

산업용 로봇

산업 제조
어떤 후처리기를 선택해야 할지 모르십니까? 완벽한 로봇 후처리기를 선택하는 5단계는 다음과 같습니다.
후처리 프로세서는 오프라인 프로그래밍 소프트웨어와 로봇 사이의 다리입니다.
올바른 후처리기를 선택하면 프로그램이 기본적으로 작동합니다. 실제 로봇은 시뮬레이션에서와 똑같이 움직입니다. 그러나 잘못된 후처리기를 선택하면 로봇이 이상하게 움직이거나 잘못된 방향으로 움직이거나 전혀 움직이지 않을 수 있습니다.
RoboDK는 선택할 수 있는 다양한 후처리기를 제공합니다. 후처리기의 작동 방식, 올바른 후처리기를 선택하는 방법, 제공된 후처리기가 귀하에게 정확히 맞지 않는 경우 자신의 후처리기를 사용자 지정하거나 만드는 방법에 익숙해지는 것이 좋습니다.
이 문서에서는 RoboDK의 로봇 후처리기에 대해 알아야 할 모든 것을 설명합니다.
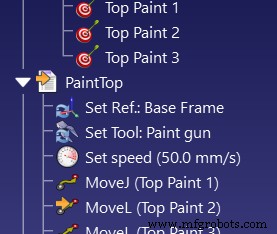
대부분의 로봇 프로그램에는 반복적으로 사용되는 동일한 기본 명령이 포함되어 있습니다. 가장 일반적인 세 가지는 다음과 같습니다.
오프라인 프로그래밍 소프트웨어는 모든 로봇에 적용할 수 있는 이러한 명령(및 기타)의 일반화된 버전을 사용하여 프로그램을 만듭니다.
문제는 제조업체마다 로봇에 명령을 프로그래밍하는 방법이 다르다는 것입니다. 많은 제조업체는 자체 사용자 정의 프로그래밍 언어를 가지고 있으며 일부는 컨트롤러 버전에 따라 약간 다른 명령을 사용하기도 합니다.
예를 들어, 다음은 위에 나열된 세 가지 명령이 서로 다른 로봇 컨트롤러에 대해 어떻게 표현되는지입니다. 괄호 안에는 6DoF 로봇을 제어하는 데 필요한 매개변수와 값의 최소 개수도 표시했습니다.
| 로봇 | 합동 이동 | 선형 이동 | 속도 설정 | 경로 반올림 |
| ABB IRC5 | MoveJ(4) | 무브(4) | 속도 데이터(4) | 영역 데이터(4) |
| 화낙 RJ3 | J(2) | L(2) | 속도(1) | CNT(1) |
| 가와사키 | JMOVE(1) | LMOVE(1) | 속도(1) | 정확도(1) |
| KUKA KRC | PTP(1) | LIN/SPL(1) | $VEL.CP (1) | $APO.CDIS (1) |
| 모토만 JBI | MOVJ(2) | MOVL(2) | VJ/V(1) | PL(1) |
| 범용 로봇 | 이동(1) | 이동/이동(1) | v(1) | r(1) |
보시다시피 각 명령어는 로봇 유형별로 비슷합니다. 그러나 각 명령어를 정의하는 데 필요한 문구와 정보의 양에는 차이가 있습니다.
오프라인 프로그래밍과 후처리기가 없으면 새로운 유형의 로봇을 프로그래밍할 때마다 완전히 새로운 프로그래밍 언어를 배워야 합니다. 이로 인해 로봇 프로그래밍 속도가 크게 느려집니다.
후처리기는 명령을 로봇 모델의 특정 프로그램으로 변환하여 작동합니다.
RoboDK를 사용하면 로봇을 움직이기 위해 프로그래밍 언어를 배울 필요가 없습니다. 제공된 후처리기는 일반적으로 30개 이상의 로봇 브랜드에 대해 사용 가능한 버그 없는 코드를 생성하기에 충분합니다.
또한 후처리기는 필요한 모든 시작 코드와 변수 정의를 생성하며, 이는 종종 일반 텍스트 기반 프로그래밍에서 정의하기 귀찮은 것입니다.
RoboDK는 40개 이상의 포스트 프로세서와 함께 패키지로 제공됩니다. 로봇 컨트롤러에 적합한 후처리기를 선택해야 합니다.
그 중에서 어떻게 선택합니까?
로봇 라이브러리의 로봇 중 하나를 사용한 적이 있다면 하나의 후처리기가 이미 기본값으로 선택되어 있음을 알 수 있습니다. 종종 이것은 해당 로봇에 대한 최신(또는 기본) 컨트롤러를 사용하고 있다고 가정합니다. 그러나 기본 게시물이 응용 프로그램이나 설정의 요구 사항에 맞지 않는 경우 다른 게시물을 선택해야 할 수도 있습니다.

일반적으로 기본 또는 가장 기본적인 후처리기를 먼저 시도하는 것이 가장 좋습니다.
일부 로봇 브랜드는 RoboDK에서 기본적으로 하나의 옵션만 제공합니다. Mecademic, Kawasaki, CLOOS 등. 이 경우 선택은 매우 간단합니다.
일부 로봇 브랜드는 컨트롤러 또는 프로그래밍 언어 버전에 따라 포스트 프로세서가 다릅니다. 예를 들어 Denso는 이전 RC7 컨트롤러용 후처리 프로세서 하나와 최신 RC8 컨트롤러용 후처리 프로세서 하나를 가지고 있습니다. 이 모델 사이에서 PAC 프로그래밍 언어 프로그래밍에서 PacScript 프로그래밍으로 이동했기 때문입니다.
사용 가능한 경우 특정 컨트롤러에 대한 후처리기를 사용하십시오. 특정 컨트롤러에 대한 옵션이 없으면 컨트롤러의 버전 번호에 가장 가까운 컨트롤러를 사용해 보십시오.
일부 로봇 브랜드에는 상당히 다양한 포스트 프로세서가 있습니다. KUKA에는 10개가 있습니다!
추가 포스트 프로세서 중 일부는 특정 애플리케이션 또는 설정을 위한 것입니다. 예를 들어, KUKA KRC2 컨트롤러에는 5개의 포스트 프로세서가 있습니다. 이 중 2개는 CamRob 밀링 애드온 또는 KUKA CNC 제어를 사용하는 애플리케이션을 위한 것으로, 이를 통해 하나의 프로그램 파일에 수천 줄의 코드를 포함할 수 있습니다(로봇 가공에 적합). 하나는 특히 아크 용접 애플리케이션을 위한 것입니다. 마찬가지로 Robotiq 그리퍼를 통합하는 UR 후처리기가 있습니다.
특정 애플리케이션 또는 설정에 맞는 컨트롤러용 후처리기가 있으면 이를 사용하십시오. 그러나 응용 프로그램에 대한 것이 없으면 브랜드 및 컨트롤러에 대한 기본 후처리기를 사용하십시오.
때로는 RoboDK에서 생성한 프로그램이 귀하의 애플리케이션에 정확히 맞지 않을 수 있습니다. 기능을 확장하기 위해 코드 줄을 추가할 수 있습니다. 로봇의 프로그래밍 언어에 약간 익숙하다면 매우 쉽게 수행할 수 있습니다.
생성된 코드를 더 쉽게 변경하고 업데이트할 수 있도록 몇 가지 후처리기가 제공됩니다.
예를 들어, KUKA KRC2에는 DAT 파일을 생성하는 옵션이 있습니다. 이것은 KUKA 컨트롤러의 흥미로운 기능입니다. 이 구성에서 위치는 별도의 DAT 파일에 변수로 저장되며, 위치를 변경하기 위해 변수만 변경하면 되므로 코드를 업데이트하는 것이 더 쉬울 수 있습니다.
마찬가지로 Siemens Sinumerik 후처리 프로세서에는 두 가지가 있습니다. 하나는 위치가 밀리미터로 제공되고 다른 하나는 인치로 제공됩니다.
필요한 경우 로봇 코드를 최대한 쉽게 업데이트할 수 있는 후처리기를 선택하십시오.
고유한 구성으로 로봇을 사용하는 경우와 같이 경우에 따라 고유한 후처리기를 작성해야 할 수도 있습니다.
특정 설정 또는 애플리케이션에 대해 기존 후처리기를 사용자 정의할 수도 있습니다.
RoboDK에서 사용자 정의 후처리기를 작성하는 것은 모두 Python 프로그램이고 유사한 형식으로 작성되기 때문에 매우 쉽습니다.
이 비디오에서 포스트 프로세서를 생성하거나 업데이트하는 방법을 보여주는 간단한 튜토리얼을 볼 수 있습니다.
자세한 내용은 설명서의 후처리기 페이지를 확인하세요.
후처리기에 대해 어떤 질문이 있습니까? 아래 의견에 알려주거나 에서 토론에 참여하십시오. 링크드인 , 트위터 , 페이스북 또는 인스타그램 .
산업용 로봇
전자 및 전기 엔지니어는 말 그대로 실용 기술의 최전선에서 일하며 우리가 매일 사용하는 시스템과 장치를 개선합니다. 휴대 전화에서 자동차, 태양 에너지에 이르기까지 혁신은 무엇보다도 사회의 기술, 통신 및 에너지 요구 사항을 충족하는 데 필요합니다. 따라서 이 기사에서는 현재 애플리케이션과 함께 전압 조정기, 정확히는 LM323 조정기의 중요성을 배우게 됩니다. 여기에서 LM323 전자 지식에 대한 많은 정보를 얻으실 수 있습니다. LM323 핀 구성 첫째, 선형 전압 조정기인 LM323은 미리 설정된 5V 출력과 함께 제공되는
CNC(Computer Numerical Control) 가공은 제조 분야에서 점점 보편화되고 있습니다. CNC 기술은 고품질 부품의 대량 생산을 위한 다목적 자동화 수단을 제공합니다. CNC 가공 공정이 제공하는 높은 수준의 정확도와 반복성은 대부분의 제조업체에 이상적인 도구입니다. CNC 가공이란 무엇입니까? 일반적으로 CNC 머시닝은 설계를 수행하기 위해 공작물에서 재료를 제거하는 많은 환원 프로세스 중 하나를 나타냅니다. CNC 프로세스는 컴퓨터 제어를 사용하여 처음부터 끝까지 전체 가공 프로세스를 처리하여 궁극적으로 일