

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
|
Arthur Ganson은 모두 함께 연결된 1/50 비율 기어의 12단계로 구성된 "Machine with Concrete"라는 영감을 주는 조각품을 만들었습니다. 첫 번째 기어는 200rpm으로 회전하고 전체 회전에는 1/200분이 걸립니다. 마지막 기어(콘크리트에 묻혀 있음)의 전체 회전 시간을 맞춰보세요:137억(10^12)년!
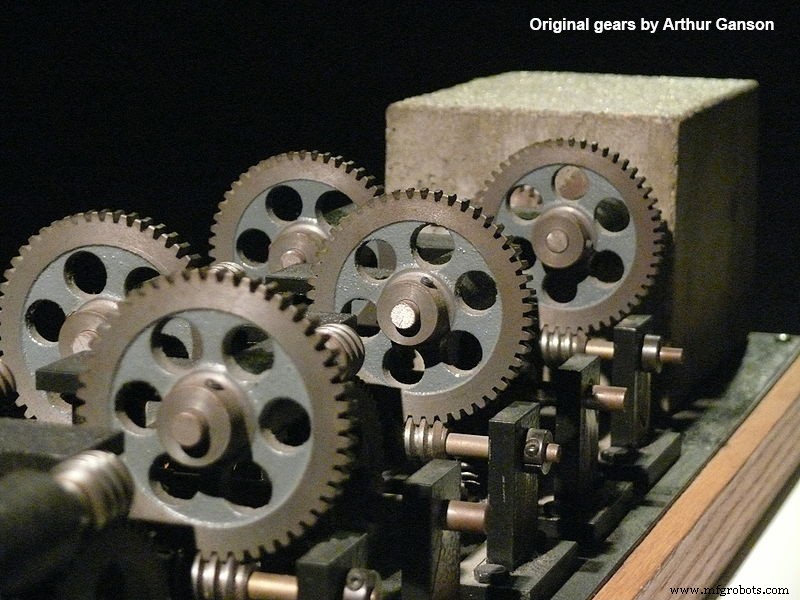
첫 번째 기어를 얼마나 빨리 회전시키든 간에 시스템 내부에서 노력이 줄어듭니다. 인생도 비슷하고 느낌도 비슷합니다. 우리는 많은 일을 하고 그것들은 우주에 아주 조금 추가됩니다. 따라서 우리가 할 수 있는 최선은 우리가 좋아하고 우리를 행복하게 하는 일을 하는 것입니다!
그래서 우리는 Arduino Uno로 구동되는 다양한 단계의 회전 카운터 스위치가 있는 보다 컴팩트한 형태의 INFINITY GEARS라는 유사한 프로젝트를 만들었습니다. 250rpm DC 기어드 모터로 첫 번째 기어를 회전합니다.
마지막 기어의 전체 회전 시간을 맞춰보세요!? ------> 기다려요 -------> 346 Quintilion (346 x 10^18) 년! 우주 (아마도)조차도 완전한 회전을 보지 못할 것입니다! 그래서 마지막 기어를 "회전할 수 없는 사각형 기어"로 디자인했습니다.
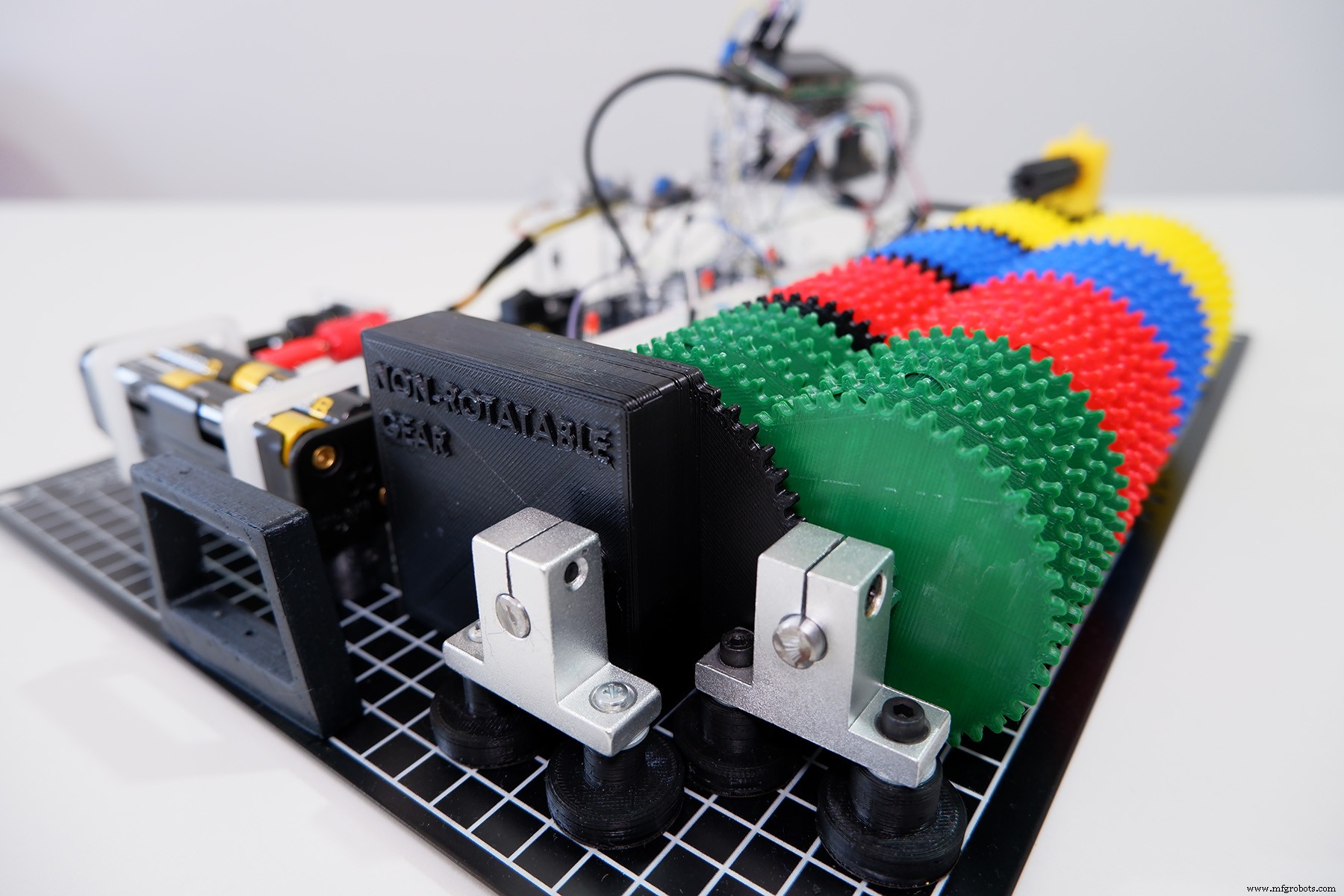
우리 프로젝트의 모든 기어는 작은 자석이 있는 5개의 검정색을 제외한 색상으로 3D 인쇄됩니다(모터 샤프트의 +1 검정색 기어에는 자석이 없음). 그들의 회전은 Arduino Uno + 2x16 LCD에 연결된 리드 스위치 + LED로 계산됩니다.
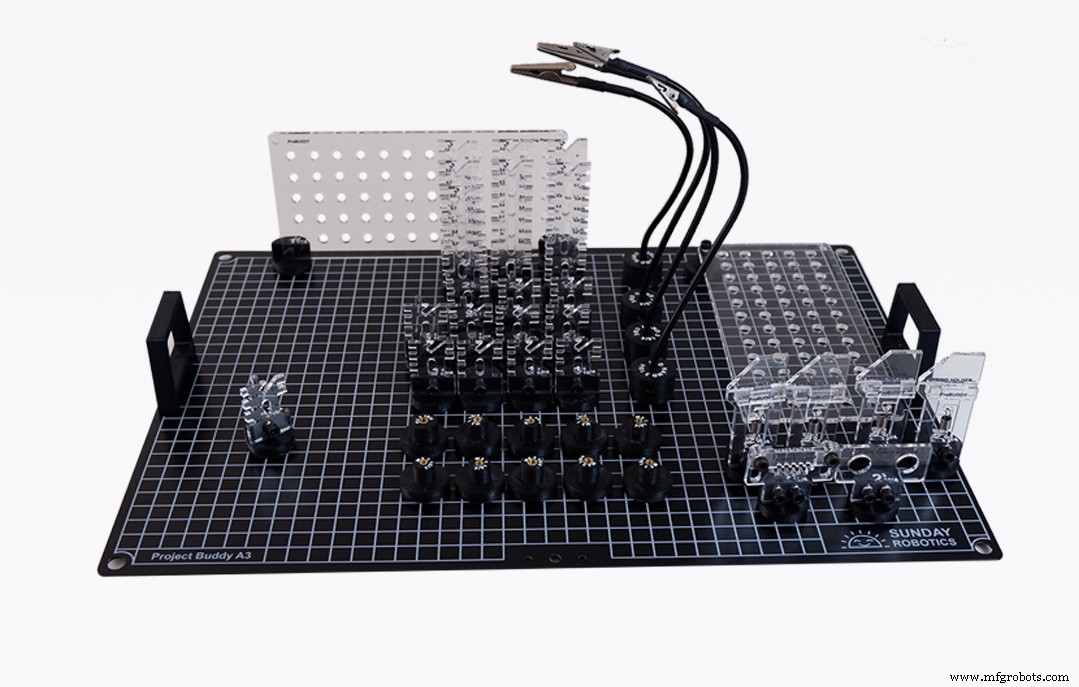
우리는 A3 크기의 ProBUDDY 키트에 프로젝트를 구축했습니다. 이 키트는 프로젝트를 구축, 저장, 운반하는 동안 많은 도움이 되고 용이합니다. (2022년 1월 11일 킥스타터에서 곧 시작) 제품 페이지:https://www.sundayrobotics.com/probuddy/
1차 블랙기어는 0.002분 만에 1회전 완료, 쉽게 볼 수 있습니다..
하지만 2nd Black 기어는 135일 만에 완전 로테이션을 완료합니다! 이렇게 오래 기다리면..
3번째 블랙 기어, OMG가 360만(3.6 x 10^6)년에 완전히 회전합니다!
4번째 블랙 기어, 세상에, 35조(35 x 10^12)!
5번째 스퀘어 블랙 기어, OOOOOOMMMMMMMGGGGGGGG, 346퀸틸리온(346 x 10^18) YEARS! (우주가 회전하는 것을 볼 수 있을까요? 확실하지 않습니다!)
#include/* 이 라이브러리는 LCD 화면 사용을 위해 포함되어야 합니다. */LiquidCrystal LCD(12, 11, 5, 4, 3, 2); /* LCD가 연결된 Arduino 핀. *//* 리드 스위치 센서 정의. */int reed1 =6;int reed2 =7;int reed3 =8;int reed4 =9;int reed_status1, reed_status2, reed_status3, reed_status4; /* 카운터 정의. */int counter1 =0;int counter2 =0;int counter3 =0;int counter4 =0;void setup() { lcd.begin(16, 2); /* LCD의 행 및 열 번호가 지정됩니다. *//* LCD의 첫 번째 줄에 쓸 텍스트입니다. */ lcd.setCursor(0, 0); lcd.print("SUNDAY ROBOTICS");/* LCD의 두 번째 줄에 쓸 텍스트. */ lcd.setCursor(0, 1); lcd.print(" INFINITE GEARS");/* 리드 스위치가 입력으로 설정됩니다. */ 핀모드(리드1,입력); 핀모드(리드2,입력); 핀모드(리드3,입력); 핀모드(리드4,입력); 지연(1500); /* 시작 화면은 1500밀리초 동안 기다립니다. */}void loop() {/* 리드 스위치 센서 상태를 읽은 다음 상태를 변수에 전달합니다. */ reed_status1 =digitalRead(reed1); reed_status2 =디지털 읽기(reed2); reed_status3 =디지털 읽기(reed3); reed_status4 =digitalRead(reed4);// 리드 스위치 상태가 0이면 시스템은 100밀리초 동안 대기하고 카운터는 1씩 증가합니다. */ if(reed_status1 ==0){ delay(100); 카운터1++; } else if(reed_status2 ==0){ 지연(100); 카운터2++; } else if(reed_status3 ==0){ 지연(100); 카운터3++; } else if(reed_status4 ==0){ 지연(100); 카운터4++; } } lcd.clear(); /* LCD 화면을 청소합니다. */ /* 스플래시 화면 다음에 쓸 텍스트. */ lcd.setCursor(0, 0); lcd.print("무한 기어"); /* 카운터 값은 두 번째 줄에 기록됩니다. */ lcd.setCursor(0, 1); lcd.print("F:"); lcd.print(카운터1); lcd.print("S:"); lcd.print(카운터2); lcd.print(" T:"); lcd.print(카운터3); lcd.print("F:"); lcd.print(카운터4); lcd.print("F:"); lcd.print(counter5); }

제조공정
톱니바퀴는 기계 조립에 사용되는 기계 부품입니다. 기어라고도 하며 자동차 변속기를 비롯한 많은 일반 장치의 필수 부품입니다. 기어의 몸체는 바퀴가 회전하는 것처럼 회전하며, 그 바깥쪽 가장자리에는 톱니 또는 톱니라고 하는 돌기가 늘어서 있습니다. 따라서 이름 톱니바퀴. 이 톱니는 기어가 기계 어셈블리의 다른 기어에 에너지와 방향을 전달할 수 있도록 합니다. 훨씬 더 정교한 기계가 작동할 수 있게 해주는 기본 부품으로, 비슷한 기능을 가진 사물이나 사람에게 비유적으로 적용되는 경우가 많습니다. 톱니바퀴의 톱니는 유사한 톱니가 있는
유압 기어 펌프는 광업, 건설, 야금 및 화학 산업과 같은 다양한 산업 공정에서 사용되는 중요한 기계입니다. 또한 농업, 원예 및 물 관리에도 널리 사용됩니다. 이 기사에서는 유압 기어 펌프, 작동 원리 및 사용되는 일부 응용 분야에 대한 기본적인 이해를 제공합니다. 유압 기어 펌프의 기원과 발전 유압 기어 펌프는 유압의 힘을 이용하여 회전 운동을 전달하는 기계입니다. 1795년 William Symington 경이 처음 발명했습니다. 현대식 유압 기어 펌프는 1800년대 초에 개발되었습니다. 유압 기어 펌프의 작동 원리 유