

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 2 |
 |
|
| |
|
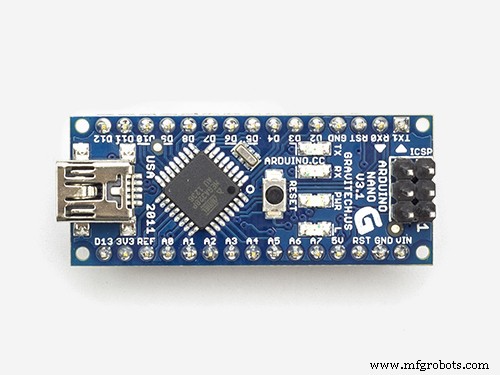
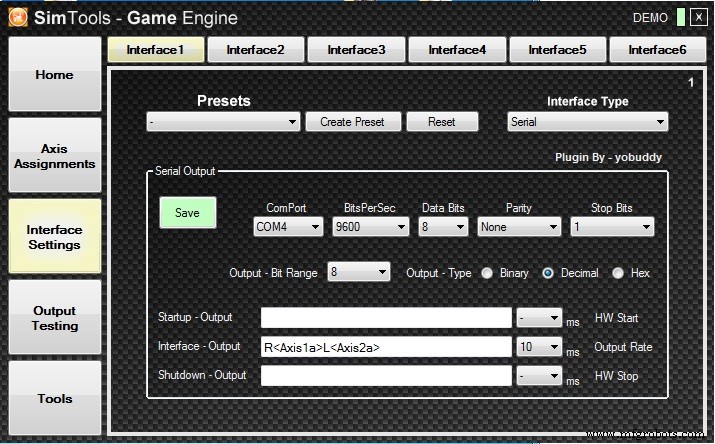
SimTools는 Arduino를 포함한 여러 하드웨어 인터페이스를 제어할 수 있는 일반 모션 시뮬레이터 소프트웨어입니다. 이 조합은 비디오에 제시된 프로젝트에서 사용됩니다. 하드웨어 부분은 Arduino Nano 마이크로 컨트롤러와 2개의 저렴한 SG90 마이크로 서보 모터로만 구성됩니다. 아래에 제공된 코드만 업로드하면 됩니다.
SimTools 소프트웨어의 도움으로 필요한 게임 데이터는 직렬 포트를 통해 Arduino로 전송됩니다. 다음으로 Arduino는 그에 따라 시뮬레이션 플랫폼을 움직이는 서보 모터를 활성화합니다. 이것은 2축 시뮬레이터의 소규모입니다. 실제 시뮬레이터를 만들기 위해서는 모터 드라이버와 대형 서보 모터를 추가해야 합니다.

"https://www.xsimulator.net/" 페이지에는 이러한 DIY 시뮬레이터의 예와 건설 도면 및 팁이 많이 있습니다. SimTools 설정 절차는 비디오에 설명되어 있지만 https://simtools.us/wp-content/uploads/2019/06/SimToolsUserManual-v2.4.pdf
에서 PDF 사용자 설명서를 다운로드할 수도 있습니다.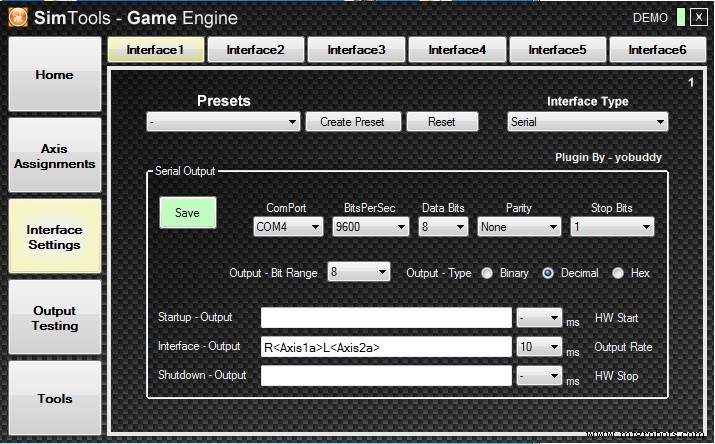
SimTools는 유효한 라이센스가 등록될 때까지 "데모" 모드에서 실행됩니다. Live for Speed용 플러그인은 SimTools가 데모 모드에 있는 동안 테스트를 위해 완전히 작동합니다. (Live for Speed의 데모는 SimTools 테스트에도 작동합니다.) https://www.lfs.net/downloads
에서 자세한 정보를 찾고 Live for Speed를 다운로드할 수 있습니다.SimTools 다운로드 링크:
https://www.xsimulator.net/community/marketplace/motion-simulation-software-simtools.63/
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">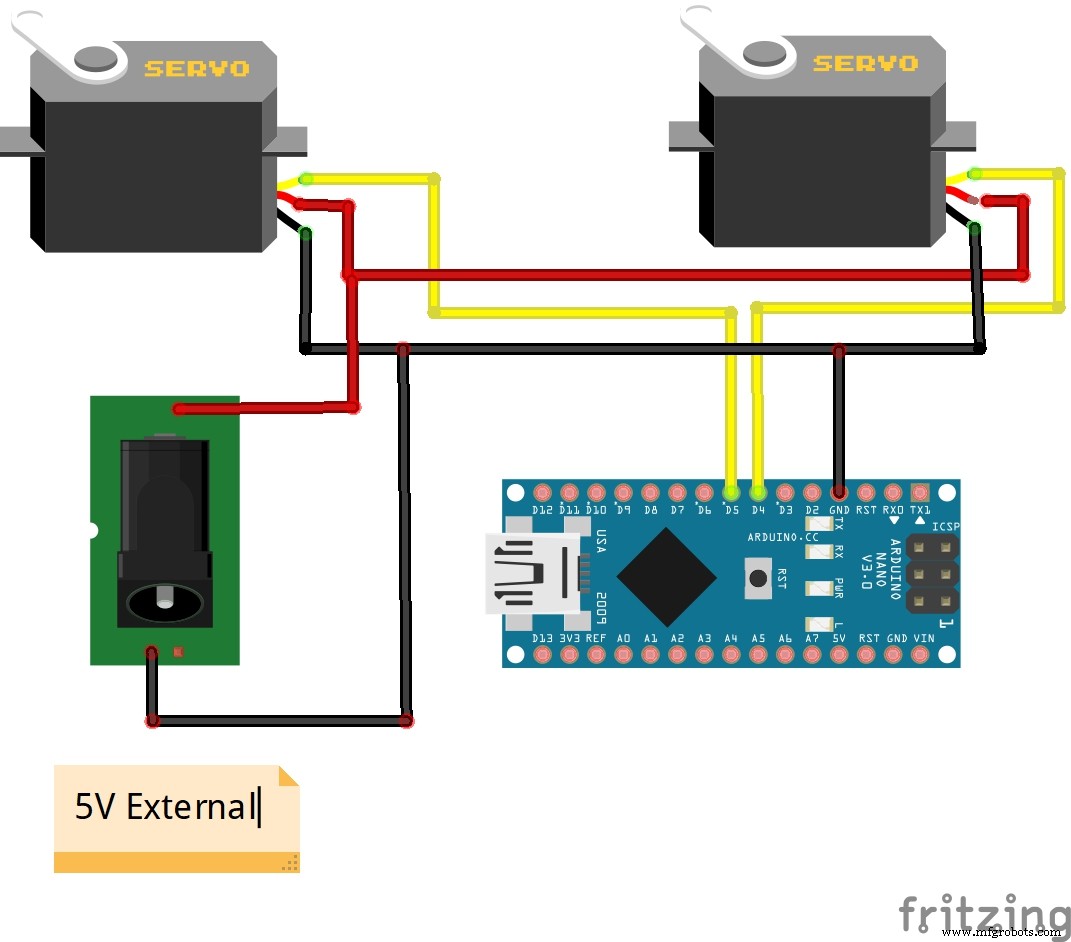
제조공정
튜토리얼에서 우리는 DIY Arduino RC 송신기를 만드는 방법을 배울 것입니다. 종종 내가 만드는 프로젝트에 무선 제어가 필요하므로 거의 모든 작업에 사용할 수 있는 이 다기능 라디오 컨트롤러를 만들었습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 이제 수신기 측에서 약간의 조정만 하면 모든 Arduino 프로젝트를 무선으로 제어할 수 있습니다. 이 송신기는 RC 장난감, 자동차, 드론 등을 제어하기 위한 상업용 RC 송신기로도 사용할 수 있습니다. 이를 위해서는 상용 RC 장치를 제어하기
이 Arduino 프로젝트에서는 Arduino를 사용하여 멋진 LED 하트 액자를 만드는 방법을 보여 드리겠습니다. 자세한 내용은 다음 동영상을 보거나 아래에 작성된 기사를 읽어보세요. 얼핏 보면 평범한 액자처럼 보이지만 뒷면의 스위치를 누르면 색다른 액자로 변신한다. 이 Arduino 프로젝트를 구축하는 것은 매우 재미있으며 사랑하는 사람을 위한 완벽한 발렌타인, 생일 또는 기념일 선물이 될 수 있습니다. 이제 빌드를 시작해 보겠습니다. 포토 프레임 준비 먼저 간단한 18 x 13cm 사진 프레임과 LED를 삽입하기 위