

산업기술

산업 제조
일반적으로 권선형 회전자 유도 전동기의 회전자 권선은 시동 후 단락됩니다. 기동하는 동안 저항은 회전자 권선과 직렬로 배치되어 기동 전류를 제한할 수 있습니다. 이러한 권선이 공통 시동 저항에 연결되어 있으면 두 개의 로터는 시동 중에 동기화된 상태를 유지합니다.
이것은 시작하는 동안 두 개의 모터를 동기화해야 하는 인쇄기 및 도개교에 유용합니다. 일단 시동되고 로터가 단락되면 동기화 토크가 없습니다. 기동 시 저항이 높을수록 한 쌍의 모터에 대한 동기 토크가 높아집니다.
시동 저항이 제거되었지만 로터가 여전히 평행하면 시동 토크가 없습니다. 그러나 상당한 동기화 토크가 있습니다. 이것을 selsyn이라고 합니다. , "자체 동기식"의 약어입니다.
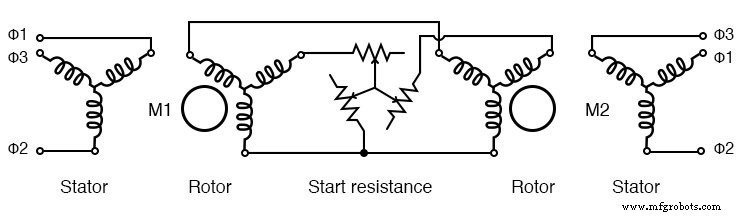
일반 저항에서 권선형 회전자 유도 전동기 시작
로터는 고정되어 있을 수 있습니다. 하나의 로터가 각도 θ로 이동하면 다른 selsyn 샤프트는 각도 θ로 이동합니다. 한 selsyn에 끌기가 적용되면 다른 샤프트를 회전하려고 할 때 이것이 느껴집니다.
다중 마력(다중 킬로와트) selsyn이 존재하지만 주요 애플리케이션은 원격 위치 표시와 같은 계측 애플리케이션을 위한 몇 와트의 작은 단위입니다.
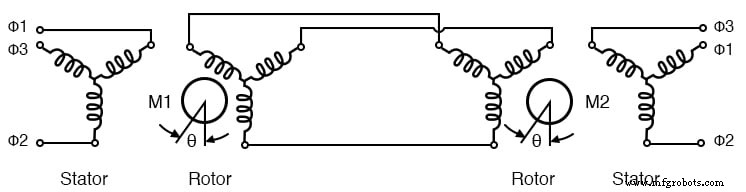
시작 저항 없는 셀신
계측 selsyn은 저항을 시작하는 데 사용하지 않습니다(위 그림). 자동 회전하도록 설계되지 않았습니다. 로터가 단락되지 않았거나 저항이 로드되지 않았기 때문에 시작 토크가 발생하지 않습니다.
그러나 하나의 샤프트를 수동으로 회전하면 병렬 장치의 샤프트가 따를 때까지 로터 전류의 불균형이 발생합니다. 3상 전원의 공통 소스는 두 고정자 모두에 적용됩니다. 위는 3상 로터를 보여주지만 아래 그림과 같이 단상 구동 로터로도 충분합니다.
동기라고도 하는 소형 계측 selsyns , 단상 병렬 AC 전원 회전자를 사용하여 외부에서 전원이 공급되지 않는 3상 병렬 고정자를 유지합니다. 다음은 로터리 트랜스포머로서의 싱크로스 기능입니다.
두 토크 트랜스미터의 로터가 (TX) 및 토크 수신기 (RX)가 동일한 각도에 있고 유도된 고정자 전압의 위상은 둘 다 동일하며 전류가 흐르지 않습니다.
하나의 회전자가 다른 회전자에서 변위되는 경우 고정자 위상 전압은 송신기와 수신기 간에 다릅니다. 고정자 전류가 발생하는 토크로 흐를 것입니다. 수신기 샤프트는 전기적으로 송신기 샤프트에 종속됩니다. 송신기 또는 수신기 샤프트를 회전하여 반대쪽 장치를 돌릴 수 있습니다.
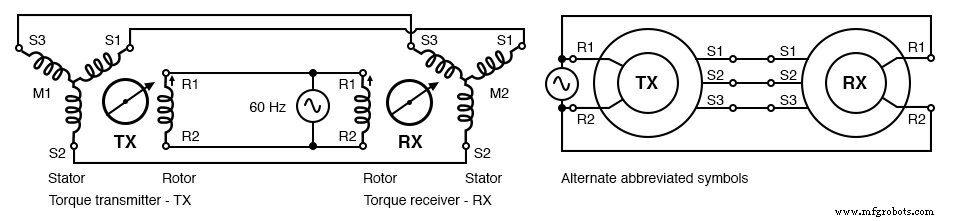
싱크로에는 단상 구동 로터가 있습니다.
동기 고정자는 외부 단자로 나온 3상 권선으로 감겨 있습니다. 토크 트랜스미터 또는 리시버의 단일 로터 권선은 브러시드 슬립 링에 의해 나옵니다. 싱크로 송신기와 수신기는 전기적으로 동일합니다.
그러나 싱크로 수신기에는 관성 감쇠 기능이 내장되어 있습니다. 토크 수신기를 싱크로 토크 트랜스미터로 대체할 수 있습니다.
원격 위치 감지는 주요 동기화 응용 프로그램입니다. 예를 들어, 레이더 안테나에 연결된 싱크로 송신기는 제어실의 표시기에 안테나 위치를 나타냅니다.
풍향계에 연결된 싱크로 송신기는 원격 콘솔에서 바람의 방향을 나타냅니다. 싱크로는 240Vac 50Hz, 115Vac 60Hz, 115Vac 400Hz 및 26Vac 400Hz 전원에서 사용할 수 있습니다.
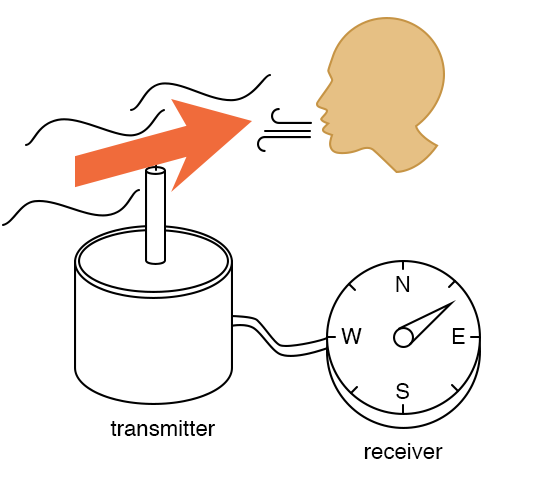
동기화 응용 프로그램:원격 위치 표시
동기 차동 송신기 (TDX)에는 3상 회전자와 고정자가 있습니다. 동기 차동 트랜스미터는 회전자 입력의 전기 각도 입력에 샤프트 각도 입력을 추가하여 고정자 출력의 합계를 출력합니다.
이 고정자 전기 각도는 RX로 전송하여 표시할 수 있습니다. 예를 들어, 싱크로 수신기는 선박의 선수를 기준으로 레이더 안테나의 위치를 표시합니다. 싱크로 디퍼렌셜 송신기로 선박의 나침반 방향을 추가하면 선박의 방향에 관계없이 진북을 기준으로 RX의 안테나 위치가 표시됩니다.
TX와 TDX 사이의 고정자 리드의 S1-S3 쌍을 반대로 하면 각도 위치가 뺍니다.
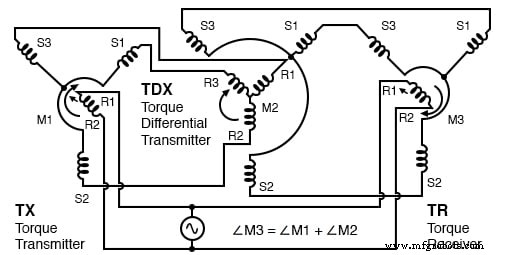
토크 차동 트랜스미터(TDX)
싱크로 송신기에 연결된 선상 레이더 안테나는 선박의 선수에 대한 안테나 각도를 인코딩합니다(아래 그림). 진북을 기준으로 안테나 위치를 표시하는 것이 좋습니다.
진북(∠antenna + ∠gyro)에 대한 안테나 각도를 표시하려면 자이로컴퍼스에서 향하는 선박을 선수 기준 안테나 위치에 추가해야 합니다.
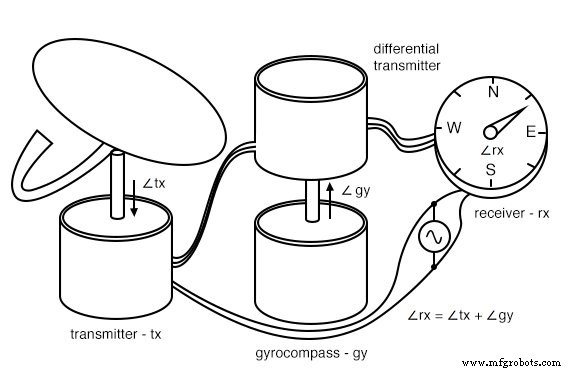
토크 차동 트랜스미터 적용:각도 추가
∠antenna-N =∠antenna + ∠gyro ∠rx =∠tx + ∠gy
예를 들어, 선박의 방향은 ∠30°, 선박의 선수에 대한 안테나 위치는 ∠0°, ∠antenna-N은 다음과 같습니다.
∠rx =∠tx + ∠gy ∠30° =∠30° + ∠0°
예를 들어, 선박의 방향은 ∠30°, 선박의 선수에 대한 안테나 위치는 ∠15°, ∠antenna-N은 다음과 같습니다.
∠45° =∠30° + ∠15°
참고로 TDX(Torque Differential Transmitter)와 TDR(Torque Differential Receiver)을 모두 사용하여 축각의 뺄셈과 덧셈에 대한 배선도를 보여줍니다. TDX에는 샤프트의 토크 각도 입력, 3개의 고정자 연결에 대한 전기 각도 입력, 3개의 로터 연결에 대한 전기 각도 출력이 있습니다.
TDR은 고정자와 회전자 모두에 전기 각도 입력이 있습니다. 각도 출력은 TDR 샤프트의 토크입니다. TDX와 TDR의 차이점은 TDX는 토크 전송기이고 TDR은 토크 수신기입니다.
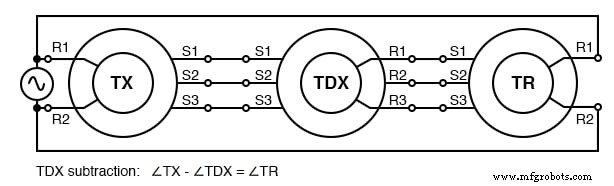
TDX 빼기
토크 입력은 TX 및 TDX입니다. 토크 출력 각도 차이는 TR입니다.
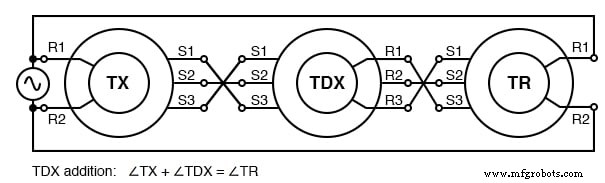
TDX 추가
토크 입력은 TX 및 TDX입니다. 토크 출력 각 합은 TR입니다.
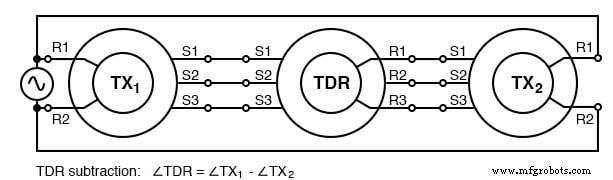
TDR 빼기
토크 입력은 TX1입니다. 및 TX2 . 토크 출력 각도 차이는 TDR입니다.
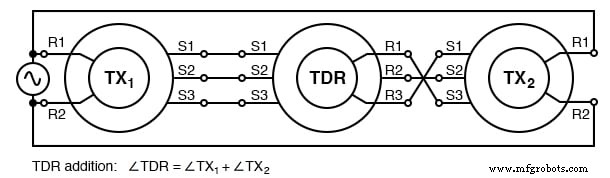
TDR 추가
토크 입력은 TX1입니다. 및 TX2 . 토크 출력 각 합은 TDR입니다.
싱크로 트랜스미터의 변형은 컨트롤 트랜스포머입니다. . TX와 같은 3개의 균등한 간격의 고정자 권선이 있습니다. 로터는 일반적으로 서보에 의해 회전할 때 null을 감지하는 데 더 민감하게 하기 위해 송신기 또는 수신기보다 더 많은 회전으로 감겨 있습니다. 시스템.
CT(제어 변압기) 회전자 출력은 고정자 자기장 벡터에 대해 직각 방향일 때 0입니다. TX 또는 RX와 달리 CT는 토크를 전송하거나 수신하지 않습니다. 이것은 단순히 민감한 각도 위치 감지기입니다.
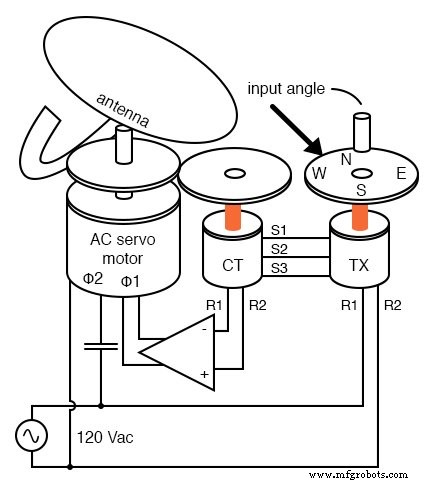
컨트롤 변압기(CT)가 서보 null을 감지합니다.
위 그림에서 TX의 샤프트는 레이더 안테나의 원하는 위치에 설정되어 있습니다. 서보 시스템은 서보 모터가 안테나를 명령된 위치로 구동하도록 합니다. CT는 명령된 위치와 실제 위치를 비교하고 명령된 각도가 달성될 때까지 모터를 구동하도록 서보 증폭기에 신호를 보냅니다.
서보는 CT를 사용하여 안테나 위치 null을 감지합니다.
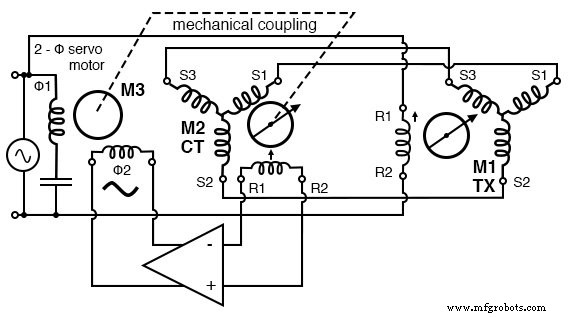
제어 변압기 로터가 90°에서 null을 감지할 때 고정자 필드의 축에는 회전자 출력이 없습니다. 모든 회전자 변위는 변위에 비례하는 AC 오류 전압을 생성합니다.
서보 네거티브 피드백으로 인해 명령된 변수와 측정된 변수 사이의 오류를 최소화하려고 합니다. 제어 변압기는 샤프트 각도를 TX 고정자가 보낸 고정자 자기장 각도와 비교합니다.
최소값 또는 널값을 측정하면 서보가 안테나를 구동하고 변압기 회전자를 명령된 위치로 제어합니다. 측정된 위치와 지령된 위치 사이에 오차가 없으며 증폭할 CT 출력이 없습니다.
서보 모터 , 2상 모터가 회전을 멈춥니다. 그러나 CT 감지 오류는 오류가 최소화될 때까지 모터를 구동하는 증폭기를 구동합니다. 이것은 안테나 결합 CT를 TX에서 명령한 각도와 일치하도록 구동한 서보 시스템에 해당합니다.
서보 모터는 감속기어열을 구동할 수 있으며 TX 및 CT 싱크로에 비해 크기가 큽니다. 그러나 AC 서보 모터의 열악한 효율은 더 작은 부하로 제한됩니다. 또한 일정한 속도의 장치이기 때문에 제어하기가 어렵습니다.
그러나 그들은 다른 상의 라인 전압으로 한 상의 전압을 변화시킴으로써 어느 정도 제어할 수 있습니다. 대형 DC 서보 모터는 고부하를 보다 효율적으로 구동합니다.
항공 애플리케이션은 TX, CT 및 서보 모터와 같은 400Hz 구성 요소를 사용합니다. AC 자기 부품의 크기와 무게는 주파수에 반비례합니다. 따라서 움직이는 조종면과 같은 항공기 응용 분야에 400Hz 구성 요소를 사용하면 크기와 무게를 줄일 수 있습니다.
해결사 (아래 그림) 90°에 두 개의 고정자 권선이 있습니다. 교류에 의해 구동되는 단일 회전자 권선. 리졸버는 극에서 직사각형으로 변환하는 데 사용됩니다. 회전자 샤프트의 각도 입력은 고정자 권선에 직교 좌표 sinθ 및 cosθ 비례 전압을 생성합니다.
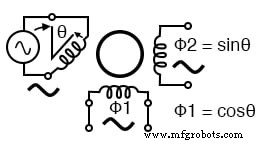
Resolver는 샤프트 각도를 각도의 사인 및 코사인으로 변환합니다.
예를 들어 레이더 내의 블랙박스는 대상까지의 거리를 사인파 비례 전압 V로 인코딩하고 베어링 각도를 샤프트 각도로 인코딩합니다. X 및 Y 좌표로 변환합니다. 사인파는 리졸버의 로터에 공급됩니다. 베어링 앵글 샤프트는 리졸버 샤프트에 결합됩니다. 좌표(X, Y)는 리졸버 고정자 코일에서 사용할 수 있습니다.
X=V(cos(∠bearing)) Y=V(sin(∠bearing))
데카르트 좌표(X, Y)는 지도 디스플레이에 표시될 수 있습니다. TX(토크 트랜스미터)는 리졸버로 서비스하도록 조정될 수 있습니다.

Scott-T는 TX가 리졸버 기능을 수행할 수 있도록 3-φ를 2-φ로 변환합니다.
Scott-T 변신 로봇. 3개의 TX 출력(3상)은 Scott-T 변압기를 한 쌍의 구적 구성 요소로 변환합니다. 인덕토신으로 알려진 리졸버의 선형 버전도 있습니다. inductosyn의 회전 버전 리졸버보다 더 미세한 해상도를 가지고 있습니다.
요약:Selsyn(동기) 모터
<울>산업기술
3D 프린팅은 비교적 짧은 시간에 먼 길을 왔습니다. 많은 사람들이 여전히 플라스틱 부품을 인쇄하는 취미 생활의 관점에서 프로세스를 생각할 수 있지만 3D 금속 인쇄는 점점 더 일반적인 제조 방법입니다. 고급 서보 모터는 이 기술을 더욱 발전시킵니다. 3D 금속 프린팅은 이미 제조 공정에 많은 이점을 제공합니다. 기존 생산 방식보다 빠르고 정확하며 저렴하고 낭비가 적습니다. 제조업체가 3D 프린터에 새로운 서보 모터를 추가함에 따라 이러한 모든 이점을 새로운 차원으로 끌어올릴 수 있습니다. 다음은 고급 서보 모터가 금속 적층 제조
AC 모터와 엔코더는 로봇의 두 가지 중요한 부분입니다. 그들은 로봇에게 목적을 부여합니다. 그것들이 없으면 움직임이 없을 것이고, 움직임이 없으면 로봇은 목적이 없습니다. 물론 누군가가 거실이나 작업장을 위한 대형 산업용 로봇 조각상을 원하지 않는 한 말입니다. AC 모터는 교류 전류에 의해 구동되는 모터입니다. 최근까지 교류 모터는 로봇 작동을 위한 최선의 선택이 아니었습니다. 과거의 많은 로봇은 직류 또는 DC 모터만 사용했습니다. 그러나 마이크로 전자 공학의 발전과 함께 AC 모터가 개선되기 시작하면서 이러한 모터는 다양한