

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 |
 |
|
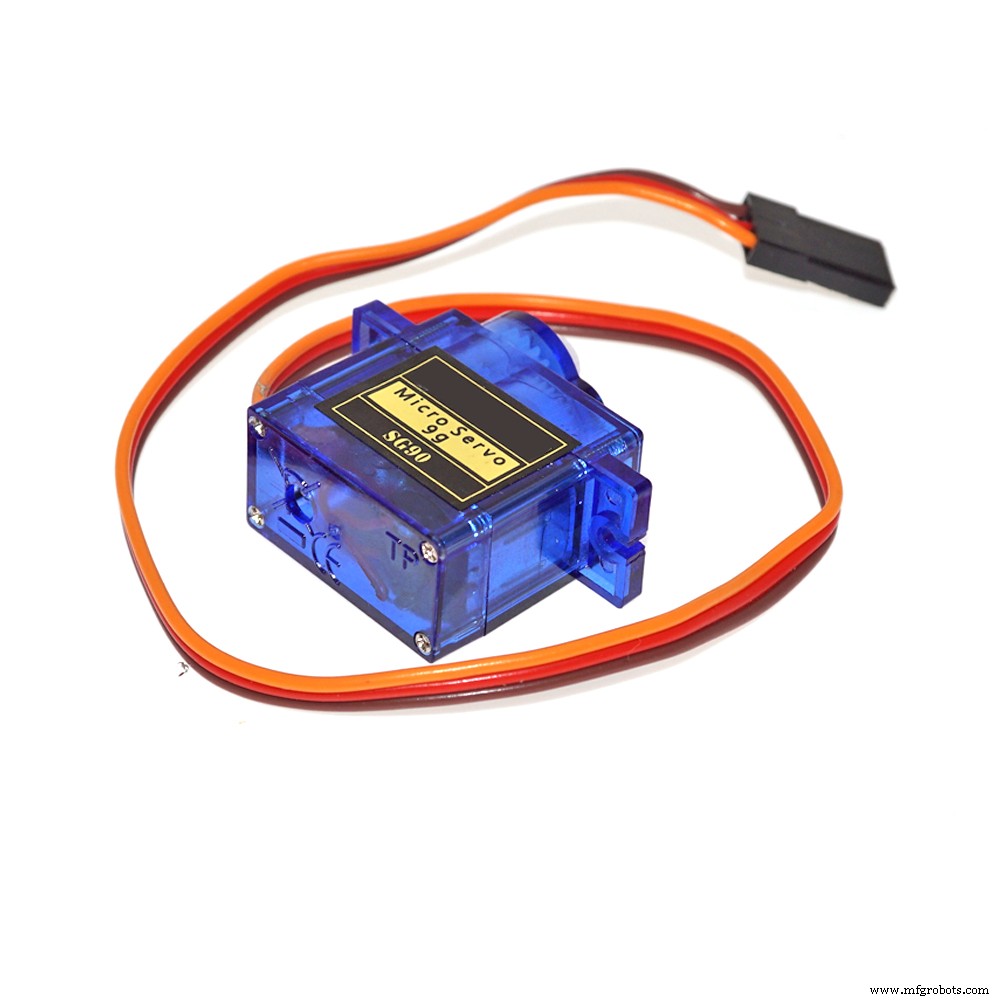
이 프로젝트는 일반 인터넷 브라우저(예:Firefox)를 사용하여 Wi-Fi 네트워크에서 원격으로 일부 서보 모터를 제어하는 방법을 보여줍니다. 이것은 장난감, 로봇, 드론, 카메라 팬/틸트 등 여러 애플리케이션에서 사용될 수 있습니다.
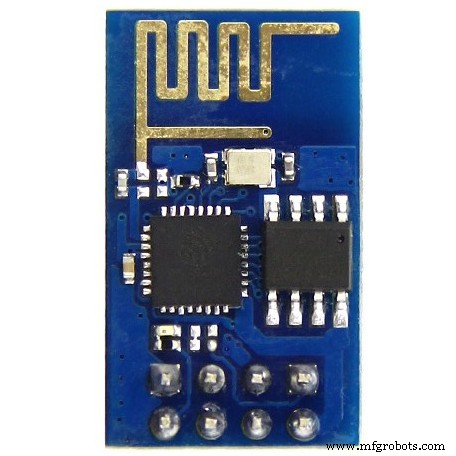
모터는 ESP-8266 모듈을 통해 Wi-Fi 네트워크를 연결하는 Arduino Uno에 부착되었습니다. 컨트롤 인터페이스는 HTML과 jQuery로 디자인되었습니다.
ESP-8266을 사용하여 LED를 켜고 끄는 방법을 보여주는 Miguel의 튜토리얼(http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/)이 이에 대한 영감을 주었습니다. 게시물.
여기에 표시된 기술은 내 프로젝트 중 하나인 "Robô da Alegria"에서 사용됩니다. 다음 링크 중 하나에서 이에 대한 자세한 내용을 찾을 수 있습니다.
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
1단계:전자 제품

이 프로젝트에는 다음 구성 요소가 필요합니다.
<울>이 프로젝트를 조립하는 데 특정 도구가 필요하지 않습니다. 모든 구성 요소는 즐겨 찾는 전자 상거래 상점에서 온라인으로 찾을 수 있습니다. 회로는 USB 포트(컴퓨터 또는 일반 전화 충전기에 연결됨)에 의해 전원이 공급되지만 Arduino 전원 잭에 연결된 외부 DC 전원 공급 장치 또는 배터리를 추가할 수도 있습니다.
2단계:조립
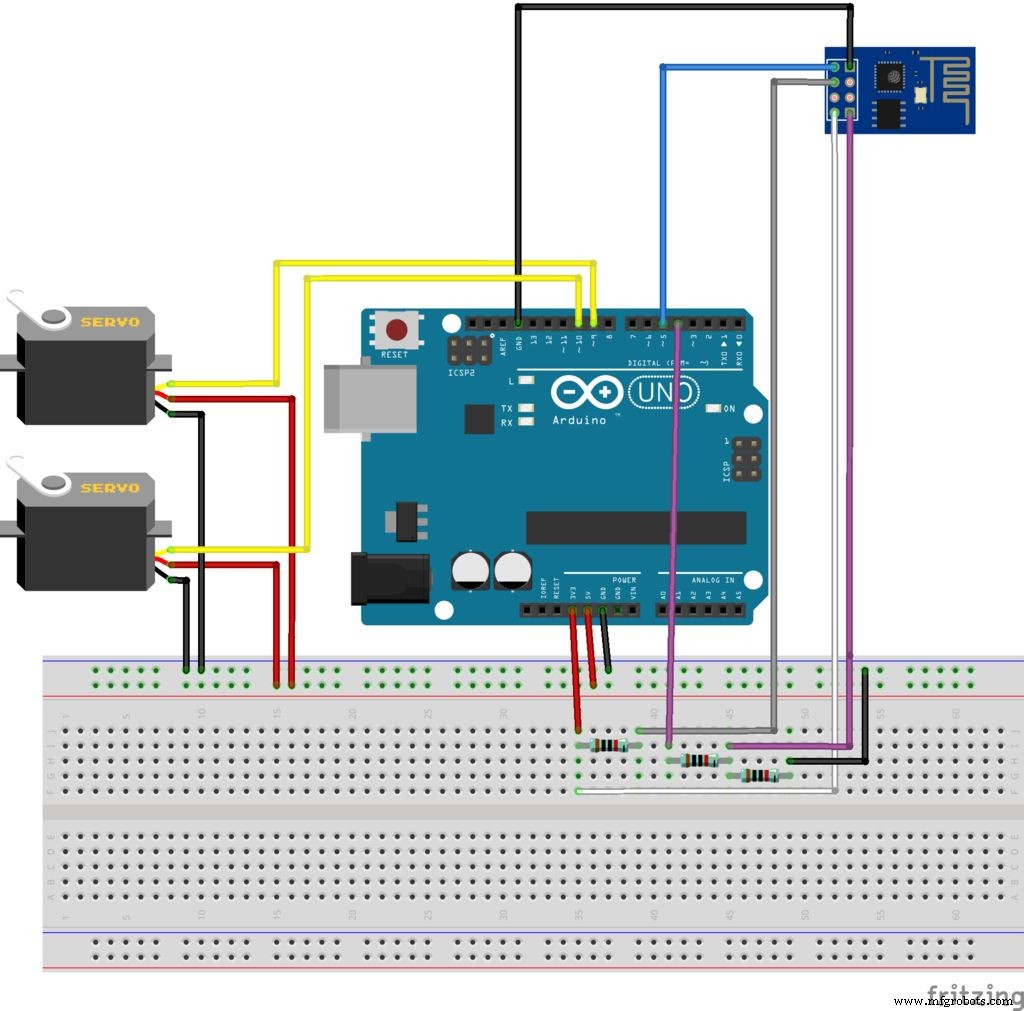
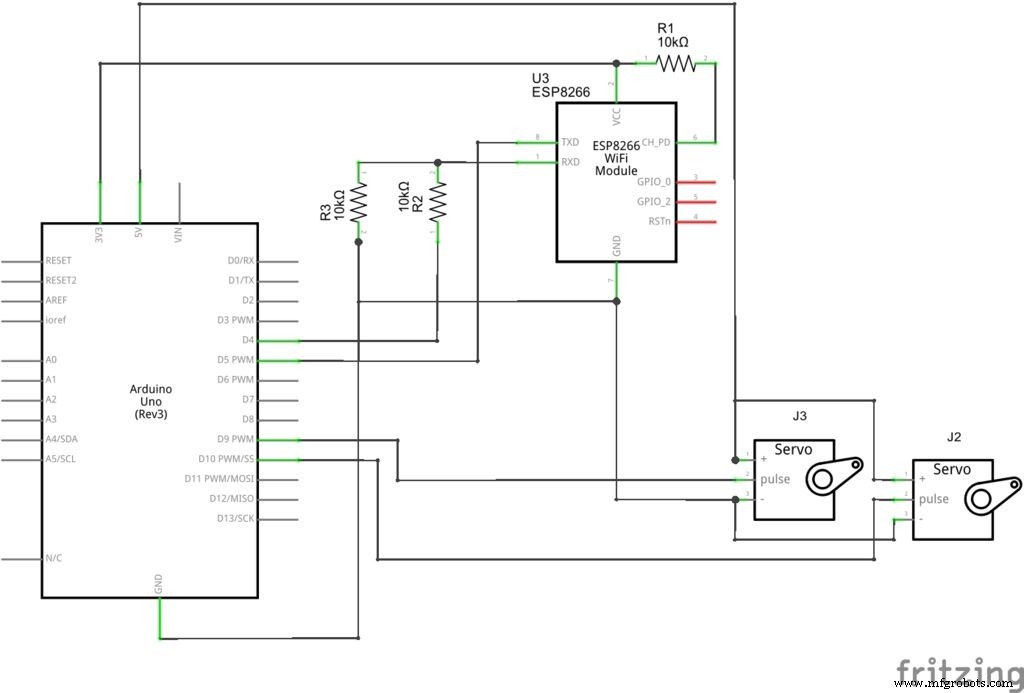
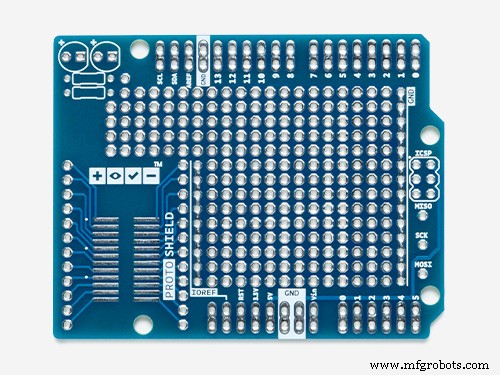
회로도에 따라 모든 구성 요소를 연결합니다. ESP-8266 모듈과 서보 모터를 연결하려면 점퍼 와이어가 필요합니다. 프로토 실드(보다 컴팩트한 회로용), 일반 브레드보드를 사용하거나 Arduino 실드를 소유한 디자인을 사용할 수 있습니다.
USB 케이블을 Arduino Uno 보드에 연결하고 다음 단계로 진행합니다.
3단계:Arduino 코드
최신 Arduino IDE를 설치합니다. 이 프로젝트에서는 서보 제어를 위해 서보.h 라이브러리가 사용되었습니다. 코드를 업로드하는 동안 Wi-Fi 모듈과 컴퓨터의 USB 포트 간의 충돌을 피하기 위해 softserial 라이브러리를 사용했습니다. ESP-8266 모듈과의 통신을 위해 추가 라이브러리가 필요하지 않았습니다. ESP8266의 전송 속도를 확인하고 코드에서 올바르게 설정하십시오.
일부 서보 모터는 위치가 한계(0도 및 180도)에 가까울 때 떨리기 시작하고 이상한 소음을 냅니다. 이를 피하기 위해 Arduino 코드와 제어 인터페이스(나중에)에서 각도를 10도에서 170도 사이로 제한했습니다.
유감스럽게도 servo.h 라이브러리 및 softserial.h 라이브러리는 마이크로 컨트롤러의 동일한 타이머를 사용합니다. 이것은 Arduino가 ESP-8266과 통신할 때마다 서보에서 지터를 유발할 수 있습니다. 이를 피하기 위해 각 명령 후에 서보가 Arduino에서 분리됩니다. 모듈을 표준 직렬 핀에 연결할 수도 있습니다. 이 경우 업로드할 때마다 모듈의 연결을 끊는 것을 잊지 마십시오.
Arduino 코드 다운로드(wi-servo.ino ) XXXXX를 Wi-Fi 라우터 SSID로, YYYYY를 라우터 비밀번호로 바꿉니다. Arduino 보드를 컴퓨터 USB 포트에 연결하고 코드를 업로드합니다.
4단계:인터페이스
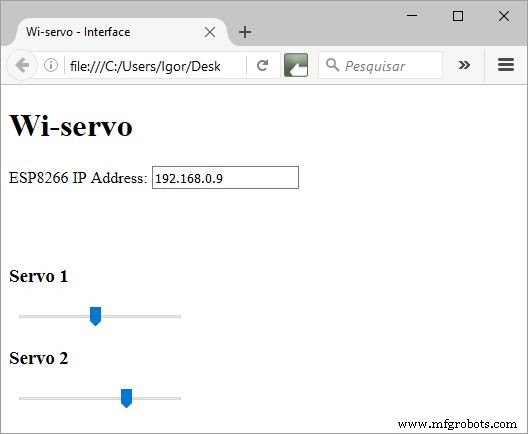
HTML 인터페이스는 서보 모터의 제어를 위해 설계되었습니다. 이 예에서는 두 개의 서보가 사용되었지만 Arduino Uno에 더 많은 서보를 추가할 수 있습니다(최대 4개의 모터를 테스트했습니다).
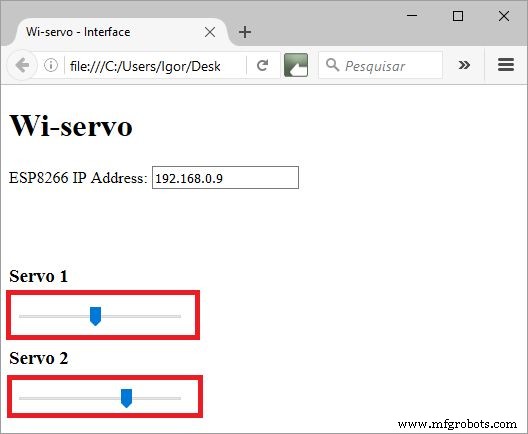
텍스트 상자 형식은 ESP 모듈의 IP 주소를 입력하는 데 사용됩니다. Wi-servo.html 다운로드 및 jquery.js 파일을 모두 같은 폴더에 저장합니다.
5단계:사용
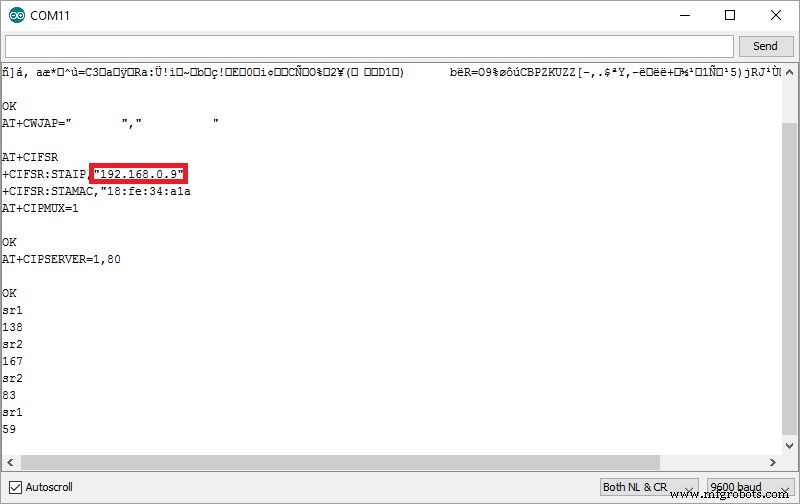
Arduino가 다시 시작되면 Wi-Fi 네트워크에 자동으로 연결을 시도합니다. 직렬 모니터를 사용하여 연결이 성공했는지 확인하고 라우터가 ESP-8266에 할당한 IP를 확인하십시오.
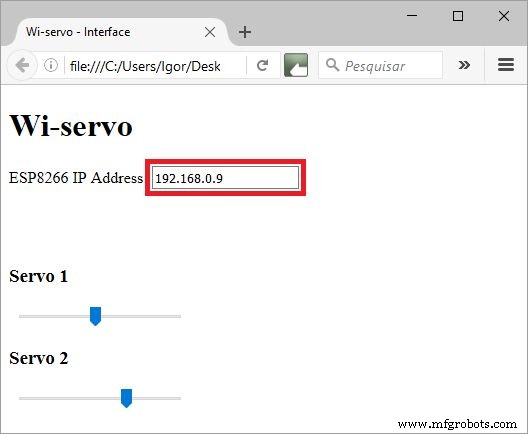
인터넷 브라우저(Firefox)에서 html 파일을 엽니다.
텍스트 상자에 ESP-8266의 IP 주소를 입력하면 준비가 완료됩니다. 슬라이더를 사용하여 각 서보에 대해 원하는 각도를 선택합니다. 마우스 버튼을 놓으면 브라우저가 자동으로 Arduino에 요청을 보내고 각 서보를 이동합니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">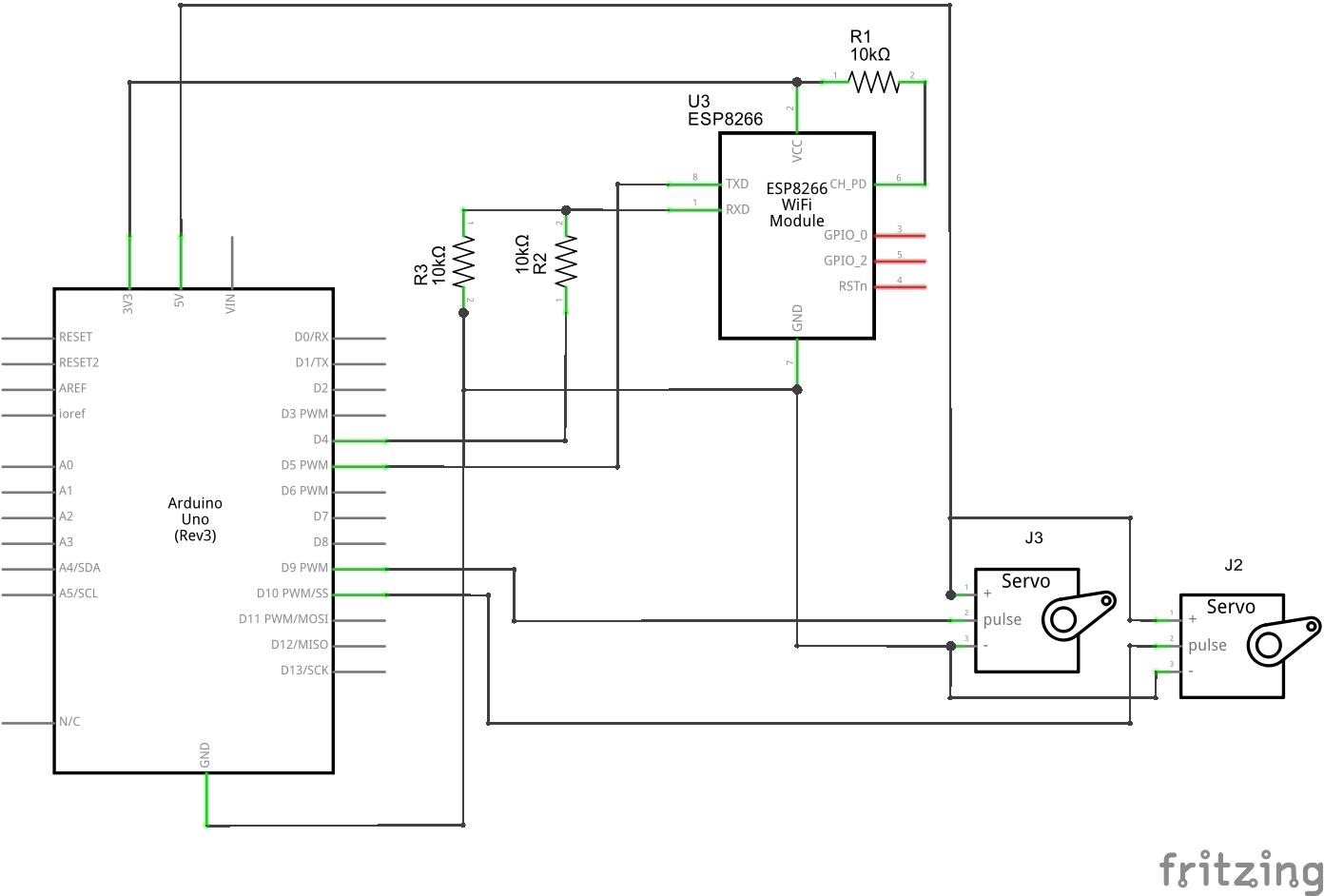
제조공정
구성품 및 소모품 Arduino Mega 2560 × 1 Adafruit 2핀 LCD 디스플레이 × 1 24V 전원 공급 장치 × 1 Adafruit 힘 센서 × 1 팝 범퍼 어셈블리 × 1 팝 범퍼 스위치 × 1 대상 스위치 × 1 롤오버 스위치 × 1 플리퍼 어셈블리 × 1 LED 램프 × 1 이 프로젝트 정보 Arduino 제어 핀
구성품 및 소모품 Arduino UNO × 1 Microchip Technology ATtiny85 × 1 전해 디커플링 커패시터 - 10uF/25V × 1 점퍼 와이어 M/M × 1 이 프로젝트 정보 저는 다른 위치에서 여러 센서 데이터를 읽어야 하는 프로젝트를 진행 중입니다. 여기에는 몇 개의 PWM 핀만 필요하므로 여러 Arduino Uno를 사용하는 것은 비용이 많이 들고 불필요합니다. 그래서 Arduino Uno 개발 보드 대신 A