














 이 회로도는 Arduino Uno 보드와 다양한 센서 간의 연결 구성을 보여줍니다.
이 회로도는 Arduino Uno 보드와 다양한 센서 간의 연결 구성을 보여줍니다. 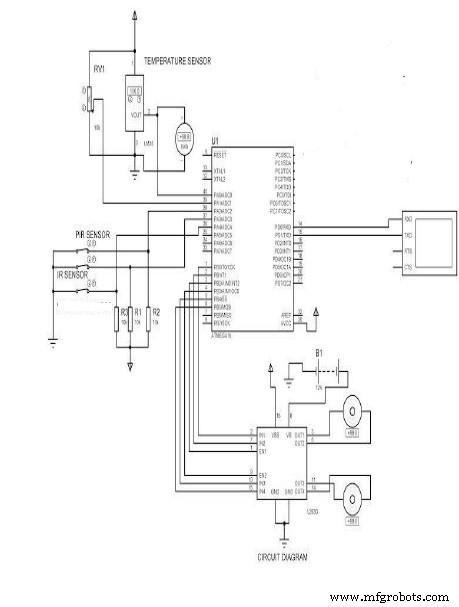 이 순서도는 시스템 작동 방식을 보여줍니다.
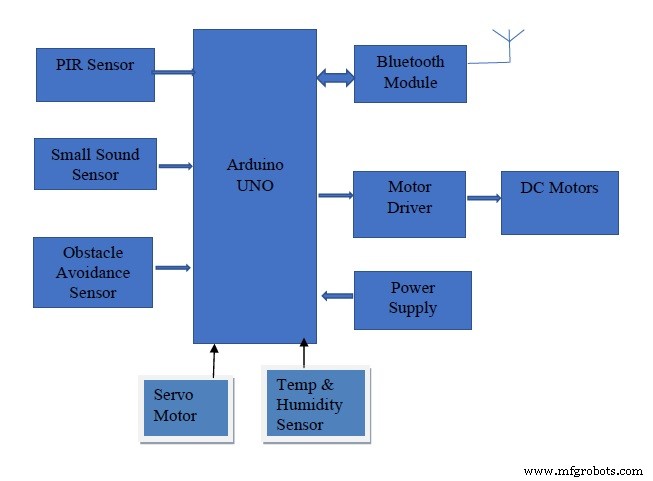
이 순서도는 시스템 작동 방식을 보여줍니다. 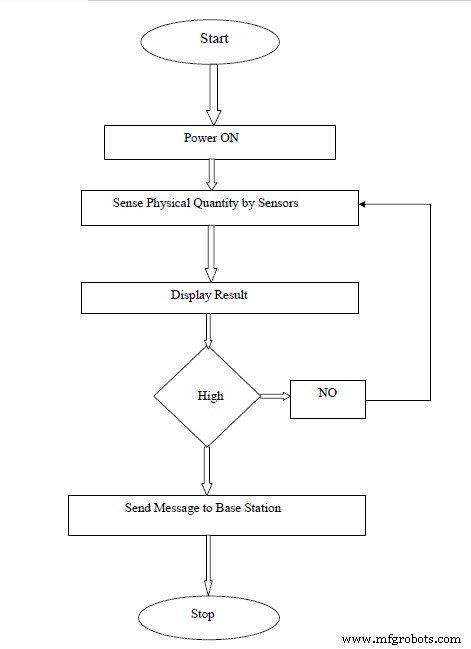
제조공정
- KINECT 및 RASPBERRY PI를 사용한 SONBI 로봇 인간 탐지
- Arduino UNO를 사용한 오징어 게임 인형 빌드
- Firebase를 사용하여 Arduino 간에 센서 데이터 보내기
- Python과 함께 Arduino 및 RFID를 사용한 출석 시스템
- Arduino를 사용한 DIY 적외선 심장 박동 센서
- Raspberry Motor Shield를 사용한 Android 제어 장난감
- IOT - ESP8266, Arduino 및 초음파 센서를 사용하는 스마트 항아리
- Arduino Uno WiFi를 사용하는 WebServerBlink
- 산불 모니터링 및 감지 시스템(SMS 경보 포함)
- Arduino와 함께 MAX30100 웨어러블 펄스 센서 사용