

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 |
 |
| |||
|
업데이트(2019년 10월 21일):코드에 대한 주요 업데이트입니다. 아래도 읽어보세요. 조금 바뀌었습니다.
내 862D+ 납땜 인두가 부러져서 새 인두를 사는 대신 두 번째 인두를 가져와 수리했습니다. 가장 어려운 점은 온라인에는 다른 곳에서 솔루션이 없다는 것입니다. 철을 교체한 후에도 여전히 S-E 또는 센서 오류라고 표시되어 PCB가 파손되었습니다.

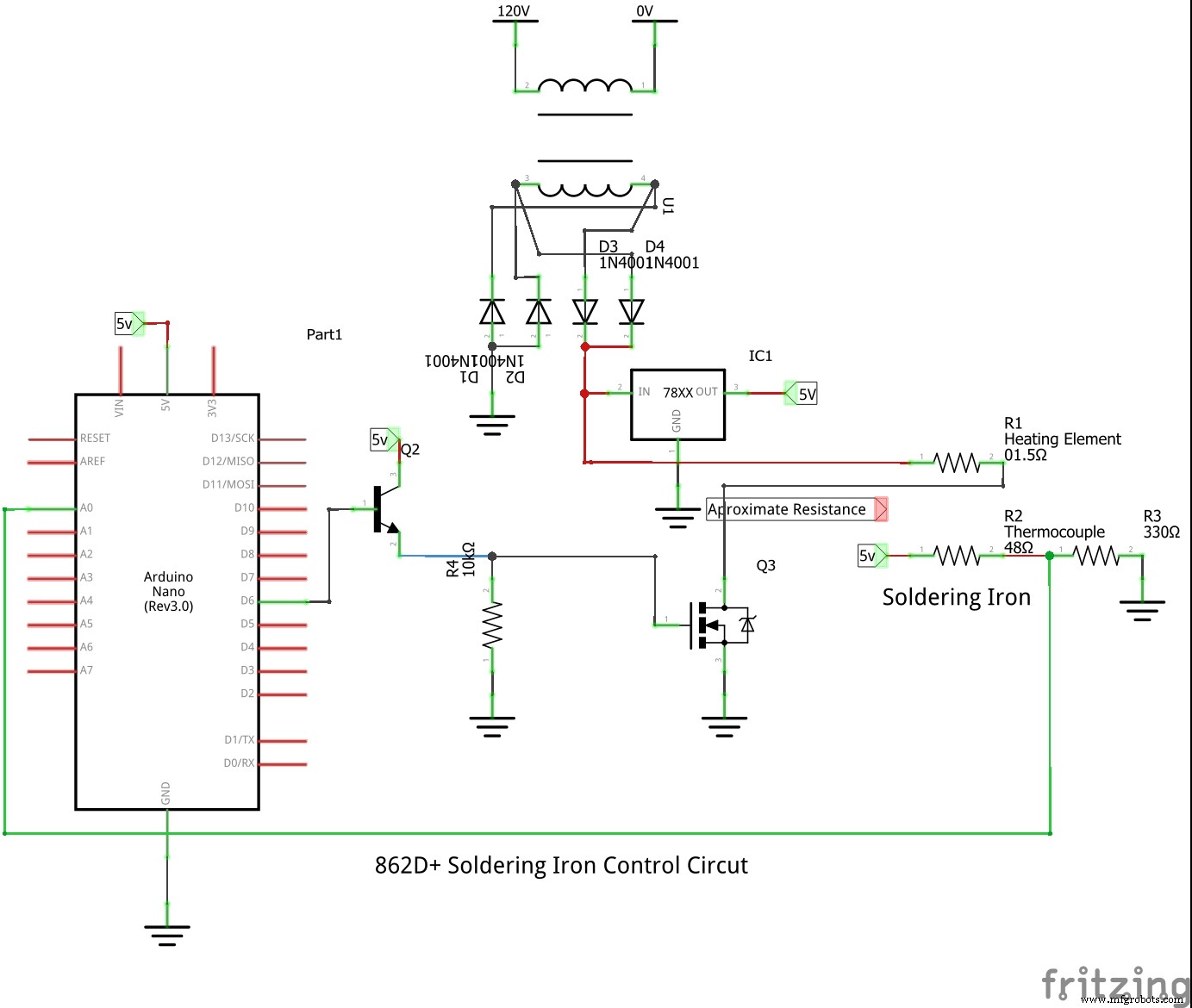
그래서 나는 내 자신의 컨트롤러 회로를 만들고 내부에 채우기로 결정했습니다. 두 번째 변압기가 필요했지만 값이 싸서 내부에 충분한 공간이 있었습니다.
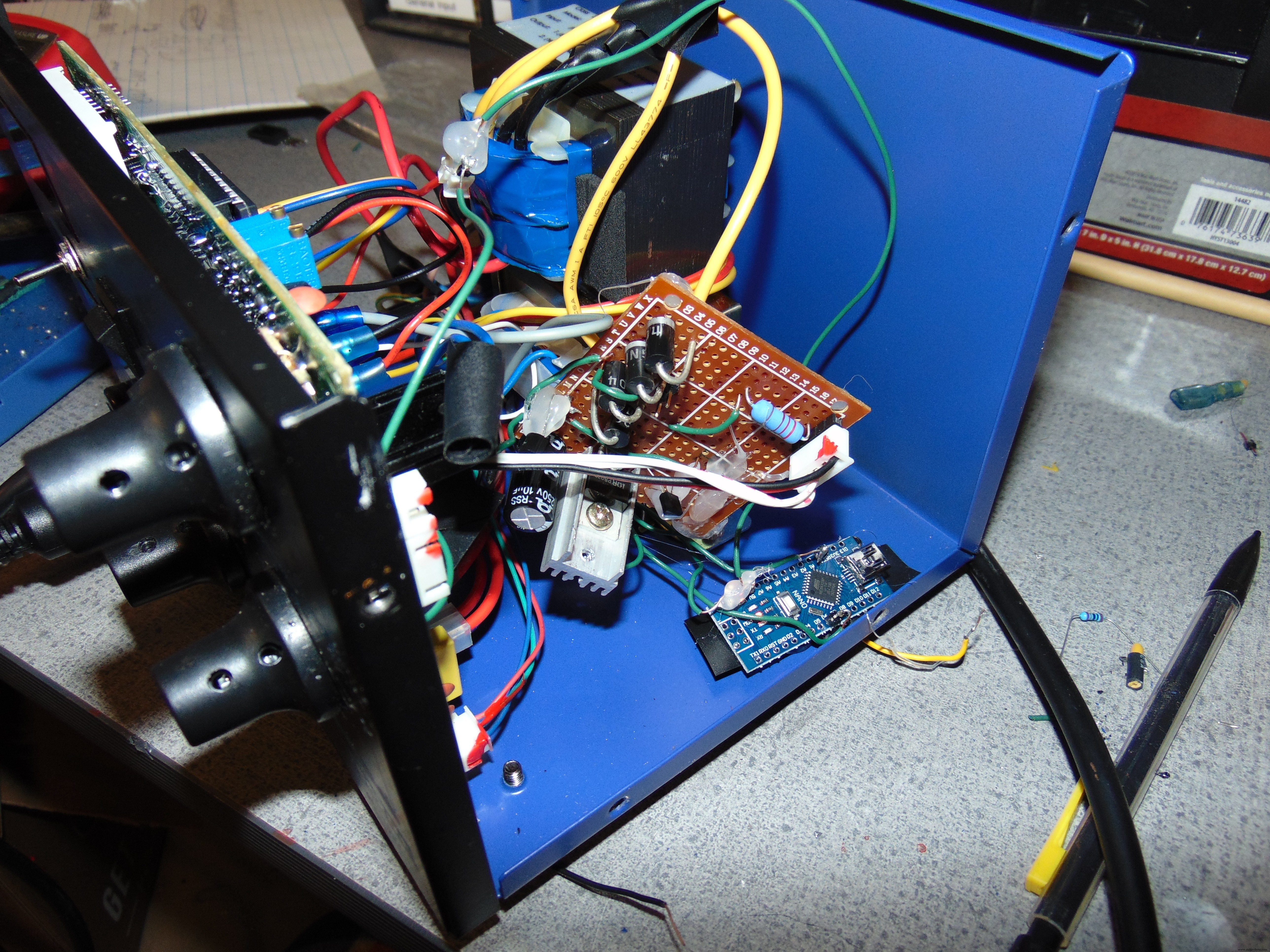
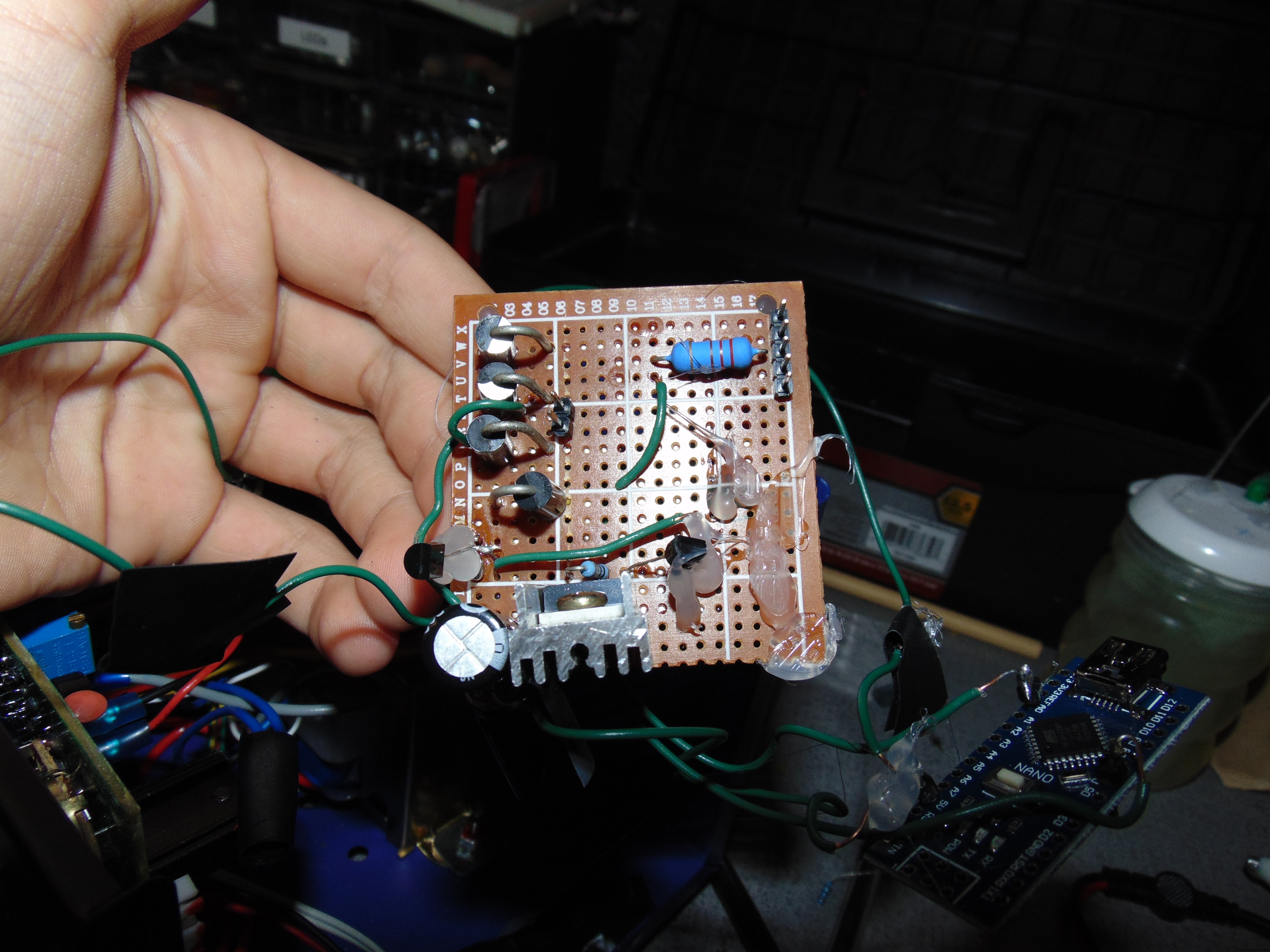
보기에는 좋지 않을 수 있지만 매력처럼 작동합니다. 보너스로 인두 전원 버튼을 제거하고 5v와 arduino 사이에 추가했습니다.
빌드 팁:
모든 부품을 지금 구입할 수 있습니다. LCSC는 벌크 전자 사이트입니다. 미국은 배송비가 비싸지만 구성품은 터무니 없이 저렴합니다.
Amazon의 EX MOSFET은 6달러이지만 LCSC의 MOSFET은 32센트입니다. 그러나 저항과 같은 것은 대량으로 구매해야 합니다. 그래도 저항 50개는 말 그대로 0.84센트입니다.
접지된 알루미늄 호일 또는 다른 것으로 긴 데이터 와이어를 보호해야 합니다. 예를 들어 12c 스크린 와이어.
코드에서:
1023 가장 차가운 0 용암. 설정 온도를 원하는 대로 변경하십시오. 일반적으로 약 600개 정도입니다.
납땜 인두 컨트롤러는 인두가 연결되었는지 또는 파손되었는지 감지할 수 있습니다. 납땜 인두가 분리되면 arduino는 아날로그 입력을 0으로 만듭니다. 납땜 인두가 제대로 가열되는 데 사용되었지만 지금은 가열되지 않는 경우:인두를 분리하고 인두를 꽂으라는 메시지가 표시될 때까지 기다리면 계속 진행됩니다. (이것은 저에게 문제였습니다)
이제 다리미의 기본 사항을 알았습니다. 이것은 고품질 납땜 인두를 구입하는 것보다 저렴한 대안이 될 수 있습니다. 더 높은 품질의 다리미가 있지만 이것은 매우 저렴하고 DIY입니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">int output =0;int temp =0;int settemp =630;String inputString =""; // 들어오는 데이터를 담을 문자열boolean rap =false;boolean stringComplete =false; // 문자열이 완전한지 여부int t =0;void setup() { Serial.begin(9600); inputString.reserve(200); 핀모드(6, 출력); digitalWrite(6, LOW);} 무효 루프() { 직렬 이벤트(); if (stringComplete) { Serial.println(inputString); t =inputString.toInt(); //settemp =t //설정 온도를 직렬 입력으로 설정합니다. inputString =""; 문자열 완성 =거짓; } 빠른(); pid();}void Rapid() { //처음에 빠르게 가열하여 납땜 인두를 제어합니다. if (랩 ==false) { digitalWrite(6, HIGH); do { 임시 =analogRead(0); Serial.print("빠른"); Serial.println(임시); } 동안 (temp - settemp>
10); 디지털 쓰기(6, 낮음); 랩 =사실; }}void pid() { //저속 유효 전력 가열로 납땜을 제어합니다. 온도 =analogRead(0); 출력 =온도 - 설정 온도; if (출력 <0) { 출력 =0; } if (출력> 255) { 출력 =255; } Serial.print("피드"); Serial.print(임시); Serial.print(", "); Serial.println(출력); analogWrite(6, output);}void serialEvent() { //settemp 업데이트에 사용할 수 있는 직렬 통신 while (Serial.available()) { char inChar =(char)Serial.read(); 입력 문자열 +=inChar; if (inChar =='\n') { stringComplete =true; } }} #include#include #include #define OLED_ADDR 0x3CAdafruit_SSD1306 display(-1);int settemp =590; //수동 설정 변수int output =0;int temp =0;String inputString ="";boolean rap =false;boolean stringComplete =false;int t =0;int mappingpower =0;byte powermultiply =0;long counter =0; int temp2 =0, 바이트 outputoffset =0, 바이트 scaleread =0, 무효 setup() { Serial.begin(9600); 핀모드(12, 출력); 디지털 쓰기(12, 낮음); display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR); display.clearDisplay(); 디스플레이.디스플레이(); Rapid();} 무효 루프() { pid(); display.clearDisplay(); 업데이트바(); 업데이트 텍스트(); display.display();}void Rapid() { //처음에 빠르게 가열하여 납땜 인두를 제어합니다. if (랩 ==false) { digitalWrite(12, HIGH); 출력 =255; do { 임시 =analogRead(0); Serial.print("빠른"); Serial.println(임시); display.clearDisplay(); 업데이트바(); 업데이트 텍스트(); 디스플레이.디스플레이(); } 동안 (temp - settemp> 1); 디지털 쓰기(12, 낮음); 랩 =사실; }}void pid() { //저속 유효 전력 가열로 납땜을 제어합니다. 온도 =analogRead(0); //온도 평균기 temp2 =temp; 지연(50); 온도 =analogRead(0); 온도 =온도 + temp2; 온도 =온도 / 2; 제로 스케일; // 납땜 인두 검사기를 활성화하지 않음 temp =temp + outputoffset; 출력 =온도 - 설정 온도; 출력 =출력 + 전력 곱하기; 출력 =출력 * 4; if (출력 <0) { 출력 =0; } if (출력> 255) { 출력 =255; } 카운터 =카운터 + 1; if (카운터> 10) { 카운터 =0; if (temp> settemp + 3) { powermultiply =powermultiply + 1; } if (temp 0) { powermultiply =powermultiply - 1; } } Serial.print(전력곱하기); Serial.print(", "); Serial.print(임시); Serial.print(", "); Serial.println(출력); analogWrite(12, output);}void updatebar() { //OLED 디스플레이의 Powerbar 업데이트 mappingpower =map(output, 0, 255, 0, 127) - 10; display.fillRect(0, 0, 매핑된 전원, 8, 흰색); display.fillRoundRect(mappedpower - 5, 0, 20, 8, 3, WHITE);}void updatetext() {//Oled 디스플레이의 텍스트 업데이트 display.setCursor(0, 9); display.setTextColor(흰색); display.setTextSize(1); display.print("온도 설정:"); display.print(settemp); display.setCursor(0, 20); display.print("온도:"); display.print(temp);}void zeroscale() { //납땜 인두가 뽑혀 있으면 입력 핀 값을 조정하여 0으로 만듭니다. if (output <200) { display.clearDisplay(); display.setCursor(0, 9); display.setTextColor(흰색); display.setTextSize(1); display.print("납땜 인두가 없거나 결함이 있습니다."); display.setCursor(0, 15); display.print("철."); display.setCursor(0, 20); display.print("5초 후에 테스트합니다."); 디스플레이.디스플레이(); 지연(5000); if (출력 <200) { outputoffset =온도; } 디스플레이.clearDisplay(); display.setCursor(0, 9); display.setTextColor(흰색); display.setTextSize(1); display.print("출력 오프셋 세트입니다."); display.setCursor(0, 20); display.print("다리미를 꽂아주세요."); 디스플레이.디스플레이(); do { scaleread =analogRead(0); } 동안 (스케일 읽기 <200); }}
#include#include #include #define OLED_ADDR 0x3CAdafruit_SSD1306 display(-1);int settemp =590; //수동 설정 변수int output =0;int temp =0;String inputString ="";boolean rap =false;boolean stringComplete =false;int t =0;int mappingpower =0;byte powermultiply =0;long counter =0; int temp2 =0, 바이트 outputoffset =0, 바이트 scaleread =0, 무효 setup() { Serial.begin(9600); 핀모드(12, 출력); 디지털 쓰기(12, 낮음); display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR); display.clearDisplay(); 디스플레이.디스플레이(); Rapid();} 무효 루프() { pid(); display.clearDisplay(); 업데이트바(); 업데이트 텍스트(); display.display();}void Rapid() { //처음에 빠르게 가열하여 납땜 인두를 제어합니다. if (랩 ==false) { digitalWrite(12, HIGH); 출력 =255; do { 임시 =analogRead(0); Serial.print("빠른"); Serial.println(임시); display.clearDisplay(); 업데이트바(); 업데이트 텍스트(); 디스플레이.디스플레이(); } 동안 (temp - settemp> 1); 디지털 쓰기(12, 낮음); 랩 =사실; }}void pid() { //저속 유효 전력 가열로 납땜을 제어합니다. 온도 =analogRead(0); //온도 평균기 temp2 =temp; 지연(50); 온도 =analogRead(0); 온도 =온도 + temp2; 온도 =온도 / 2; 제로 스케일(); // 납땜 인두 검사기를 활성화하지 않음 temp =temp + outputoffset; 출력 =온도 - 설정 온도; 출력 =출력 + 전력 곱하기; 출력 =출력 * 4; if (출력 <0) { 출력 =0; } if (출력> 255) { 출력 =255; } 카운터 =카운터 + 1; if (카운터> 10) { 카운터 =0; if (temp> settemp + 3) { powermultiply =powermultiply + 1; } if (temp 0) { powermultiply =powermultiply - 1; } } Serial.print(전력곱하기); Serial.print(", "); Serial.print(임시); Serial.print(", "); Serial.println(출력); analogWrite(12, output);}void updatebar() { //OLED 디스플레이의 Powerbar 업데이트 mappingpower =map(output, 0, 255, 0, 127) - 10; display.fillRect(0, 0, 매핑된 전원, 8, 흰색); display.fillRoundRect(mappedpower - 5, 0, 20, 8, 3, WHITE);}void updatetext() {//Oled 디스플레이의 텍스트 업데이트 display.setCursor(0, 9); display.setTextColor(흰색); display.setTextSize(1); display.print("온도 설정:"); display.print(settemp); display.setCursor(0, 20); display.print("온도:"); display.print(temp);}void zeroscale() { //납땜 인두의 플러그가 뽑혀 있으면 입력 핀 값을 조정하여 0으로 만듭니다. if (temp <200) { display.clearDisplay(); display.setCursor(0, 20); display.setTextColor(흰색); display.setTextSize(1); display.print("납땜이 없습니다."); 디스플레이.디스플레이(); 지연(10000); display.setCursor(0, 0); display.print("5초 후에 테스트합니다."); 디스플레이.디스플레이(); 지연(5000); if (temp <200) { outputoffset =temp; } 디스플레이.clearDisplay(); display.setCursor(0, 20); display.setTextColor(흰색); display.setTextSize(1); display.print("출력 오프셋 세트입니다."); display.setCursor(0, 0); display.print("다리미를 연결하세요."); 디스플레이.디스플레이(); do { scaleread =analogRead(0); } 동안 (스케일 읽기 <200); }}
제조공정
제철을 위한 Matmor 공정 Matmor 공정은 현재 Environmental Clean Technologies Ltd(ECT)에서 개발 중인 제철 공정입니다. Matmor 공정 기술은 특허 기술입니다. 이 기술은 갈탄을 기반으로 하며 독특한 화학 및 용광로 설계로 인해 고급 철광석을 저렴한 대체 원료로 대체할 수 있습니다. 일반적으로 갈탄(갈탄이라고도 함)은 휘발성 물질과 수분 함량이 높기 때문에 야금 용도로 사용되지 않습니다. Environmental Clean Technologies Ltd는 공장, 장비 및 지적 재산(
납땜 인두는 회로를 구축할 때 필수품입니다. 부품을 보드에 결합하여 연결을 형성할 수 있기 때문입니다. 각 응용 분야에 특정 온도가 필요한 다른 용도로도 사용할 수 있습니다. 이러한 전기 도구에는 결합에 도움이 되는 고유한 첨가제 혼합물이 포함되어 있습니다. 또한 오늘날 시장에는 세 가지 다른 납땜 인두 유형이 있습니다. WellPCB는 귀하를 올바른 길로 인도하는 것을 목표로 합니다. 이 기사를 읽고 나면 납땜 인두의 기능을 더 잘 이해할 수 있을 것입니다. 그럼 시작하겠습니다! DIY 납땜 인두– 납땜이란 무엇입니까? (