

산업용 로봇

산업 제조
귀하의 작업이 오프라인 프로그래밍에 적합합니까? 오프라인 프로그래밍 소프트웨어로 가능한 상위 10가지 로봇 작업을 살펴봅니다.
새로운 기술에 대한 공통적인 우려는 "하지만 그것이 내 고유한 상황에서 작동할 것인가?"라는 질문에 포함되어 있습니다.
오프라인 프로그래밍도 다르지 않습니다. 사람들은 그 이점을 아주 빨리 깨닫지만 때때로 그것이 그들의 특정 작업에 적용되지 않을 것이라고 걱정합니다. 우리는 그들의 우려를 이해합니다. 모든 사람의 비즈니스는 고유하며 오프라인 프로그래밍과 같은 기술이 귀하에게 가장 적합한지 판단하기 어려울 수 있습니다.
그러나 귀하의 상황이 고유하더라도 귀하의 로봇 애플리케이션과 우리가 항상 보는 다른 애플리케이션 사이에는 유사점이 있습니다. 오프라인 프로그래밍은 많은 로봇 작업에 사용할 수 있습니다.
이 기사에서는 오프라인 프로그래밍을 사용할 수 있는지 여부를 결정하는 요소를 설명하고 RoboDK의 상위 10개 작업을 나열합니다.
로봇으로 작업을 수행할 수 있다면 오프라인 프로그래밍을 사용하여 거의 확실하게 프로그래밍할 수 있습니다. 그러나 프로그래밍을 수행하는 것이 얼마나 쉬운(또는 어려운)지를 결정하는 몇 가지 요소가 있습니다.
5가지 중요한 요소는 다음과 같습니다.
이러한 요인의 대부분은 올바른 오프라인 프로그래밍 소프트웨어를 선택하여 극복할 수 있습니다.
오프라인 프로그래밍을 사용하여 동일하거나 유사한 작업을 구현하는 사람들을 종종 봅니다. 여러분의 삶을 더 쉽게 만들기 위해 오프라인 프로그래밍을 사용하여 구현하는 방법에 대한 지침과 함께 가장 일반적인 작업 목록을 수집했습니다.
예제 페이지에서 RoboDK에서 이러한 작업을 프로그래밍하는 방법에 대한 대화형 시뮬레이션 및 자습서를 찾을 수 있습니다.
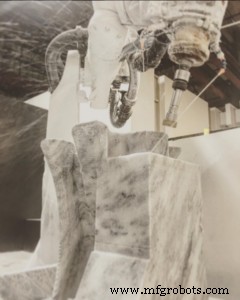
과거에는 자동 밀링 및 기계 가공이 CNC 기계로 수행되는 경향이 있었습니다. 로봇이 관련된 경우 일반적으로 머신 텐딩에만 사용되었습니다.
그러나 요즘에는 로봇이 기계 가공 자체에 사용되기 시작했습니다. 산업용 로봇의 정확도 향상과 보다 직관적인 오프라인 프로그래밍을 통해 CNC 코드를 로봇 명령어로 쉽게 변환할 수 있습니다.
RoboDK의 유틸리티 메뉴에는 전용 로봇 가공 도구가 포함되어 있습니다. RoboDK Machining 링크에서 데모를 참조하십시오.
아마도 가장 인기 있는 로봇 작업은 작업 셀의 한 부분에서 다른 부분으로 물체를 이동하는 픽 앤 플레이스입니다. 이러한 작업은 오프라인 프로그래밍을 사용하여 프로그래밍하기가 매우 쉽습니다. 이전 기사에서 설명한 것처럼 간단한 픽 앤 플레이스 작업을 15분 이내에 프로그래밍할 수 있습니다.
RoboDK Pick and Place 링크에서 데모를 확인하세요.
일반 대중에게 산업용 로봇 작업의 이름을 물어본다면 로봇 페인팅이 가장 높은 순위를 차지할 것입니다. 페인팅은 가장 일반적인 로봇 응용 프로그램 중 하나이며 오프라인 프로그래밍을 사용하여 수행하기 쉽습니다. 소프트웨어는 몇 분 안에 공구 경로를 생성할 수 있습니다.

RoboDK Painting 링크에서 데모를 확인하세요.
오프라인 프로그래밍은 오랫동안 스폿 용접 프로그램을 생성하는 데 사용되었습니다. 그러나 과거에는 이 작업을 수행하는 데 많은 시간이 소요되고 전문 프로그래머가 필요했습니다. 최신 소프트웨어를 사용하면 스폿 용접 프로그램을 오류 없이 쉽게 생성할 수 있습니다.
RoboDK 스폿 용접 링크에서 데모를 참조하십시오.
3D 프린팅은 21세기의 대표적인 기술 중 하나입니다. 3D 프린팅이 등장한 지 얼마 되지 않았지만 지난 10년 동안 3D 프린팅 애플리케이션이 폭발적으로 증가했습니다. 가장 흥미로운 최근 개발 중 하나는 로봇 자체를 3D 프린터로 사용하는 것입니다. 오프라인 프로그래밍을 사용하면 이를 매우 간단하게 달성할 수 있습니다.

RoboDK의 유틸리티 메뉴에는 전용 3D 인쇄 도구가 포함되어 있습니다. RoboDK 3D 인쇄 링크에서 데모를 확인하세요.
컨베이어는 다양한 부가가치 프로세스 간에 물체를 운송하기 위해 많은 산업 분야에서 사용됩니다. 그러나 로봇과 통합하기 어려운 경우가 많습니다. 오프라인 프로그래밍 소프트웨어가 지원하는 경우(RoboDK에서와 같이) 온라인 통합 시간을 많이 절약할 수 있습니다.

RoboDK 컨베이어 피킹 링크에서 데모를 확인하세요.
머신 비전을 사용한 검사는 로봇의 인기 있는 애플리케이션이 되었습니다. 그 이유는 분명합니다. 수동 검사는 생산성이 증가함에 따라 증가하는 힘든 작업입니다. 머신 비전의 오프라인 프로그래밍은 온라인 프로그래밍을 완전히 대체할 수 없지만(실제 이미지를 사용하여 카메라를 훈련해야 하기 때문에) 통합 프로세스의 속도를 높이는 데 도움이 될 수 있습니다.

RoboDK 자동 검사 링크에서 데모 보기 .
그리기는 로봇에게 하찮은 활동처럼 들릴 수 있습니다. 그러나 많은 유용한 응용 프로그램이 있습니다. 로봇을 사용하여 케이크에 아이싱 패턴을 그리고 밀링 도구를 사용하여 예술적 윤곽을 자르고 제품에 손글씨 스타일로 페인트할 수 있습니다. 오프라인 프로그래밍을 통해 SVG 이미지(벡터 이미징 표준)를 로봇 경로로 쉽게 변환할 수 있습니다.
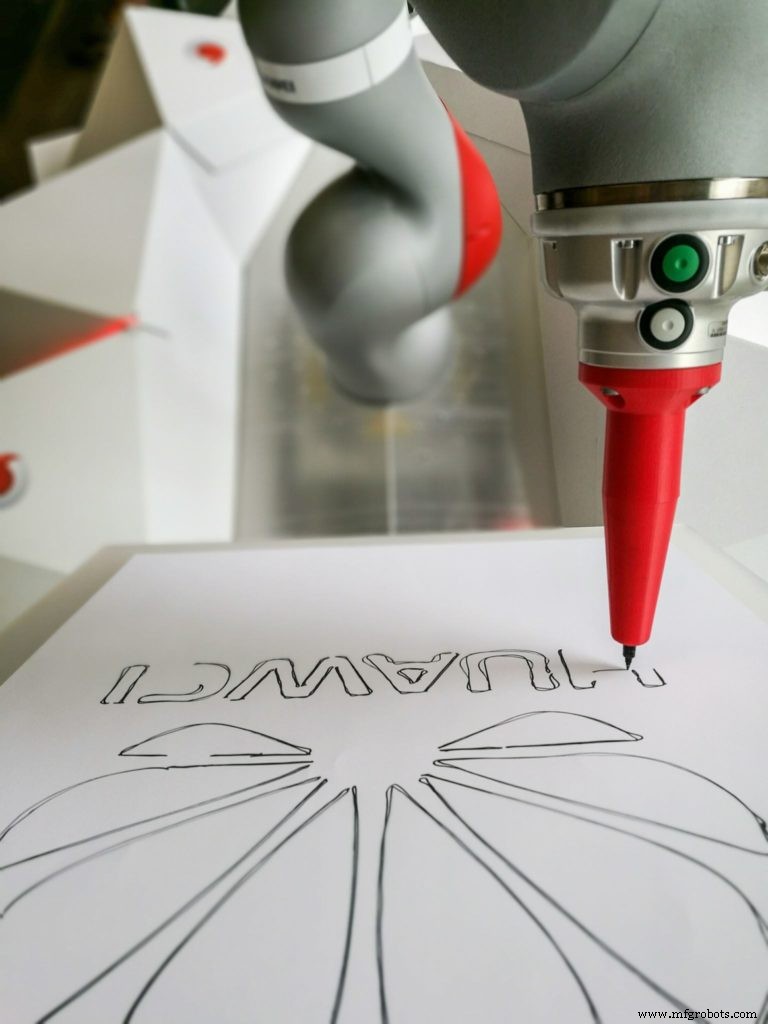
RoboDK Drawing 링크에서 데모를 참조하십시오.
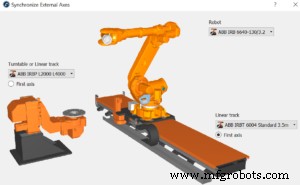
이것은 그 자체로 "작업"이 아닙니다. 로봇으로 달성할 수 있는 작업의 범위를 개선하는 기술에 가깝습니다. 외부 축을 사용하면 페인팅, 스폿 용접, 검사 등과 같은 작업을 위해 로봇의 작업 공간을 확장할 수 있습니다. 외부 축은 기본적으로 로봇에 추가되는 추가 1 또는 2 자유도입니다. 유일한 문제는 로봇과 동기화해야 한다는 것입니다. 오프라인 프로그래밍을 사용하면 이 동기화가 쉽습니다.
RoboDK의 유틸리티 메뉴에는 외부 축을 위한 전용 동기화 도구가 포함되어 있습니다. 이 링크에서 데모를 참조하십시오. RoboDK Machining With External Axis.
여기에 작업이 나열되지 않더라도 오프라인 프로그래밍으로 작업을 수행할 수 있습니다. 확실하지 않은 경우 언제든지 당사에 연락하여 특정 작업에 대해 문의하거나 아래에 의견을 게시하세요.
오프라인 프로그래밍을 시작하는 가장 좋은 방법은 소프트웨어를 다운로드하여 직접 사용해 보는 것입니다. RoboDK 다운로드 링크에서 무료 평가판을 다운로드하십시오.
산업용 로봇
산업용 로봇을 프로그래밍하고 싶지만 시작하는 가장 좋은 방법은 무엇입니까? 초보자로서 로봇 프로그래밍은 벅찬 전망이 될 수 있습니다. 프로그래밍은 전통적으로 산업용 로봇을 사용할 때 가장 어려운 측면 중 하나였습니다. 프로그래밍 프로세스를 최대한 쉽게 만들 수 있는 방법은 무엇인가요? 누구나 로봇과 함께 어딘가에서 시작해야 합니다. 우리 모두는 전에 산업용 로봇을 한 번도 사용해 본 적이 없는 시간을 가졌습니다. 산업용 로봇을 처음 접하는 경우 시작하려면 배워야 할 것이 많습니다. 로봇 하드웨어, 엔드 이펙터, 센서에
다음은 초보자를 위한 CNC 프로그래밍 예제입니다. 이 CNC 프로그래밍 예제는 cnc 학습을 위한 시작 단계입니다. 또는 초보자를 위한 CNC 프로그래밍 . 여기에서 많은 무료 cnc 프로그래밍 예제를 찾을 수 있습니다. 구성 요소 도면과 함께. 이 cnc 프로그래밍 예제는 cnc 보링 바 도구로 cnc 보링을 설명합니다. 초보자를 위한 CNC 프로그래밍 CNC 프로그래밍 예제 CNC 프로그램 예시 N1 T01 G20N2 G00 X3.5 Z0.5N3 G01 G96 S120 Z0 F.5N4 G02 X2 Z-.75 R0.75 F