

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
 |
|
업데이트:이 프로젝트의 업데이트된 버전은 여기에서 찾을 수 있습니다.
소개
내 손으로 모든 것을 제어할 수 있기를 바랍니다! 내 의자에 앉아서 BOSS와 같은 것들을 제어합니다. 나는 그것을 좋아할 것입니다! 그래서 마침내 손짓으로 명령을 따를 수 있는 멋진 DIY 손짓 인식 로봇이 나왔습니다. 이상하게 들리겠지만 매우 간단합니다. 제스처 제어 로봇을 만드는 것은 실제로 매우 간단합니다. 이 로봇은 RF 모듈을 사용하여 제 다른 DIY 프로젝트 RC 자동차를 개선한 것입니다.
여기에서도 로봇은 송신기와 수신기의 두 부분으로 나뉩니다. 수신기 회로는 이전 포스트의 회로와 동일하며 송신기 회로에 약간의 변경만 있습니다. 여기에서 송신기 회로를 프로그래밍해야 합니다. 그래서 저는 Arduino를 프로그래밍 플랫폼으로 사용할 것입니다. 제스처를 인식하기 위해 가속도계 센서를 사용할 것입니다. 이제 건물을 짓자!
로봇이 작동하는 모습 보기
그것이 무엇이며 어떻게 작동합니까?
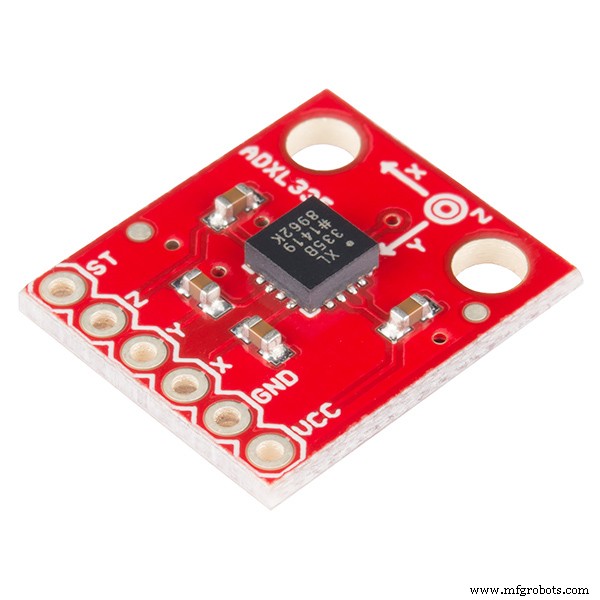
가속도계(ADXL335)란 무엇입니까?
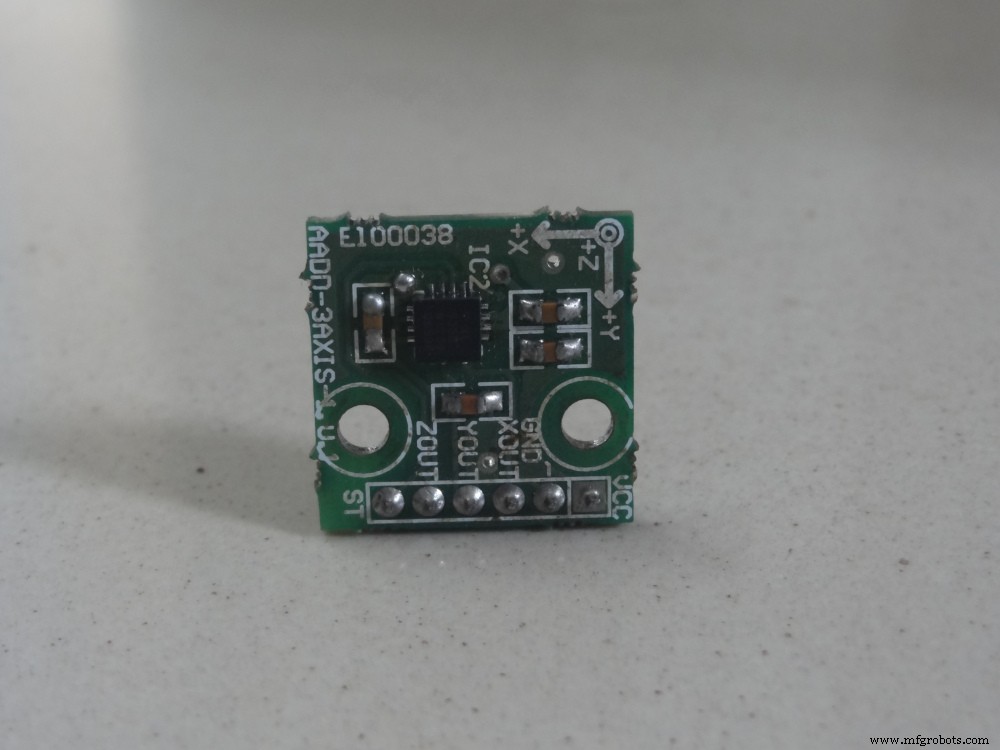
즉, 가속도계는 3축 가속도 측정 장치입니다. 여기에 사용된 가속도계는 ADXL335이며 3축(X Y Z)이 있습니다.
거의 모든 스마트폰에는 이제 가속도계가 있습니다(스마트폰에서 가져오지는 않겠지만). 휴대폰을 좌우로 기울이면 게임 속 캐릭터가 좌우로 움직이는 모션 게임(예:템플런)을 모바일에서 확실히 하셨군요. 가속도계에 의해 수행됩니다.
스마트폰에는 지금 필요하지 않은 자이로스코프라는 또 다른 센서가 있습니다.
어떻게 작동하고 제스처를 인식합니까?
여기서 로봇의 두뇌는 Arduino Uno(Atmega32)이며 일부 코드 세트가 제공됩니다. 손으로 만든 제스처/모션은 가속도계(ADXL335)라는 가속도 측정 장치에 의해 인식됩니다.
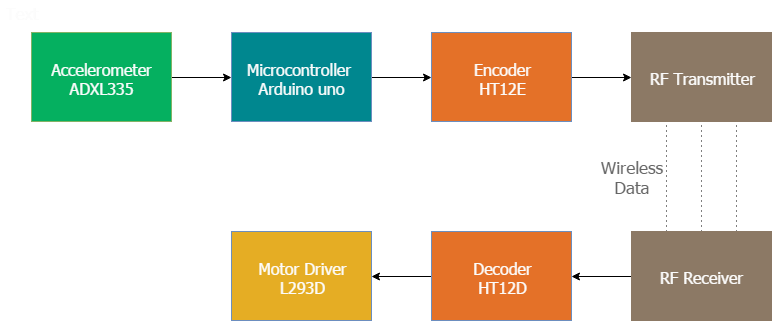
여기에서 가속도계는 우리가 손으로 몸짓을 할 때 X Y Z 좌표를 읽고 XY Z 좌표를 Arduino로 보냅니다(여기에서는 Z축이 필요하지 않으므로 좌표 X와 Y 두 개만 필요하므로 Z 좌표는 무시합니다). Arduino는 좌표 값을 확인하고 인코더 IC에 4비트 코드를 보냅니다. 인코더는 데이터를 송신기로 전달하고 전송된 데이터는 RF 수신기에서 수신합니다. 수신기는 4비트 코드를 디코더 IC로 보내고 디코더는 이를 모터 드라이버 IC로 전달합니다. 나중에 모터 드라이버는 두 개의 모터를 필요한 방향으로 돌리기로 결정합니다.
전원 공급 장치 만들기
먼저 전원 공급 장치 회로부터 시작하겠습니다. 두 개의 전원 공급 회로가 필요합니다. 하나는 송신기용이고 다른 하나는 수신기용입니다. 수신기 회로는 12V 전원을 사용하여 전원을 공급해야 하고(저는 12V 모터를 사용하고 있기 때문에) 송신기 회로는 a9V 배터리를 사용하여 전원을 공급할 수 있습니다.
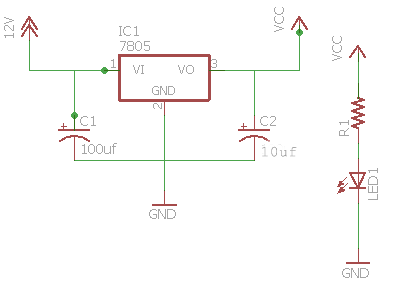
오른쪽에 수신기 전원 공급 장치의 회로가 표시됩니다. 이 다이어그램을 사용하여 공급 회로를 배선하십시오. 1k 저항을 통해 LED를 추가하여 전원 공급 상태를 표시할 수도 있습니다.
 <울>
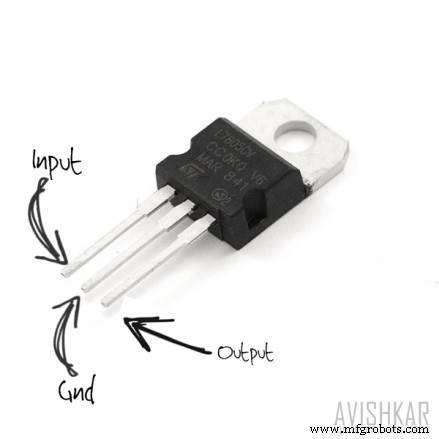
<울> 참고: 7805는 방열판을 사용합니다. 7V(12-5)를 떨어뜨리므로 레귤레이터를 태우기 위해 많은 열이 발생하므로 방열판 사용을 권장합니다.
송신기(원격) 만들기를 시작해 봅시다.
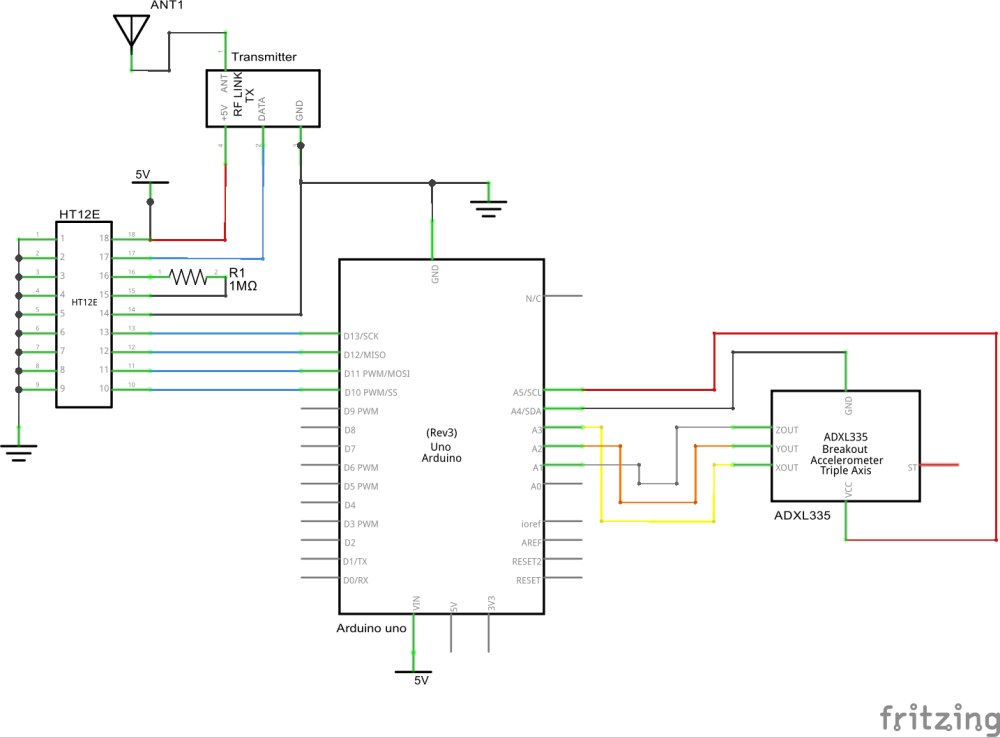
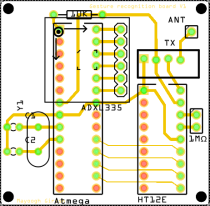
송신기 섹션은 손 제스처를 감지하고 데이터를 Arduino로 보내는 가속도계로 구성됩니다. 나중에 Arduino는 가속도계에서 수신한 데이터에 따라 인코더 IC에 데이터를 보내고 데이터는 수신기로 전송됩니다. 아래 회로에 따라 배선:
참고: 일부 가속도계는 3.3V 전원을 사용하며 5V에 의해 손상될 수 있습니다. 어느 것이 올바른 전압인지 알아보려면 공급업체의 문서를 확인하세요.
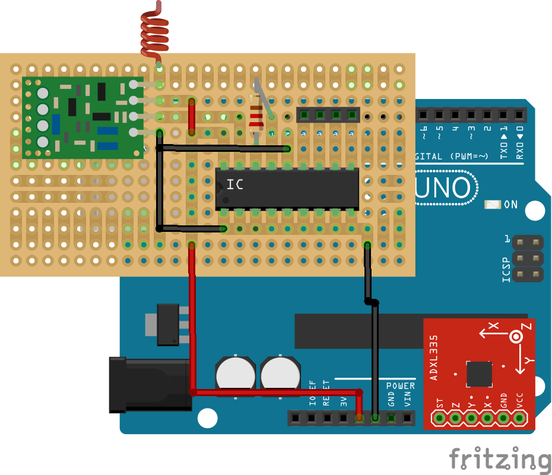
이것은 송신기의 예시일 뿐입니다.
Arduino에 코드 업로드
업데이트된 코드는 다음과 같습니다.
수신기 만들기
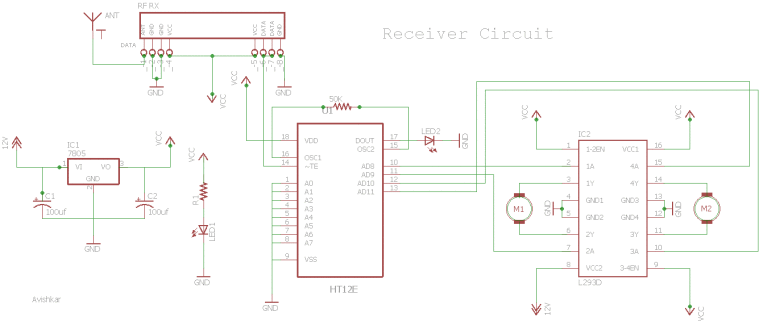
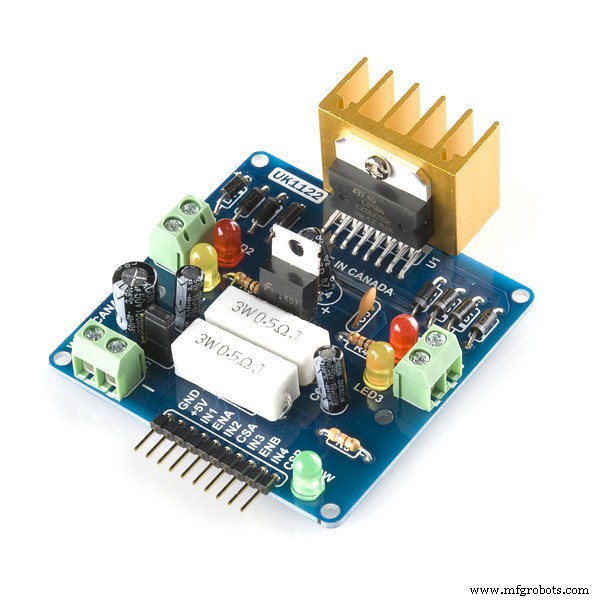
수신기 회로는 2개의 IC(HT12D 디코더, L293D 모터 드라이버), RF 수신기 모듈로 구성됩니다.
위의 수신기 회로도에 따라 회로를 배선합니다. 수신기 보드에는 2개의 LED가 있습니다. 하나는 수신기에 전원이 공급될 때 켜지고 다른 하나는 전원이 송신기 회로에 공급될 때 켜집니다. IC HT12D 근처의 LED가 켜져야 하며 연결 또는 RF-TX-RX 모듈에 문제가 있는 경우 송신기에 전원이 공급될 때 유효한 전송(VT)을 제공합니다.
리시버 섹션에 대해 더 자세히 알고 싶으시면 이 글을 읽어주세요.
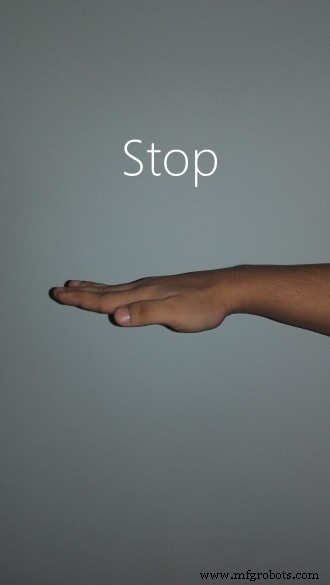
로봇은 어떤 제스처를 인식하나요?
이 로봇은 앞으로, 뒤로, 왼쪽, 오른쪽 및 정지의 5가지 제스처 세트를 인식하도록 설계되었습니다. 아래 주어진 제스처의 사진을 확인하면 더 나은 아이디어를 얻을 수 있습니다.
로봇 운전을 즐깁니다.
축소하고 영구적으로 만드십시오.
Arduino Uno는 손에 들고 다니기에 크고 부피가 큽니다. 그리고 Arduino를 사용하여 다른 프로젝트를 만들기로 결정했다면 Arduino와 관련된 모든 연결을 제거해야 하며 이전 작업을 잃게 됩니다. 저는 그렇게 하기 싫어서 영구적으로 만들 수 있는 솔루션을 찾았습니다. 이 기사를 확인하여 Arduino 프로젝트를 축소하는 방법을 배울 수 있습니다.
여기(미러)에서 독립 실행형 버전의 PCB 레이아웃을 다운로드하세요.
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdf코드를 Atmega8 MCU로 전송한 이 비디오를 시청하십시오. LED를 이용한 MCU의 출력만 보여드렸습니다.
내 새 프로젝트에 대한 내 블로그를 확인하십시오.
의심스러운 점이 있으면 여기에 댓글을 남겨주세요. 내 블로그야 여기가 아닌 그곳에서 정기적으로 피드백을 확인하겠습니다.
제조공정
구성품 및 소모품 Arduino UNO × 1 서보(타워 프로 MG996R) 후타바 서보 S3003 × 4 부저 × 1 초음파 센서 - HC-SR04(일반) × 1 8mm 미터법 Acme 리드 나사용 OpenBuilds 너트 블록 × 20 SparkFun 납땜 가능 브레드보드 - 미니 × 1 남성/여성 점퍼 와이어 × 16 브레드보드(일반) × 1 LED(일반)
로봇 툴링에 대해 이야기할 때 말 그대로 로봇의 손에 대해 이야기하는 것입니다. 로봇 툴링은 일반적으로 로봇의 손목에 부착되며 로봇의 프로그래밍된 작업을 수행하는 데 사용됩니다. 이러한 도구는 수행 중인 애플리케이션에 따라 용접, 재료 제거 또는 재료 취급에 사용할 수 있습니다. 용접을 위한 로봇 툴링은 드레스 패키지와 함께 로봇에 부착되는 용접 건의 형태로 제공됩니다. 이 유형의 로봇 툴링은 일반적으로 아크 용접 또는 스폿 용접에만 사용됩니다. 서로 교환할 수는 없지만 다른 프로세스에 로봇을 사용하기 위해 용접 건을 다른 툴링으