

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
개요
이 프로젝트는 Tinkernut에서 영감을 받았습니다. 의 Arduino 동작 감지 물총:
Tinkernut의 프로젝트를 복제하고 싶었지만 문제는 내가 살고 있는 중국에서 사용할 수 없기 때문에 Raid Auto Trigger를 손에 넣을 수 없다는 것이었습니다. 하지만 Taobao.com에서 빠르게 검색한 결과 다음과 같은 흥미로운 제품을 발견했습니다.

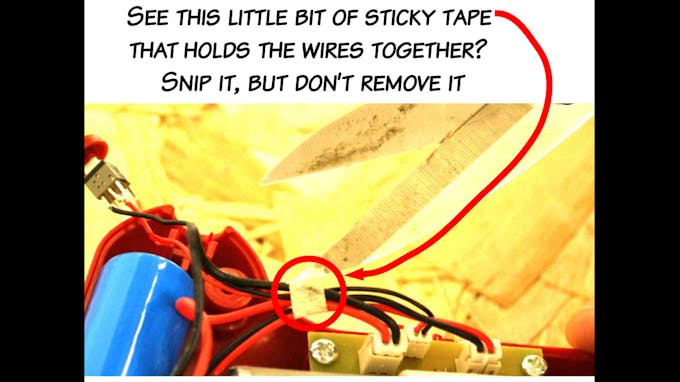
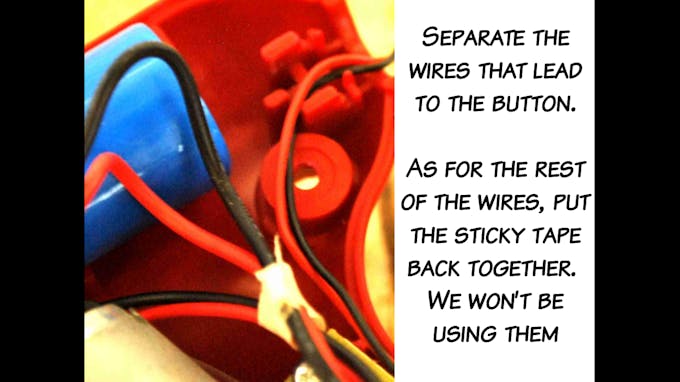
Raid Auto Trigger와 매우 유사하며 78.80엔이라는 합리적인 가격으로 구입하기로 결정했습니다. 내부 구성 요소를 변경할 필요가 없었기 때문에 해킹하기가 훨씬 더 쉬웠습니다. 브레드보드/Arduino와 호환되도록 푸시 버튼만 수정하면 됩니다. 중국에 거주하거나 Taobao가 해당 국가로 배송되는 경우 여기에서 물총을 구입할 수 있습니다.
우리는 이것을 워크샵으로 바꾸었습니다. 따라서 모든 파워포인트 슬라이드와 큰 텍스트입니다.
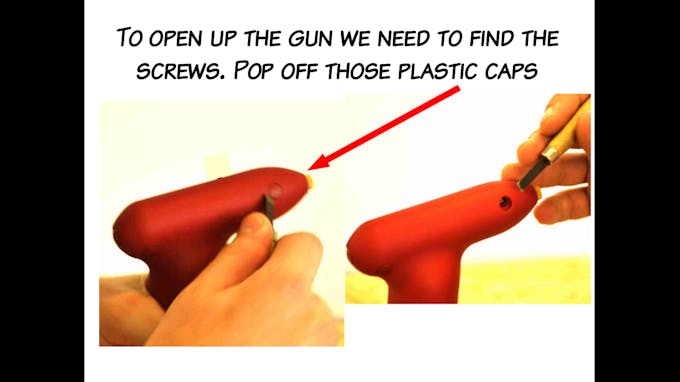
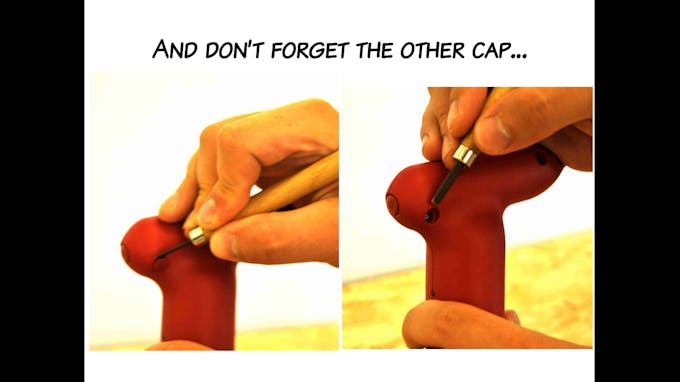
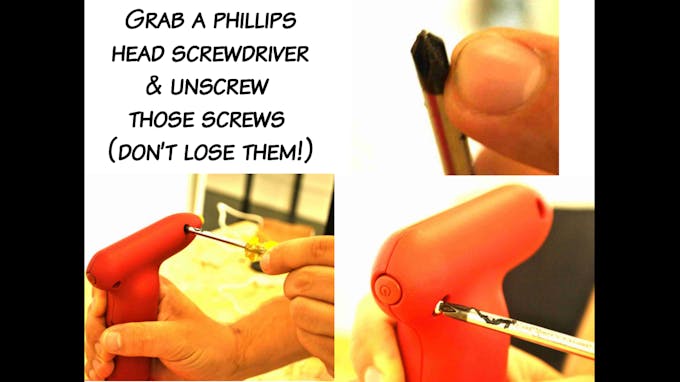
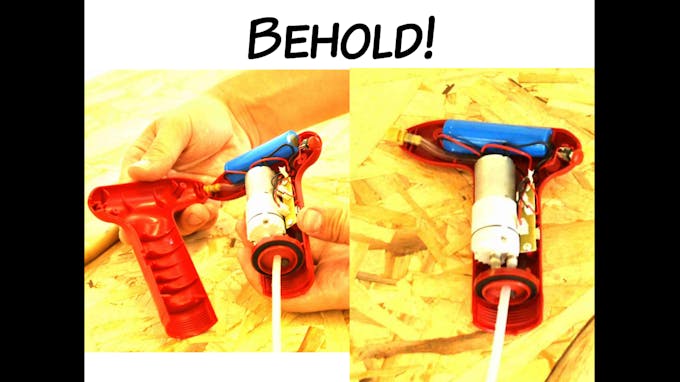
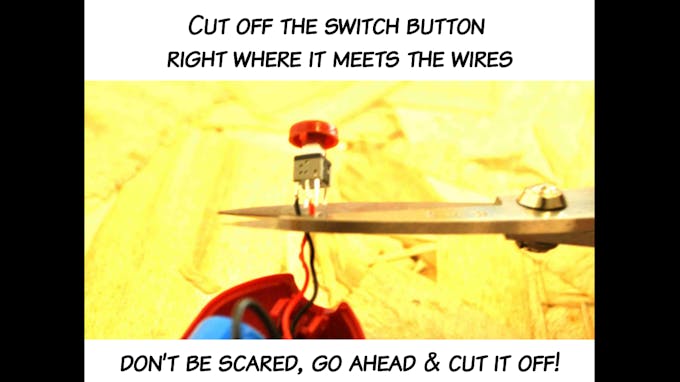
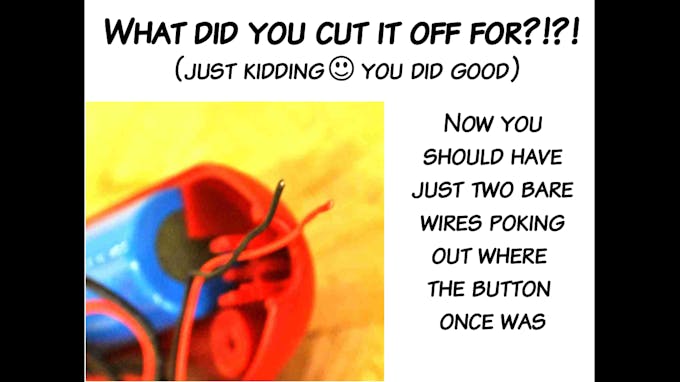
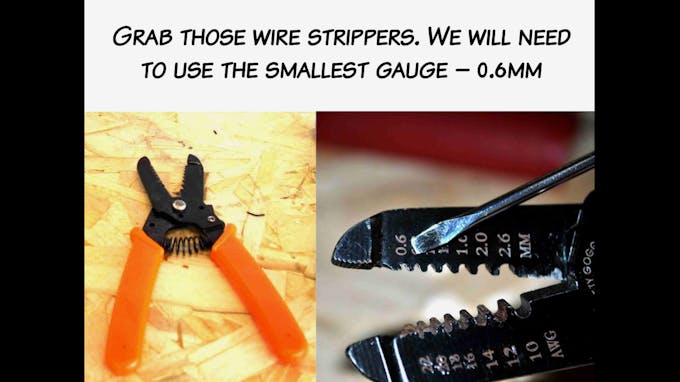
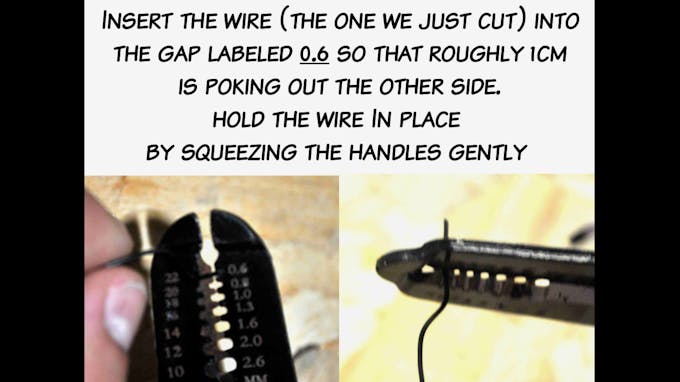
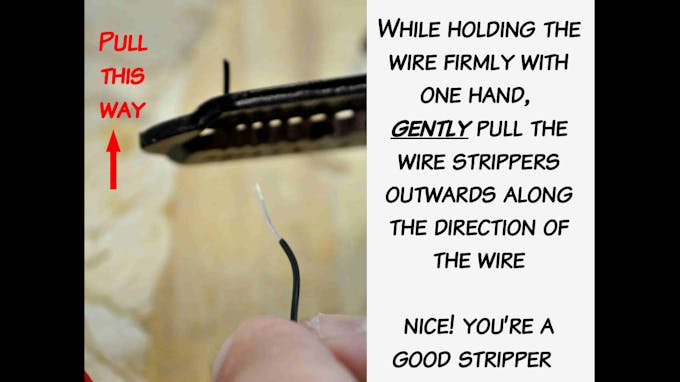
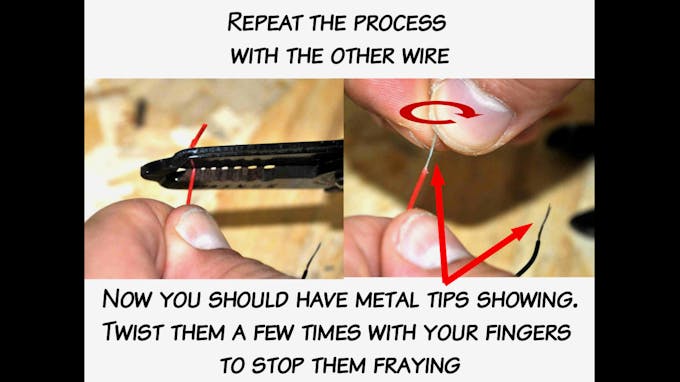
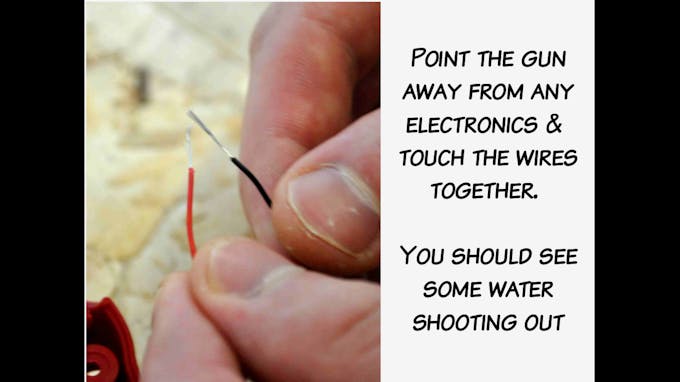
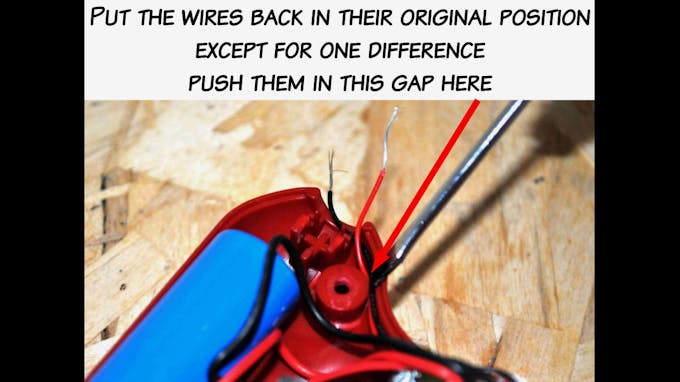
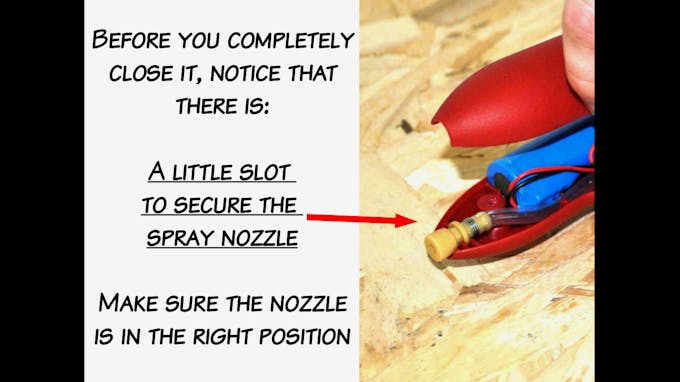
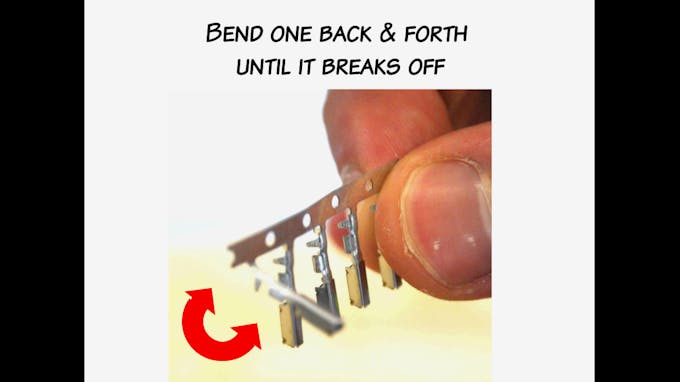
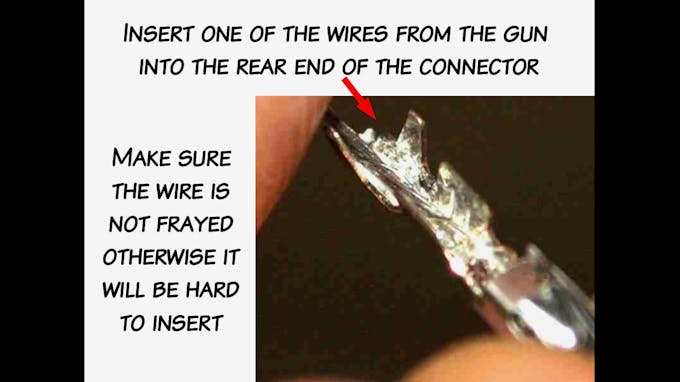
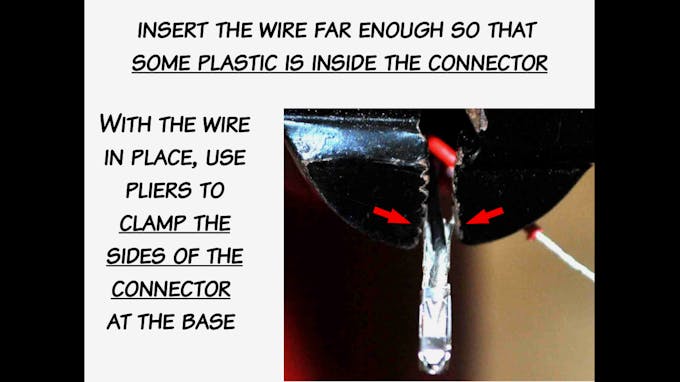
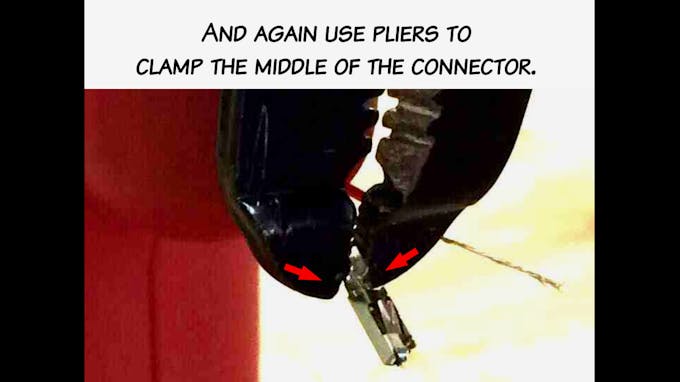
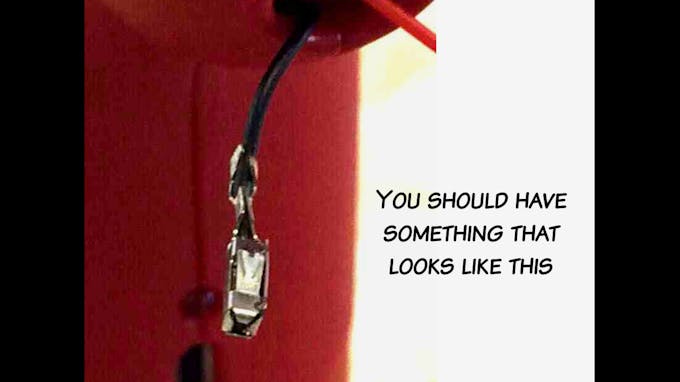
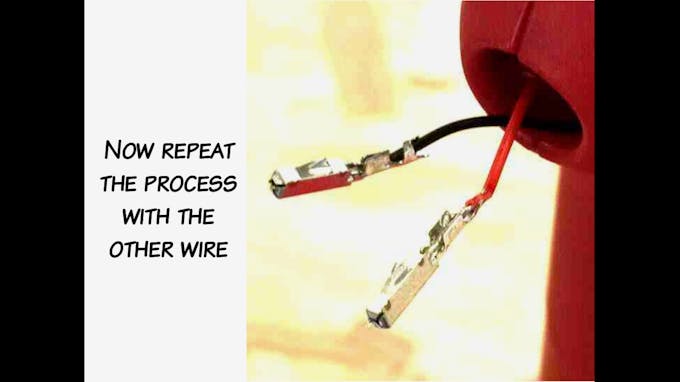
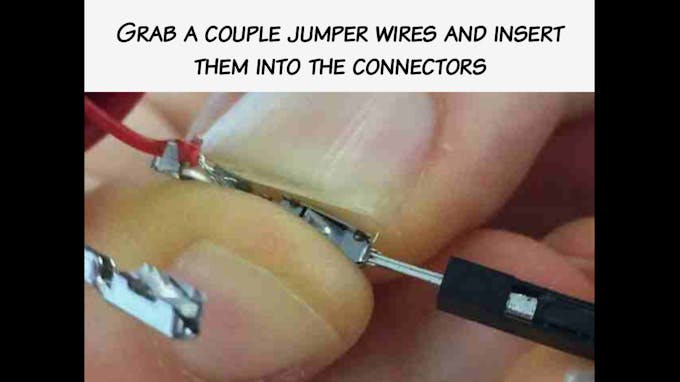
1단계:물총 해킹









2단계:Arduino와 인터페이스
Arduino Nano로 PIR 모션 센서를 설정하고 테스트합니다.
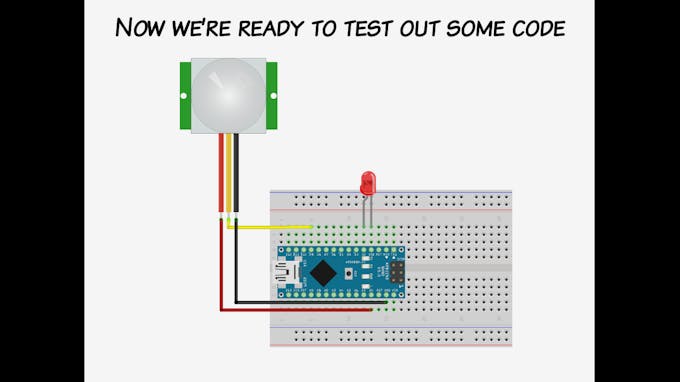
/* * PIR 센서 */ int calibrationTime =10; //센서 보정 시간(데이터시트에 따라 10-60초) int outputPin =2; // LED용 핀 선택 int inputPin =4; // 입력 핀 선택(PIR 센서용) int pirState =LOW; // 움직임이 감지되지 않았다고 가정하고 시작합니다. int val =0; // 핀 상태를 읽기 위한 변수 void setup() { pinMode(outputPin, OUTPUT); // LED를 출력으로 선언 pinMode(inputPin, INPUT); // 센서를 입력으로 선언 digitalWrite(outputPin, LOW); //전원을 켤 때 총이 발사되는 것을 방지합니다. Serial.begin(9600); //센서를 보정할 시간을 줍니다. Serial.print("calibrating sensor "); for(int i =0; i 직렬 모니터를 사용하여 작동하는지 확인한 다음 물총을 연결할 때입니다.
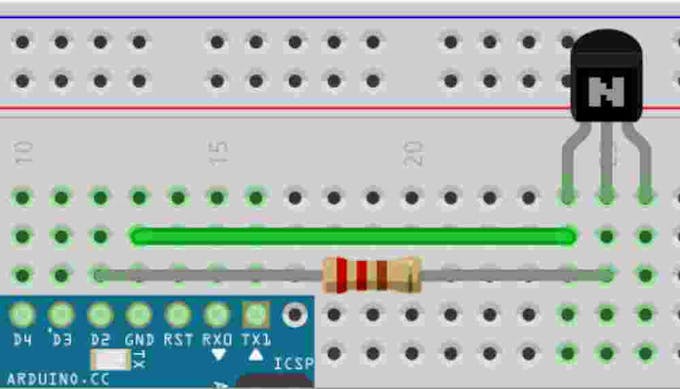
다음과 같이 트랜지스터와 저항을 설정합니다.
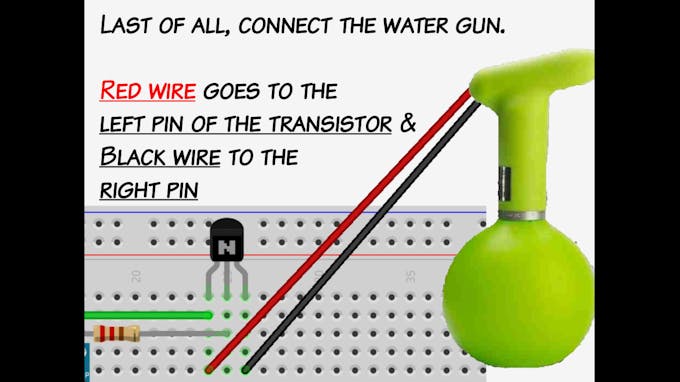
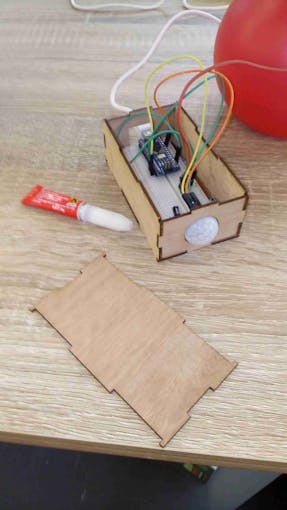
그리고 그것으로 당신은 작동하는 동작을 취해야합니다! 우리는 레이저 절단기를 사용하여 나무로 된 인클로저를 만들었습니다(매우 빠르며 워크샵에 많이 필요했기 때문에). 하지만 3D 프린터를 사용할 수도 있습니다.
모션 센서가 보정할 수 있도록 코드에 10초 지연을 넣었습니다.

제조공정
이 기사에서는 Arduino 색상 분류기를 만드는 방법을 보여 드리겠습니다. 다음 동영상을 보거나 아래에 작성된 기사를 읽을 수 있습니다. 디자인 이 Arduino 프로젝트에 필요한 것은 컬러 센서(TCS3200) 1개와 취미용 서보 모터 2개뿐입니다. 이 덕분에 이 프로젝트는 매우 간단하지만 구축하는 것은 매우 재미있습니다. 먼저 Solidworks 3D 모델링 소프트웨어를 사용하여 색상 분류기의 디자인을 만들었고 작동 원리는 다음과 같습니다. 초기에는 충전기에 고정되어 있는 컬러 주걱이 상단 서보 모터에 부착된 플랫폼으
이 Arduino 자습서에서는 Arduino 보드와 처리 개발 환경을 사용하여 이 멋진 레이더를 만드는 방법을 보여 드리겠습니다. 자세한 내용은 다음 동영상을 보거나 아래에 작성된 튜토리얼을 참조하세요. 개요 이 Arduino 프로젝트에 필요한 것은 물체를 감지하기 위한 초음파 센서, 센서를 회전시키기 위한 작은 취미 생활자 서보 모터 및 이를 제어하기 위한 Arduino 보드뿐입니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.[/column] 이 Arduino 프로젝트에 필요한 구성요소 다음 사이트에서