

산업기술

산업 제조
서보 모터는 산업뿐만 아니라 ROBOTICS에서 널리 사용되며, 서보는 로봇 팔, RC 자동차, 레이더 접시, 컨베이어 벨트, 안테나 위치 지정, 카메라 자동 초점, 인쇄 공정 등과 같은 오늘날 ROBOTICS 프로젝트의 핵심입니다.
많은 취미 프로젝트에서 서보 모터가 널리 사용됩니다. 이 기사가 실제로 서보가 무엇인지, 서보 모터의 기본 작동 원리, 다양한 서보, 서보 모터와 일반 DC 모터의 기본 비교에 대한 간략한 정보를 제공하기를 바랍니다.

“ 부정적인 피드백에 반응하여 모션을 조절하는 경우 명령에 응답하여 모션을 제공하는 장치입니다. “
서보의 주요 특징은 샤프트의 위치를 정밀하게 제어하는 것입니다. 이것은 기본적으로 폐쇄 루프 시스템(즉, 네거티브 피드백)입니다.
서보의 폐쇄 루프 시스템에는 네 가지 주요 부분이 있습니다.
서보 모터의 주요 부품은 소형 DC 모터입니다. 이러한 DC 모터는 고속(즉, 높은 RPM) 및 매우 낮은 토크(즉, 작업을 담당하는 비틀림 힘)입니다. 기본적으로 소형 DC 모터는 속도가 매우 빠르지만 토크가 훨씬 더 크지 않습니다(즉, 작은 힘과 더 큰 거리). 그러나 서보 내부의 기어 설계는 DC 모터의 이러한 고속 및 저 토크를 더 느린 속도와 더 높은 토크(즉, 작은 거리, 더 큰 힘)로 변환합니다.
많은 DC 모터가 5000RPM 부근에서 더 빠르지만 기어는 이 매우 높은 RPM을 약 60RPM 및 높은 토크로 줄입니다. 저렴한 서보는 무게를 더 가볍고 저렴하게 유지하기 위해 플라스틱으로 구성된 기어를 사용하는 반면, 더 무거운 작업(즉, 매우 높은 토크)을 위해 설계된 서보는 예를 들어 산업에서 사용되는 서보와 같이 금속으로 구성된 기어를 사용합니다. .
입력선을 통해 처음 서보에 전원을 인가하면 DC 모터는 매우 높은 RPM과 매우 작은 토크로 회전하지만 기어에 의해 서보의 축이 느려진다.
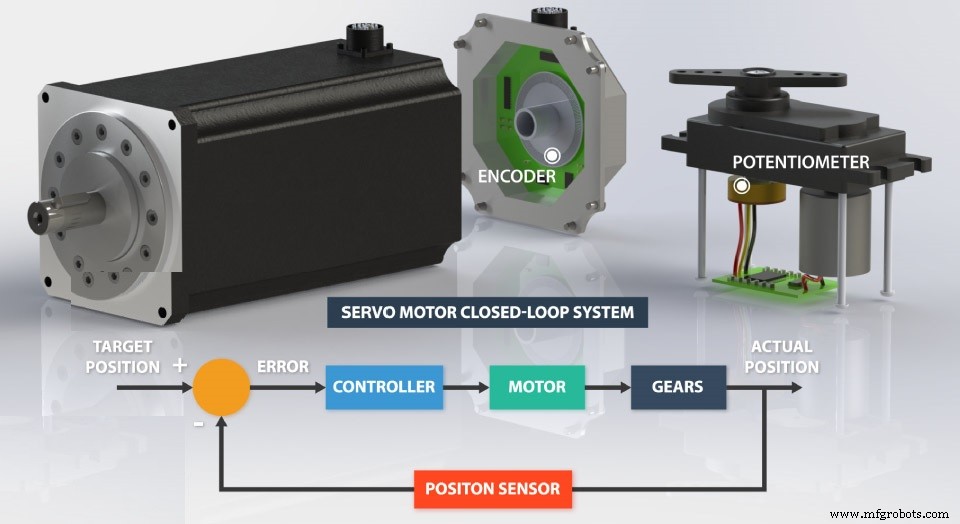 위치 피드백 센서는 서보의 위치를 정밀하게 제어하기 위해 네거티브 피드백 배열로 연결되어 있기 때문에 원하는 위치. 산업용 서보의 위치 피드백 센서는 고정밀 인코더이지만 취미로 서보의 위치 센서는 전위차계입니다. 최종 기어의 위치 센서(예:전위차계)는 오류 감지기를 포함하는 회로에 연결됩니다(즉, 이 오류 감지기는 기본적으로 두 신호를 비교하는 비교기입니다. 하나는 목표 위치라고도 하는 입력 라인과 다른 하나는 출력 신호입니다. 실제 위치라고도 하는 전위차계와 보드에 내장된 컨트롤러 IC를 통해
위치 피드백 센서는 서보의 위치를 정밀하게 제어하기 위해 네거티브 피드백 배열로 연결되어 있기 때문에 원하는 위치. 산업용 서보의 위치 피드백 센서는 고정밀 인코더이지만 취미로 서보의 위치 센서는 전위차계입니다. 최종 기어의 위치 센서(예:전위차계)는 오류 감지기를 포함하는 회로에 연결됩니다(즉, 이 오류 감지기는 기본적으로 두 신호를 비교하는 비교기입니다. 하나는 목표 위치라고도 하는 입력 라인과 다른 하나는 출력 신호입니다. 실제 위치라고도 하는 전위차계와 보드에 내장된 컨트롤러 IC를 통해
기어의 회전으로 인해 전위차계의 손잡이가 회전하고 결과적으로 오류 감지기에 연결된 전압이 생성됩니다. 이제 컨트롤러 IC(즉, 이 컨트롤러는 칩에 통합된 H-Bridge)에 연결된 비교기에 의한 두 신호의 비교로 인해 오류가 발생합니다. 비교 후 목표 위치를 달성하기 위해 어느 방향으로든 샤프트의 회전을 결정하는 컨트롤러를 활성화하는 오류가 생성됩니다. 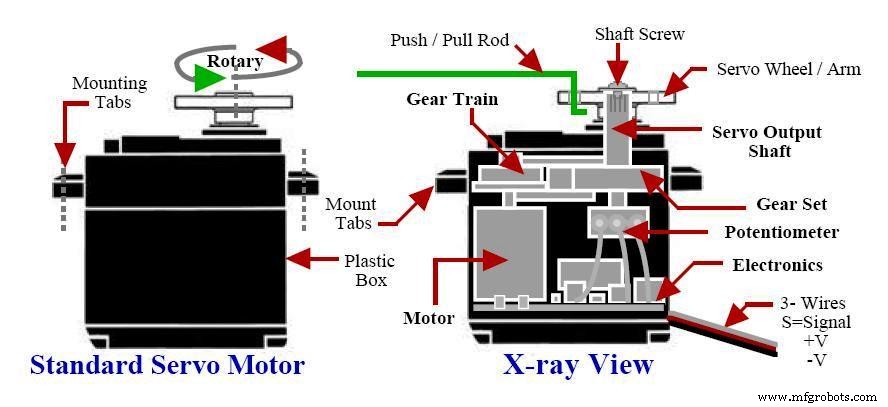
서보는 다양한 종류로 제공됩니다.
출력 샤프트는 180도만 회전합니다. 범위를 벗어나는 샤프트의 추가 회전을 제한하기 위해 추가 스톱이 위치합니다(예:ROBOTIC 암, 방향타 등)
위치 회전 서보와 유사하지만 연속적으로 360도 회전할 수 있습니다. 서보에 전송된 명령은 서보가 다양한 속도로 시계 방향 또는 시계 반대 방향으로 회전하도록 합니다(예:RADAR 접시 등).
이 서보의 움직임은 원형이 아닌 앞뒤 방향입니다(예:CNC 기계, 3D 프린터 등).
서보 모터는 앞뒤로 180도 회전할 수 있지만 DC 모터는 전원이 공급되는 한 360도 회전할 수 있습니다. 요즘 서보는 360도 회전이 가능한 연속 회전도 가능하지만 기어 설계로 인해 서보의 속도가 DC 모터에 비해 느리다. DC 모터는 자유 실행 로봇에 가장 적합한 선택이지만 정밀도가 필요한 경우(예:ROBOTIC ARM, 와이퍼 보트 방향타 등) 서보가 가장 좋습니다.
DC 모터의 속도는 PWM(펄스 폭 변조) 기술에 의해 제어됩니다(즉, 듀티 사이클을 변경하여 DC 모터의 속도를 제어할 수 있음). 예:듀티 사이클이 50%보다 크면 속도가 빨라지고 듀티 사이클이 50% 미만이면 속도가 느려집니다.
서보 모터의 PWM 기술은 속도보다는 샤프트의 위치를 결정합니다. 명령이 서보에 전송되면 샤프트의 위치를 원하는 위치로 정확하게 설정합니다. 따라서 샤프트의 이러한 자동 조정 동작으로 인해 서보는 ROBOTICS 응용 프로그램에 완벽한 선택이 됩니다.
산업기술
당신은 당신의 기술을 테스트할 간단한 프로젝트를 찾는 초보자입니까, 아니면 구축할 재미있는 프로젝트를 찾는 노련한 애호가입니까? 잘 찾아오셨습니다. 박수 스위치라는 간단하고 흥미로운 프로젝트를 소개합니다. 여기에서 흥미로운 점을 찾을 수 있습니다. 이 회로를 사용하면 박수 소리로 가전 제품을 쉽게 제어할 수 있습니다. 아직 관심이 있으세요? 이 기사에서는 박수 스위치가 작동하는 방식에 대한 모든 것을 배우고 간단한 박수 스위치 회로를 만드는 방법도 배우게 됩니다. 준비 되었나요? 그럼 바로 들어가 볼까요! 박수 스위치란 무엇
마이크로:비트 프로그래밍 요구 사항에 맞는 완벽한 마이크로컨트롤러를 찾는 초보자입니까? 필요한 것은 Micro:bit Projects입니다. 사실, 마이크로비트로 구축할 수 있는 많은 것들이 있습니다. 어디서부터 시작해야 할지 혼란스러울 정도입니다. 하지만 걱정할 필요가 없습니다. 이 기사에서는 회로에 추가할 수 있는 초보자용 Micro:bit 프로젝트 11개를 보여줍니다. 마이크로:비트란 무엇입니까 micro:bit는 개발 보드에서 프로그래밍을 시작하려는 모든 사람에게 환상적인 프로젝트입니다. 또한 어린이와 프로그래밍