

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
 |
|
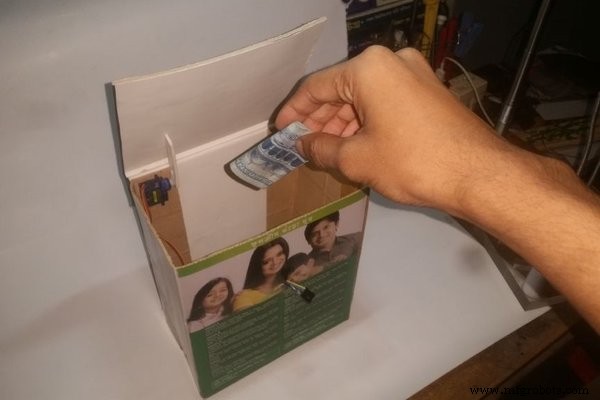
모든 것이 더 똑똑해지고 있죠? 그럼 쓰레기통은 왜 안되나요? 이 쓰레기통은 앞에 쓰레기가 보이면 뚜껑을 열고 닫습니다. 쓰레기를 가져가기만 하면 자동으로 열리고 사용자가 더 먹일 때까지 기다렸다가 일정 시간이 지나면 자동으로 닫힙니다. 동영상을 보고 정확히 무엇을 할 수 있는지 알아보세요.
시작하겠습니다.
1단계:구성요소



(2개 더 많은 이미지)
<울>
2단계:회로 구축
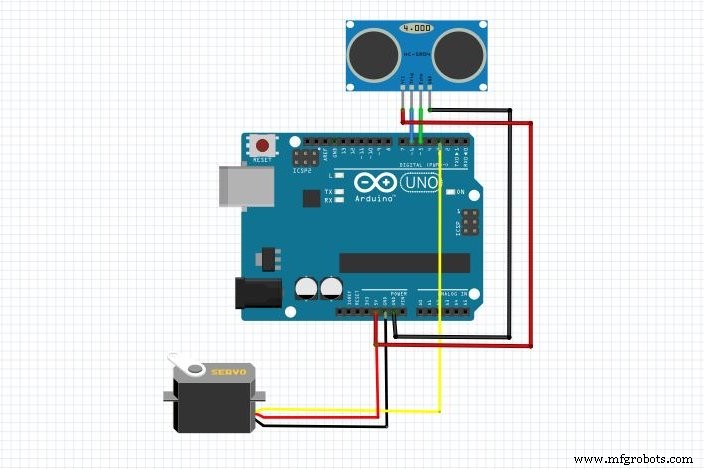
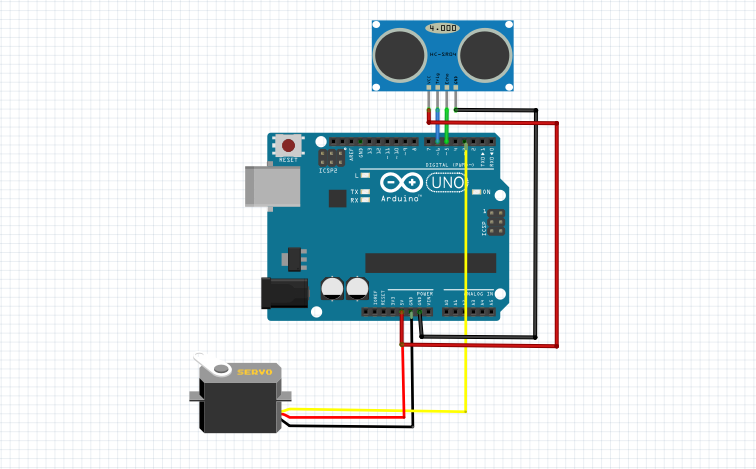
회로는 너무 쉽습니다. 서보와 소나는 전력을 덜 소모하므로 Arduino 5v 소스에서 직접 전원을 공급할 수 있습니다. 7.4V DC 이상 또는 최소 7v로 Arduino에 전원을 공급하는 것을 잊지 마십시오.
<울>
3단계:서보 암 연결



이 서보 암을 뜨거운 접착제나 다른 접착제로 긴 판지 조각에 연결하기만 하면 됩니다. 판지 대신 아이스크림 스틱을 사용할 수도 있습니다. 그런 다음 긴 서보 암을 서보 모터에 연결합니다.
4단계:휴지통에 서보 및 소나 센서 추가



이와 같이 소나 센서를 통을 향하도록 연결합니다. 그런 다음 그림 2와 3과 같이 서보 모터를 추가하여 서보가 위로 회전할 수 있도록 합니다.
5단계:코드
코드 링크:https://github.com/ashraf-minhaj/Trash-bot
나는 Arduino를 프로그래밍하여 50cm 범위의 쓰레기(말 그대로 무엇이든)를 보면 서보가 50도가 되어 빈의 상단 뚜껑에 부딪혀 상단 뚜껑이 열리고 3초 동안 기다립니다. 그런 다음 자동으로 160도 회전하여 상단 덮개가 닫힙니다. 이제 자동 열기/닫기 휴지통이 보입니다.
#include서보 서보;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); 핀모드(에코핀, 입력); Servo.attach(3);} 무효 루프(){ int 지속 시간, 거리;digitalWrite(trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW);// 반향에서 펄스 입력을 측정합니다. pinduration =pulseIn(echoPin, HIGH);// 거리는 지속 시간의 절반을 29.1로 나눈 값입니다. (데이터 시트에서)distance =(duration/2) / 29.1;// 거리가 0.5미터 미만이고 0보다 큰 경우(0 이하는 범위 초과를 의미함) if (distance <=50 &&distance>=0) { servo.write(50); 지연(3000);} else { 서보.쓰기(160);}
6단계:완료되었습니다

이제 7v 이상으로 Arduino에 전원을 공급하면 쓰레기통 로봇이 생깁니다.
감사합니다.
[제 작업이 마음에 드시면 YouTube 채널을 구독하여 지원해 주세요.]
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
#include서보 서보;int const trigPin =6;int const echoPin =5;void setup(){pinMode(trigPin, OUTPUT); 핀모드(에코핀, 입력); Servo.attach(3);} 무효 루프(){ int 지속 시간, 거리;digitalWrite(trigPin, HIGH); delay(1);digitalWrite(trigPin, LOW);// 에코에서 펄스 입력을 측정합니다. pinduration =pulseIn(echoPin, HIGH);// 거리는 지속 시간의 절반을 29.1로 나눈 값입니다. (데이터시트에서)distance =(duration/2) / 29.1;// 거리가 0.5미터 미만이고 0보다 큰 경우(0 이하는 범위 초과를 의미함) if (distance <=50 &&distance>=0) { servo.write(50); delay(3000);} else { servo.write(160);}// 60ms를 기다려도 onedelay(60);}
제조공정
이 기사에서는 Arduino 색상 분류기를 만드는 방법을 보여 드리겠습니다. 다음 동영상을 보거나 아래에 작성된 기사를 읽을 수 있습니다. 디자인 이 Arduino 프로젝트에 필요한 것은 컬러 센서(TCS3200) 1개와 취미용 서보 모터 2개뿐입니다. 이 덕분에 이 프로젝트는 매우 간단하지만 구축하는 것은 매우 재미있습니다. 먼저 Solidworks 3D 모델링 소프트웨어를 사용하여 색상 분류기의 디자인을 만들었고 작동 원리는 다음과 같습니다. 초기에는 충전기에 고정되어 있는 컬러 주걱이 상단 서보 모터에 부착된 플랫폼으
이 Arduino 자습서에서는 Arduino 보드와 처리 개발 환경을 사용하여 이 멋진 레이더를 만드는 방법을 보여 드리겠습니다. 자세한 내용은 다음 동영상을 보거나 아래에 작성된 튜토리얼을 참조하세요. 개요 이 Arduino 프로젝트에 필요한 것은 물체를 감지하기 위한 초음파 센서, 센서를 회전시키기 위한 작은 취미 생활자 서보 모터 및 이를 제어하기 위한 Arduino 보드뿐입니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.[/column] 이 Arduino 프로젝트에 필요한 구성요소 다음 사이트에서