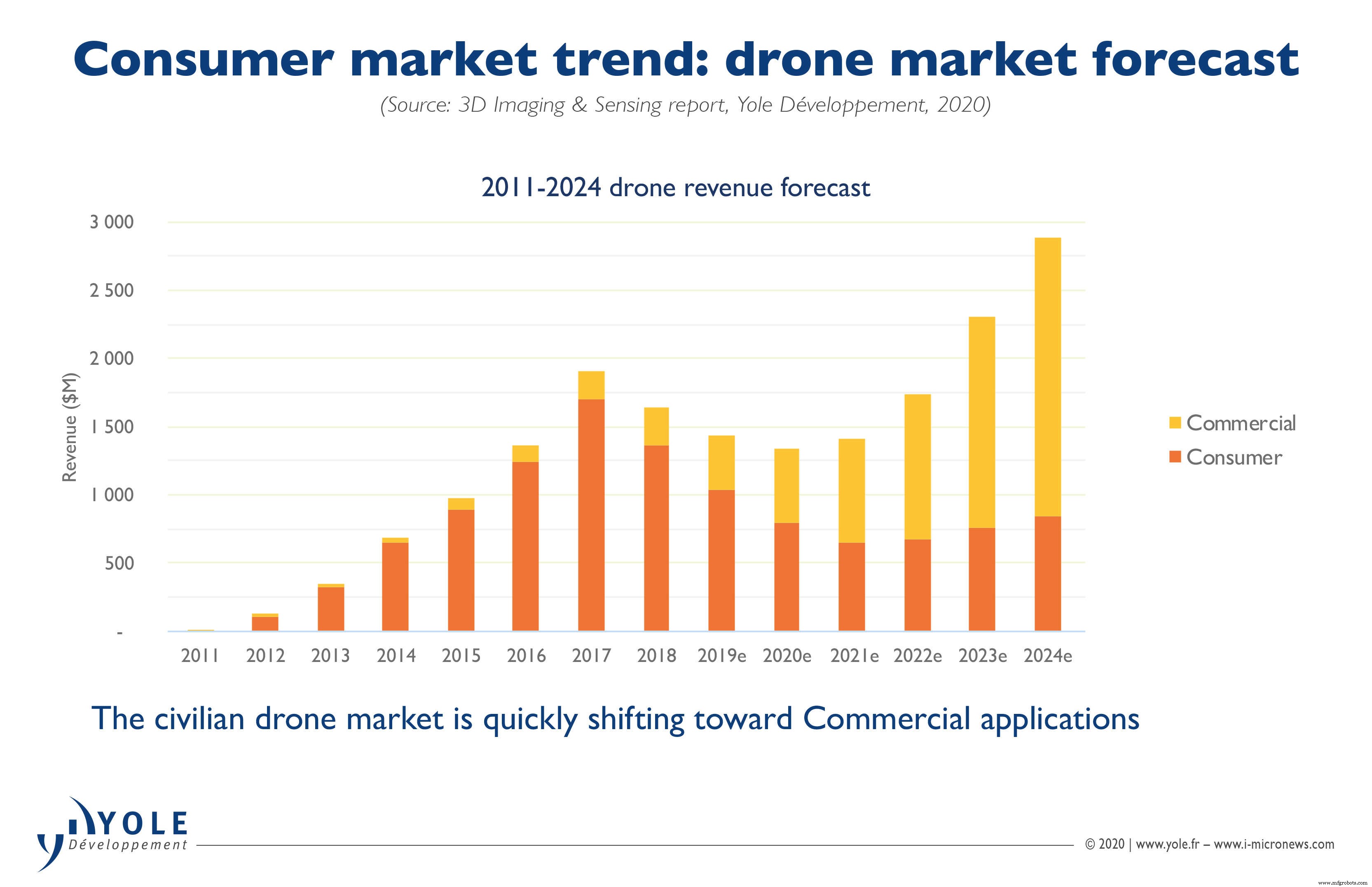
미국 연방항공청(FAA)은 최근 미국에 등록된 160만대의 드론 중 7%가 농업용이라고 보고했다. 이는 미국에서 100,000개 이상의 농업용 드론을 나타냅니다. 전체 상업용 드론 시장의 작은 부분만을 차지하지만 농업용 드론 부문은 상당한 수익 창출 현실이 되었습니다. 데이터 수집은 점점 더 로봇의 역할이 되고 있습니다. 자동화된 헛간, 농업용 드론 또는 자율 트랙터의 경우 데이터는 더 이상 새로운 석유가 아닙니다. 새로운 작물입니다.
농업에서의 IMU 활용
스마트 농업에 사용되는 로봇은 항공(드론)과 육상(트랙터 및 수확기 등)의 두 가지 주요 범주로 나뉩니다. 두 경우 모두 로봇의 기능은 다양한 유형의 센서에 의존합니다. 이러한 기능 중 하나는 탐색 및 안정화를 위한 관성 시스템으로, 고성능, 신뢰성 및 정확도에 대한 요구 사항을 충족해야 합니다. 낮은 바이어스 드리프트; 낮은 바이어스 불안정성; 그리고 합리적인 가격으로 온도에 따른 안정적인 성능을 제공하여 투자를 정당화합니다.
전체 크기 이미지를 보려면 클릭하세요.
(출처:Yole Développement)
전체 크기 이미지를 보려면 클릭하세요.
(출처:Yole Développement)
드론은 (카메라를 통해) 농작물의 상태와 상태를 모니터링하는 것을 가능하게 하며 일반적으로 보다 값비싼 비행기 기반 시비 솔루션의 대안으로 중소 밭(20헥타르 미만)의 시비에 사용됩니다. 카메라가 무엇을 캡처하는지 알아야 하기 때문에 카메라가 지면을 향할 때 드론 탐색 및 안정화가 매우 중요합니다. 10미터 높이에서 5° 오차는 80cm 오차를 초래합니다.
GPS는 드론 탐색에 충분히 정확할 수 있지만 카메라 안정화를 위해서는 강력한 IMU(관성 측정 장치) 솔루션이 필요합니다.
농업용 육상 로봇 차량은 농작물 줄을 탐색하고 식물 손상을 방지하기 위해 센티미터 수준의 정밀도가 필요합니다. 이 기계의 대부분은 정확한 GPS 시스템을 갖추고 있어 운전자가 차량의 위치를 알 수 있게 하고 이중 시비 또는 시비 부족을 방지합니다. 그러나 로봇이 예를 들어 신호가 손실될 수 있는 나무 아래에서 운전하는 경우 GPS가 제한될 수 있습니다. IMU 또는 AHRS(Atitude-Heading-Reference System) 솔루션이 필요한 이유가 바로 여기에 있습니다. MEMS(Microelectromechanical Systems)를 기반으로 하는 IMU는 고성능 및 낮은 크기, 무게, 전력 및 비용(SWAP-C)에 대한 육상 기반 애플리케이션 요구 사항을 충족할 수 있도록 잘 갖춰져 있습니다.
사물 인터넷 기술
얼핏 생각하면 agtech는 모순된 것처럼 보입니다. 농업에는 작물 재배가 포함됩니다. 식물은 태양, 물, 토양 영양소와 성장 시간에 접근할 수 있는 적절한 계절에 심어야 한다는 점에서 실제 지름길이나 빠른 길은 없습니다. 그에 비해 기술은 속도, 신속한 프로토타입 제작 및 적시 배포에 관한 것입니다. 그러나 agtech는 실제로 농업과 차세대 연결된 기술의 두 가지 관행 사이에서 진화하는 연결점입니다. 참조: Platagon은 두바이 대학과 협력하여 도시 농업 센터를 만들었습니다. 농업은 여러 세대에 걸쳐 이어져 내려오는
머신 비전 카메라, 보정되지 않은 센서 또는 예측할 수 없는 그림자의 결함은 산업용 AI 시스템에서 잠재적으로 비용이 많이 들고 위험한 오류로 이어질 수 있습니다. 그러나 연구자들은 오류 가능성을 줄이기 위해 취할 수 있는 간단한 조치뿐만 아니라 오류 방지 알고리즘을 개발하고 있습니다. 인공 지능은 기본 퍼셉트론 인공 신경망 이상으로 발전했지만 오류는 여전히 문제로 남아 있습니다. 픽사베이 제공 이미지 사용 인공 지능을 위한 산업용 애플리케이션 로봇 공학 플랫폼, 자재 취급, 포장, 머신 텐딩, 조립, 검사 및 BAS