

제조공정

산업 제조
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
 |
|
 |
|
서보로 이족보행 로봇을 만들 수 있다면 좋지 않을까요? Inner Geek은 그렇게 생각했고 이것이 결과입니다...
바로 Walbi입니다. 기계 학습 프로젝트를 위해 만든 로봇인 WALink BIped입니다. 이 로봇은 결코 땅에서 떨어지지 않습니다(Walbi도 마찬가지지만 두 발이 땅에 단단히 고정되어 있기 때문입니다).
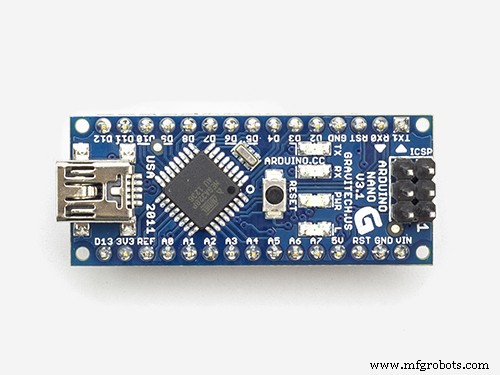
Walbi는 "뇌"에 Arduino Nano, "근육"에 LX-16A 서보, "뼈"에 플라스틱 3D 인쇄 부품을 사용합니다. LewanSoul LX-16A 서보는 가벼우며 19kg.cm 이상 이동할 수 있고 서보에서 서보로 이어지는 단일 케이블로 연결되어 로봇 어린이의 케이블링을 만들기 때문에 소형(ish) 로봇 프로젝트를 위한 꿈의 서보입니다. 재생합니다.
Walbi는 2:1 크기의 휴머노이드이며 다리는 발뒤꿈치에서 허리까지 높이가 55cm(21.7인치)이고 무게는 1.1Kg(2.4파운드)입니다. 몸체의 흰색 부분은 3d 프린팅으로 제작되었지만 가볍고 튼튼한 나무로 쉽게 만들 수 있었습니다.
Walbi 프로그래밍은 매우 간단합니다. 모션 캡처 및 재생에 필요한 두 가지 프로그램을 아래에서 다운로드하면 Walbi가 걷고, 기어 다니고, 오르고, 점프하거나 춤을 출 수 있습니다! 다리를 원하는 포즈로 이동하고, 해당 포즈를 기록하고, 왈비를 다른 포즈로 모양을 만들고, 기록하는 등의 작업만 하면 됩니다. 그런 다음 전체 시퀀스를 기록하면 편안히 앉아 능숙하게 수행하는 것을 볼 수 있습니다. 당신이 가르쳐준 동작.
당신에게 리버댄스를 가르칠 수도 있습니다 😀
왈비 구축
Walbi는 FlashForge Creator Pro 프린터를 사용하여 PLA 플라스틱으로 3D 인쇄되었습니다. Thingiverse에서 STL 파일을 다운로드하거나 나무 또는 금속을 사용하여 발, 다리 "뼈" 및 허리를 만드는 대체 방법을 사용할 수 있습니다. 서보 지지대는 이러한 부품, 서보 및 서로에 부착됩니다.
서보를 인쇄된 부품에 그리고 서로에 부착하려면 4가지 유형의 금속 지지대가 필요합니다(자세한 정보 및 사진은 Release The Inner Gook 블로그 참조).
배선
LX-16A 서보를 제어하려면 LewanSoul 디버그 보드가 필요합니다.
Arduino Nano의 직렬 포트에서 명령을 수신합니다. 컴퓨터와 통신하기 위해 Arduino의 하드웨어 직렬을 사용하면서 디버그 보드에 연결하기 위해 SoftwareSerial 라이브러리를 사용하여 Nano에 두 번째 직렬 포트를 생성했습니다.
직렬 서보로 배선을 최소화합니다. 각 서보에서 다음 서보로 연결되는 케이블(서보와 함께 제공되는 직렬 케이블)이 있으며 허리에 있는 서보는 디버그 보드에 직접 연결됩니다. 컴퓨터는 Arduino의 USB 포트에 연결되고 Arduino는 SoftwareSerial용으로 구성한 Arduino 핀에 연결된 3개의 점퍼 와이어(TX, RX 및 GND)를 사용하여 디버그 보드에 연결됩니다. 우리는 코드1에서 핀 10과 1을 사용했습니다. .
서보는 115200의 전송 속도를 사용합니다(변경 방법을 알고 있다면 너무 높기 때문에 알려주십시오). 이 전송 속도는 SoftwareSerial에서 높기 때문에 오류 검사 및 재시도 기능을 구현해야 했습니다. 어떤 경우에는 정확한 판독을 위해 끈기가 필요했습니다.
힘
서보는 7.4v에서 19.5kg.cm를 제공할 수 있습니다. 우리는 6v를 사용했고 실속 전류는 3암페어 미만이었습니다.
프로그래밍
프로젝트 Github 저장소에서 Arduino 코드를 얻을 수 있습니다.
영화에서 사용되는 것과 유사한 기술인 모션 캡처 및 재생에 두 가지 프로그램이 사용됩니다. 로봇을 포즈로 만드는 것으로 시작합니다. 서보는 기본적으로 모터가 꺼져 있으므로 손으로 서보를 회전시킬 수 있습니다. 로봇이 원하는 포즈를 취하면 Walbi_record 프로그램을 사용하여 모든 서보 각도를 읽고 표시합니다. 그런 다음 해당 각도 판독값을 Walbi_play의 poseAngles 변수에 입력하고 프로그램을 사용하여 timeToMove 변수(밀리초 단위)를 사용하여 설정한 속도로 기록된 포즈 시퀀스를 재생합니다.
프로젝트가 즐거웠기를 바랍니다. 댓글을 남기거나 블로그를 구독하거나 다른 유형의 피드백 작업을 통해 자유롭게 사랑을 공유하세요. 감사합니다!
내부 괴짜 너겟
다음은 Walbi를 만드는 동안 배운 몇 가지 팁과 요령입니다.
<울>제조공정
제조 리쇼어링에 대한 주제는 엔지니어링 생산이 역외 회사에 하도급된 이후로 영국 산업 전반에 걸쳐 논쟁의 대상이었습니다. 지금까지 제조업 부문은 이러한 상황을 견뎌왔으며 영국은 지구상에서 9번째로 큰 제조업 국가입니다. 그러나 COVID-19 바이러스의 출현으로 우리가 비즈니스를 수행하는 방식의 많은 측면이 변경되었습니다. 오늘날 많은 영국 기업들은 필수 제품의 생산을 영국으로 되돌리기 위한 전국적인 리쇼어링 노력을 촉구하고 있습니다. 주요 전염병에도 불구하고 영국 기업들이 생산을 본국으로 다시 가져갈 계획인 데에는 충분한 이유
제조는 우리의 세계가 중요하게 생각하는 것입니다. 2018년 기준으로 제조업은 세계 GDP의 거의 16%를 차지했습니다. 불행히도 제조 산업은 SARS-CoV-2에 의해 유발된 바이러스에 주어진 이름인 COVID-19의 대유행 동안 타격을 입었습니다. 많은 제조 공장이 문을 닫아야 했고 다시 문을 열기 시작했습니다. 일부는 감소된 제조 근로자와 직원 또는 공급망의 심각한 혼란으로 인해 어려움을 겪었습니다. 다른 사람들은 제품에 대한 수요 증가에 직면해 있습니다. COVID-19로 인해 제조 회사가 직면한 문제가 무엇이든, 이를