

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 4 |
2021년 업데이트
새 버전의 페달에는 HID 인터페이스와 개선된 디자인이 있습니다. 고급 홀 효과 센서 모듈은 매우 정밀한 제어를 제공합니다. 내 웹사이트에 자세히 나와 있습니다.
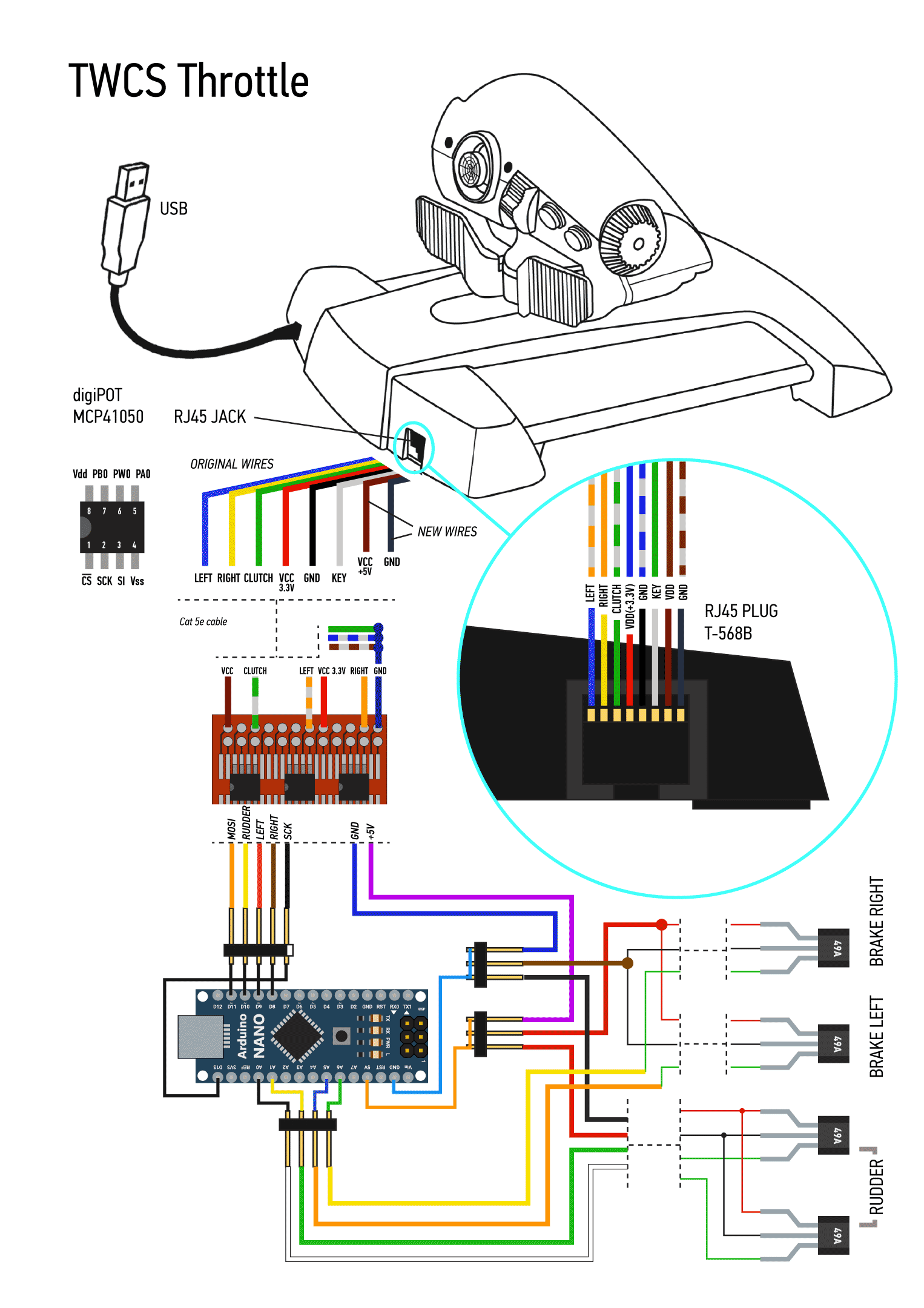
안녕하세요, 비행이 끓고 있습니다! 나는 항공기 시뮬레이터용 페달을 발명하고 만들었는데, 그 주요 기능은 Arduino에 의해 수행됩니다. 그리고 저는 이 발전을 여러분과 정말로 공유하고 싶습니다. 그런 페달은 이틀이면 만들 수 있는 것으로 밝혀졌는데, 만드는 과정을 설명하려면 2주가 걸린다. 그래서 이 과정을 최대한 자세하게 보여주는 동영상을 여러 개 만들었습니다.
페달 만들기
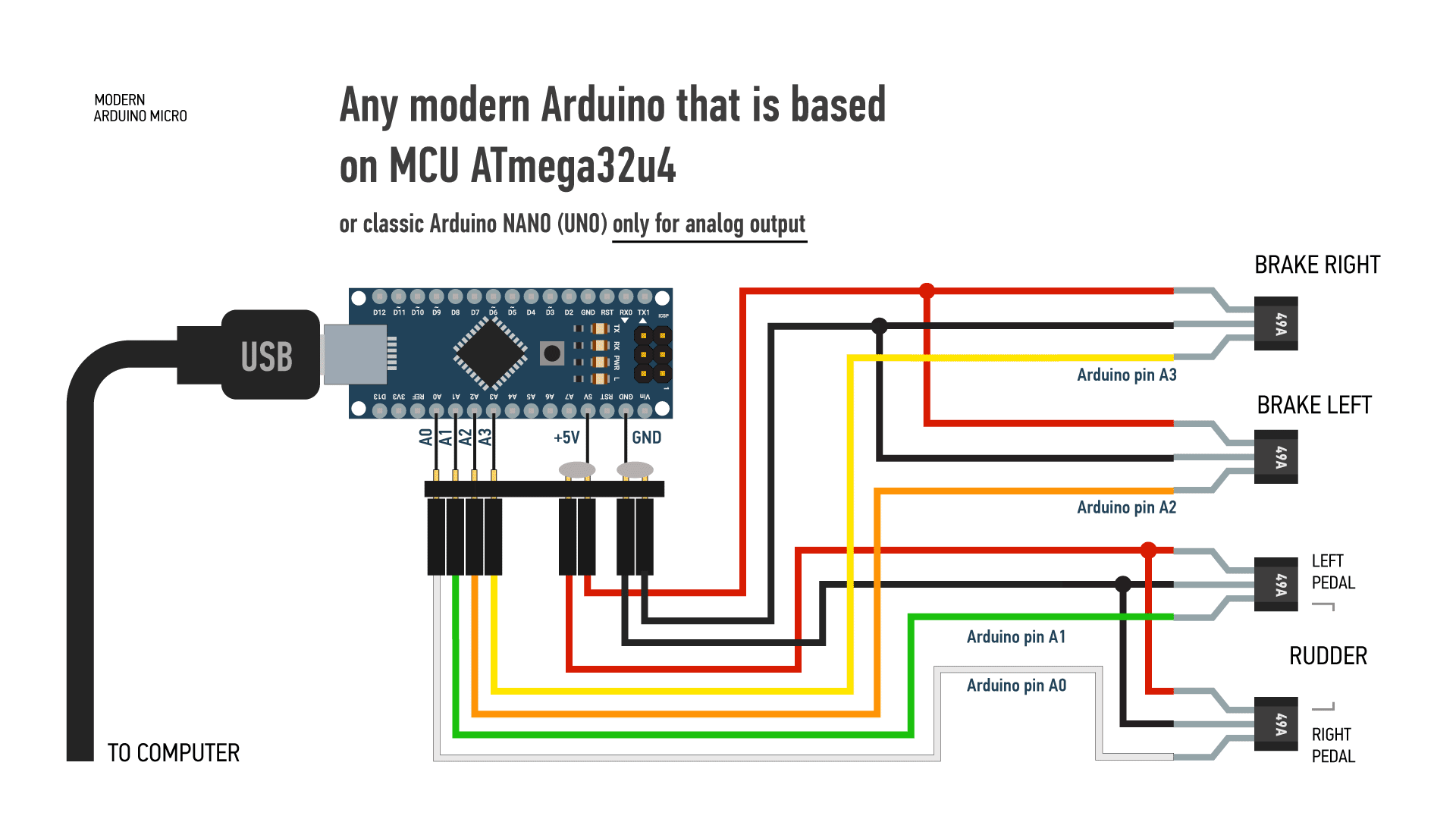
Arduino는 두 가지 방법으로 비행 시뮬레이터에 연결할 수 있습니다. 여기에서 ArduinoJoystickLibrary와 Arduino Micro 보드를 사용한 디지털 연결 링크
페달을 아날로그 연결로 연결합니다. 그리고 여기에 주어진 스케치는 이 연결 방법을 나타냅니다.
회로를 만들고 센서를 구성하는 이 두 가지 방법은 다음 비디오에 나와 있습니다.
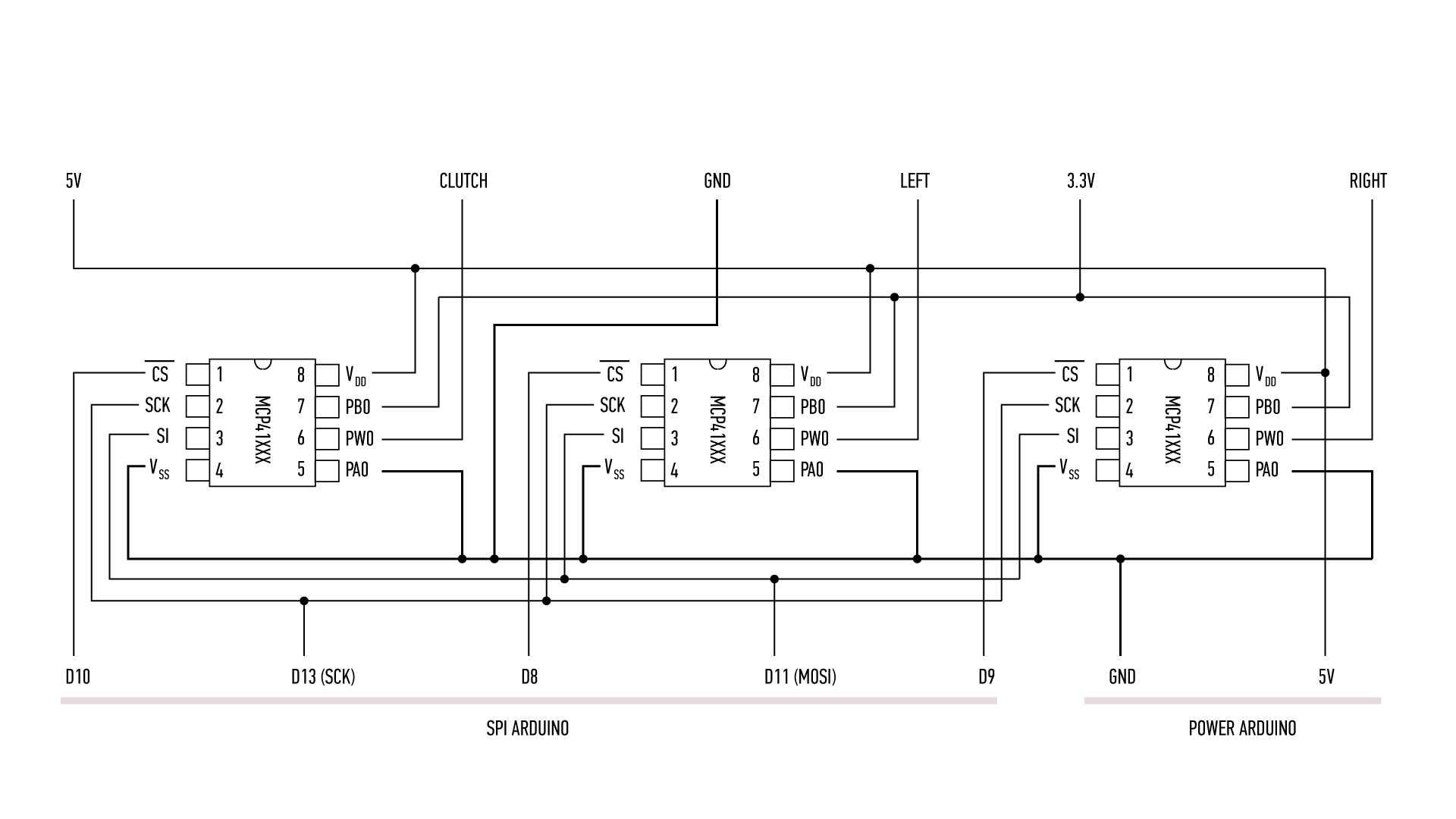
센서 및 전자 제품
이 디자인에 대한 귀하의 의견에 매우 관심이 있습니다. 의견을 남겨 주십시오.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include#define CS_RUDDER 10 #define CS_LEFT 8 #define CS_RIGHT 9 #define SENSOR_LEFT_PEDAL A6#define SENSOR_RIGHT_PEDAL A5#define SENSOR_RIGHT_PEDAL A5#define SENSOR_RUDDER_LEFT A0#define SENSOR_RUDDER_LEFT A0#define SENSOR_RUDDER_LEFT_R val_brake_right, remap_brake_left, remap_brake_right;int tuning_rudder =128;// int tuning_left_brake =255;// int tuning_right_brake =255;void setup() { Serial.begin(9600); SPI.begin(); 핀모드(CS_RUDDER, OUTPUT); 핀모드(CS_LEFT, OUTPUT); 핀모드(CS_RIGHT, OUTPUT); } 무효 루프() { // ------------------------------------------ -------------- // 러더 페달 -128 --- x --- 128 // -------------------- ------------------------------------ // 센서 RUDDER LEFT를 읽고 다시 매핑 val_left =analogRead(SENSOR_RUDDER_LEFT); if (val_left <=950) { remap_left =map(val_left, 30, 870, -128, 0); // -40 } 그렇지 않으면 remap_left =0; // 제한 설정 RUDDER LEFT if (remap_left> 0) remap_left =0; if (remap_left <=-128) remap_left =-128; // RUDDER RIGHT 센서를 읽고 다시 매핑 val_right =analogRead(SENSOR_RUDDER_RIGHT); if (val_right <=950) { remap_right =map(val_right, 0, 820, 132, 0); // -50 } 그렇지 않으면 remap_right =0; // 제한 설정 RUDDER RIGHT if (remap_right <0) remap_right =0; if (remap_right>=127) remap_right =127; 방향타 =remap_left + remap_right; if (remap_left ==0) {tuning_rudder =tuning_rudder + 128; } else { 튜닝 방향타 =abs(tuning_rudder - 128); } // ----------------------------------------------- --------- // 제동 // ------------------------------------ -------------------- val_brake_left =analogRead(SENSOR_LEFT_PEDAL); if (val_brake_left <=328) { remap_brake_left =map(val_brake_left, 200, 328, 0, 255); } 그렇지 않으면 remap_brake_left =255; if (remap_brake_left <0) remap_brake_left =0; val_brake_right =analogRead(SENSOR_RIGHT_PEDAL); if (val_brake_right <=328) { remap_brake_right =map(val_brake_right, 200, 328, 0, 255); } 그렇지 않으면 remap_brake_right =255; if (remap_brake_right <0) remap_brake_right =0; /* // ARDUINO SETUP // 중립 센서 설정 Serial.print(val_left); Serial.print(" | " ); Serial.println(val_right); 지연(400); // 출력 설정 Serial.print(remap_brake_left); Serial.print(" | " ); Serial.println(remap_brake_right); Serial.print(" | " ); Serial.print(방향타); Serial.print(" | " ); Serial.println(tuning_rudder); 지연(400);*/ // ------------------------------------------ --------------- // 데이터를 digiPOT로 보내기 // --------------------------- -------------------------- digitalWrite(CS_RUDDER, LOW); SPI.transfer(0b00010001); SPI.transfer(tuning_rudder); 디지털 쓰기(CS_RUDDER, HIGH); 지연(5); // 데이터 시간 평활화를 위한 지연 digitalWrite(CS_LEFT, LOW); SPI.transfer(0b00010001); SPI.transfer(remap_brake_left); 디지털 쓰기(CS_LEFT, HIGH); 지연(5); 디지털 쓰기(CS_RIGHT, LOW); SPI.transfer(0b00010001); SPI.transfer(remap_brake_right); 디지털 쓰기(CS_RIGHT, HIGH); 지연(5);}
제조공정
이 튜토리얼에서는 Arduino 기반 RC Hovercraft를 구축하는 방법을 배웁니다. 프로펠러를 포함한 호버크라프트 부품의 설계 및 3D 프린팅부터 전자 부품 연결 및 Arduino 프로그래밍까지 전체 제작 과정을 보여드리겠습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 호버크라프트를 제어하기 위해 이전 비디오 중 하나에서 만든 DIY Arduino 기반 RC 송신기를 사용했습니다. 오른쪽 조이스틱은 스러스트 모터 후면에 러더를 위치시키기 위한 서보 모터를 제어하기 위해 설정하고, 전위차계
튜토리얼에서 우리는 DIY Arduino RC 송신기를 만드는 방법을 배울 것입니다. 종종 내가 만드는 프로젝트에 무선 제어가 필요하므로 거의 모든 작업에 사용할 수 있는 이 다기능 라디오 컨트롤러를 만들었습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 이제 수신기 측에서 약간의 조정만 하면 모든 Arduino 프로젝트를 무선으로 제어할 수 있습니다. 이 송신기는 RC 장난감, 자동차, 드론 등을 제어하기 위한 상업용 RC 송신기로도 사용할 수 있습니다. 이를 위해서는 상용 RC 장치를 제어하기