

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
 |
| |||
 |
|
 |
|
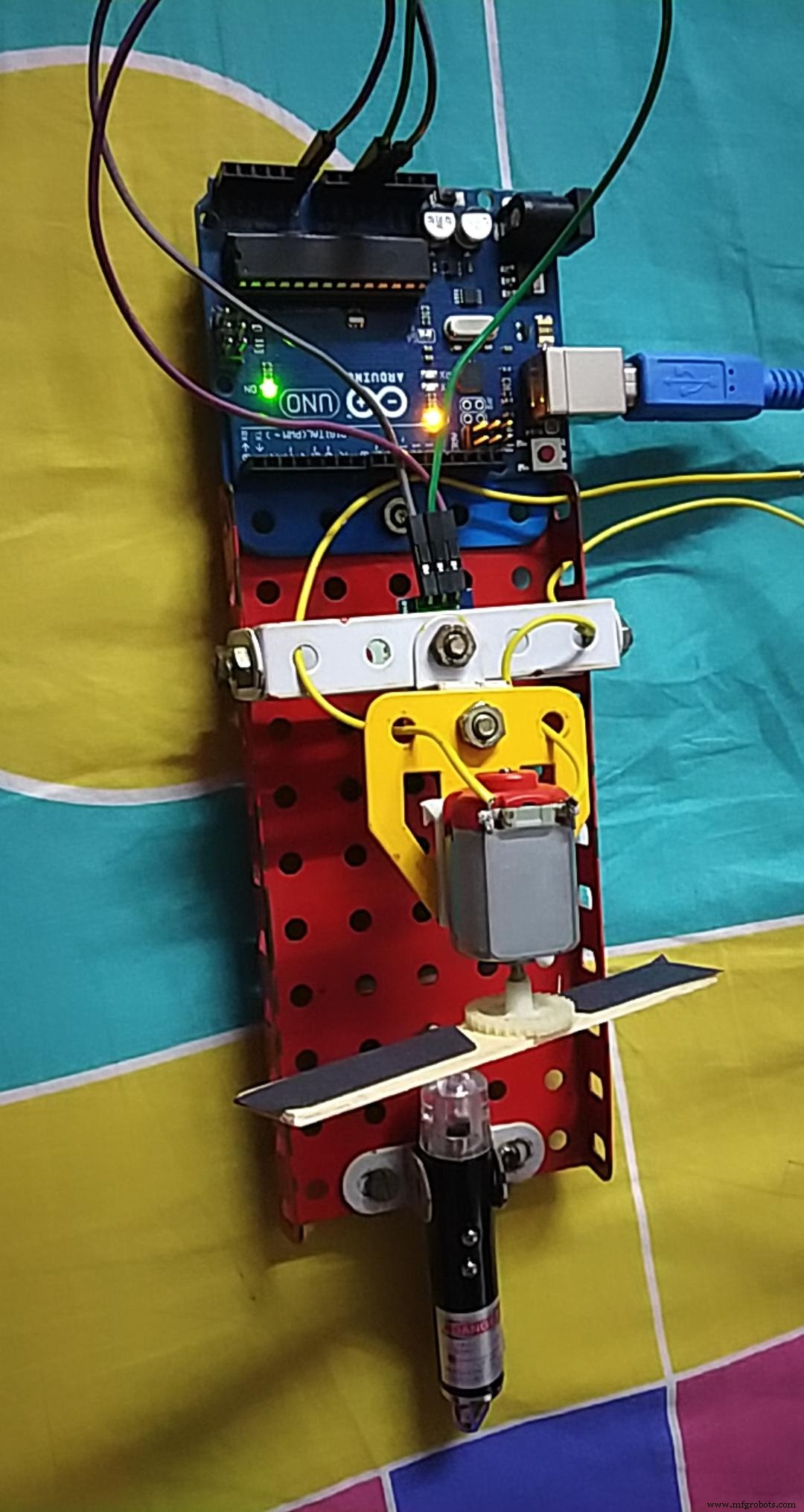
이 프로젝트는에서 개발되었습니다. 긁힘 정확한 RPM을 측정하기 위한 시도(회전 수 당 단일 IR을 사용하는 다양한 모터의 분)값 센서, Arduino 보드 및 필수 주요 재료 - 레이저 포인터(빨간색 필요).
이 프로젝트는 IR 센서가 적색 레이저에서 방출되는 적은 수의 IR 방사도 읽는다는 사실을 이용합니다. 그러나 청색/녹색 레이저가 사용될 때 이러한 IR 방사는 매우 줄어들고 아날로그 판독 전압은 약 100%까지 떨어집니다. 0.
모터에 부착된 팬의 블레이드가 레이저 빔의 경로로 들어오면 경로를 차단하고 판독 값이 0으로 떨어집니다. 팬 블레이드는 계속 회전하고 일정한 전원 공급으로 위치가 계속 변경됩니다. 지속적인 경로 변경이 발생합니다. 경로가 다시 명확해지면 레이저 포인터 빔이 센서를 다시 공격합니다.
더 빠르고 더 많은 변화에 대한 적응 측정을 위한 새로운 싱글 샷 알고리즘 기반 코드:-
내가 개발한 이 프로젝트의 코드는 이 프로젝트를 위해 새로 개발된 알고리즘을 사용합니다. 알고리즘은 실로 고유하며 40밀리초 이내에 측정을 수행하고 정확한 결과를 제공하도록 구축되었습니다. 이 프로그램의 매우 중요한 기능 중 하나는 제가 Arduino용 단일 샷 감지라고 부르는 방법을 사용한다는 것입니다. 팬 블레이드가 레이저 빔의 경로에 장애물을 만들 때마다 모터의 RPM을 계산합니다. 이는 레이저 빔의 경로가 막히면 팬에 있는 n개의 블레이드에 대해 1/n의 완전한 회전을 표시하기 때문입니다. 따라서 프로그램은 매우 민감한 ~으로 RPM의 미세한 변화( 소수점 이하 2자리) 모든 1/n 그 혁명 의 팬 칼날 다시 어디서 n 이다 숫자 의 블레이드 의 팬. 따라서 이 고유한 단일 샷 감지 알고리즘은 매우 정확한 결과를 제공합니다. 가치 의 RPM 및 측정 변화에 대한 더 높은 민감도
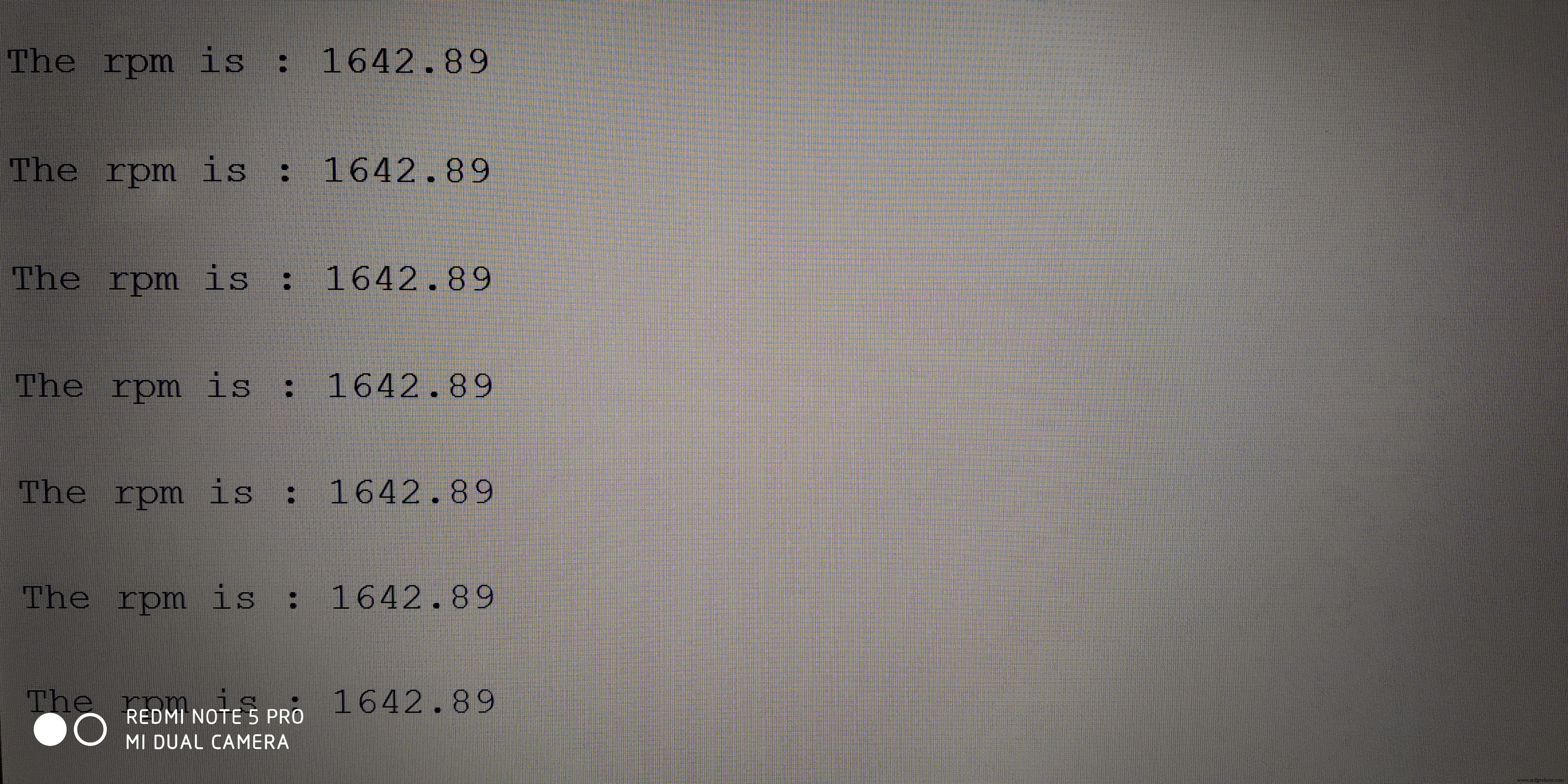
안 위 표시됨 이미지 의 한 출력 샘플 에서 일련번호 모니터 안 a 테스트 달리다, 요율 의 출력 심사 할 수 있음 명확하게 되다 본 어떤 이다 정보 2 회 a 초. RPM 가치 있다 계산됨 최대 둘 장소 의 소수점 각 시간.
이것을 보는 모든 사람은 이 프로젝트를 한 번 시도하고 소중한 리뷰를 공유해야 합니다. 이 알고리즘과 관련된 실험 및 결과에 대해 이야기하십시오. 새로운 프로젝트에 대한 제안은 댓글 섹션에서 환영합니다. 프로젝트가 마음에 들면 존중하십시오.
이 링크(https://create.arduino.cc/projecthub/YASH36)를 탭하여 내 프로필을 팔로우하세요. @YASH36 새로운 프로젝트 업데이트를 위해.
그때까지 안심하시고 아두이노를 즐기세요!!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">//YaSh.int sen =A0;const float wid =0.012의 코드입니다. //필요에 따라 팬 블레이드의 너비를 조정합니다.const float rad =0.045; //팬에서 감지 지점의 반경을 조정합니다. blade.const float konst =6.2832; // 2*pi.float time_1;float time_2;float vel;float diff;float tnet;float rpm;void setup() { Serial.begin(9600); 핀모드(센,입력); Serial.print(" \n 최소 3초 전에 모터를 시작하십시오.\n"); 지연(3000);} 무효 루프(){ if(analogRead(sen)<950) { time_1 =millis(); 지연(30); } if(analogRead(sen)>950) { time_2 =millis(); diff =(time_2-time_1); vel =너비/차이 //회전 속도 tnet =(konst*rad)/vel; //시간 =(2*pi*반경)/속도. rpm =(60000)/tnet; // ms 단위의 시간을 분으로 변환한 다음 rpm으로 변환 단계. }Serial.print("\n rpm은 :"); 직렬.println(rpm);} 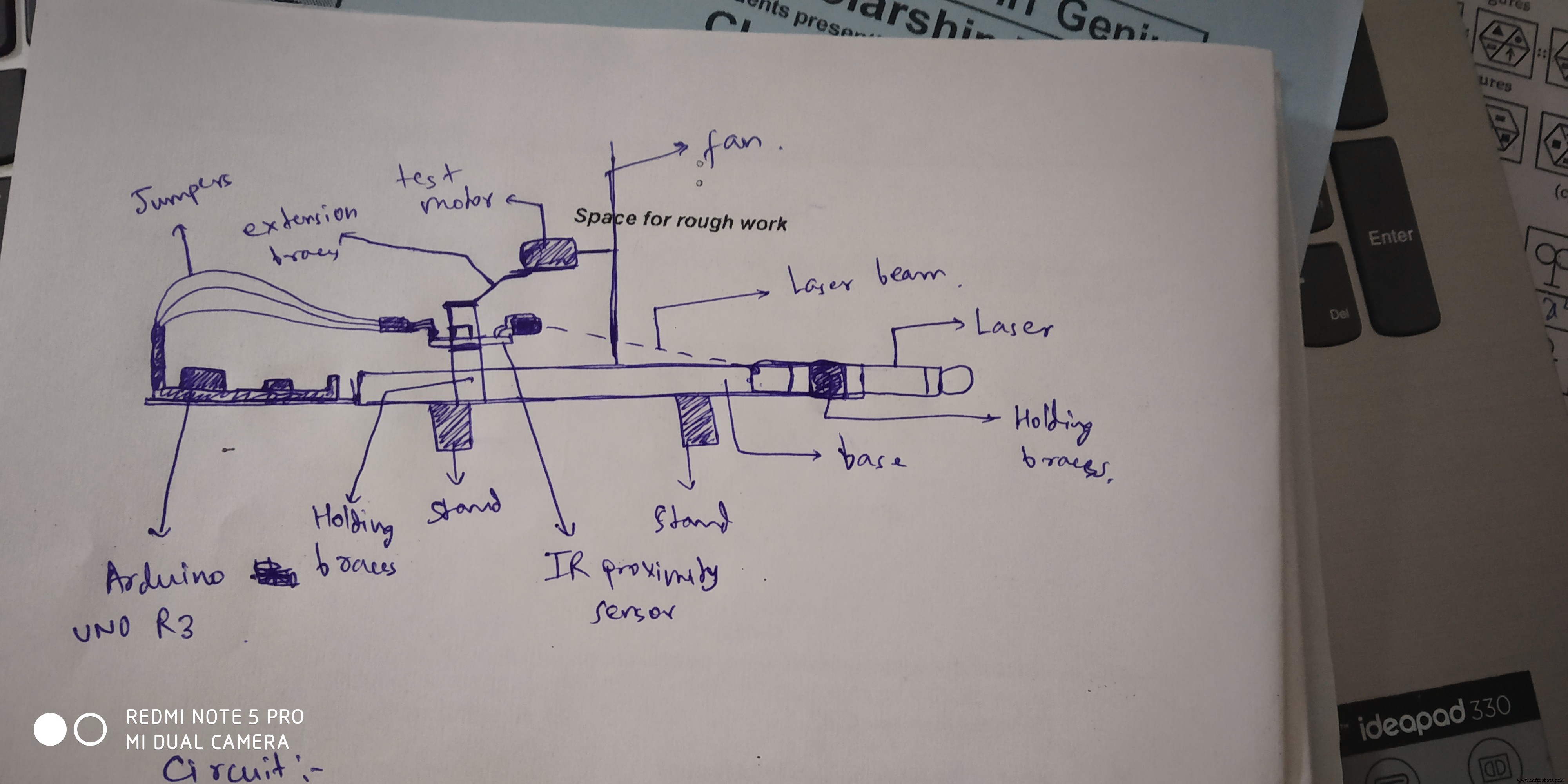 센서를 arduino 보드에 연결하기 위한 회로도
센서를 arduino 보드에 연결하기 위한 회로도 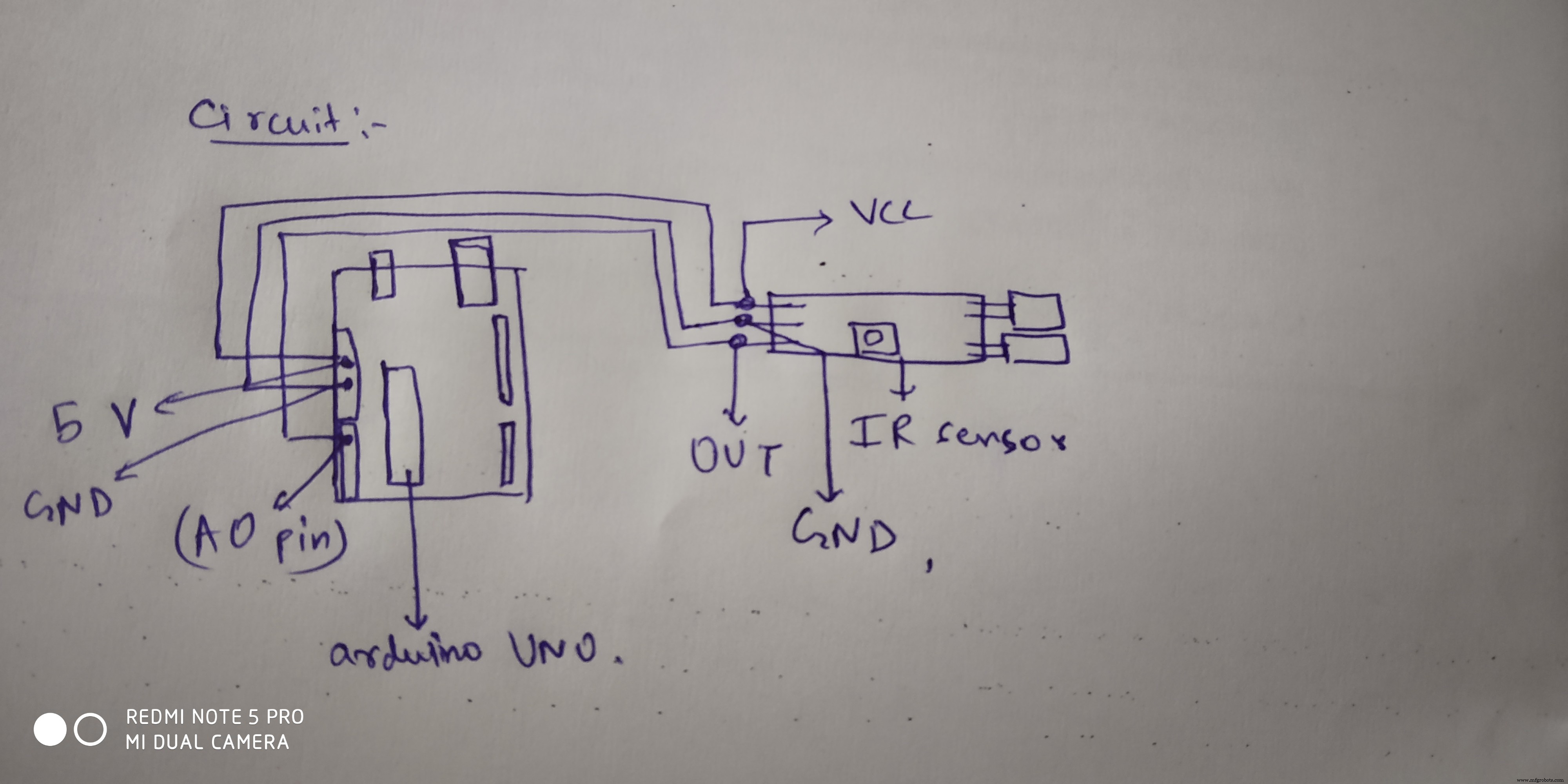
제조공정
이 Arduino 튜토리얼에서는 PIR 센서가 작동하는 방식과 모션 감지를 위해 Arduino 보드와 함께 사용하는 방법을 배웁니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 작동 방식 먼저 작동 원리를 설명하겠습니다. 모듈은 실제로 열에 노출될 때 에너지를 생성하는 초전기 센서로 구성됩니다. 즉, 사람이나 동물의 몸이 센서 범위에 들어가면 사람이나 동물의 몸이 적외선 형태의 열 에너지를 방출하기 때문에 움직임을 감지합니다. 여기서 센서의 이름인 수동적외선(Passive Infra-Red) 센서
음주 운전은 거의 모든 국가에서 심각한 범죄입니다. 따라서 혈중 알코올 농도를 확인하는 것은 경찰에게 중요한 과정입니다. 알코올 센서를 통해 알코올 함량을 테스트하고 일반적인 마이크로 컨트롤러를 사용하여 이 장치를 설계하는 방법에 대해 자세히 설명합니다. 알코올 센서란 무엇입니까? 그림 1:안경에 든 호흡 분석기와 알코올 센서는 에탄올의 가스 농도를 측정하고 그 결과를 아날로그 출력으로 표시하는 전자 장치입니다. MQ3 센서는 금속 산화물 반도체가 포함된 MQ 에디션의 인기 있는 알코올 센서입니다. 또한 MQ3 센서는