

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
 |
| |||
 |
| |||
 |
|
| |
| |||
 |
|
조립 라인에서 부품을 운반하는 멋진 로봇이 어떻게 작동하는지 궁금하신가요? 여기 폴란드의 Opel 공장에서 그런 로봇을 보았고 많은 질문을 했고 작동 방식을 설명해 주었습니다. 저는 이것이 단지 정말 고급 라인 팔로워라는 것을 즉시 이해했습니다. 검은색 테이프 대신 마그네틱 스트립이 있고 광 센서 대신 마그네틱 센서가 있으며 안전 기능과 기타 스마트한 것들이 많이 있습니다. 하지만 이 시점에서 나는 물건을 현명하게 운반할 수 있는 더 작고 저렴한 Arduino 기반의 오픈 소스 버전의 로봇을 직접 만들 수 있다고 생각하기 시작했습니다. 큰 도전처럼 들립니다. 그게 제가 좋아하는 것입니다!
디자인
먼저 종이에 디자인했습니다! 네, 연필을 들고 종이에 그려요 :) 멋진 CAD 소프트웨어가 있는데 왜 종이에 디자인을 합니까? 다른 분들의 이야기를 듣고 제가 직접 확인한 몇 가지 장점이 있습니다. 당신은 정말 자유롭고, 종이에 제한이 없으며, 산만하지 않은 빈 공간과 일을 정말 쉽게 만드는 연필만 있습니다. 또한 치수와 최종 모양에 대해 걱정할 필요가 없습니다. 그린 것이 마음에 들지 않으면 다시 그리기만 하면 됩니다. 모든 그림을 한 번에 볼 때 함께 결합하여 표시할 수 있습니다. 새로운 아이디어로 :) 종이에 그림을 그려서 전체적으로 마음에 드는 모양을 찾은 다음 CAD로 이동하여 그림에 치수를 추가하는 것이 매우 쉬웠습니다. 모두에게 이 기술을 정말 추천합니다! 여기 내 그림이 있습니다(오른쪽에 있는 다채로운 선은 내 동생의 창의력입니다)
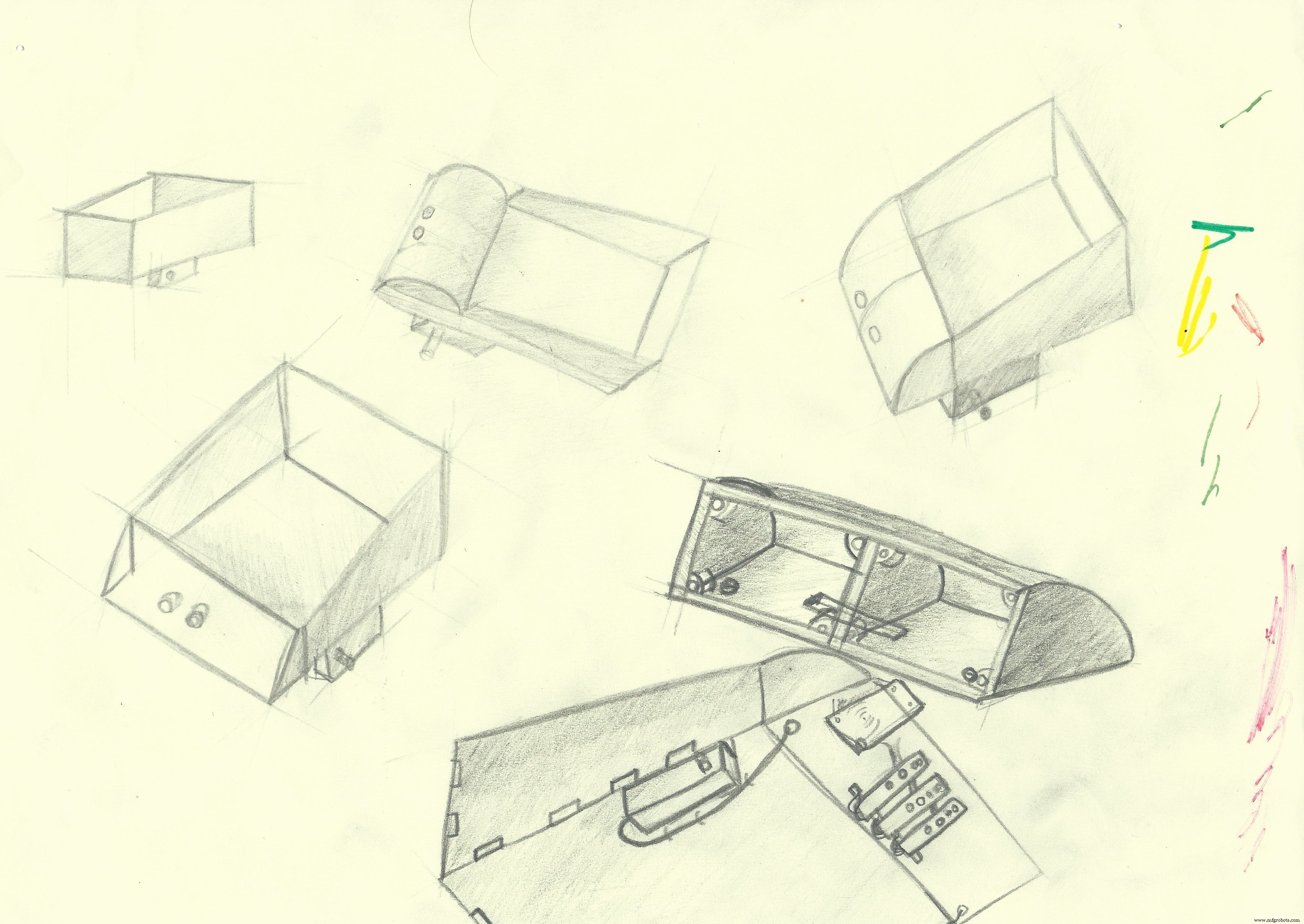
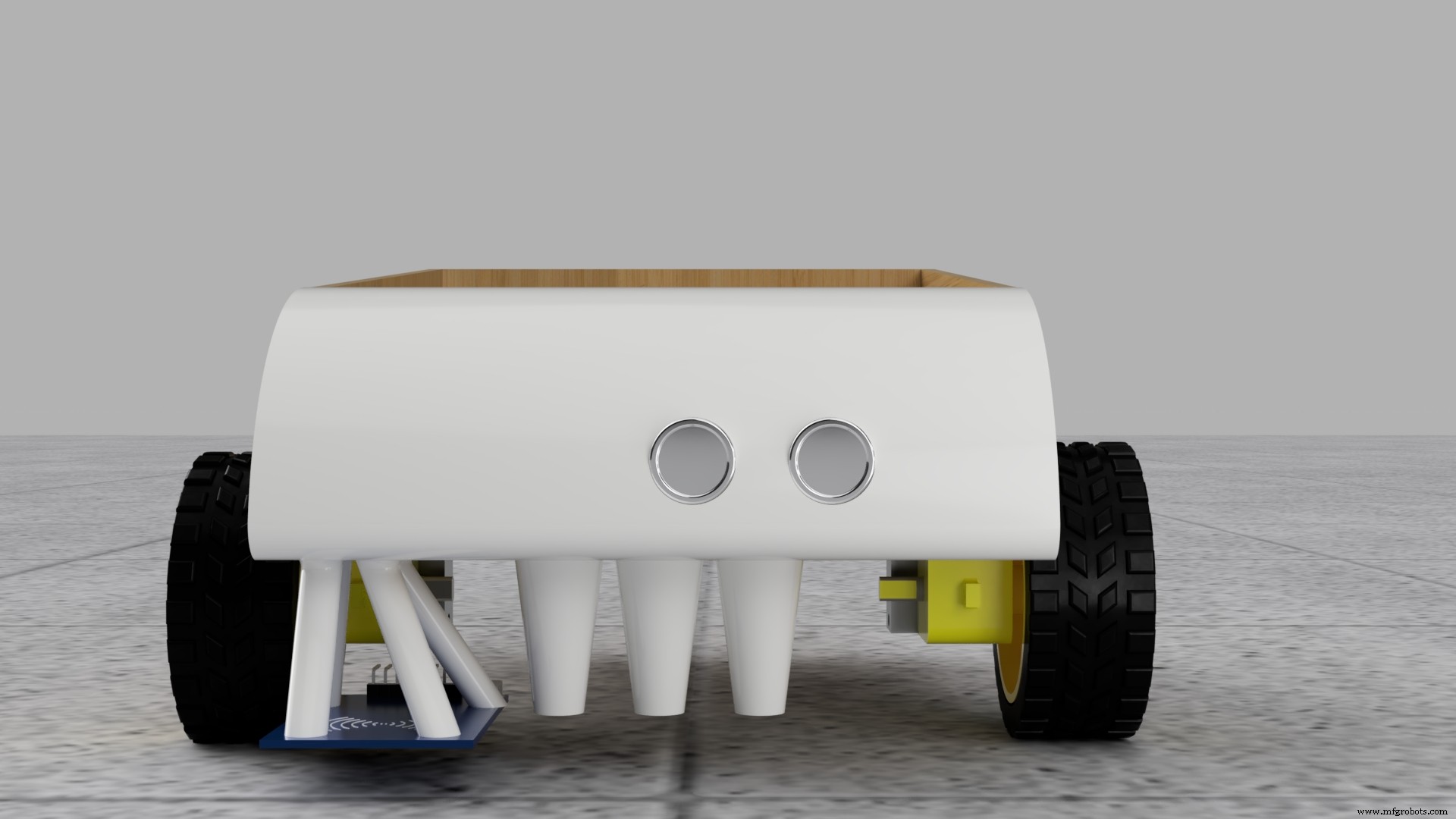
물론 제 그림은 잘 그리지 못해서 5분만에 그림을 그리면 더 좋아지겠지만 저는 원래 그림을 잘 못그리는데 위의 예가 흐뭇해 보입니다. 그런 다음 그 도면을 기반으로 CAD 디자인을 만들었습니다. 나는 처음부터 이 로봇의 일부가 3D 프린팅될 것이라는 것을 알고 있었지만, 100% 3D 프린팅으로 만들고 싶지 않았고 새로운 것을 실험하고 시도하고 싶었습니다. 마지막으로 레이저 절단기로 일부 부품을 절단하기로 결정했지만 부품이 없고 레이저 절단용으로 설계한 적도 없습니다. 그 방법을 배우고 온라인으로 주문했습니다. 재료로 4mm 합판을 선택했습니다(플렉시 또는 이와 유사한 것을 사용할 수도 있습니다). 로봇의 앞 부분은 3D 프린팅되어 있으며 모든 센서, 전자 제품 및 배터리를 고정합니다. 여기 내 생각에 환상적으로 보이는 내 디자인의 렌더링이 있습니다!

다음 단계는 그 나무 판의 레이저 절단을 주문하는 것이 었습니다. 저는 폴란드에서 왔기 때문에 운송비를 절약하기 위해 그렇게하는 폴란드 회사를 찾았습니다. Google 레이저 커팅과 도시 이름만 있으면 주변에서 무언가를 쉽게 찾을 수 있습니다. 손가락 관절이 완벽하게 맞도록 해당 부품의 오프셋을 조정할 수 있는지 회사에 문의하십시오(커프라는 작업 때문에 그렇게 해야 합니다. 자세한 내용은 여기에서 읽을 수 있음). 다행히도 저를 대신해 처리해 주는 회사를 찾았습니다. 감사합니다!
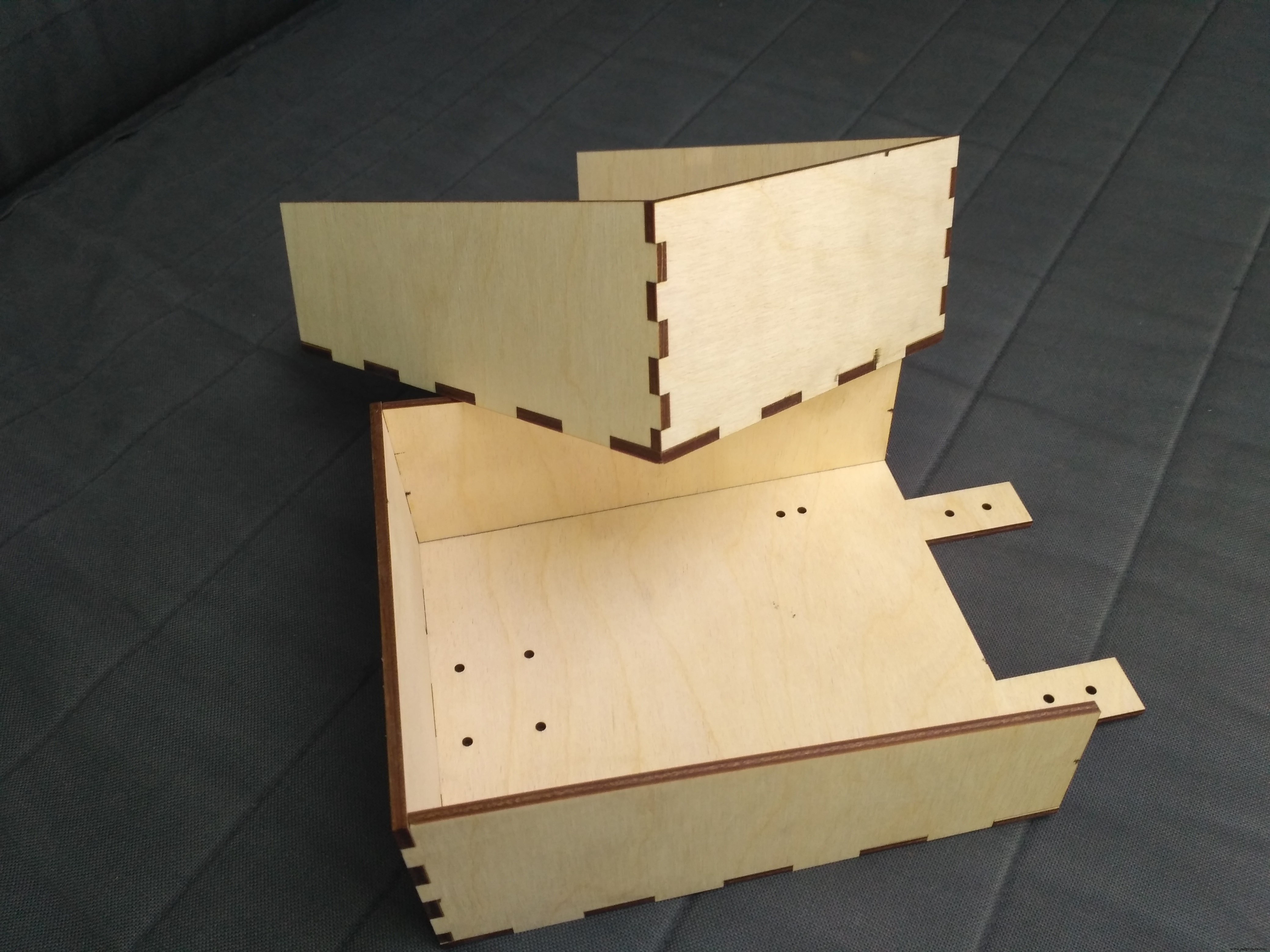
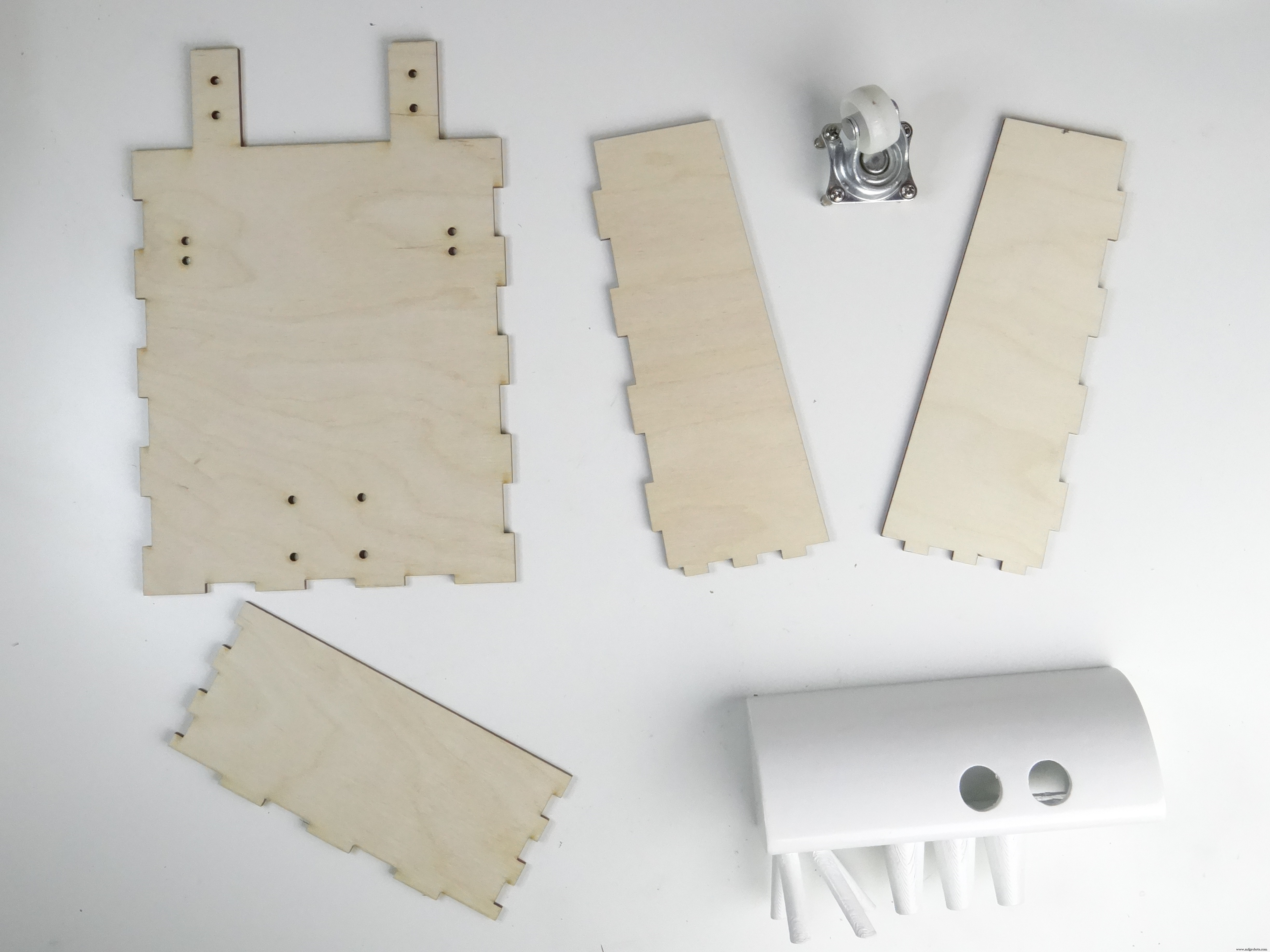
레이저 커팅용으로 디자인한 적도 없고 레이저 커팅된 부품도 써본 적이 없어서 상당히 두려웠는데, 예쁘게 나왔네요 :) 레이저 커팅용 DXF 파일은 아래 첨부파일에서 확인하실 수 있습니다.
섀시를 완성하기 위해 3D 프린터로 앞 부분을 인쇄해야 했습니다. 그것은 제가 가지고 있는 도구이므로 문제가 되지 않았습니다. 아직 3D 프린터가 없다면 구입을 고려하십시오. 꽤 큽니다. 요즘 싸다. 학교나 도서관에서 찾을 수도 있고 친구 중 한 명이 3D 프린팅 애호가일 수도 있습니다. STL 파일은 아래 첨부 섹션에서 찾을 수 있습니다. 3D 프린팅을 위한 특별한 설정은 없습니다. 저는 30% 인필과 0.2mm 레이어 높이로 2개의 둘레를 사용했습니다. 이 부분을 인쇄하려면 지지대를 사용해야 합니다. 약 8시간 정도 소요되니 조금만 기다려주세요.
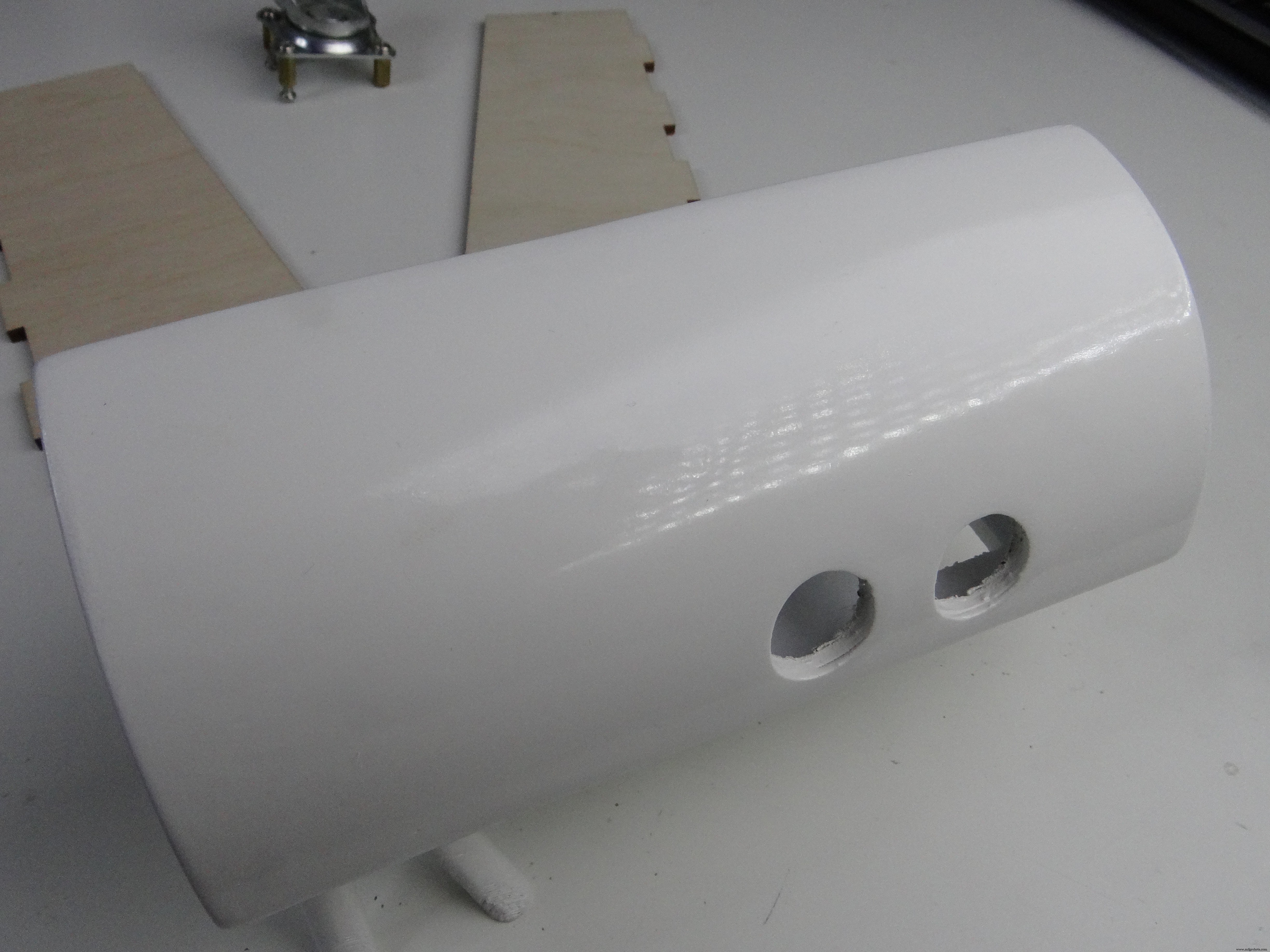
인쇄가 끝나면 청소하고 합판 부품을 조일 수 있지만 더 많은 작업을 수행하기로 결정했습니다. 다시 한 번도 해본 적이 없는 작업입니다. 인쇄물을 샌딩하고 페인트하고 다시 샌딩하고 페인트한 다음 자동차 필러를 사용하여 표면을 완벽하게 만든 다음 샌딩 및 페인팅을 더 많이 했습니다. 시간이 많이 걸렸지만 저도 많이 배웠고 이 반짝거리는 표면을 한번만 봐주세요! 완벽합니다. 3D 프린터로 인쇄한 것인지 전혀 알 수 없습니다! 2일 동안의 페인팅 및 샌딩 작업은 그만한 가치가 있습니다.
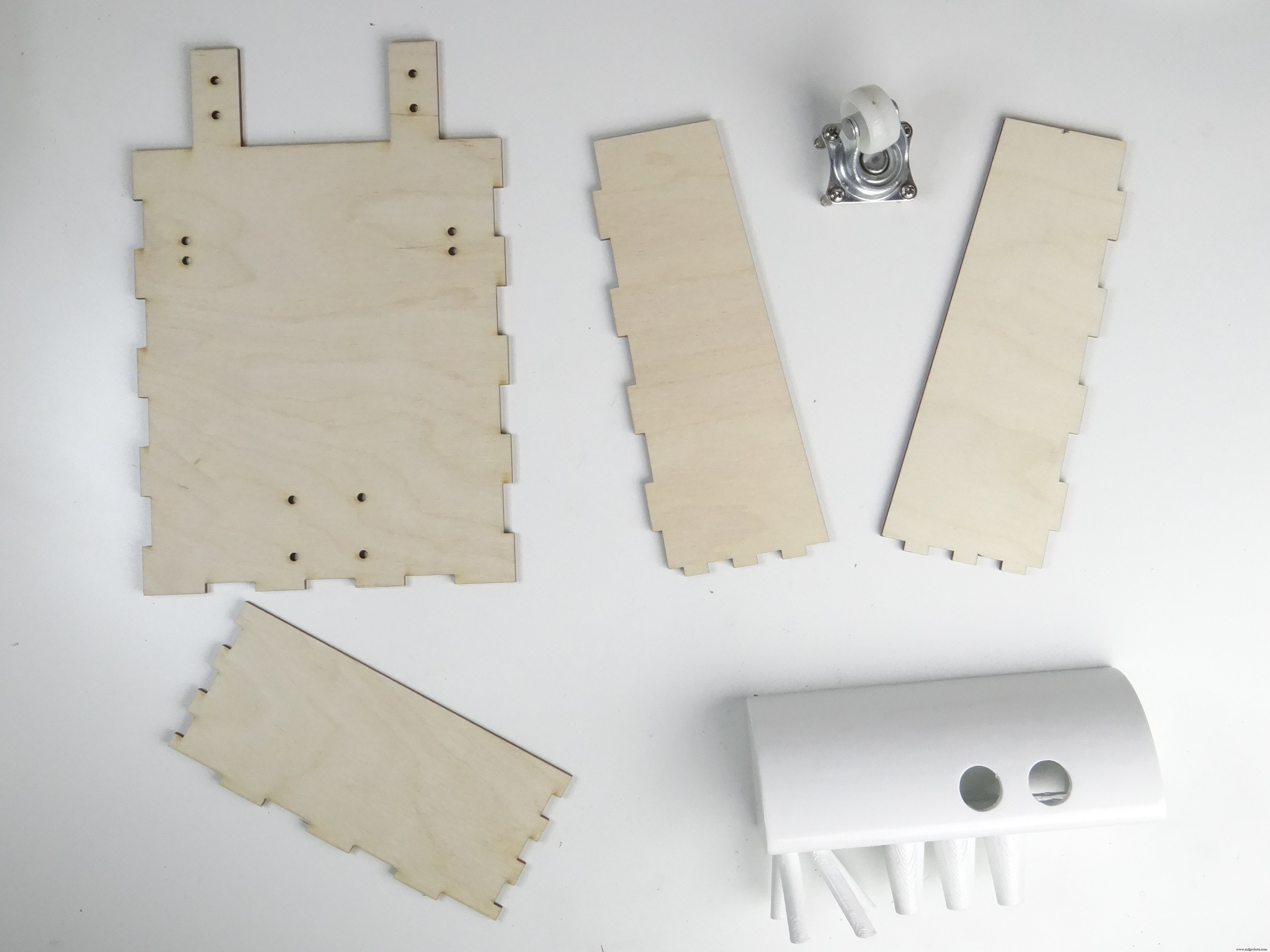
그리고 조립을 위해 준비한 레이저 컷 부품과 3D 프린팅 부품입니다.
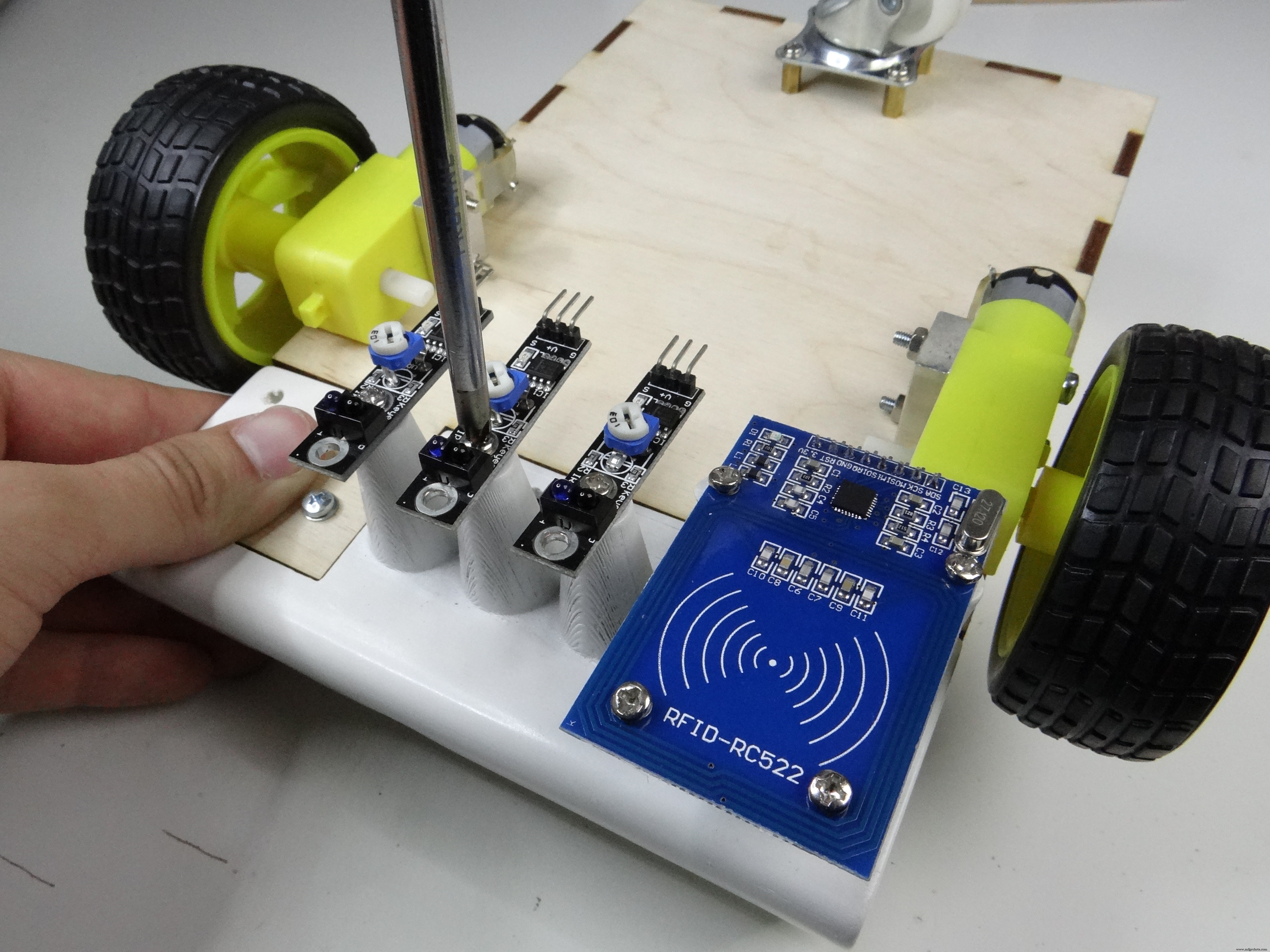
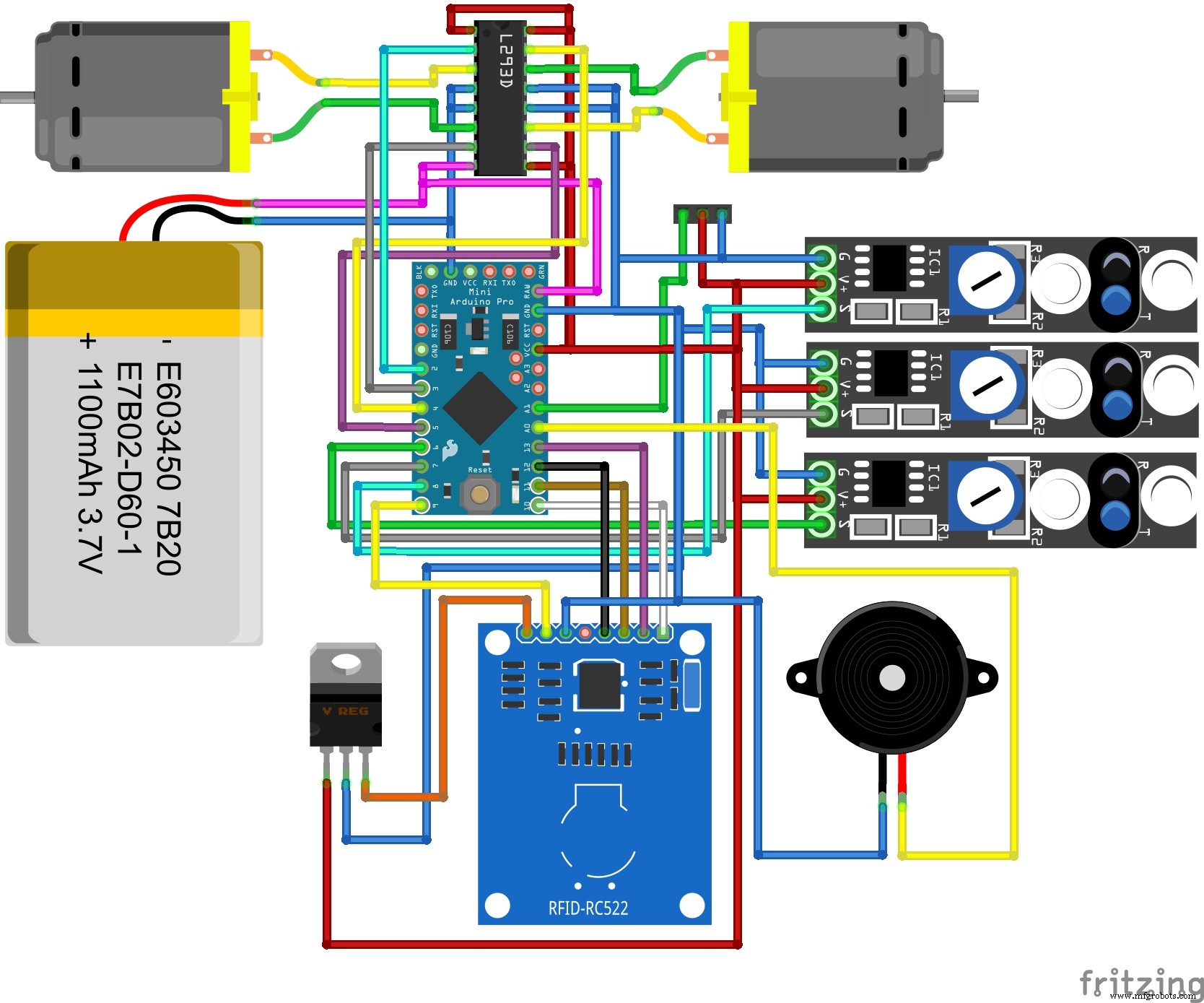
Arduino, 센서, 모터, PCB...
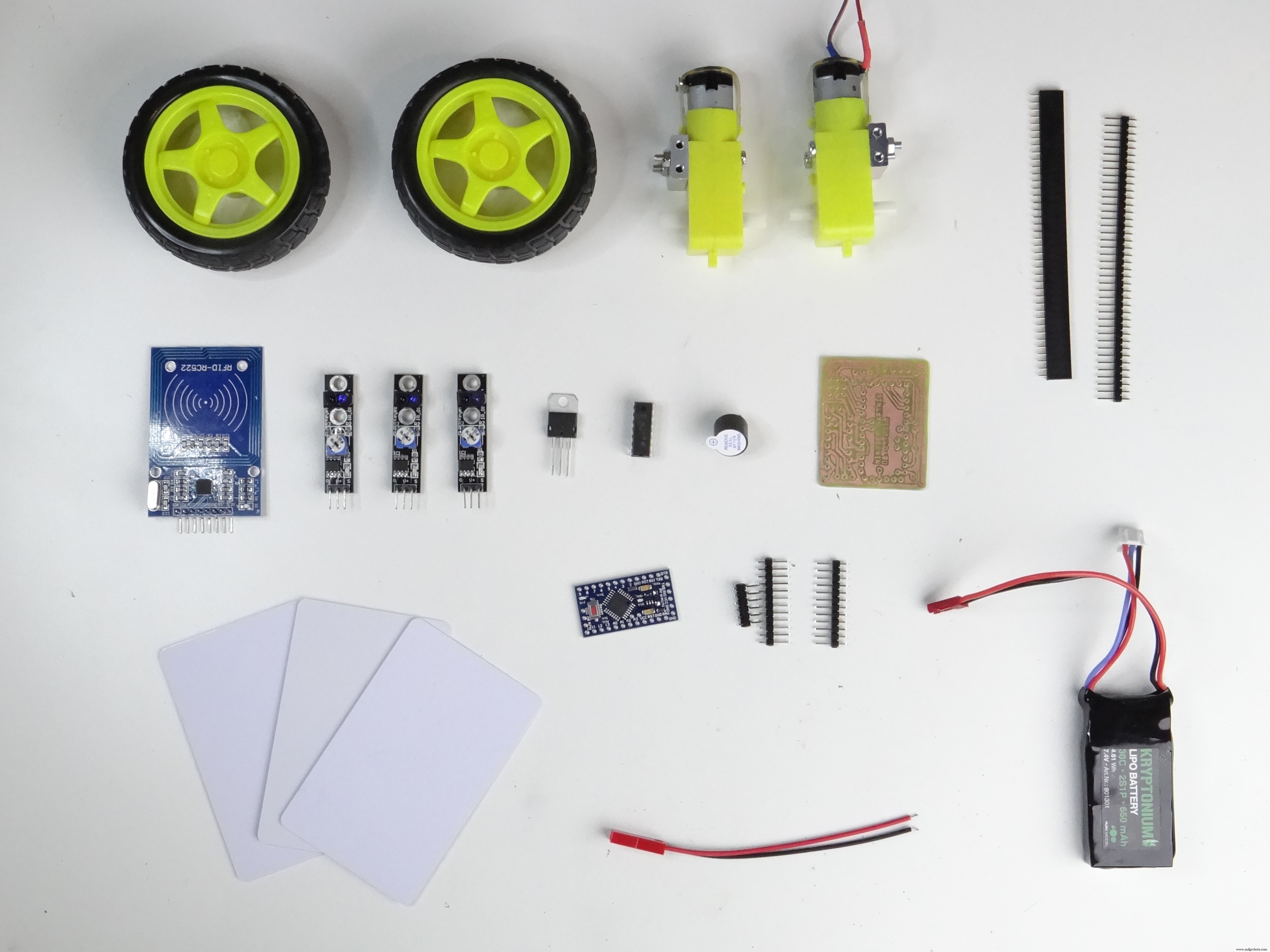
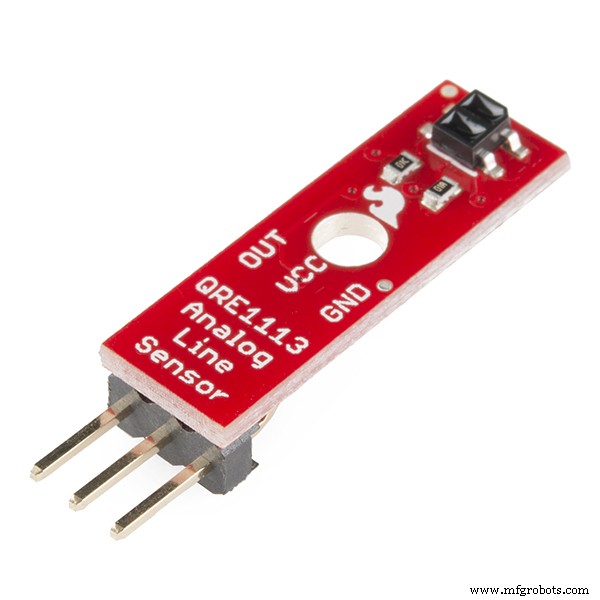
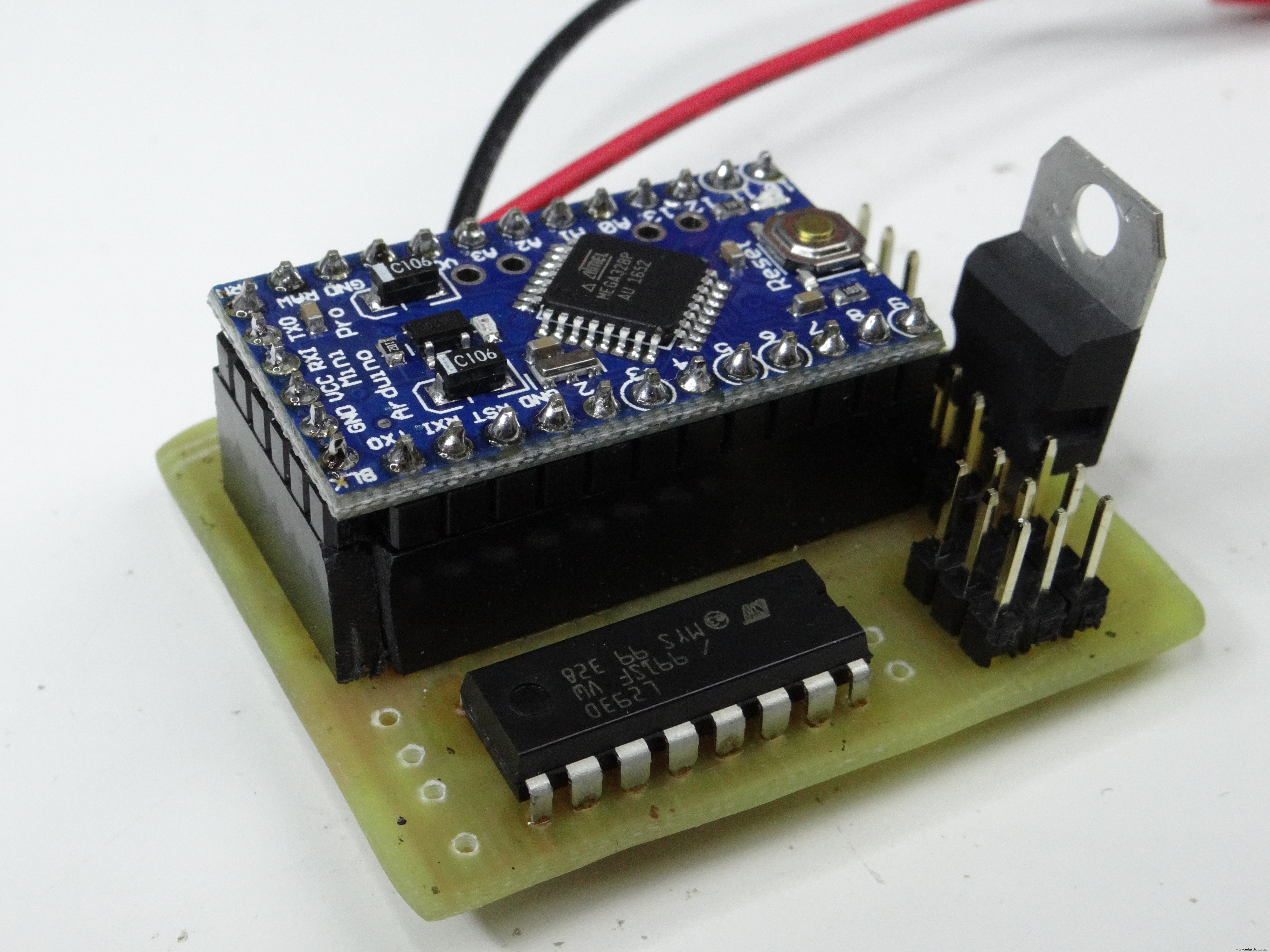
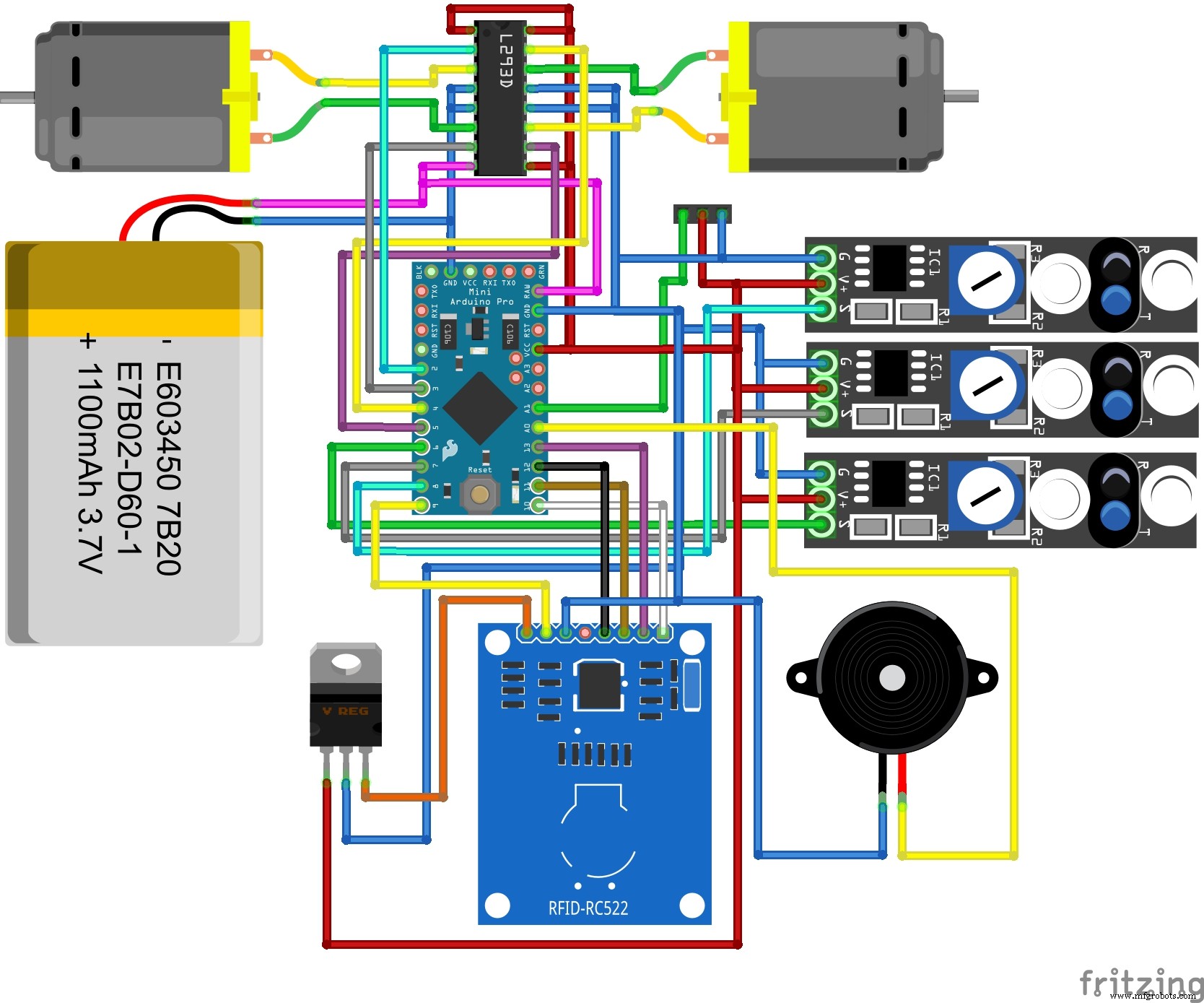
그러나 이 프로젝트는 물론 디자인에 관한 것만은 아닙니다. 모든 것은 내가 Fritzing에서 디자인한 맞춤형 PCB에 연결된 Arduino pro mini에 의해 제어됩니다(PCB 레이아웃 및 디자인 파일은 첨부 파일에서 찾을 수 있습니다). 사람의 입력 없이 자체적으로 작동하도록 하기 위해 라인 옆에 배치된 태그를 감지하는 라인 센서와 RFID 모듈도 있습니다. 저렴하고 대중적인 기어 모터를 제어하는 H 브릿지는 L293D로 작고 사용하기 쉽습니다. 나는 또한 특정 RFID 태그가 감지될 때 로봇이 삐 소리를 낼 수 있도록 회로에 부저를 추가하기로 결정했습니다. 모든 것은 2셀 LiPo 배터리(7, 4V의 공칭 전압)로 전원이 공급됩니다. RFID 모듈은 3,3V로 전원이 공급되어야 하기 때문에 모듈에 적절한 전압을 공급할 수 있도록 PCB에 전압 레귤레이터를 추가해야 했습니다. 안전 제일이라고 하는 장애물을 감지하는 초음파 센서도 있습니다! 한 가지 문제가 있었습니다. HC-SR04의 판독 거리는 마이크로 컨트롤러 측면에서 상당히 많은 시간이 소요되므로 이 센서로 장애물을 쉽고 빠르게 감지할 수 있는 다른 프로젝트(자세한 정보는 여기)를 설계했습니다. 꼭 필요한 것은 아니지만 확실히 작업이 훨씬 쉬워집니다.
PCB를 구축하려면 몇 가지 도구와 구성 요소(Arduino, L293D, 일부 분리 헤더, 배터리 커넥터, 부저, 3, 3V 전압 조정기)가 필요합니다. 집에서 PCB를 만드는 방법과 필요한 도구에 대해 자세히 알아볼 수 있습니다.
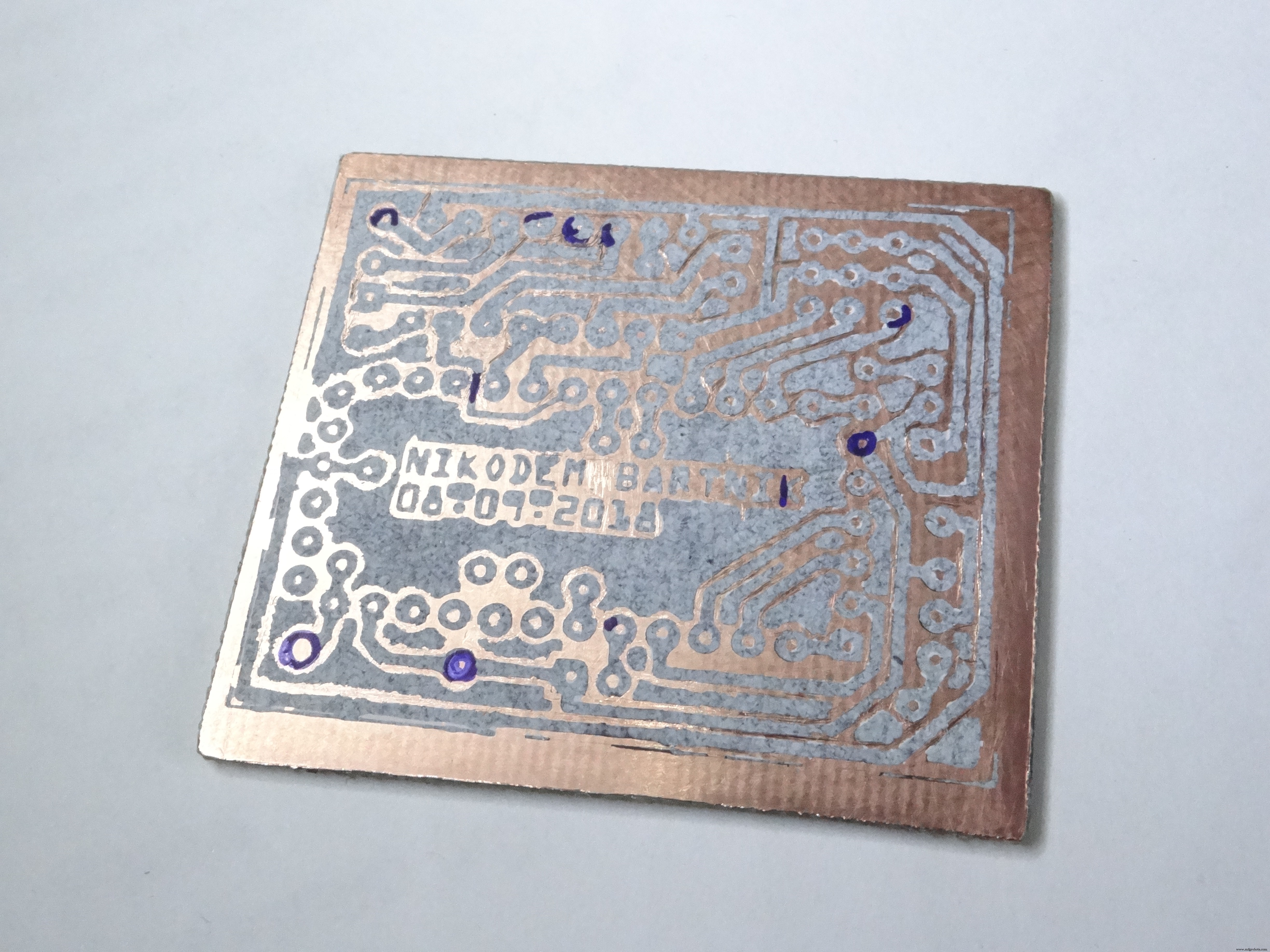
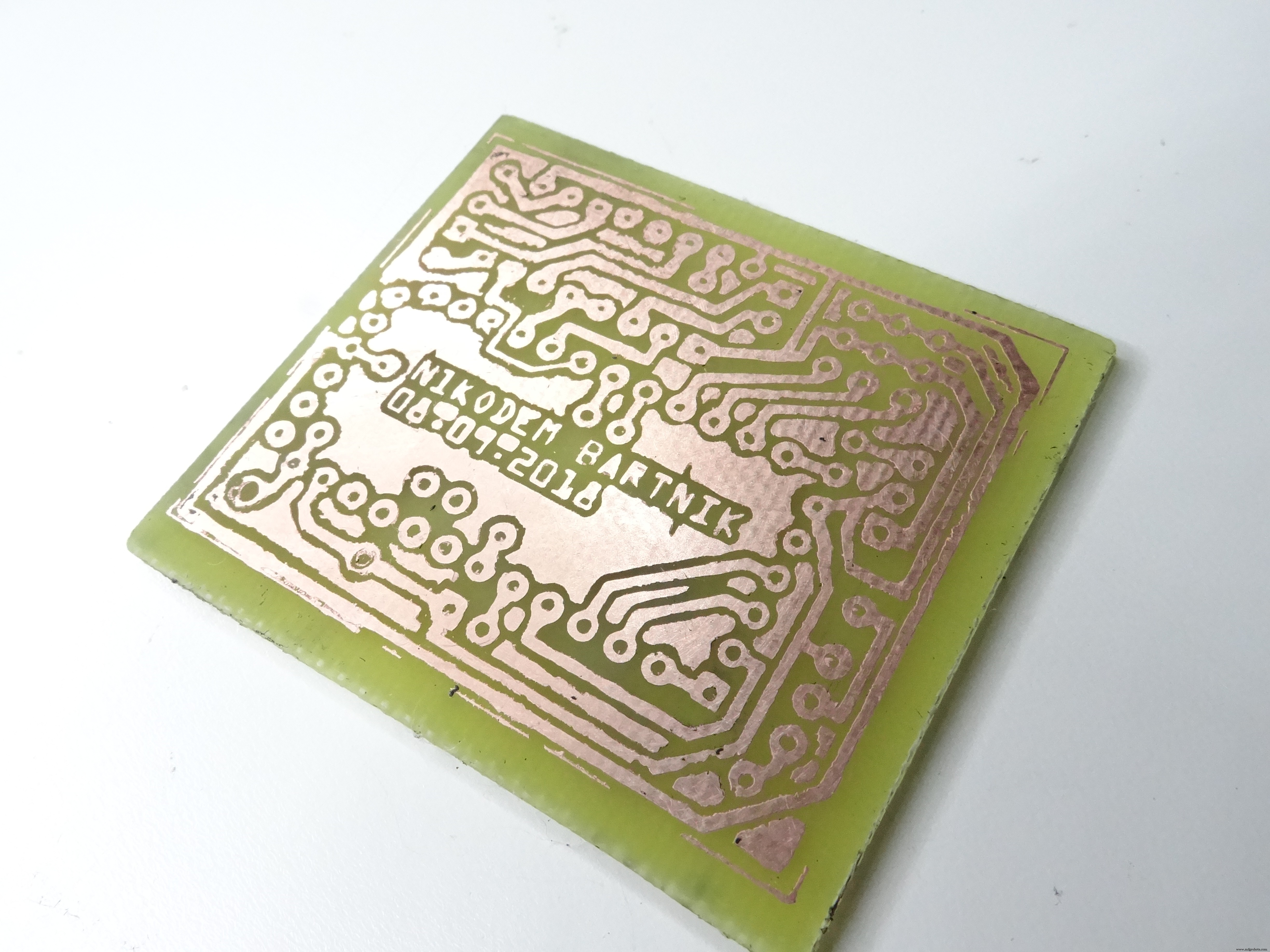
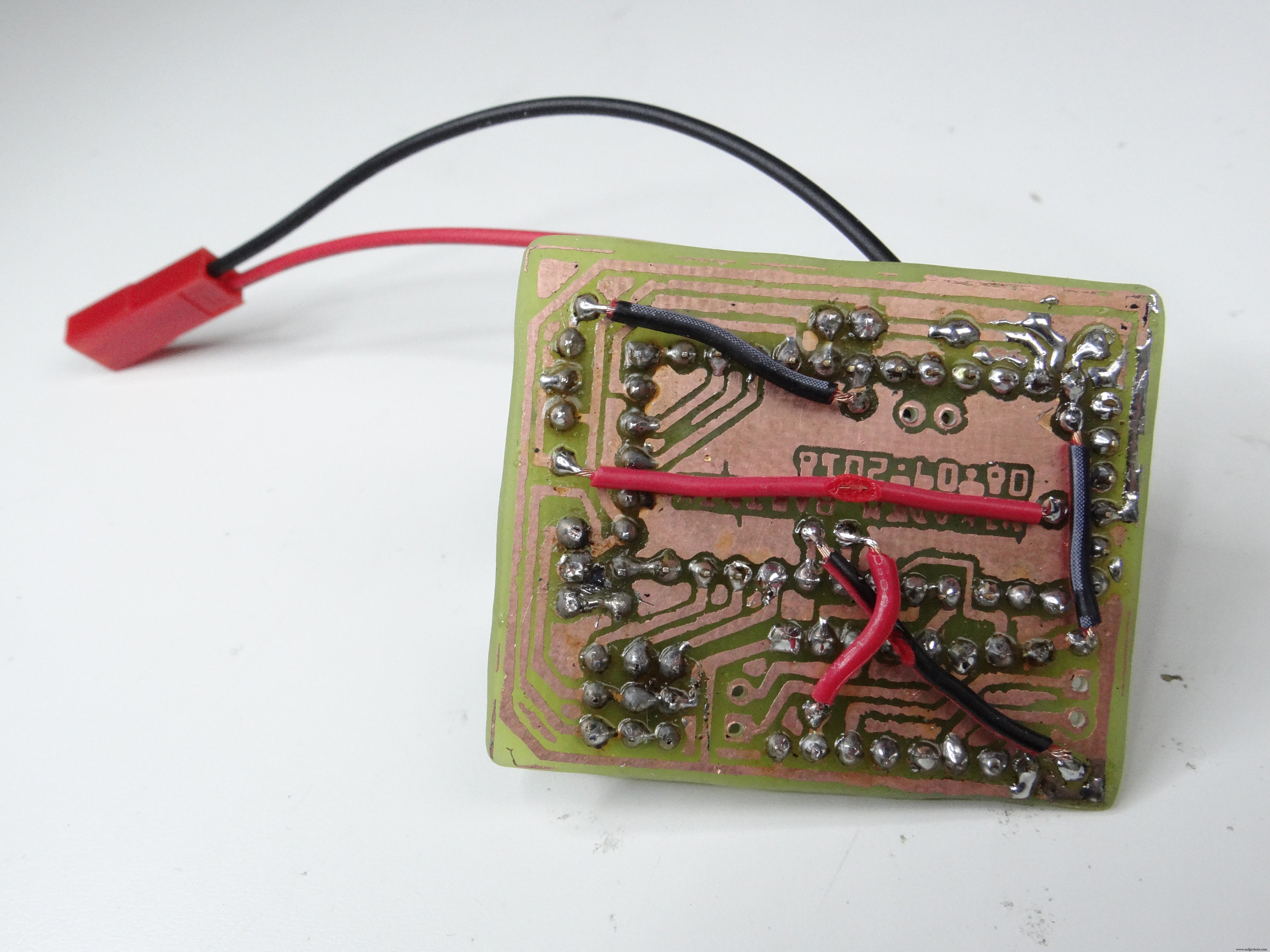
처음에는 CNC 밀링 머신에서 PCB를 밀링하고 싶었지만 토너 전송이라는 익숙한 방법을 사용하기로 결정했습니다. 위에서 구리판에 토너가 전사된 것을 볼 수 있습니다. 그런 다음 PCB를 에칭하고 토너를 청소했습니다. 또한 내부에 THC(Through Hole Components)를 삽입하기 위해 구멍을 뚫어야 합니다.
DIY PCB는 솔더링이 엄청나게 쉬웠는데, 보통 솔더 마스크*가 없기 때문에 솔더링이 훨씬 어렵습니다.
PCB 바닥에 5개의 점퍼 와이어가 있습니다(Fritzing의 PCB 보기에서는 파란색 케이블로 표시됨). 저는 점퍼 사용을 정말 좋아하지 않지만 더 복잡한 회로와 단일 레이어 PCB를 사용하면 이를 피할 방법이 없습니다. .
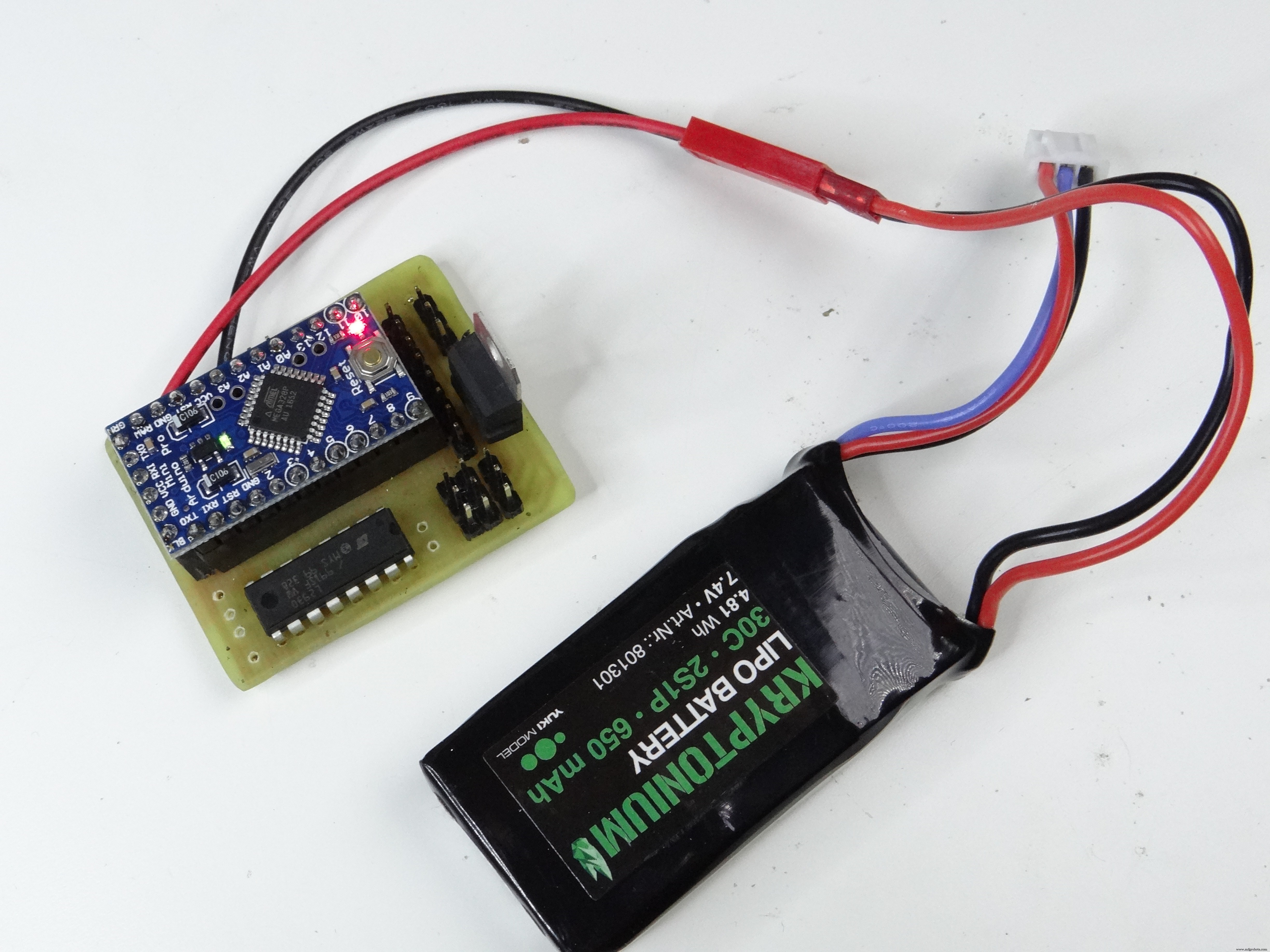
이 로봇에 전원을 공급하기 위해 말했듯이 2셀 LiPo 배터리를 사용합니다. 비슷한 전압의 다른 배터리를 사용할 수 있습니다. 배터리의 특정 용량을 사용할 필요가 없습니다(용량이 클수록 로봇이 더 오래 작동합니다. 단일 충전). 또한 배터리를 쉽게 연결할 수 있도록 소켓을 PCB에 납땜했습니다.

모든 것이 납땜되면 배터리를 연결하여 작동하는지 테스트할 차례입니다. Arduino LED가 켜져야 하고 연기가 없어야 합니다 :)
모든 것이 제대로 작동하면 PCB로 마지막 납땜 작업을 수행할 수 있습니다. 나중에 모터에 납땜할 케이블을 납땜해야 합니다. 필요한 것보다 조금 더 길게 만들고 나중에 자르는 것이 좋습니다. 너무 짧지 않게 하는 것이 좋습니다.
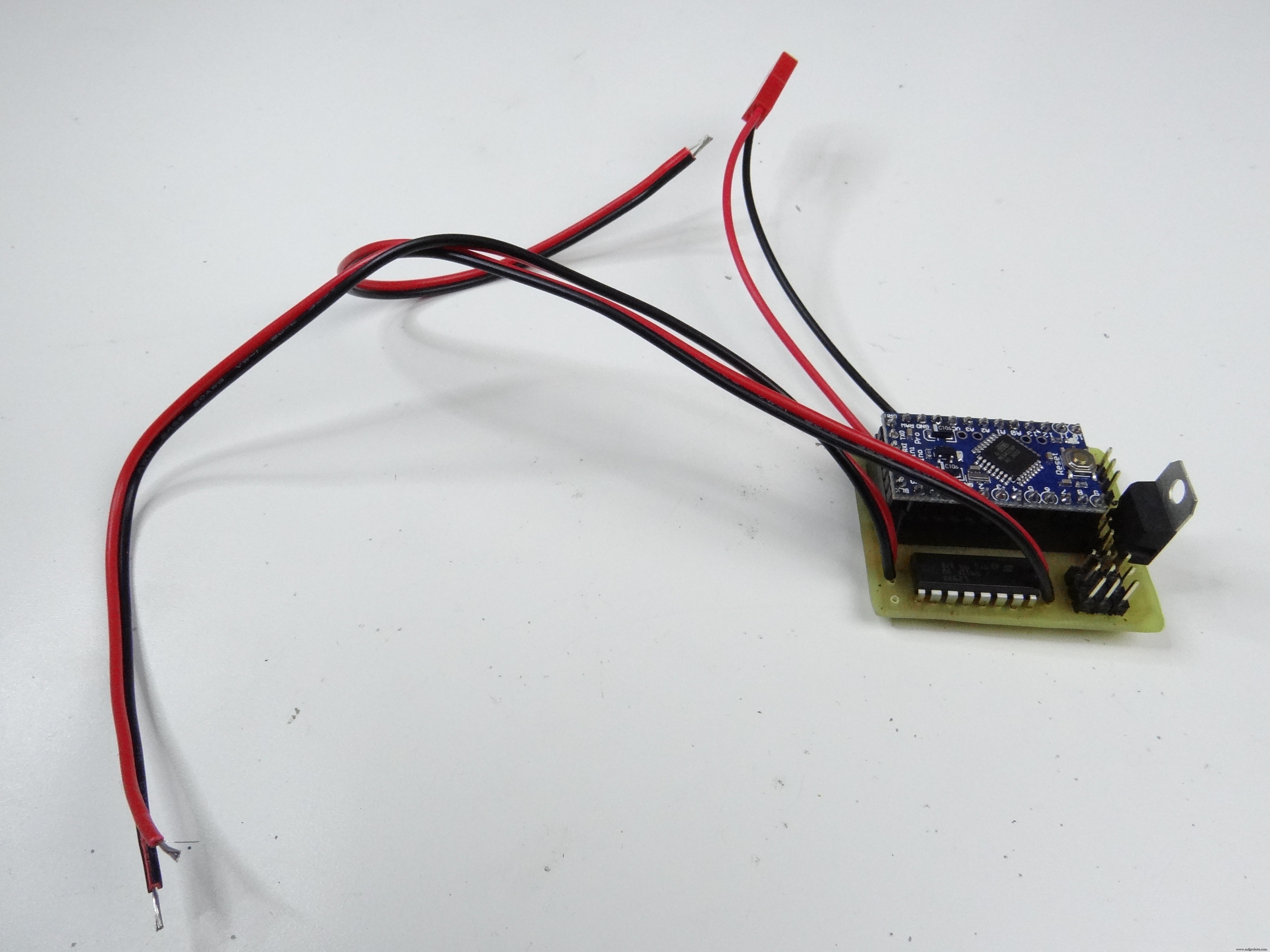
PCB가 준비되었습니다! PCB 제작 경험이 없으시다면 한번 해보세요. 그리 어렵지 않습니다. 케이블이나 프로토보드로 연결하는 것을 선호한다면 자유롭게 하셔도 되지만 로봇의 앞부분에 맞추는 것이 어려울 수 있습니다. PCB를 사용하면 쉽게 할 수 있습니다! 여전히 모든 센서를 PCB에 연결해야 하지만 먼저 섀시를 조립하고 모든 센서를 여기에 부착합니다.
조립
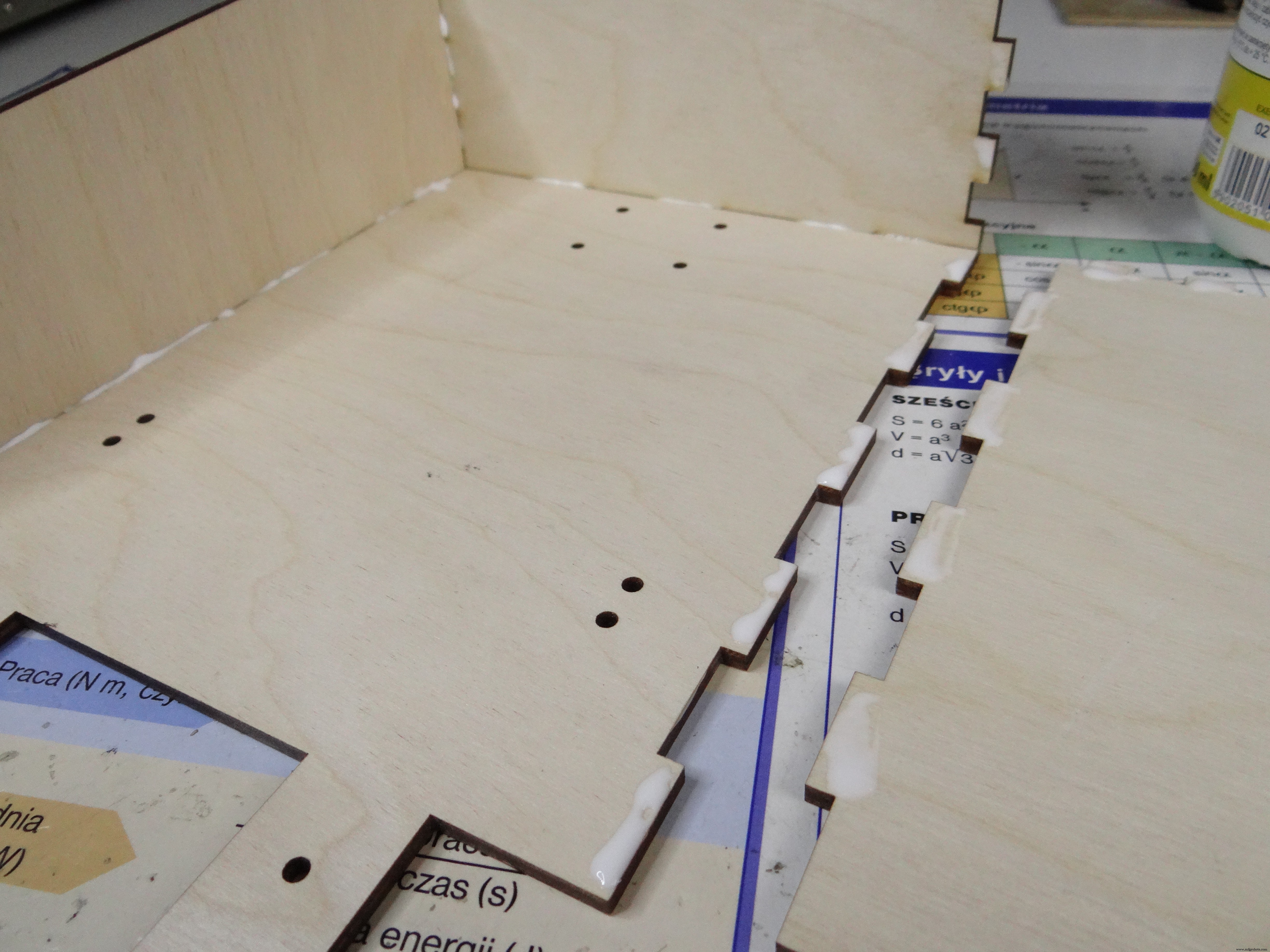
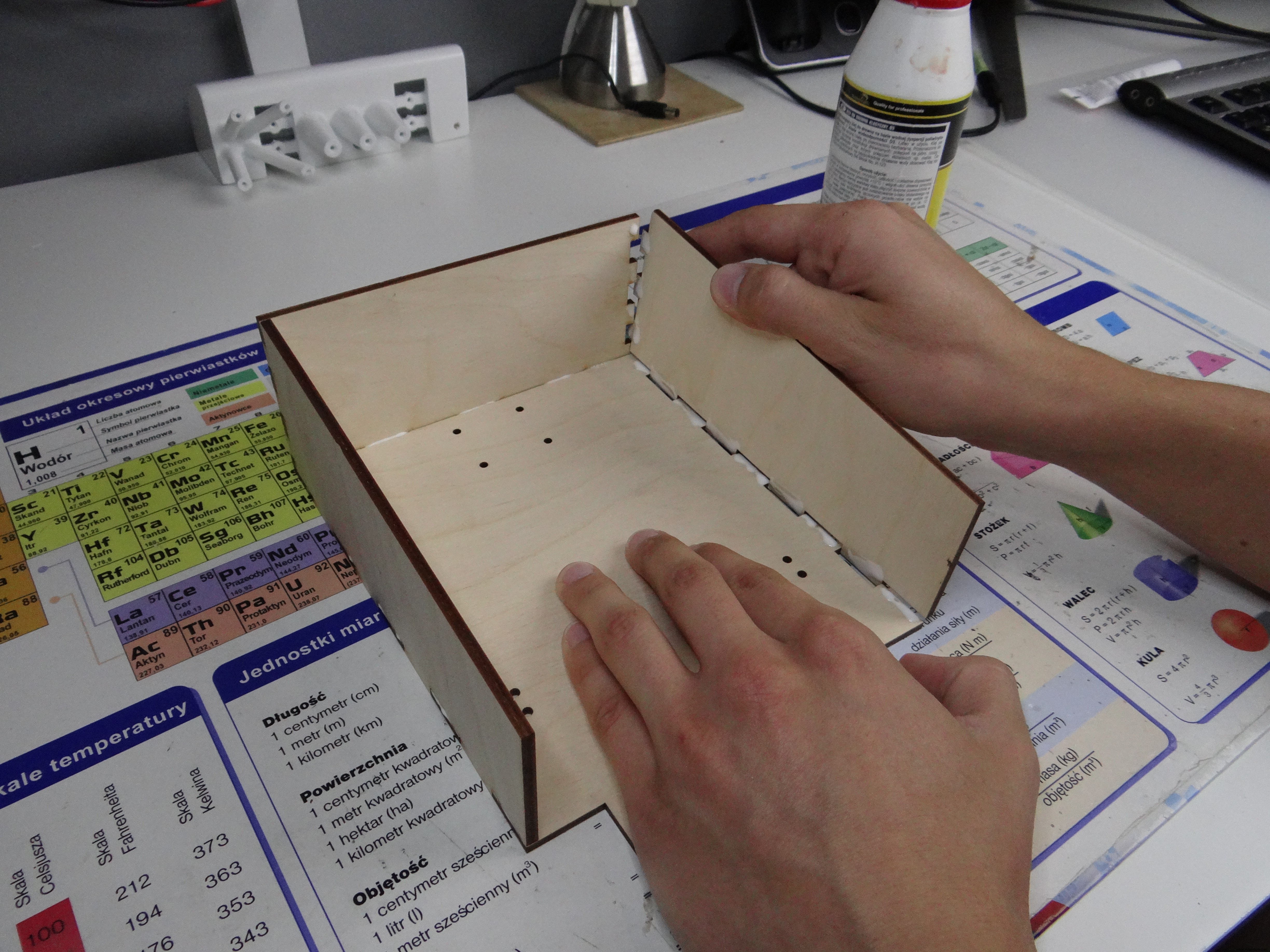
레이저 절단 부품의 핑거 조인트는 서로 완벽하게 맞지만 실제로 단단하고 내구성이 있도록 하려면 접착제를 사용해야 합니다. 그것은 합판이므로 어떤 나무 접착제도 할 수 있습니다. 접착제를 너무 많이 사용하지 않도록 하고 누출이 있는 경우 청소하십시오. 우리가 휴식을 취할 수 있도록 몇 시간 동안 건조해야 합니다. 모든 부품이 제대로 배치되었는지 확인하십시오. 접착제가 마르면 변경할 방법이 없습니다.

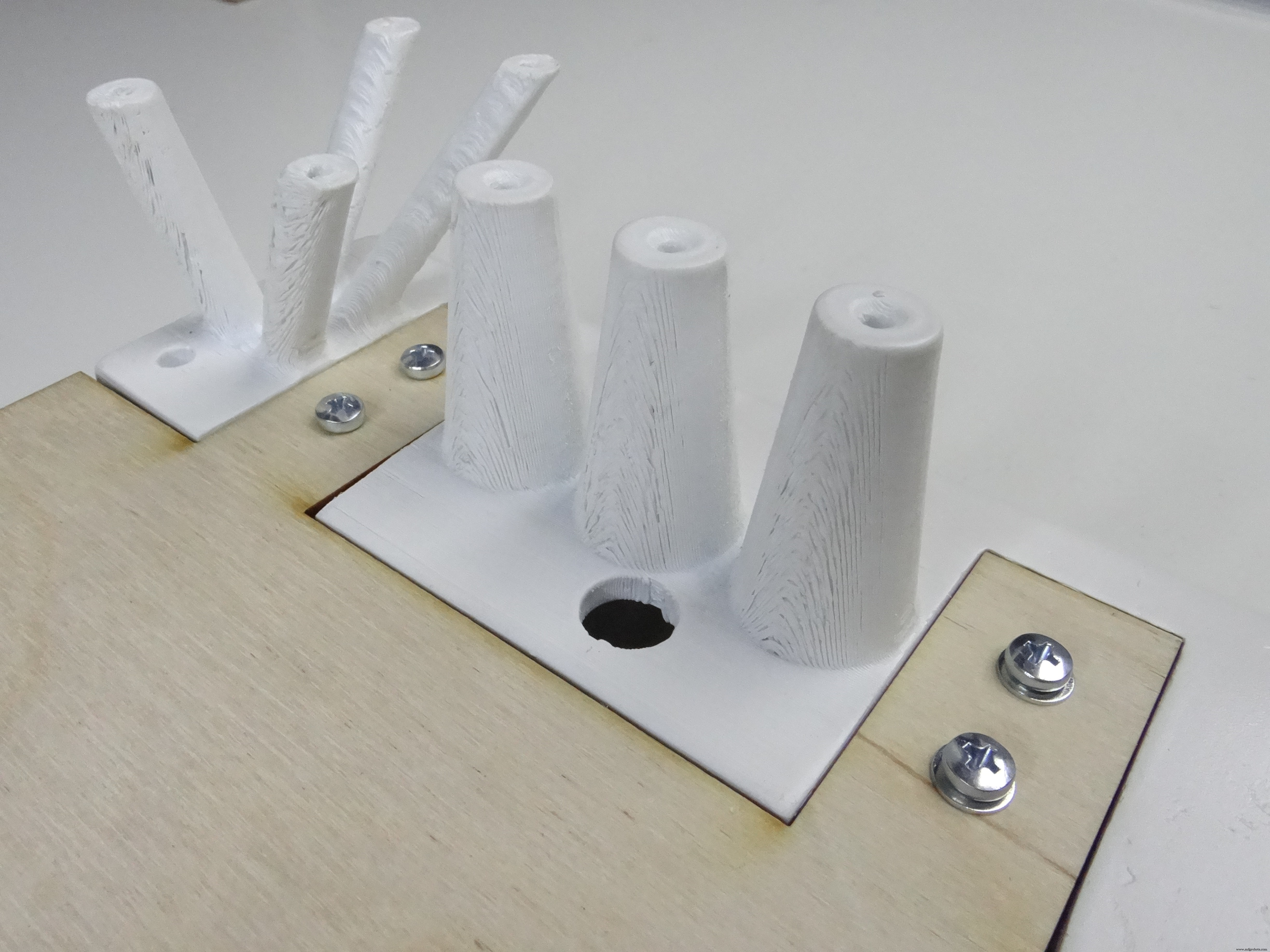
몇 시간 후에 로봇 조립을 계속할 수 있습니다. 3D 프린팅한 앞부분을 합판에 붙일 차례입니다. 그들이 내 CIT 인턴쉽 동안 가르쳐 주었기 때문에 우리는 그것을 위해 접착제를 사용하지 않을 것입니다. 접착제를 사용하는 것은 비전문적입니다. 잊어버리십시오(하지만 나무에서는 괜찮기를 바랍니다). 로봇 바닥에서 배치된 나사를 사용하여 3D 인쇄 부품 내부의 회로에 단락이 발생하지 않도록 나사가 짧은지(예:길이 6mm) 확인합니다. 이런식으로 앞부분을 합판에 붙이는게 좋은점은 위에서 안보고 로봇밑을 봐야해서 훨씬더 잘보입니다 :) 변형에서 합판.

그것이 지금까지 보여야 하는 방식이고, 너무 깨끗하고 완벽해야 합니다!

이제 섀시에 모터와 뒷바퀴를 장착합니다. 이를 위해서는 M3 나사가 필요합니다. 여기에서도 합판을 보호하기 위해 와셔를 사용했습니다.

이제 센서로 돌아가서 로봇을 뒤집어 M3 나사와 드라이버를 잡습니다.
조립 완료! 전혀 힘들지 않았고 순수한 즐거움이었습니다. 이제 모든 센서와 모터가 제자리에 있는 로봇의 모양을 볼 수 있습니다. 거의 마무리 단계에 있지만 최종 테스트 전에 모든 센서를 PCB에 연결해야 합니다.
연결
이 단계는 시간이 걸릴 수 있습니다. 어렵지는 않지만 모든 케이블을 3D 인쇄된 전면 부분의 작은 공간에 넣는 것은 정말 까다롭습니다. 가장 좋은 방법은 모든 센서와 모듈에 케이블을 연결하고 전면의 구멍에 넣은 다음 끝에서 PCB에 연결하는 것입니다.
이 프로젝트의 모든 전자 제품을 3D 인쇄된 부품의 왼쪽에 놓고 싶었지만 불행히도 배터리가 광고보다 조금 더 큰 것으로 밝혀져 왼쪽에 배터리를 놓고 전자 장치를 켜야 했습니다. 우편. 하지만 그것은 큰 문제가 아니었고 모든 것이 완벽하게 들어맞았습니다.
또한 초음파 센서를 제자리에 두는 것을 잊지 마십시오.
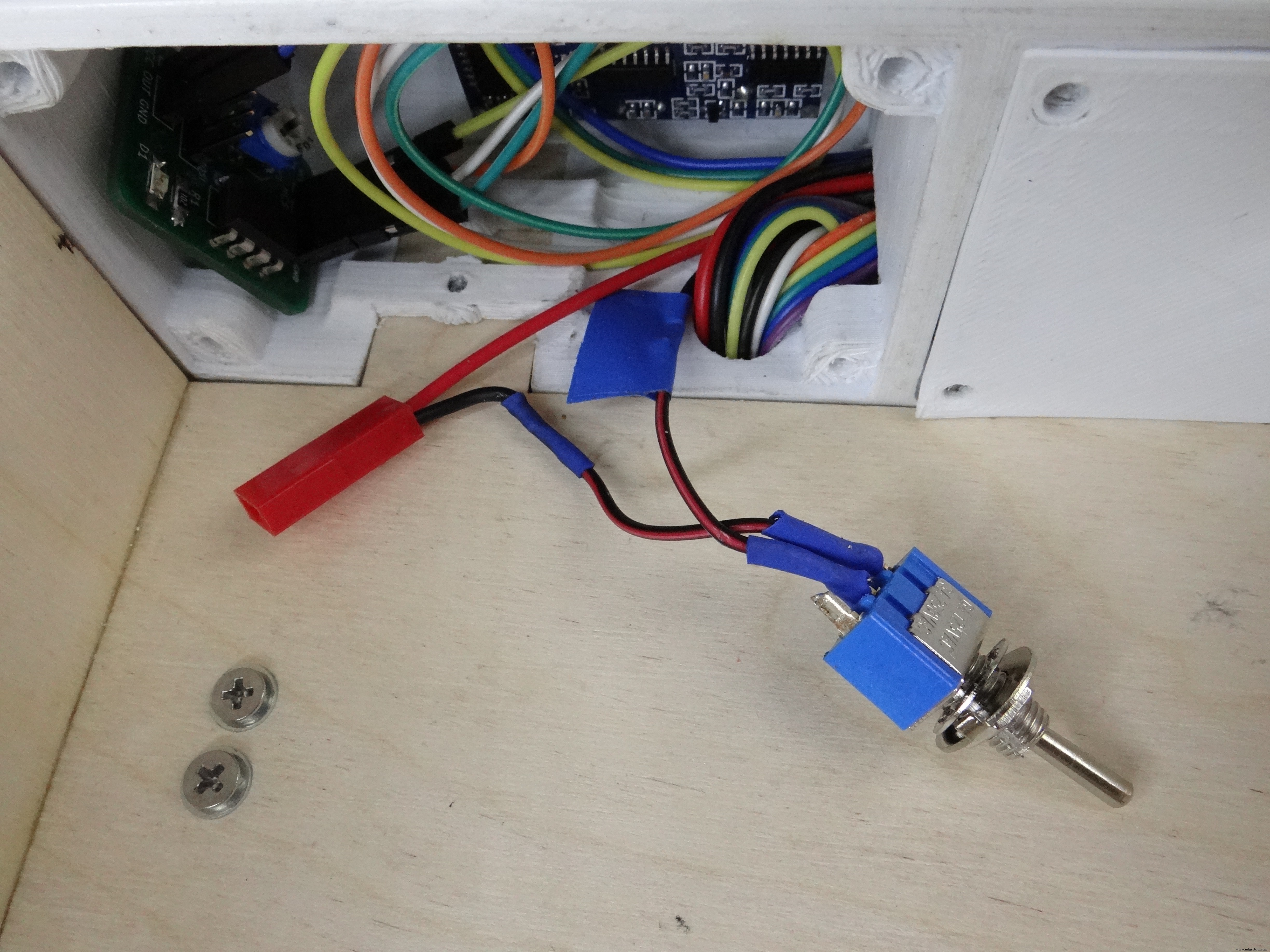
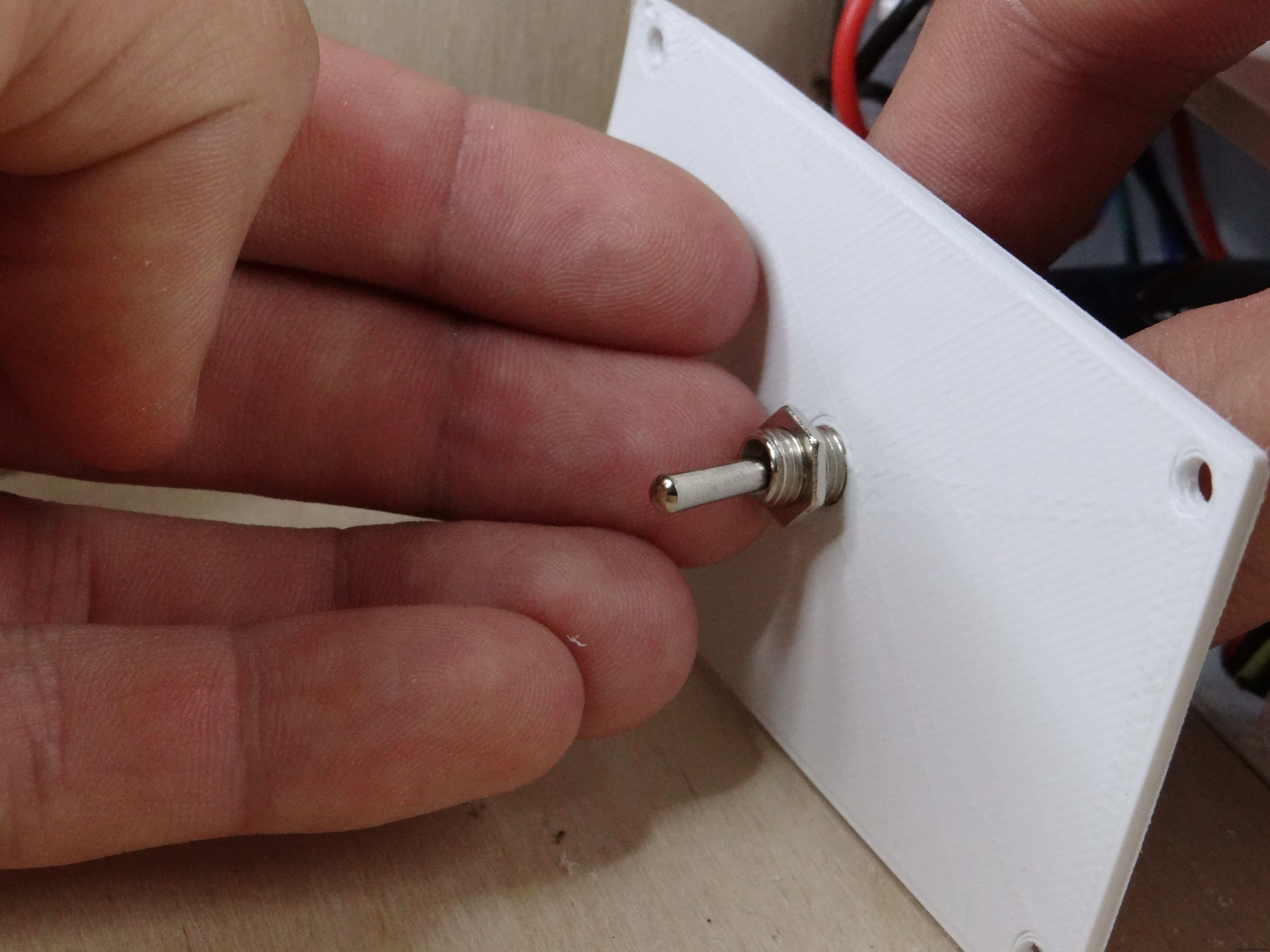
로봇을 쉽게 켜고 끌 수 있도록 배터리 커넥터에 이렇게 스위치를 추가했습니다. 후면 패널에는 내부에 스위치를 넣을 수 있는 구멍도 있습니다.
코드
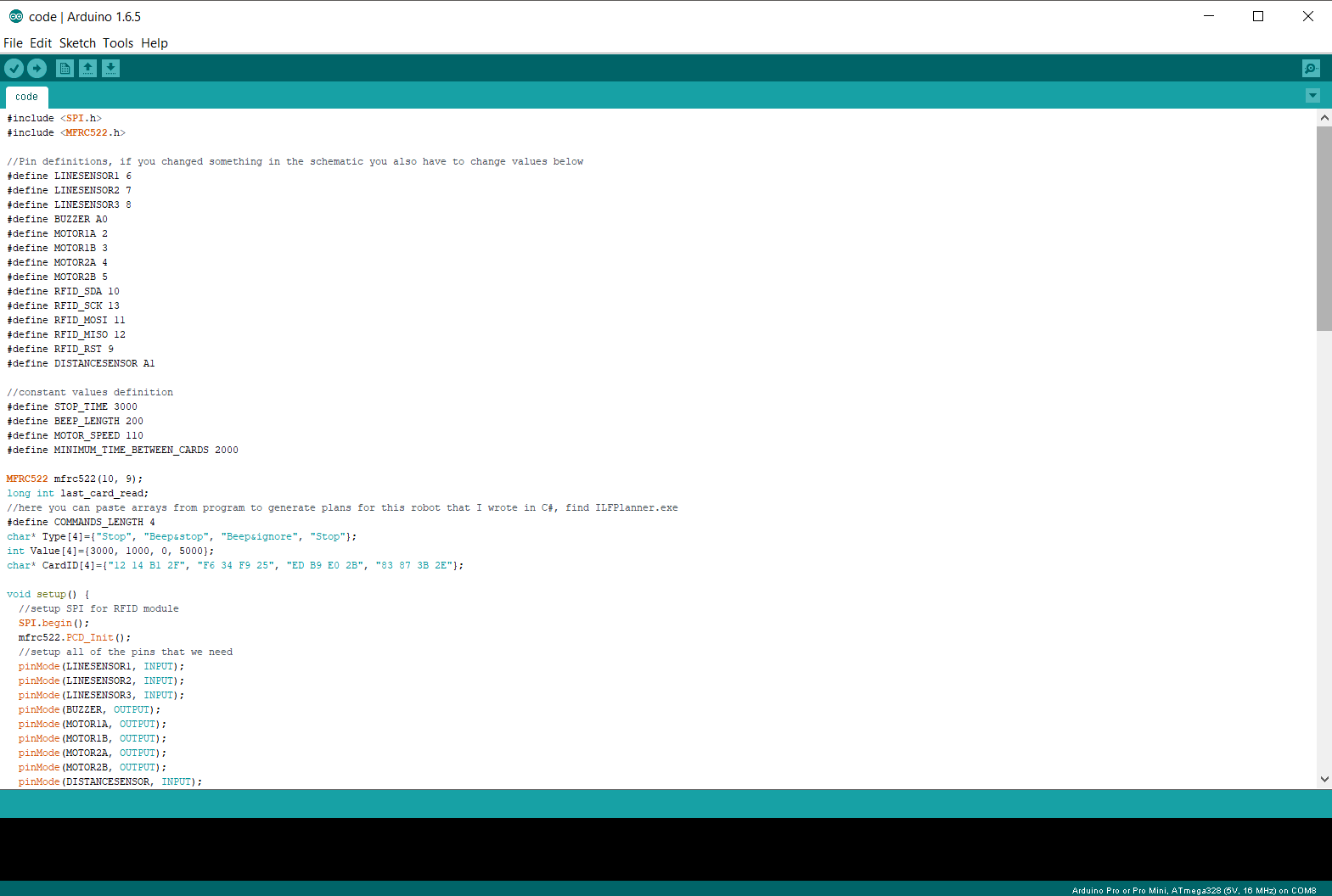
앞 부분의 뒷면을 닫기 전에 Arduino pro mini에 코드를 업로드해야 합니다. PCB에서 Arduino를 꺼내 USB-UART 변환기를 사용하여 컴퓨터에 연결해야 합니다. Arduino용 코드는 아래에서 찾을 수 있습니다. 코드에 대한 모든 것은 댓글과 비디오에 설명되어 있습니다. 코드는 웹 편집기에서도 찾을 수 있습니다.
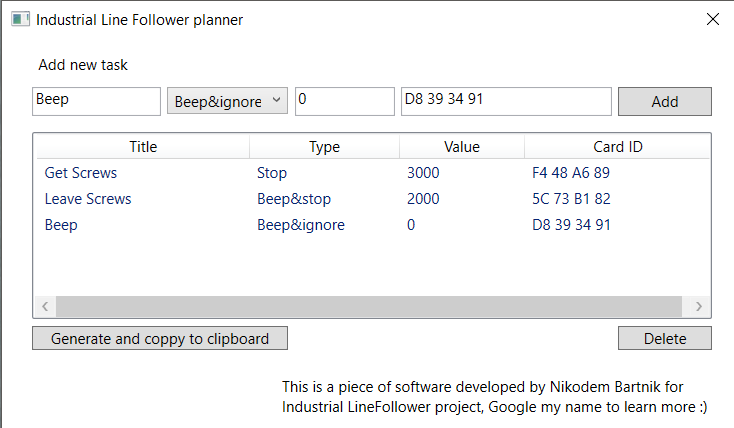
이 로봇에 대한 작업을 생성하기 위해 내가 C#으로 작성한 특수 프로그램도 있습니다. 작업 플래너(아래에서 find.exe 파일을 찾을 수 있음)라고 합니다. 로봇을 위한 작업을 쉽게 생성하고 복사하여 Arduino에 업로드하기 전에 Arduino IDE에 붙여넣을 수 있습니다. 로봇에 대한 작업을 생성하려면 RFID 카드의 ID를 알아야 하며, 이를 얻으려면 여기에서 간단한 회로를 구축할 수 있습니다.
거의 완료...

이제 두 개의 플랩으로 앞 부분의 뒷면을 닫고 나사로 조일 수 있습니다. 모든 구성 요소를 내부에 맞추는 것은 까다로울 수 있습니다. 다시 정렬하고 덮개를 닫을 수 있도록 다른 위치에 넣으십시오.


나사를 조이기 위해 짧은 M3 나사를 사용할 수 있으며 와셔가 필요하지 않습니다. 그것이 우리가 해야 할 마지막 일입니다. 우리 로봇이 드디어 최종 테스트를 할 준비가 되었습니다! 구축하는 데 너무 많은 시간을 할애했습니다. 이제 의도한 대로 작동하는지 확인할 수 있어 정말 기쁩니다. :)

모든 구성 요소가 제자리에 있고 전면에 숨겨진 전자 장치와 로봇에 장착된 센서가 있는 모습입니다. 유일한 단점은 배터리를 빼기 위해 후면 덮개를 열어야 하기 때문에 배터리 충전이 어려울 수 있다는 것입니다. 이에 대한 간단한 해결책은 3D 부품에 구멍을 만들고 이 구멍을 통해 배터리의 밸런서 케이블을 빼내는 것입니다.

기말 고사!
이 로봇이 어떻게 작동하는지 어떻게 보여줘야 할지, 아니면 제대로 하는 방법을 말해야 할지 잘 모르겠습니다. 이 프로젝트의 주요 목적은 조립 라인과 공장 주변에서 물건을 스마트하게 운반할 수 있는 저렴한 오픈 소스 로봇을 만드는 것이므로 간단한 조립 라인을 설정하고 아버지와 남동생의 아들에게 도움을 요청했습니다. 우리의 목표는 로봇에 항목을 넣고 다른 스테이션의 로봇에서 그것을 잡고 이미 스티커가 붙은 것을 놓고 마지막 스테이션에서 스티커가 있는 항목을 창고로 옮기는 것이었습니다. 조립 라인을 모방하고 작동 방식을 쉽게 테스트할 수 있는 간단한 작업입니다.
바닥에 검은색 테이프를 붙이고 싶었지만 센서에 반사가 잘 되지 않아 판지를 사용했습니다. 그리고 우리는 테스트를 시작했고 비디오에서 볼 수 있습니다(이 프로젝트의 시작 부분에서 찾을 수 있음).

이 프로젝트에서 잘못될 수 있는 많은 일들이 있었지만 모든 것이 완벽하게 밝혀졌습니다. 의도한 대로 작동합니다. 모든 단계, 설계 및 조립을 통한 초기 아이디어가 매끄럽고 믿을 수 없을 정도로 좋았습니다. 잘못될 수 있는 일이 많다고 말했을 때 나는 정말로 그것을 의미했습니다. 저는 3D 프린팅, 프로그래밍 및 Arduino에 대한 많은 경험이 있지만 종이에 프로젝트를 그린 것은 이번이 처음이었습니다. 좋은 아이디어였고 앞으로도 자주 할 것입니다. 전에는 레이저 절단을 위한 어떤 것도 디자인한 적이 없습니다. C# 프로그래머 자격증을 가지고 있더라도 나는 그 자격증의 주인이 아닙니다. 그리고 저는 이 모든 것을 연결하여 멋진 로봇을 만들었습니다. :) 제 프로젝트가 마음에 드셨기를 바랍니다. 그렇다면 댓글에 그에 대한 몇 마디도 잊지 마세요. 어떻게 생각하시는지 정말 궁금합니다. 질문이 있으시면 언제든지 문의하세요! 읽어주셔서 감사합니다.
즐거운 시간 보내세요!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">미리보기 없음(다운로드만 가능).
미리보기 없음(다운로드만 가능).
 이 프로젝트에서 PCB를 만들 때 필요한 PDF 파일입니다. 단면이기 때문에 최상위 레이어가 아닙니다.
이 프로젝트에서 PCB를 만들 때 필요한 PDF 파일입니다. 단면이기 때문에 최상위 레이어가 아닙니다.제조공정
최근 몇 년 동안 CNC 가공의 발전과 함께 CNC 공작 기계 부품도 계속 개발되었습니다. CNC 가공은 많은 분야에서 필수품이 되었으며 이러한 분야에서는 프로젝트를 위한 특수 부품을 제조해야 합니다. CNC 재료는 소비자, 엔지니어, 계약자 및 기타 분야의 요구 사항을 충족하도록 확장되어 매우 특정한 응용 프로그램을 위한 솔루션을 만들었습니다. 최고의 완제품을 만드는 열쇠는 올바른 재료를 선택하는 것입니다. 다양한 재료를 선택할 수 있으며 재료는 완전히 다른 용도로 다양한 부품에 사용할 수 있습니다. 재료가 매우 다양하기 때문에
산업용 로봇을 프로그래밍하고 싶지만 시작하는 가장 좋은 방법은 무엇입니까? 초보자로서 로봇 프로그래밍은 벅찬 전망이 될 수 있습니다. 프로그래밍은 전통적으로 산업용 로봇을 사용할 때 가장 어려운 측면 중 하나였습니다. 프로그래밍 프로세스를 최대한 쉽게 만들 수 있는 방법은 무엇인가요? 누구나 로봇과 함께 어딘가에서 시작해야 합니다. 우리 모두는 전에 산업용 로봇을 한 번도 사용해 본 적이 없는 시간을 가졌습니다. 산업용 로봇을 처음 접하는 경우 시작하려면 배워야 할 것이 많습니다. 로봇 하드웨어, 엔드 이펙터, 센서에