

감지기

산업 제조
로봇 공학 연구원들은 정교한 인공 지능(A.I.) 기술을 사용하여 스스로 발을 내딛는 외골격 다리를 개발하고 있습니다. 스스로 조절하는 다리는 언젠가는 노인과 신체 장애가 있는 사람들의 움직임을 지탱할 수 있습니다.
워털루 대학의 연구원들이 구축하고 테스트한 이 시스템은 컴퓨터 비전과 딥 러닝 A.I.를 결합합니다. 사람과 같은 걸음걸이를 모방합니다. 환경 주변의 샘플 산책 컬렉션에서 "학습"하는 시스템은 감지하는 주변 환경에 따라 움직임을 조정합니다.
Brokoslaw Laschowski 는 "로봇 외골격이 스스로 제어할 수 있도록 비전을 제공합니다."라고 말했습니다. , ExoNet 이라는 워털루 대학교 연구 프로젝트를 이끄는 시스템 디자인 엔지니어링 박사 과정 .
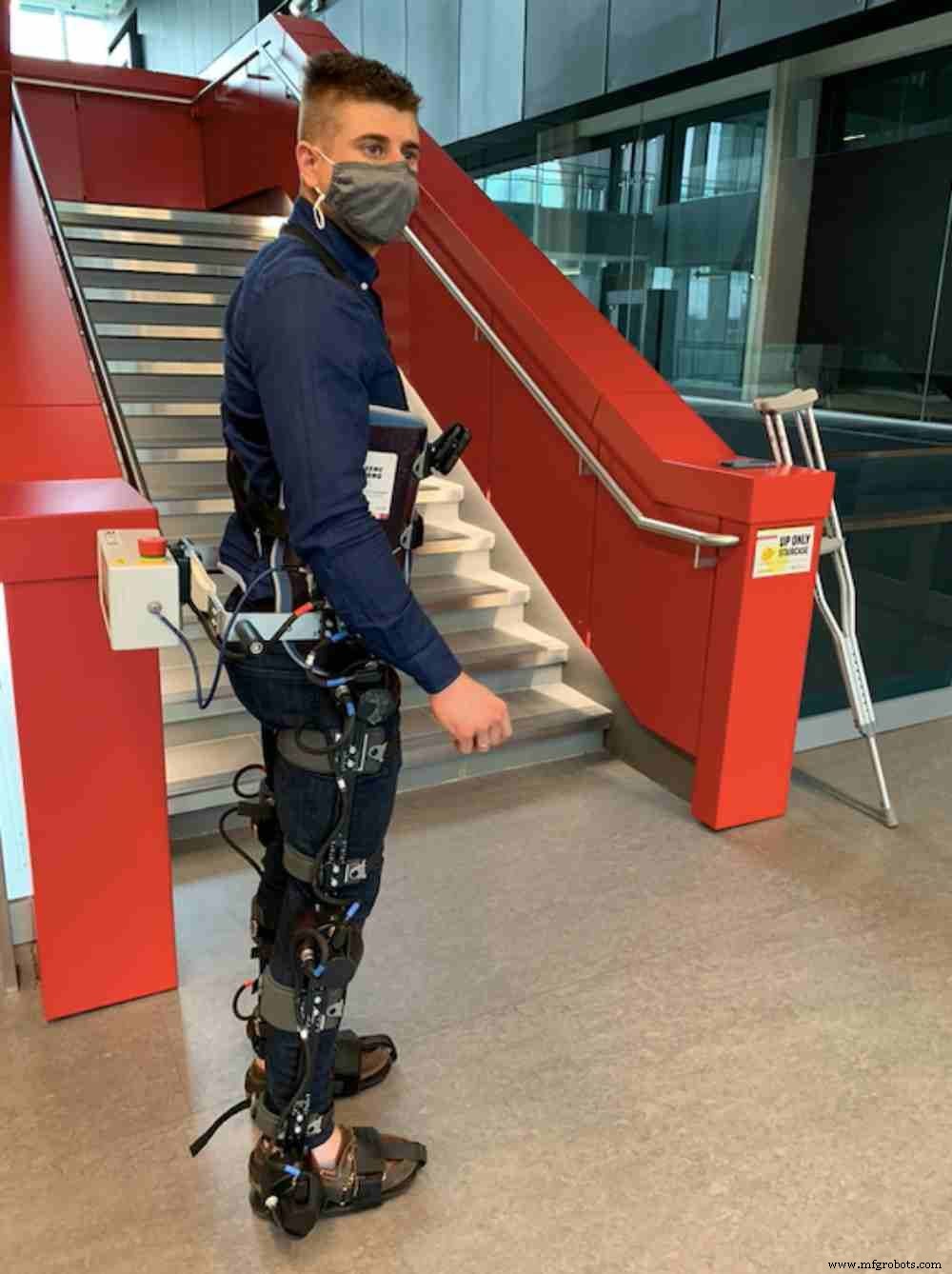
인공 지능이 지원하는 ExoNet 시스템은 팀에서 수집한 교육 데이터를 가져옵니다. 위 이미지에서 볼 수 있듯이 착용 가능한 카메라를 가슴에 착용하고 Laschowski와 동료 연구원들은 실내 및 실외 환경을 동영상으로 촬영했습니다.
일체 포함. 그런 다음 컴퓨터 소프트웨어가 비디오 피드를 처리하여 주변의 계단, 문 및 기타 기능을 정확하게 인식합니다.
이 성과는 Frontiers in Robotics and AI 저널 에 자세히 설명되어 있습니다. . (연구 데이터 세트 탐색 이 자율 외골격 프로젝트와 관련이 있습니다.)
관련 프로젝트에 관한 일련의 최신 논문인 Simulation of Stand-to-Sit Biomechanics for Robotic Exoskeletons and Prostheses with Energy Regeneration , IEEE Transactions on Medical Robotics and Bionics 저널에 실렸습니다.
모터로 작동되는 외골격 다리는 이전에 설계되었지만 착용자는 거의 항상 움직임을 제어하기 위해 조이스틱이나 스마트폰 애플리케이션이 필요했습니다.
텔아비브 대학에서 개발 중인 로봇은 자연 센서인 죽은 메뚜기의 귀 덕분에 전기 신호를 "듣습니다".
새로운 로봇은 움직이는 데 전자 장치가 필요하지 않으며 일정한 압력을 가하는 공기만 공급하면 됩니다.
"그것은 불편하고 인지적으로 까다로울 수 있습니다."라고 Laschowski가 말했습니다. “새로운 운동을 하고 싶을 때마다 멈춰 서서 스마트폰을 꺼내 원하는 모드를 선택해야 합니다.”
워털루 대학의 접근 방식은 A.I. 덕분에 보다 자동화된 제어를 제공합니다. 및 컴퓨터 비전 기능.
ExoNet 연구 프로젝트의 다음 단계는 로봇 외골격이 계단을 오르거나, 장애물을 피하거나, 사용자의 현재 움직임과 다가오는 지형에 대한 분석을 기반으로 다른 적절한 조치를 취할 수 있도록 모터에 지침을 보내는 것입니다.
또한 연구원들은 배터리를 자가 충전하기 위해 인간의 움직임을 사용하여 로봇 외골격 모터의 에너지 효율성을 개선하기 위해 노력하고 있습니다.
공학 교수인 John McPhee 가 감독하는 Laschowski는 "우리의 제어 접근 방식에는 반드시 인간의 생각이 필요한 것은 아닙니다."라고 말했습니다. , 그의 Motion Research Group 에서 Biomechatronic System Dynamics의 캐나다 연구 의장 랩. "스스로 운전하는 자율 주행 자동차와 마찬가지로 우리는 스스로 걷는 자율 외골격을 설계하고 있습니다."
기술 요약이 포함된 Q&A 아래에서 Brokoslaw Laschowski가 ExoNet 기술에 대해 자세히 설명하고 자율주행차와 유사한 기능을 가진 외골격에도 차량과 같은 안전 조치가 포함되어야 하는 이유를 설명합니다.
기술 개요 : 어떻게 안전을 보장합니까? 외골격이 실수로 위험한 일을 하는 경우 사용자가 제어할 수 있습니까? 유추는 ADAS와 완전 자율 차량입니다. 사용자는 속도와 정지 및 이동을 어떻게 제어합니까? 이러한 컨트롤은 사용자와 어떻게 연결되나요?
브로코슬라프 라쇼프스키 :안전이 가장 중요합니다. 이러한 로봇 장치는 노인 및 신체 장애가 있는 사람(예:뇌졸중, 척수 손상, 뇌성 마비, 골관절염 등)을 돕도록 설계되었습니다. 우리는 외골격이 잘못된 결정을 내리고 잠재적으로 낙상이나 부상을 일으킬 여유가 없습니다. 결과적으로 우리는 외골격이 보행 환경을 실시간으로 자율적으로 감지하고 반응할 수 있도록 환경 인식 시스템을 개발하여 분류 정확도와 제어를 향상시키는 데 전적으로 집중하고 있습니다. 우리는 임상 테스트 전에 "건강한" 컨트롤로 컴퓨터와 웨어러블 프로토타입을 사용하여 시스템 성능을 최적화하고 있습니다. 그러나 외골격 사용자는 항상 수동 제어(예:정지 및 조향)를 인계받을 수 있습니다.
기술 요약 :이런 종류의 외골격에 대해 구상 중인 애플리케이션을 안내해 주시겠습니까? 이것은 어디에 가장 가치가 있습니까?
브로코슬라프 라쇼프스키 :이 로봇 장치는 노인과 신체 장애가 있는 사람들의 보행 활동을 돕기 위해 설계되었습니다. 환경 적응형 자동화 제어 시스템의 적용 예는 다양한 운동 활동 사이를 전환하는 것입니다. 상업적으로 이용 가능한 외골격에서, 예를 들어 평지 걷기를 위해 계단을 오르기 위해 전환할 때 사용자는 모바일 인터페이스, 푸시 버튼 또는 기타 핸드 컨트롤을 사용하여 계단에 접근하고 정지하고 의도한 활동을 외골격에 수동으로 전달합니다. (기기에 따라 다름).
이와 대조적으로 자율 제어 시스템에서는 사용자가 경사 계단에 접근할 때 IMU(관성 측정 장치)와 같은 온보드 센서가 사용자의 현재 움직임을 지속적으로 감지하고 분류하며, 웨어러블 카메라 시스템은 다가오는 지형을 감지하고 분류합니다. 이러한 다양한 센서 기술과 패턴 인식 알고리즘의 융합은 사용자의 운동 의도를 예측하고 외골격을 제어하는 데 사용됩니다.
기술 요약 :인간의 생각 없이 작동하도록 외골격은 어떻게 "훈련"됩니까?
브로코슬라프 라쇼프스키 :우리는 환경 분류를 위해 컴퓨터 비전과 딥 러닝을 사용합니다. 수백만 개의 실제 이미지를 사용하여 우리의 컨볼루션 신경망은 이미지에 표시된 다양한 보행 환경을 예측하도록 자동으로 효율적으로 훈련됩니다. 보행 환경에 대한 이 정보는 이후 최적의 경로 계획, 장애물 회피 및 다양한 운동 활동(예:평지 걷기에서 계단 오르기) 간의 전환 측면에서 로봇 외골격을 제어하는 데 사용됩니다.
기술 요약 :이 외골격의 다음 단계는 무엇입니까? 지금 어떤 작업을 하고 있나요?
브로코슬라프 라쇼프스키 :안전이 중요한 관점에서 이러한 AI 구동 외골격 제어 시스템은 실시간으로 정확하게 작동해야 합니다. 따라서 우리는 온보드 실시간 추론을 촉진하기 위해 최소한의 계산 및 메모리 스토리지 요구 사항으로 신경망 아키텍처를 사용하면서 환경 분류 정확도를 향상시키는 데 중점을 두고 있습니다.
어떻게 생각하세요? 질문과 의견을 공유하세요.
감지기
목재 부품의 샌딩, 광택 또는 마무리를 개선하려는 경우 ABB의 통합 Force Control 소프트웨어보다 더 이상 찾을 필요가 없습니다. ABB는 항상 고객을 염두에 둡니다. 이것은 로봇의 품질과 회사의 놀라운 고객 서비스를 반영합니다. ABB가 개발한 자동화 솔루션은 목재 산업이 총 생산성을 높이고 타의 추종을 불허하는 정밀도와 믿을 수 없을 정도로 빠른 ROI를 제공하고 제품 생산의 전체 속도를 높이는 데 도움이 됩니다. 이러한 통계를 보면 그들이 목재 부문에 서비스를 제공하는 선도적인 로봇 제조업체 중 하나라는 것은 놀라
로봇 워크셀은 주어진 로봇 애플리케이션에 대해 효율성을 개선하고 비용을 절감하며 부품 품질을 개선하는 방식으로 설계되어야 합니다. 사전 엔지니어링된 워크셀은 린 제조 원칙에 따라 설계되어 애플리케이션 흐름을 개선하고 공정 중 낭비를 제거합니다. asq.org에서 정의한 바와 같이 Lean Manufacturing은 “낭비를 제거하여 효율성과 효과를 개선하기 위한 일련의 관리 관행입니다. 린의 핵심 원칙은 비부가가치 활동과 낭비를 줄이고 제거하는 것입니다.” Workcell은 핵심 구성 요소이지만 안전 장벽일 뿐만 아니라 멀티태스