

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
레이저 트립와이어 구축
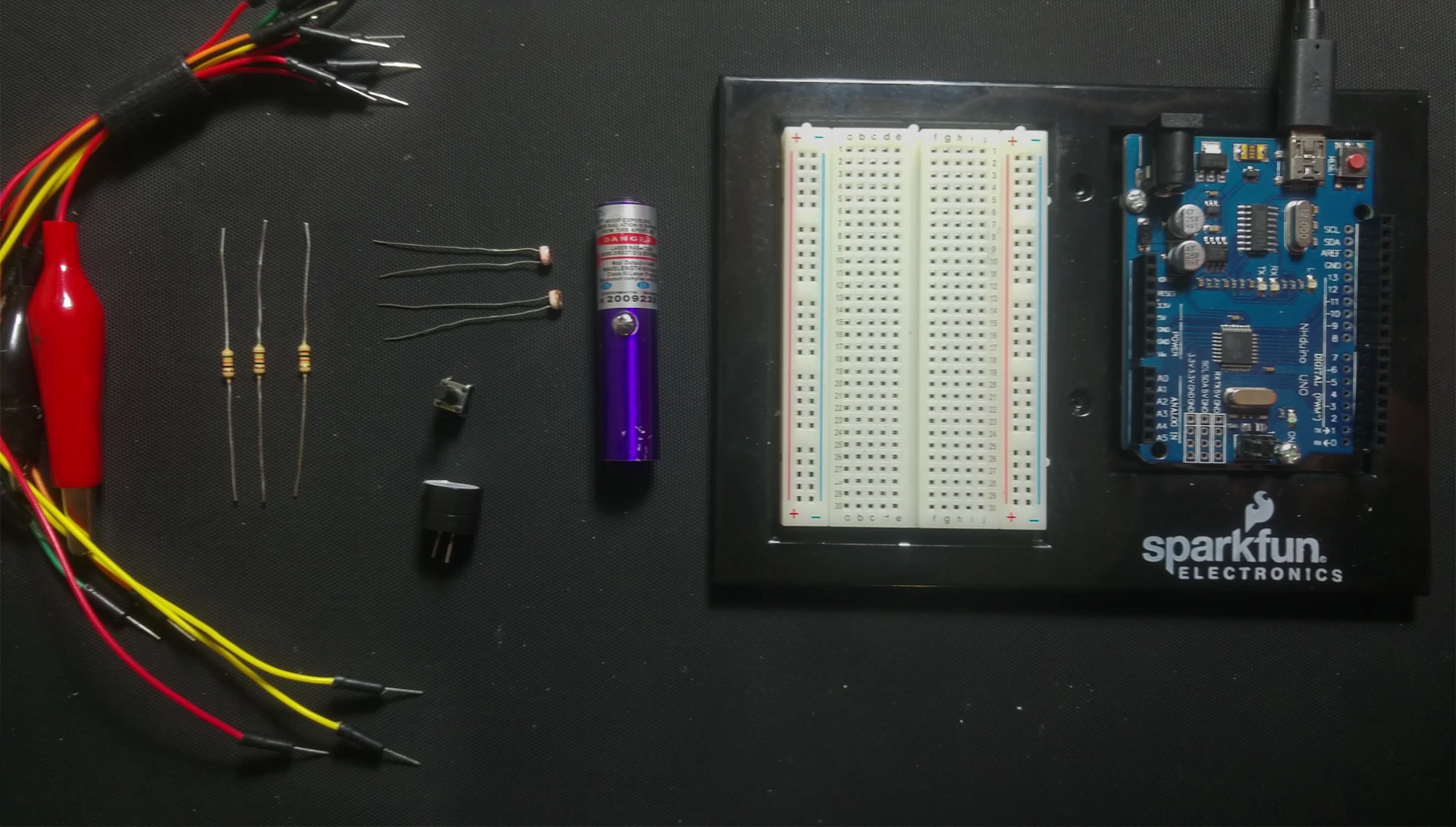
구성 요소
다음이 필요합니다.
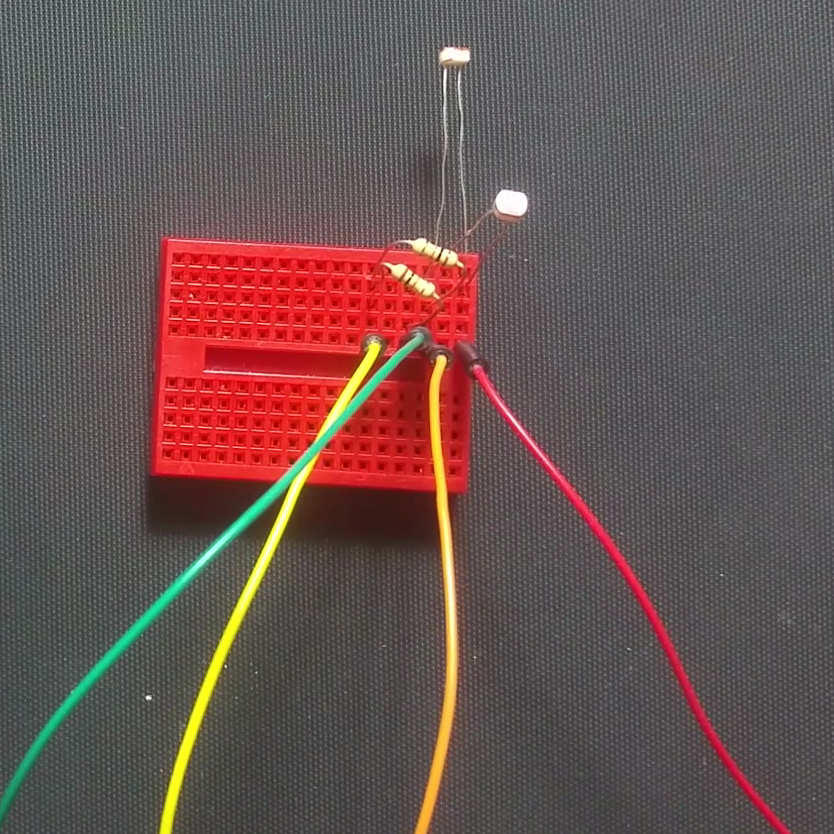
<울>또한 레이저 감지 회로에 별도의 브레드보드를 사용했습니다. (이것은 힙이 포토 레지스터에 레이저를 배치하는 데 도움이 되었습니다.)
레이저 감지기 만들기
회로의 레이저 감지 섹션부터 시작하겠습니다.
먼저 두 개의 점퍼 와이어를 잡으십시오. 빨간색과 노란색이 있습니다. 2개의 점퍼 와이어를 2개의 개별 터미널 스트립에 배치합니다. 포토 레지스터를 잡고 빨간색 리드와 터미널 스트립에 연결합니다. 다른 단자 스트립과 빨간색 리드 사이에 다른 포토 레지스터를 놓습니다. 노란색 리드의 10k 저항을 포토 레지스터 중 하나에 연결하고 다른 10K 저항을 다른 포토 레지스터와 노란색 리드 사이에 연결합니다. 두 개의 리드를 더 잡고 포토 저항과 10k 저항의 각 교차점에 연결합니다. 녹색과 주황색 점퍼선을 사용했습니다.
노란색 리드를 브레드 보드의 음극에 연결하고 빨간색 리드를 브레드 보드의 양극에 연결합니다. 주황색을 A0에 연결하고(여기에 연결된 광 저항기가 레이저 감지기가 됨) 녹색을 A1에 연결합니다(여기에 연결된 광 저항기가 주변 광 감지기가 됨).
다음 부저를 실행합시다
브레드보드의 아무 곳에나 버저를 놓습니다. 음극 레일과 부저 음극 사이에 리드를 연결합니다. 버저의 양극단을 Arduino의 3번 핀에 연결합니다.

버튼 만들기
다음으로 버튼 섹션을 만들 것입니다.
2개의 단자 스트립 사이에 버튼을 놓습니다(2개의 스트립 사이에서 버튼을 눌렀을 때만 접촉이 있는지 확인하십시오). 마지막 10k 저항을 버튼의 한쪽 끝과 음극 핀에 놓습니다. 나는 그것을 접지 레일에 연결하기 위해 점퍼 와이어를 사용했습니다. 버튼의 다른 쪽 끝을 양극 레일에 연결합니다. 그런 다음 버튼과 저항의 교차점을 Arduino의 4번 핀에 연결합니다.
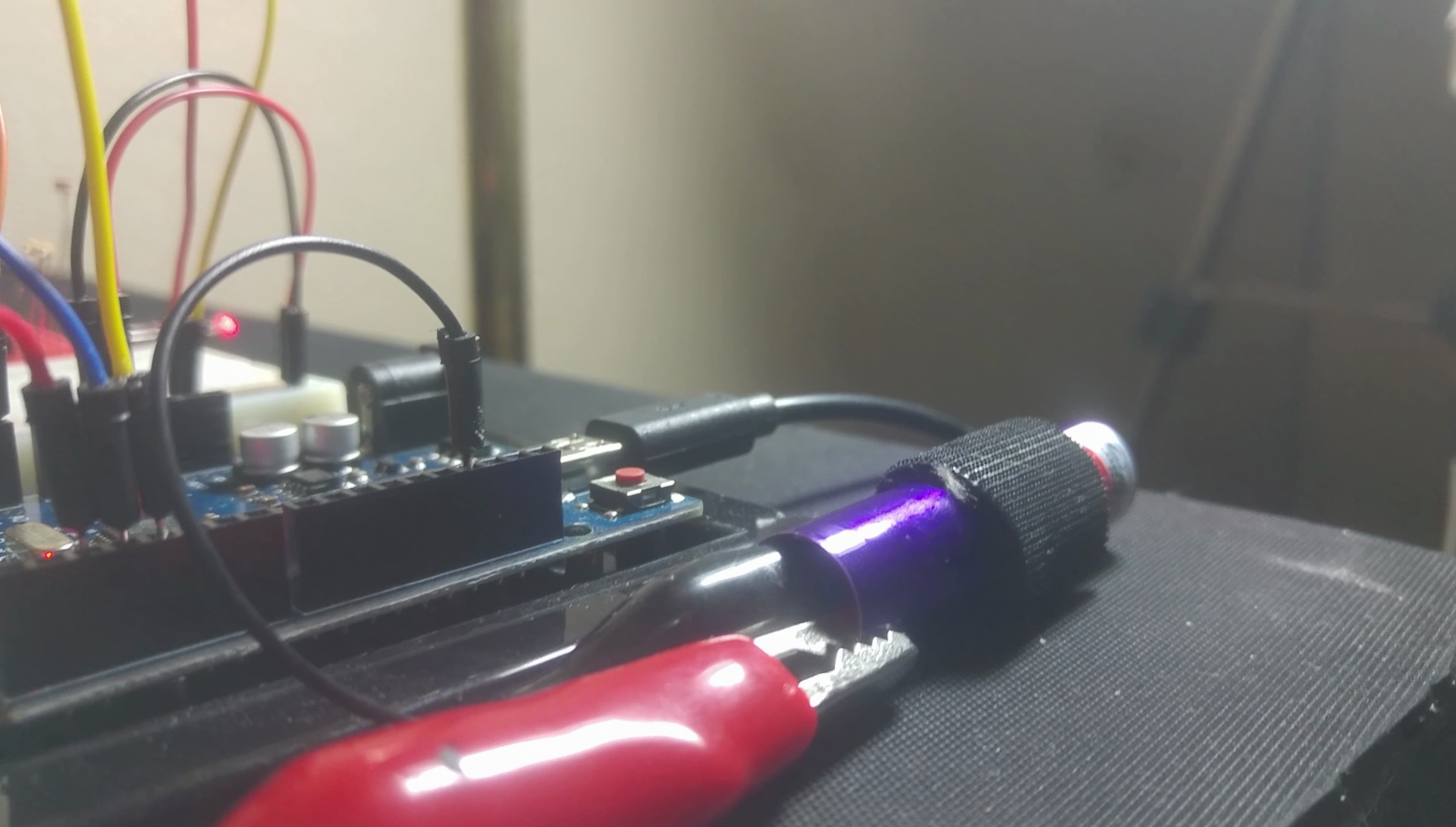
레이저 빛을 위한 시간입니다!
마지막으로 레이저를 핀 2와 접지에 연결해 보겠습니다. 나는 이 두 가지 모두에 Arduino의 핀을 사용했습니다. 저는 악어 클립을 스프링과 케이스에 연결하고 벨크로로 버튼을 누르고 있는 "해킹"한 값싼 레이저를 사용했습니다.
레이저 트립 와이어를 실행하는 프로그램을 작성했습니다.
버튼이 눌렸는지 여부를 지속적으로 확인합니다. 이 버튼을 누르면 설정 모드로 들어가고, 다시 누르면 무장 모드로 들어갑니다.
설정 모드에 있으면 다음을 수행합니다.
<울>무장 모드에서는 다음을 수행합니다.
<울>트립 모드에서 트립 와이어가 "트립"되었습니다:
<울>// 5핀 트립 와이어// Variablesint 모드 =1;int ambiant;int 트립 =1000; // laserint minLight =900;int makeBeep =1; // 비프음이 없으면 0, beep!int atAverage;long millisCount;// 출력 Pinsint laserPin =2;int ledPin =13;int buzzerPin =3;String modeNames[3] ={"SETTINGS","ARMED", "TRIP"};// Pinsint 입력 modePin =4; int tripPin =A0, int ambiantPin =A1, 무효 설정() { pinMode(ledPin, OUTPUT); 핀모드(레이저핀, 출력); 핀모드(부저핀, 출력); 핀모드(모드핀, 입력); Serial.begin(9600);}void loop() { // 버튼을 눌렀을 때 if (digitalRead(modePin) ==1) { trip =analogRead(tripPin); 모드=모드 + 1; if (모드>=2) { 모드 =0; } 신호음(1); 지연(300); } //모드가 변경될 때 무언가를 합니다. switch (mode) { case 0://보정 모드 digitalWrite(laserPin,HIGH); 주변 =analogRead(ambiantPin); 여행 =analogRead(tripPin); 평균 =주변 + ((여행 - 주변)/2); 통계(); if (trip>
=minLight) { digitalWrite(ledPin,HIGH); } else { digitalWrite(ledPin,LOW); } 부서지다; 경우 1:// 무장 모드 digitalWrite(laserPin,HIGH); 디지털 쓰기(LED핀,낮음); 주변 =analogRead(ambiantPin); 평균 =주변 + ((여행 - 주변)/2); if (analogRead(tripPin) =3000) { millisCount =millis(); 통계(); } 부서지다; 사례 2://여행 모드 if ((millis() - millisCount)>=1000) { millisCount =millis(); 통계(); 경고음(3); 모드 =1; } 부서지다; } 지연(1); // 비트 기다림}//It Beepsvoid beep(int qty) { int count; if (makeBeep ==1) { for (count =1;count<=qty;count++) { digitalWrite(buzzerPin, HIGH); 지연(50); digitalWrite(부저핀, 낮음); 지연(50); } }}//직렬 Portvoid stats() { Serial.print("A:"); Serial.print(주변); Serial.print(" T:"); Serial.print(여행); Serial.print(" AT:"); Serial.print(평균); Serial.print("모드:"); Serial.print(모드이름[모드]); Serial.println("");} 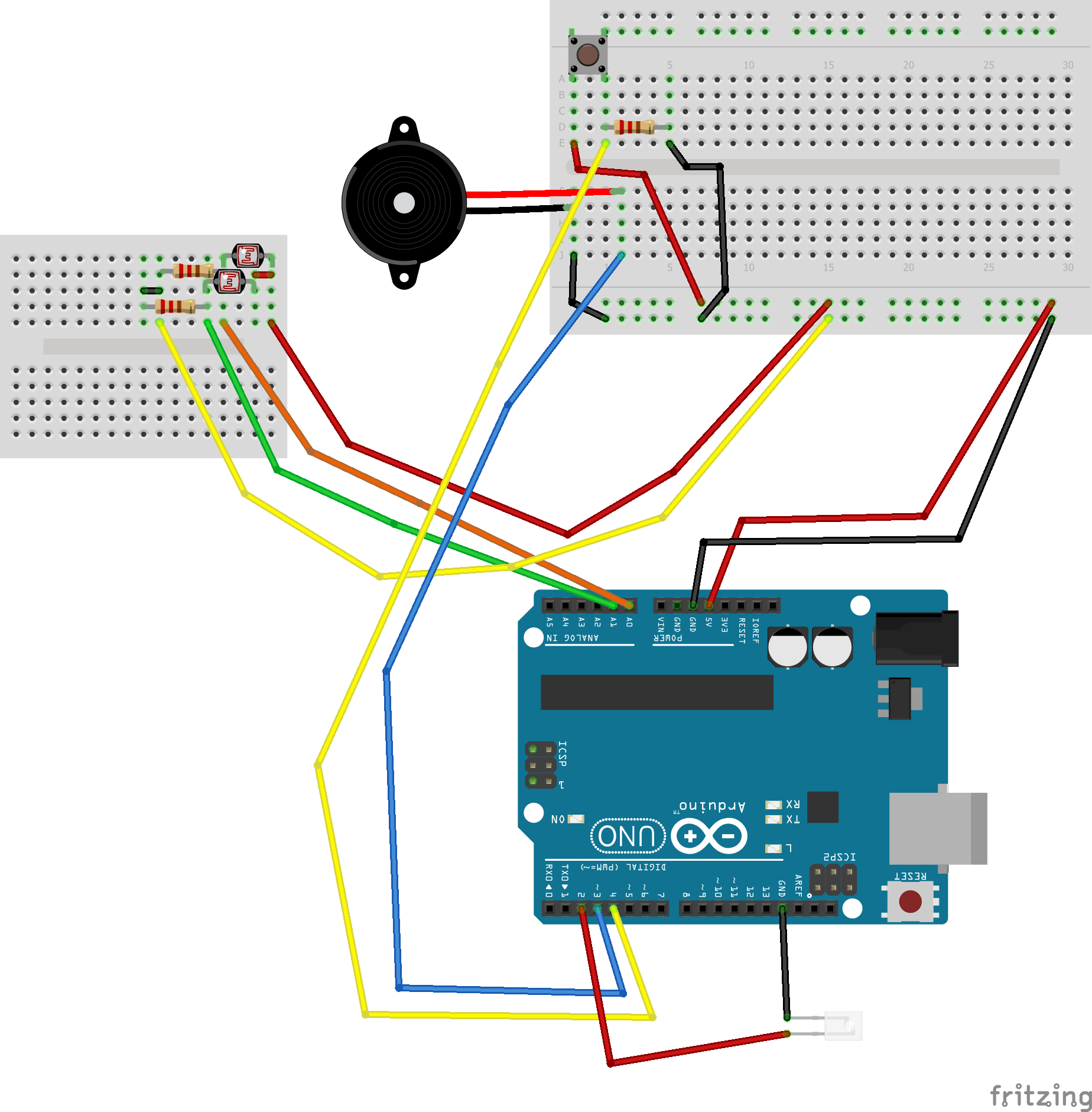 개략도
개략도 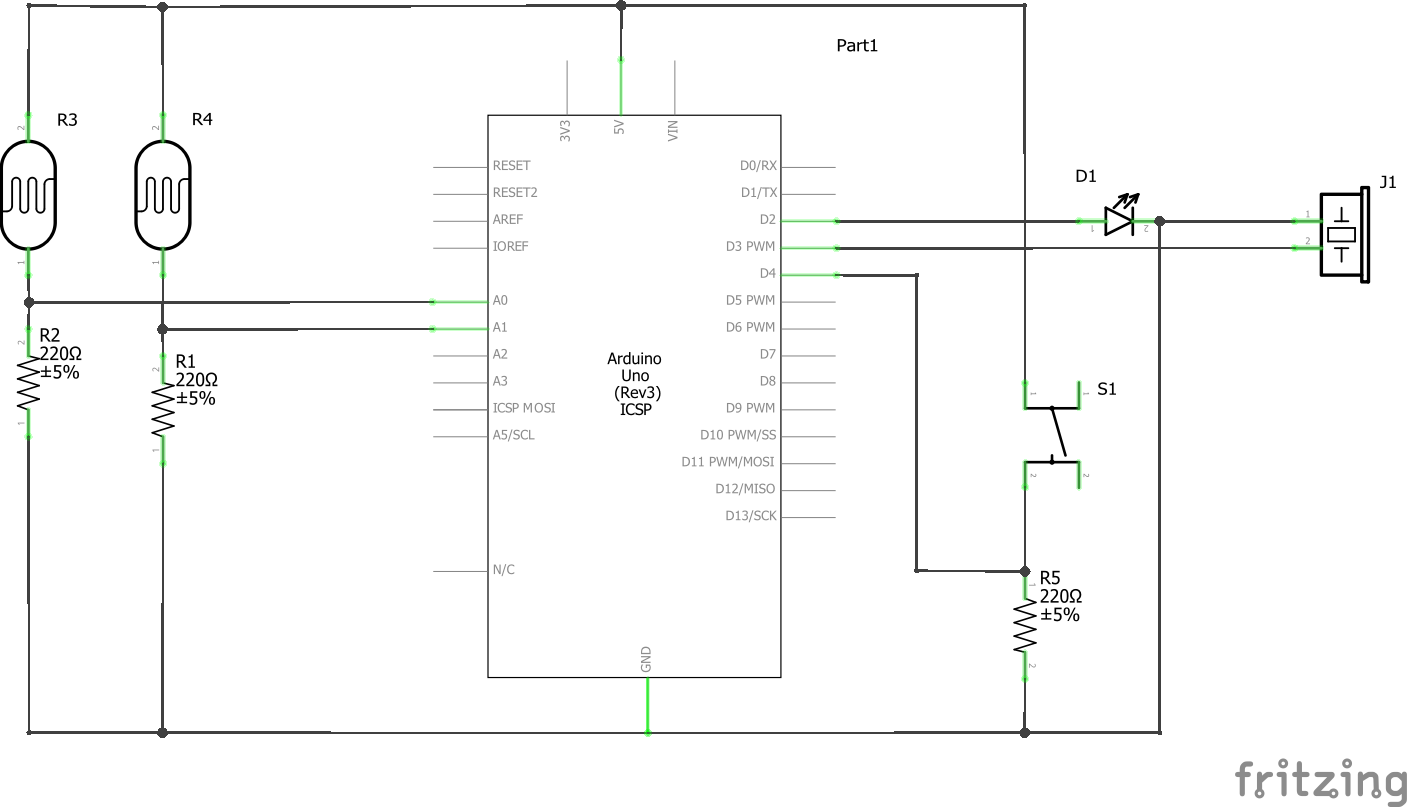
제조공정
구성품 및 소모품 Arduino Nano R3 × 1 Elecrow OLED 0.96 128x64 × 1 X-40 레이저 줄자 × 1 LM2596 DC-DC 모듈 × 1 필요한 도구 및 기계 납땜 인두(일반) ST-LINK 프로그래머 앱 및 온라인 서비스 STMicroelectronics ST-LINK 유틸리티 이 프로젝트 정보 Arduino 프로젝트를 위한 빠르고
이 튜토리얼에서는 이전 비디오 중 하나에서 제작한 DIY 3D Printed SCARA 로봇 팔을 레이저 조각기로 변환하는 방법을 보여 드리겠습니다. 동영상 다음 동영상을 보거나 아래 기사를 읽을 수 있습니다. 프로젝트 개요 SCARA 로봇은 4개의 NEMA 17 스테퍼 모터로 구동되고 Arduino 보드를 사용하여 제어되는 4개의 자유도를 가지고 있습니다. 원본 비디오에서는 Arduino UNO 보드를 CNC Shield와 조합하여 사용했지만 이제는 Arduino MEGA 보드와 RAMP 보드를 함께 사용합니다. 로봇을 제어하