

제조공정

산업 제조
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
 |
|
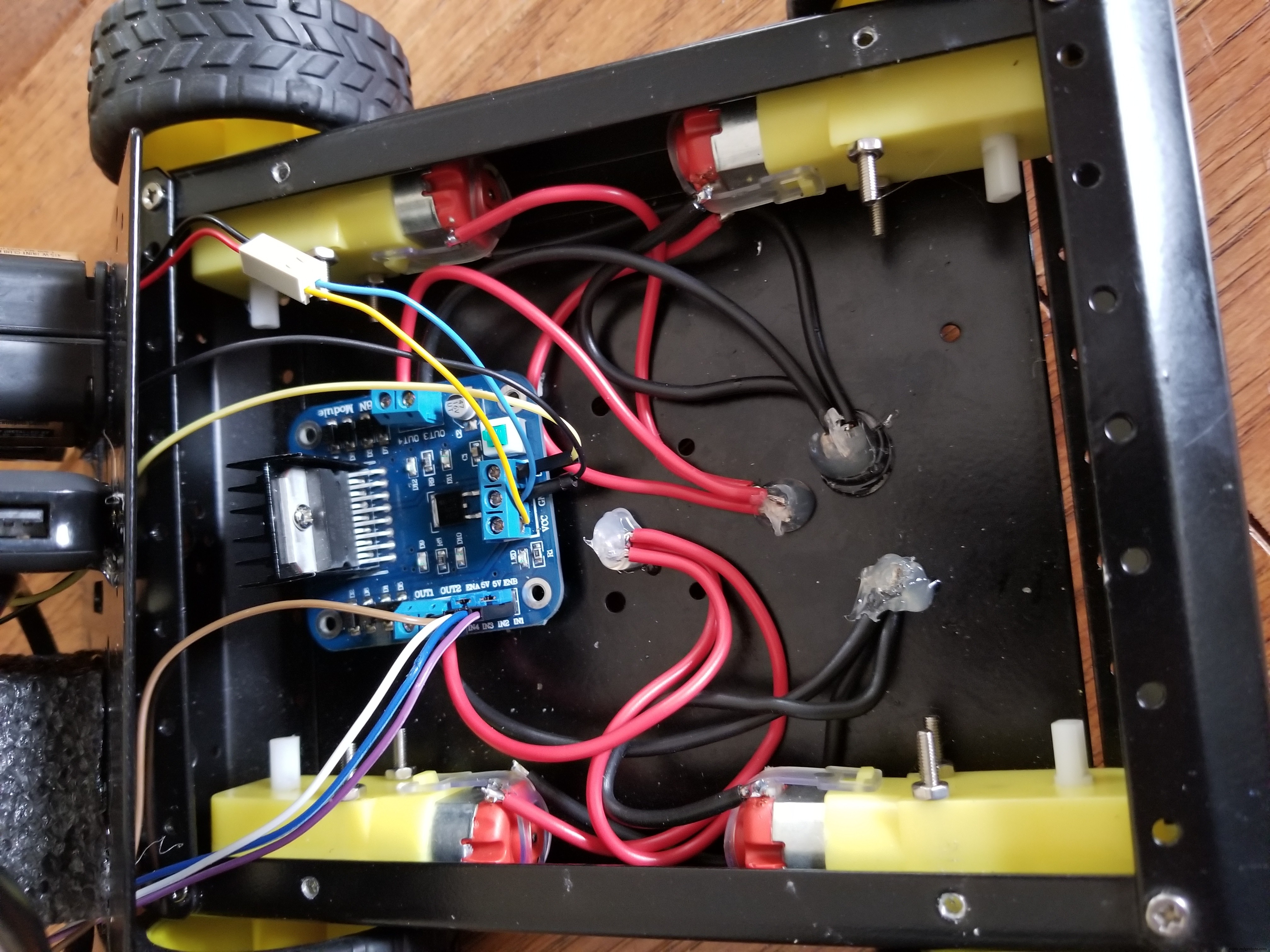
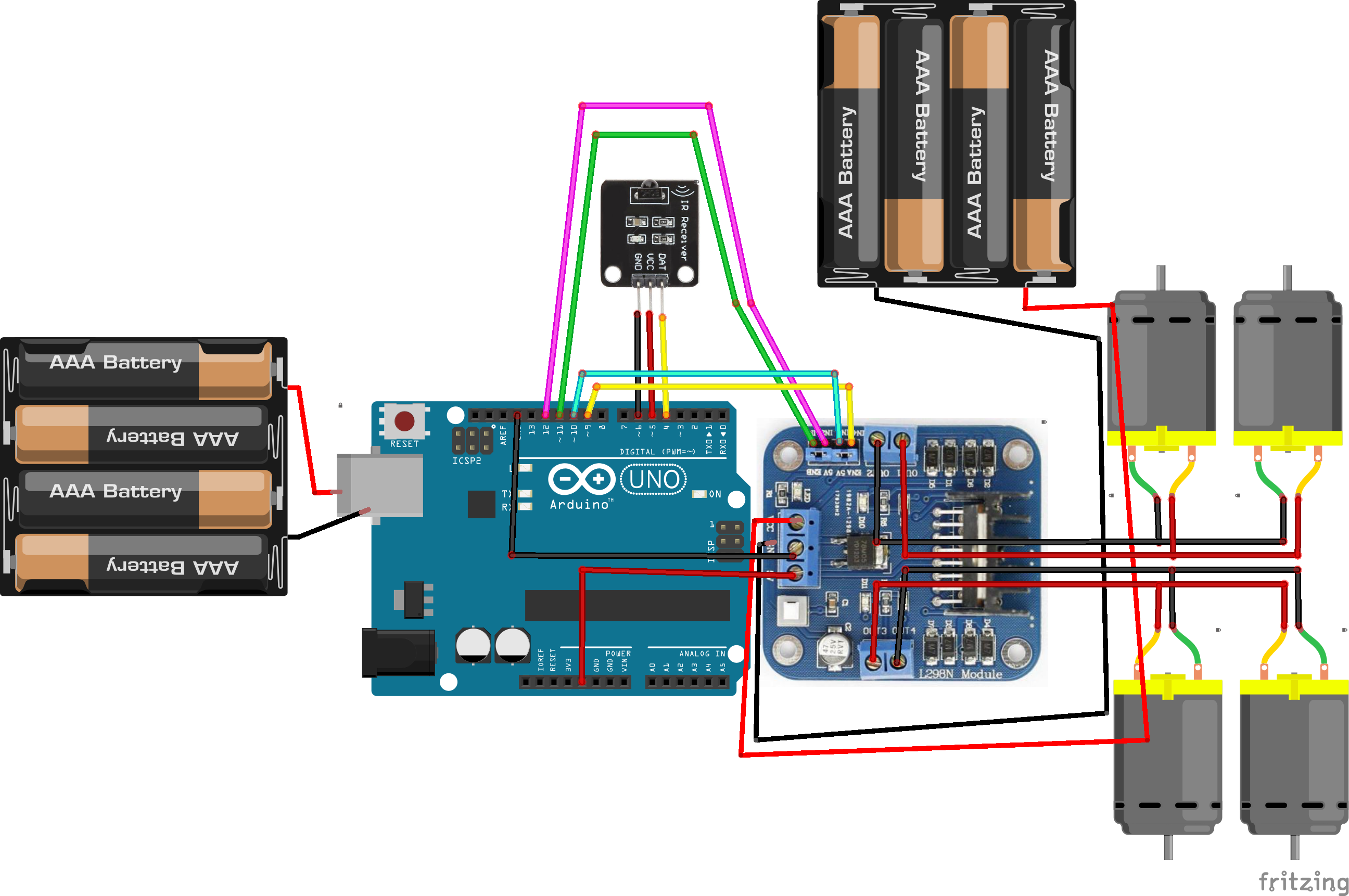
Instructables에서 원래 디자인을 찾아 버전을 만들었습니다. 원래는 트랙 차량이었고 이것은 4WD입니다. 원래 디자인에 대한 조정은 IR 설정에서 발생합니다. 원래 디자인은 모터가 작동할 때 IR 수신기를 방해하는 피드백으로 인해 어려움을 겪었습니다. 모터는 접지선이 만나는 곳에서 발전기 역할을 했습니다. IR에 대한 핀과 할당을 변경했습니다.
SAINSMART 로버 키트를 사용하는 경우 제공된 지침을 사용하여 자동차 베이스를 조립합니다. 여기에서 찾았습니다

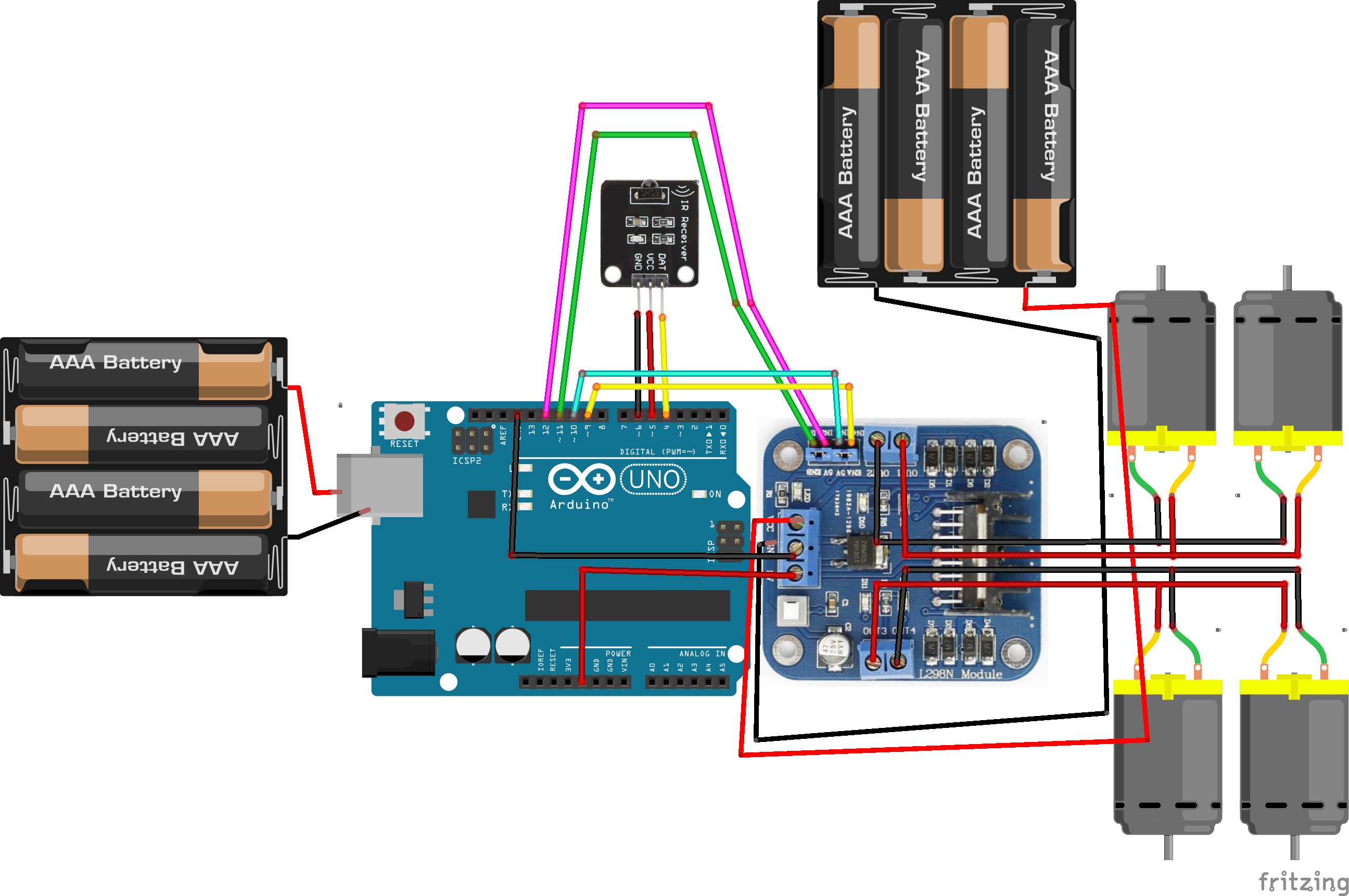
IR 수신기:
int 수신기_핀 =4; //컨트롤러의 출력 핀 4를 IR 수신기 Y에 연결합니다.
정수 vcc =5; //컨트롤러의 출력 핀 5를 IR 수신기 V에 연결합니다.
int gnd =6; //컨트롤러의 출력 핀 4를 IR 수신기 G에 연결
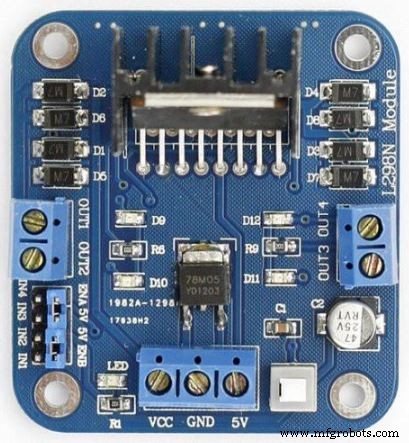
L298N 모터 드라이브 모듈:
// 모터 A
정수 enA =8;
정수 in1 =12;
정수 in2 =11;
// 모터 B
정수 enB =7;
정수 in3 =10;
정수 in4 =9;
L298N 모터 구동 모듈 GND - 컨트롤러 GND
L298N 모터 드라이브 모듈에서 모터로:
//모터 세트 A 오른쪽
연결 모터의 "+"(빨간색) 쪽을 Out 4로
모터의 "-"(검은색) 쪽을 Out 3에 연결합니다.
// 모터 세트 B 왼쪽
연결 모터의 "+"(빨간색) 쪽을 Out 2로
모터의 "-"(검은색) 쪽을 Out 1에 연결합니다.
배터리를 L298N 드라이브 모듈 "+"(빨간색)에 VCC에 연결하고 "-"(검정색)에 GND
전체 다이어그램
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
#includechar 명령;int receiver_pin =4; // IR 수신기의 출력 핀을 4번 핀에 연결합니다. vcc =5; //IR 센서용 VCCint gnd =6; //IR sensorint에 대한 GND statusled =13;IRrecv recv(receiver_pin);decode_results results;// 모터 컨트롤러 핀을 Arduino 디지털 핀에 연결// 모터 Aint enA =8;int in1 =12;int in2 =11;// 모터 Bint enB =7;int in3 =10;int in4 =9;void setup(){Serial.begin(9600);irrecv.enableIRIn();pinMode(statusled,OUTPUT);digitalWrite(statusled,LOW);//설정 출력 pinMode(enA, OUTPUT)에 대한 모든 모터 제어 핀; 핀모드(enB, 출력); 핀모드(in1, 출력); 핀모드(in2, 출력); 핀모드(in3, 출력); 핀모드(in4, 출력); 핀모드(vcc, 출력); 핀모드(gnd, 출력); // vcc 핀 하이 초기화 digitalWrite(vcc, HIGH);}void loop() {if (irrecv.decode(&results)) {digitalWrite(statusled,LOW);irrecv.resume();if (results.value ==0xFF18E7 ){ // 버튼 2 앞으로 로봇 제어를 입력합니다. // 이 함수는 모터를 고정 속도로 양방향으로 실행합니다. Serial.println("Button 2"); // 모터 A를 켭니다. digitalWrite(in1, HIGH); 디지털 쓰기(in2, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, HIGH); 디지털 쓰기(in4, LOW); // 속도를 0~255 범위에서 200으로 설정 analogWrite(enB, 100);}else if(results.value ==0xFF10EF){ // 버튼 4를 입력합니다. 로봇 제어를 왼쪽으로 돌립니다. // 이 함수는 모터 A를 실행합니다. 정방향 모터 B stop Serial.println("버튼 4"); // 모터 A를 켭니다. digitalWrite(in1, HIGH); 디지털 쓰기(in2, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, LOW); 디지털 쓰기(in4, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enB, 100); }else if(results.value ==0xFF30CF){ // 버튼 1을 왼쪽으로 회전 로봇 제어를 입력 // 이 함수는 모터 A를 정방향으로 모터 B를 역방향으로 실행합니다. Serial.println("Button Turn Right"); // 모터 A를 켭니다. digitalWrite(in1, HIGH); 디지털 쓰기(in2, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, LOW); 디지털 쓰기(in4, 높음); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enB, 100); }else if(results.value ==0xFF5AA5){ // 버튼 6을 입력합니다. 로봇 제어를 우회전합니다. // 이 함수는 모터 A를 중지하고 모터 B를 정방향으로 실행합니다. Serial.println("Button Turn Left"); // 모터 A를 켭니다. digitalWrite(in1, LOW); 디지털 쓰기(in2, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, HIGH); 디지털 쓰기(in4, LOW); // 속도를 0~255 범위에서 200으로 설정 analogWrite(enB, 100);}else if(results.value ==0xFF7A85){ // 버튼 3을 입력합니다. 오른쪽으로 회전 로봇 제어 // 이 함수는 모터 A를 실행합니다. 역방향 모터 B 순방향 // 모터 A를 켭니다. digitalWrite(in1, LOW); 디지털 쓰기(in2, 높음); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, HIGH); 디지털 쓰기(in4, LOW); // 0~255 범위에서 속도를 200으로 설정 analogWrite(enB, 100);} else if(results.value ==0xFF4AB5){ // 버튼 8 뒤로 로봇 제어// 이 함수는 모터 A와 모터를 실행합니다 B 역방향 // 모터 A를 켭니다. digitalWrite(in1, LOW); 디지털 쓰기(in2, 높음); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, LOW); 디지털 쓰기(in4, 높음); // 0~255 범위에서 속도를 200으로 설정 analogWrite(enB, 100);}else if(results.value ==0xFF38C7){ // 버튼 5를 입력합니다. 로봇 제어를 중지합니다. // 이 함수는 모터 A와 모터 B // 모터 A를 켭니다. digitalWrite(in1, LOW); 디지털 쓰기(in2, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enA, 100); // 모터 B를 켭니다. digitalWrite(in3, LOW); 디지털 쓰기(in4, LOW); // 0~255 범위 중 속도를 200으로 설정 analogWrite(enB, 100); }}}
제조공정
리모컨 자동차는 아이들에게 가장 인기 있는 장난감 중 하나이며 어른이 되어서는 더 이상 성장하기 어렵습니다. 또한 원격 제어 자동차 회로는 장치의 중요한 구성 요소 중 하나입니다. 이러한 원격 제어 장난감의 대부분이 시장에 나와 있지만 취미로 장난감을 만드는 것은 또 다른 경험입니다. 그러나 수많은 부품을 모두 조립하는 것은 어려울 수 있습니다. 또는 그 과정이 너무 혼란스러워 중간에 멈춰야 할 수도 있습니다. 고맙게도, 우리는 문제 영역을 풀고 당신을 위해 일을 더 쉽게 하기 위해 왔습니다. 따라서 이 기사에서는 간단한 PCB
HT12D 집적 회로는 212입니다. 일련의 CMOS LSI에 속하는 디코더. 18핀 디코더는 원격 제어 시스템에 적용할 수 있습니다. 더 나아가 12비트 데이터를 디코딩하는 데 도움이 되는 제3의 장치와 인터페이스합니다. 디코더의 블록 다이어그램 HT12D 디코더는 일치하는 주소 비트를 통해 HT12E와 같은 인코더와 함께 작동합니다. 일반적으로 데이터 디코딩에 인코더를 사용하는 것은 간단하고 효율적이므로 최신 애플리케이션에 선호됩니다. 이제 HT12D IC 디코더에 대해 알아보겠습니다. HT12D 핀 구성