

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
| |||
 |
|
면책 조항:
이 프로젝트를 진행하는 동안 전자 제품이 손상되지 않았습니다.
1막:어느 좋은 날...
우리는 아침부터 일하고 있었고 손에 많은 문서와 코드 테스트가 남아 있었고 우리는 필사적으로 휴식이 필요했지만 축구를 하는 것은 우리를 영역에서 쫓아낼 것이기 때문에 이상적이지 않았습니다. 그래서 평정을 유지하기 위해 우리가 할 수 있는 일을 생각하기 시작했습니다. 그것이 우리를 편안하게 만들면서도 여전히 우리를 그 "작업 영역"에 머물게 할 것입니다. 그때 우리 매니저가 "작은 프로젝트를 만들어 Hackster에 올리지 않겠습니까?"라고 제안했습니다. 좋은 전화 프라나브.
그래서 우리는 약간의 보너스 기능(서스펜스가 중요하기 때문에 나중에 공개할 예정)이 있는 인터넷 제어 -wait-for-it- RC 로봇을 만들기로 결정했습니다.

자, 우리는 기운이 나서 사내 철물점으로 달려갔습니다.
2막:하드웨어의 숲
우리는 하드웨어 상점에 도착합니다. 그것은 당신의 눈을 탐욕으로 빛나게 하는 키트와 구성 요소로 가득 차 있습니다. 당신의 손은 그것들을 향해 당겨질 것이고 당신도 알지 못하는 사이에 8비트 계산기를 만들기 위해 부품을 납땜하게 될 것입니다. 그러나 우리는 집중했습니다. 이러한 산만함이 우리를 강요하지 않도록 하고 우리는 우리가 필요로 하는 것을 얻었습니다(당신도 그래야 합니다)
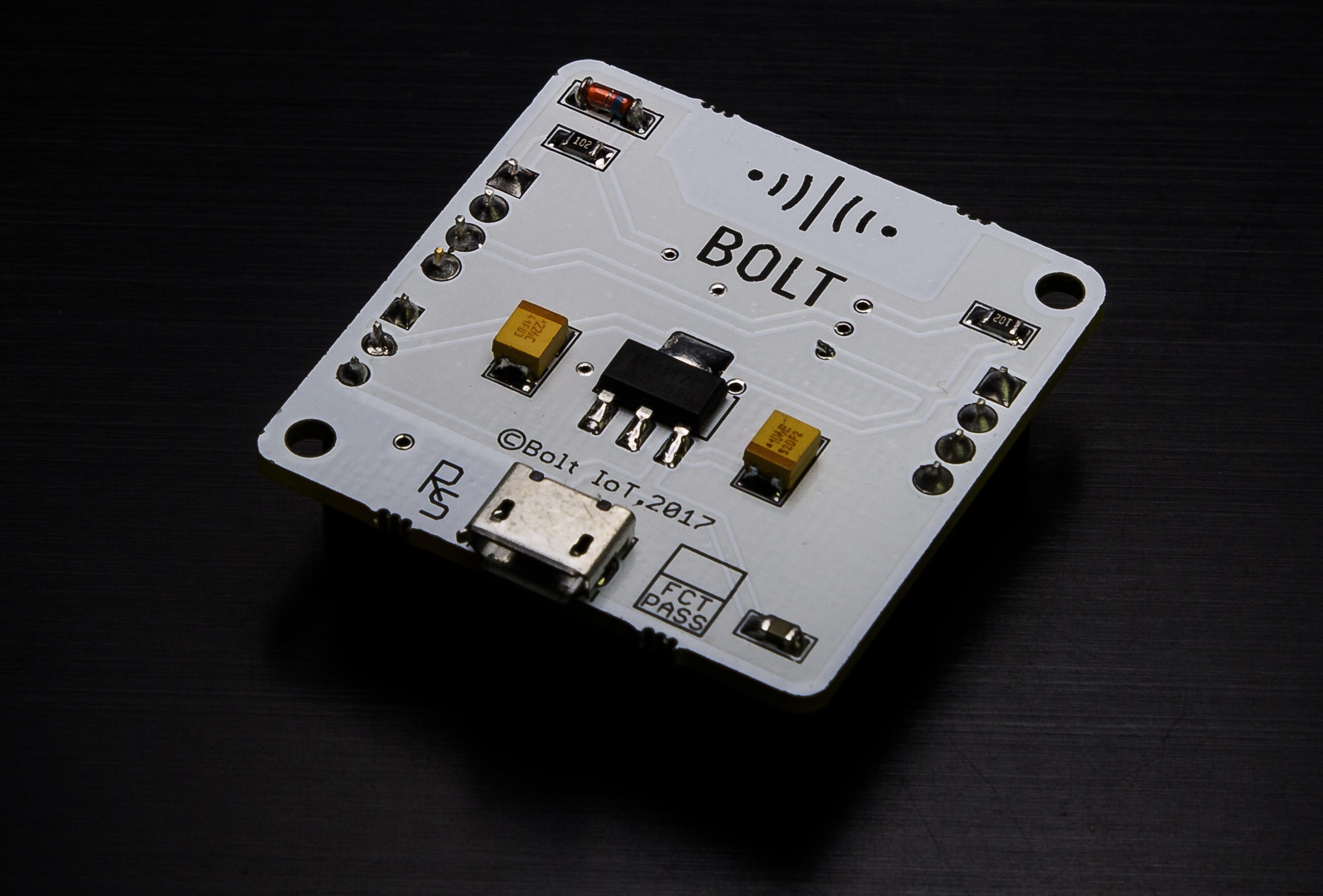
1. 볼트 와이파이 모듈

2. 기본 로봇 키트

3. Arduino UNO 또는 Boltduino


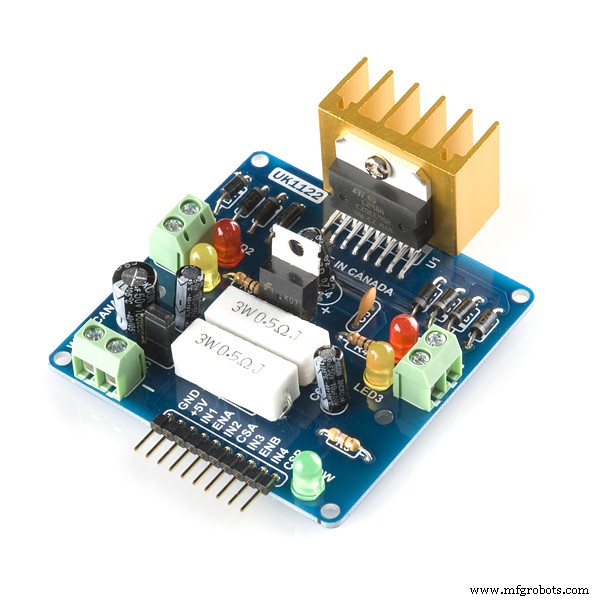
4. L298N 모터 드라이버 실드

5. 근접 센서

6. 점퍼 와이어

7. 전원 어댑터

3막:단조
우리는 필요한 모든 부품을 가지고 하드웨어의 숲에서 안전하게 돌아왔습니다. 하드웨어의 대영주 데바시시가 마법을 걸고 이 작은 로봇을 조립할 시간이었습니다.

그가 이것을 한 방법은 다음과 같습니다.
하드웨어 조립
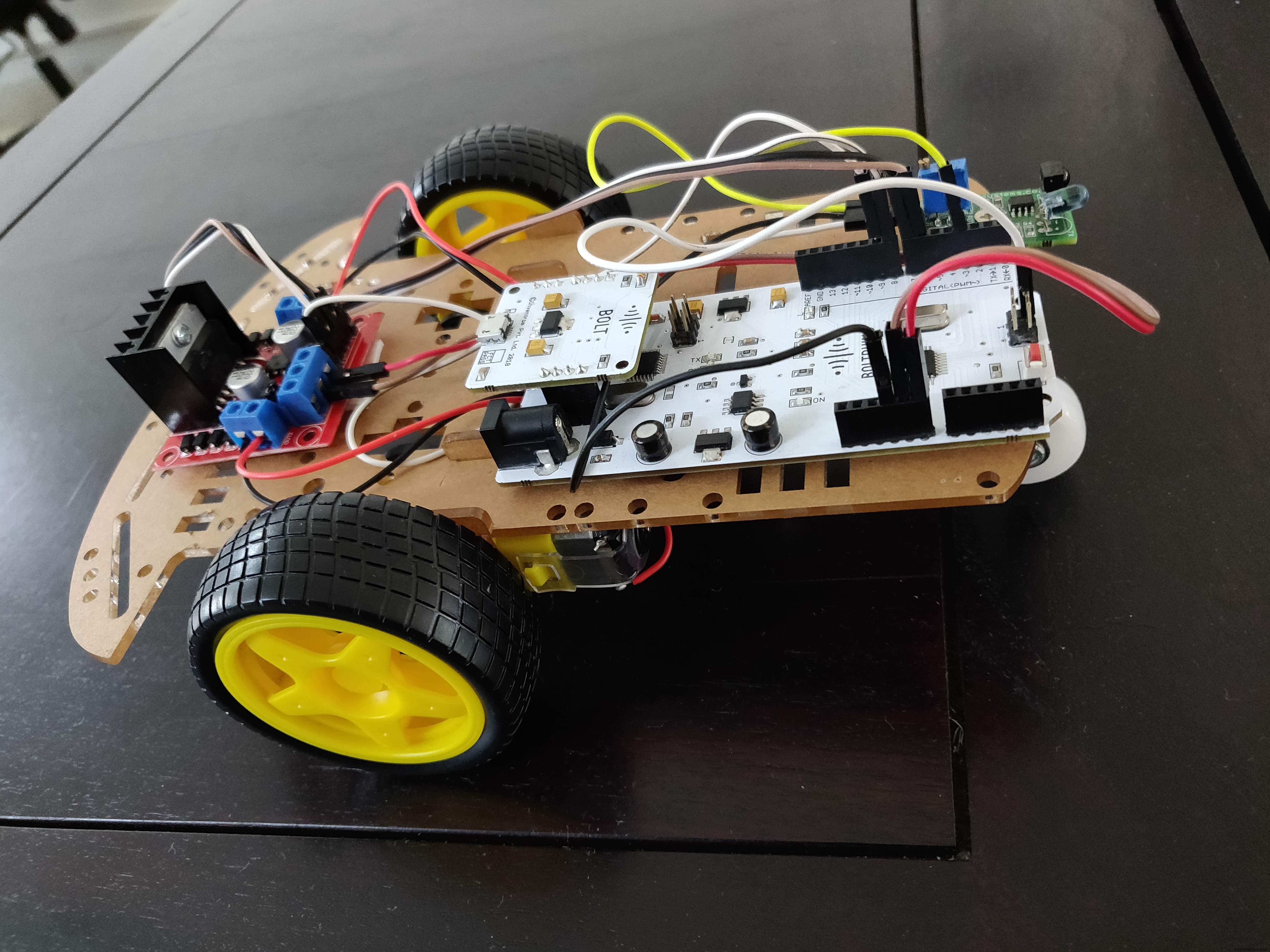
1. 그림과 같이 섀시 전면 중앙 부분에 바퀴를 부착합니다.
2. 로봇 자동차 섀시를 조립하고 그림과 같이 제공된 바퀴와 함께 너트와 볼트를 사용하여 두 개의 DC 모터를 부착합니다.
참고:전선을 섀시에 연결하기 전에 모터 단자에 납땜하십시오.
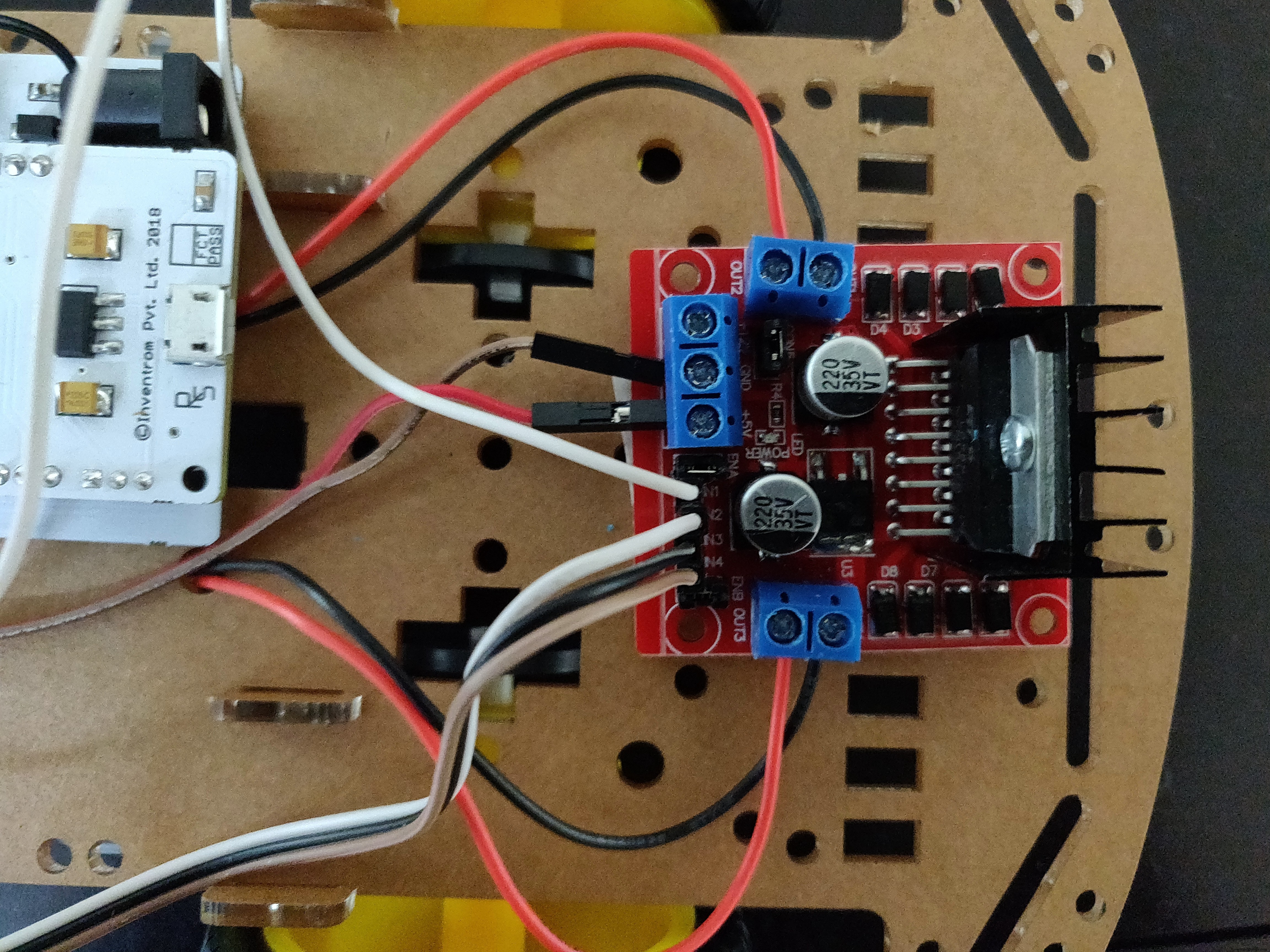
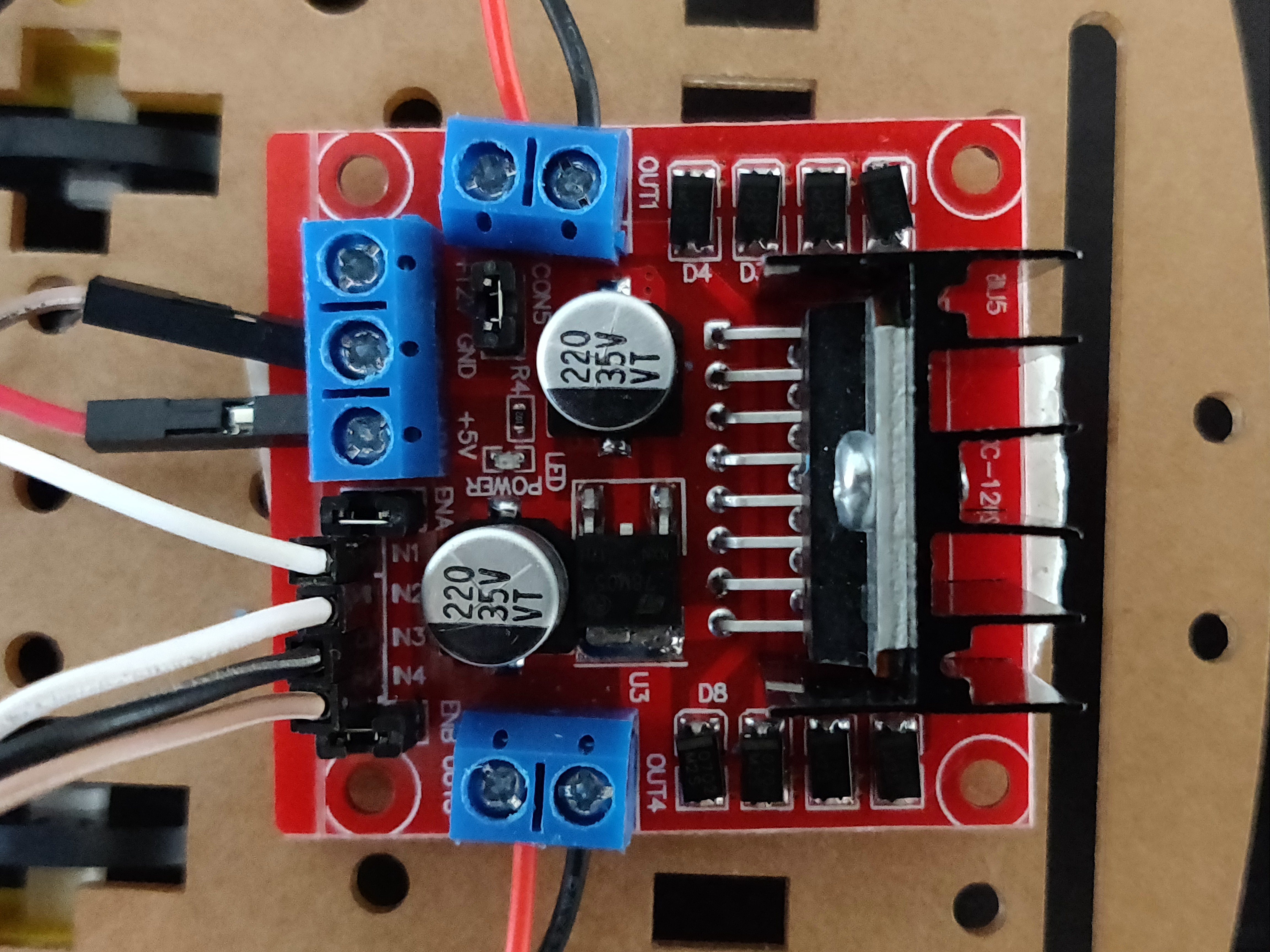
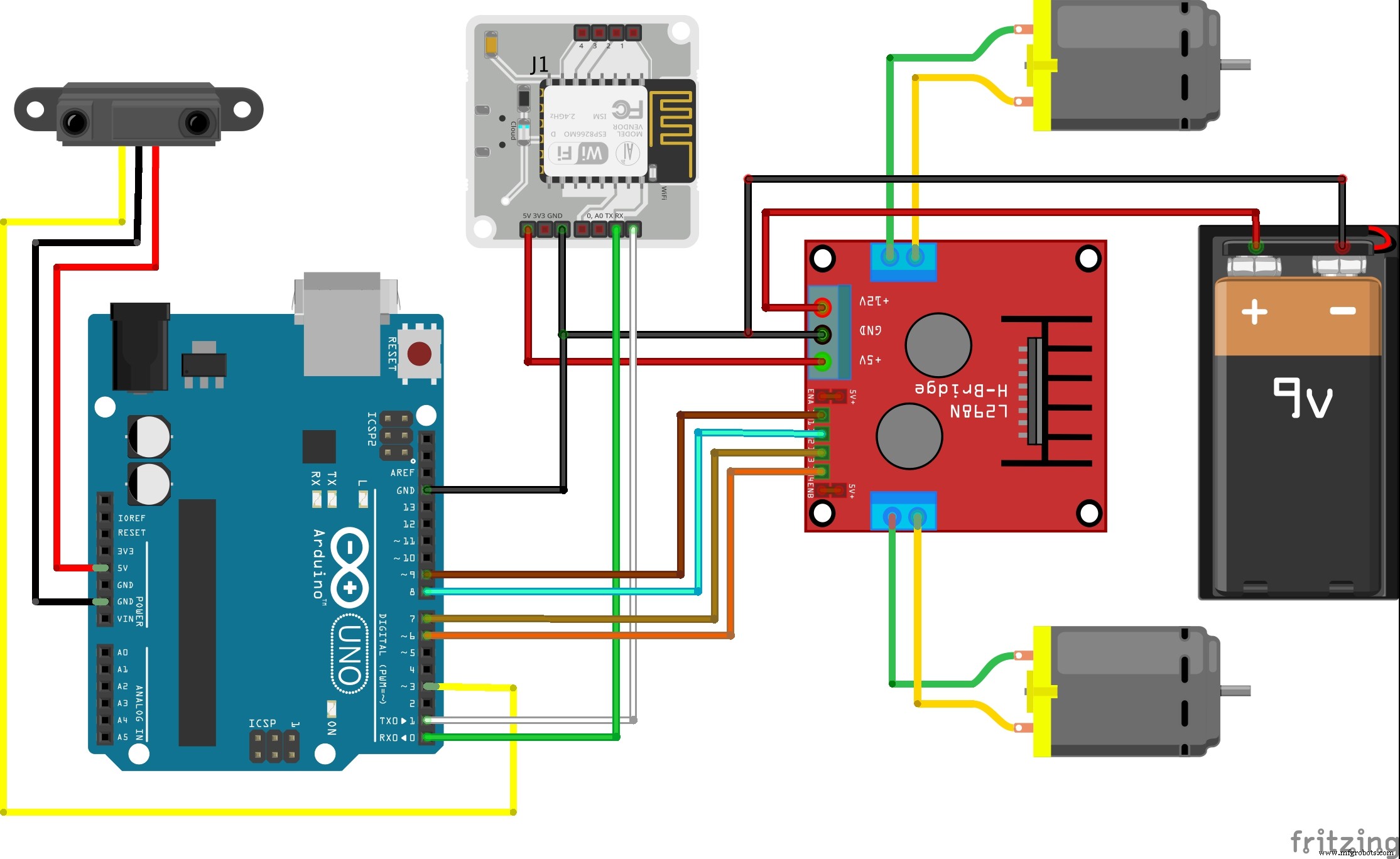
3. 이제 아래와 같이 모터의 단자를 L298N 모터 드라이버 모듈에 연결합니다.
참고:모터의 양쪽 단자를 드라이버 모듈의 같은 쪽에 연결하십시오.
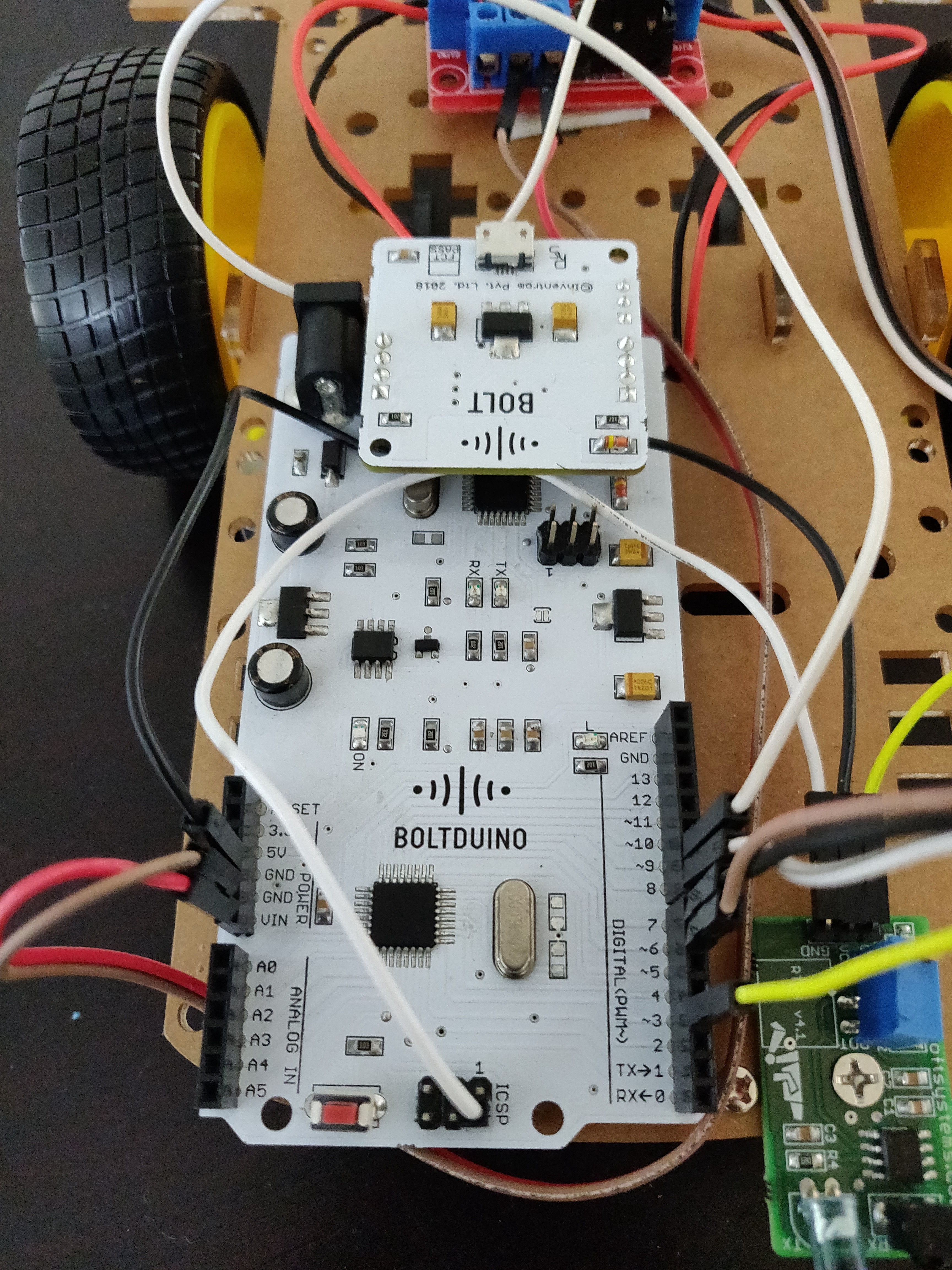
4. 드라이버 모듈의 5V 핀과 GND 핀을 아두이노의 5V와 GND에 각각 연결합니다.
5. Bolt의 5V, GND, Tx 및 Rx 핀을 Arduino의 5V, GND, Rx 및 Tx 핀에 각각 연결합니다. Boltduino의 경우, Bolt 유닛을 존재하는 슬롯에 부착하십시오.
6. 4개의 입력 단자(IN1, IN2, IN3, IN4)를 각각 핀 6, 7, 8, 9에 연결합니다.
7. 근접 센서의 5V, GND, OUT 핀을 Arduino의 5V, GND, 3번 핀에 각각 연결합니다.


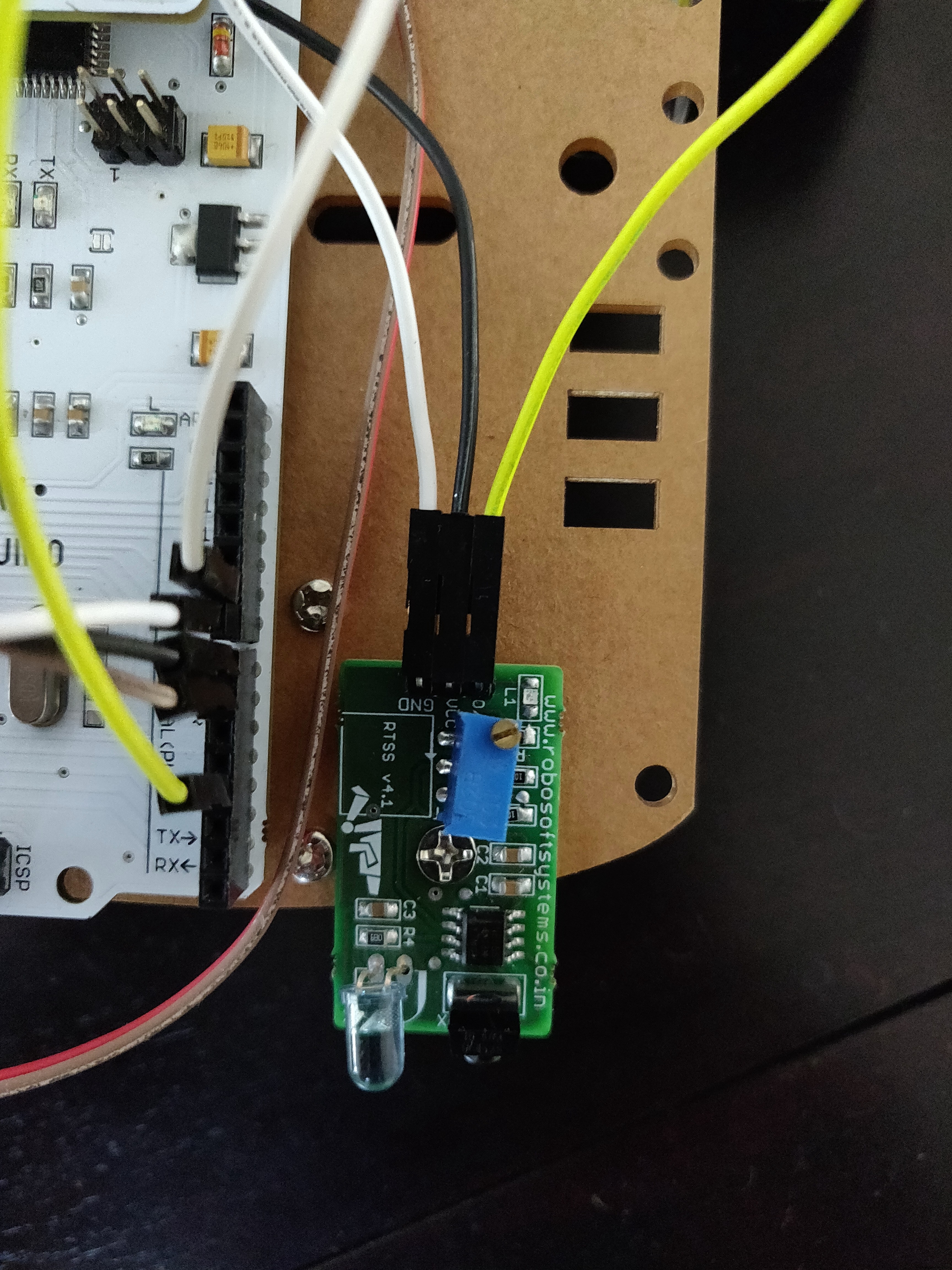
참고:모든 아래에 제공된 회로도를 살펴보는 데 도움이 됩니다.
Bolt를 클라우드에 연결
하드웨어를 조립한 후 Bolt 유닛을 Bolt Cloud에 등록하고 연결합니다. 볼트를 클라우드에 등록하고 연결하는 방법에 대해 자세히 알아보세요.
4장:그리고 연결성이 있었습니다
이제 Hardwarey의 대영주가 Kiln of Code(즉, 나)의 암살자를 위해 보냈습니다.
그는 자신의 코드로 이 로봇에 생명을 불어넣고 클라우드에 연결하는 임무를 맡았습니다. 그의 발자취를 따라 로봇도 작동하도록 하십시오.
단계 1: 얻기 코드.
이 프로젝트의 Github 저장소에서 코드를 가져옵니다. .zip 파일을 다운로드하거나 시스템에 복제할 수 있습니다.
단계 2: 일 함께 코드.
코드에는 두 부분이 있습니다.
<울>단계 3: 설정 위로 아두이노.
하드웨어 설정을 완료하고 볼트를 클라우드에 연결했으면 Bolt_Robot_Car.ino 파일에 있는 펌웨어를 업로드하세요. 당신의 아두이노에. Arduino IDE를 설정하고 Arduino에 코드를 업로드하는 방법을 알아보려면 이 링크를 따르세요.
단계 4: 컨트롤러 앱.
controller.html을 두 번 클릭합니다. 파일을 클릭하면 다음 웹페이지가 표시됩니다.
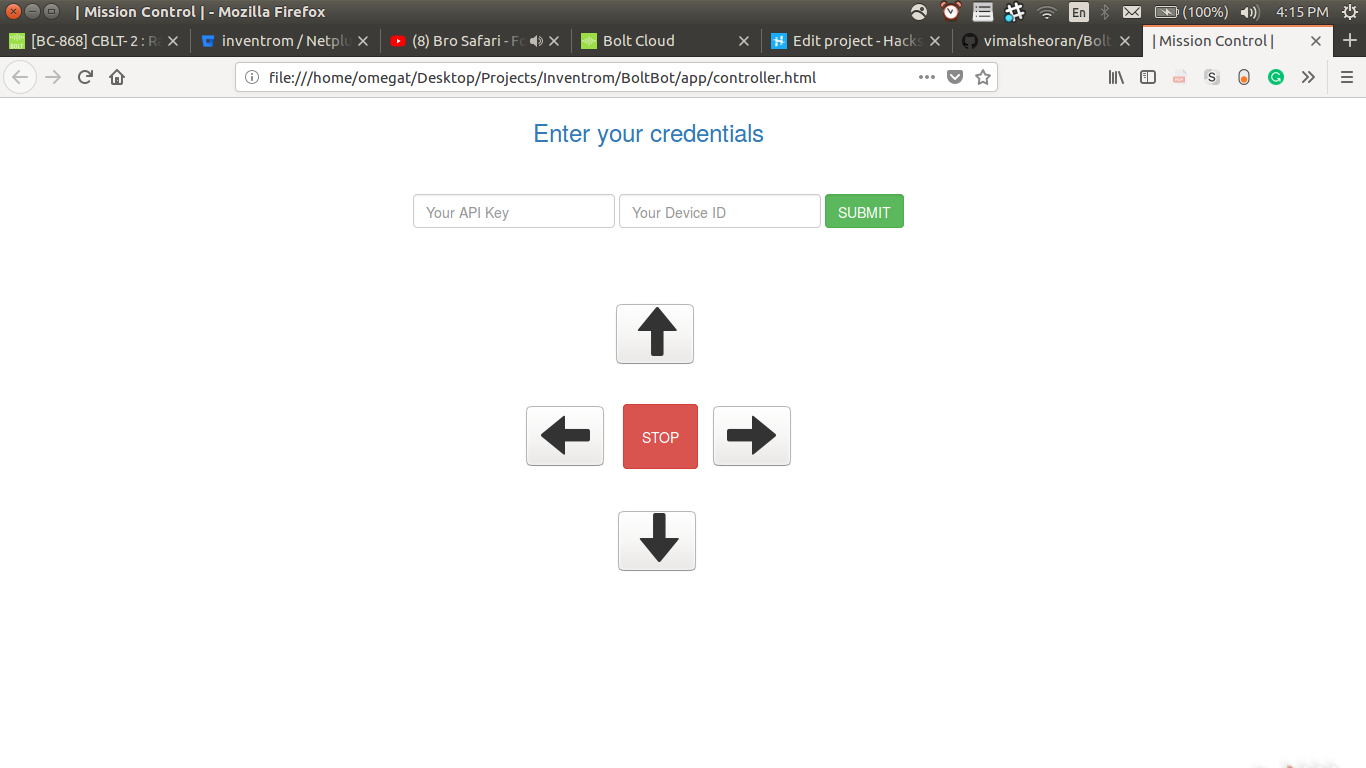
이제 API 키를 입력하세요. 및 기기 ID 해당 필드에 입력하고 제출을 누르십시오. API 키를 얻을 수 있습니다. 및 기기 ID Bolt Cloud 대시보드에서.
그런 다음 제어 버튼을 사용하여 로봇의 동작을 제어할 수 있습니다. 버튼을 누르면 특정 JavaScript 기능이 트리거됩니다(controller.js 파일 확인 ) 명령을 Bolt Cloud로 보낸 다음 Bolt WiFi 모듈로 보냅니다. 이제 RC 봇이 원하는 작업을 수행할 수 있습니다. 이것으로 여러 가지 작업을 수행할 수 있습니다. 여기에 몇 개의 센서를 부착하거나 자동으로 또는 원하는 대로 만들 수 있습니다. 그리고 당신이 엉망이더라도 걱정하지 마십시오. Maker Land의 원주민이 언제든지 당신을 돕기 위해 여기 있습니다.
5막:부활절 달걀
나는 당신 중 몇 명이 "이봐, 당신은 보너스 기능이 있다고 말했는데 그것은 어디에 있습니까?"라고 생각할 수도 있다는 것을 압니다. 글쎄요 걱정하지 마세요. 우리가 당신을 건조하게 남겨두지는 않겠지만 ActThree:Forging에서 이미 이 기능을 눈치채셨을 가능성이 높습니다. 그렇지 않은 경우 다시 살펴보십시오. 그러나 그런 시간이 있는 사람에게는 TL;DR 로봇이 장애물이나 장애물을 만나면 자동으로 멈추므로 결국 벽에 부딪히지 않도록 해야 합니다. 자, 여기까지가 이 이야기의 끝입니다. 이 비디오를 보고 이 프로젝트에 대한 비디오 자습서를 확인하십시오.
데모:
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
구성품 및 소모품 Arduino UNO × 1 12V 200rpm DC 모터 × 2 Arduino Uno용 L293D 모터 드라이브 실드 × 1 HC-05 블루투스 모듈 × 1 브레드보드(일반) × 1 점퍼 와이어(일반) × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 안녕하세요! 제어할 수 있는 모든 것이 좋습니다. 그렇지 않아? 우리 인간은 물건을
구성품 및 소모품 Arduino UNO × 1 SparkFun 3축 가속도계 브레이크아웃 - ADXL335 × 1 RF 모듈 434MHz × 1 HT12D × 1 HT12E × 1 SparkFun 듀얼 H-Bridge 모터 드라이버 L298 × 1 PCB 프로토타이핑(일반) × 1 선형 조정기(7805) × 2 DC 모터(일반) × 1 앱 및 온라인 서비스