

제조공정

산업 제조
 |
| × | 1 |
 |
|
새로운 Raspberry Pi가 나올 때마다 사양을 살펴보고 "정말 노트북을 만들고 싶다"라고 생각하지만 항상 한 가지 문제가 발생합니다. 바로 독립형 USB 트랙패드를 찾을 수 없다는 것입니다. 노트북. 따라서 이 프로젝트에서는 오래된 고장난 노트북에서 트랙패드를 회수하여 Arduino Pro Micro를 사용하여 USB 장치로 변환할 것입니다.
1단계:부품

이 프로젝트에 필요한 부품은 정말 간단합니다. 오래된 노트북의 트랙패드, Arduino 마이크로 및 일부 와이어가 필요합니다. 불행히도 우리가 사용할 수 있는 Arduino는 몇 가지뿐입니다. 이들은 Arduino micro, pro micro 및 Leonardo입니다. 이것들은 HID(인간 인터페이스 장치)로 표시되도록 프로그래밍할 수 있기 때문에 컴퓨터에 다음과 같이 표시될 수 있습니다. 마우스 또는 키보드. 이것은 Arduino Uno가 할 수 없는 일입니다. Arduino pro 마이크로는 여기에서 얻을 수 있습니다:여기에서 트랙패드를 구입하고 싶다면 여기에서 찾을 수 있습니다:여기
2단계:작동하는 이유

따라서 트랙패드를 Arduino와 인터페이스할 수 있는 이유는 대부분의 구형 랩톱 트랙패드가 PS/2 인터페이스를 통해 컴퓨터와 통신하기 때문입니다. 즉, 트랙패드 회로에는 데이터 및 클록인 PS/2 출력이 있으며 이 데이터는 Arduino에서 읽혀집니다. USB 인터페이스를 통해 컴퓨터로 보낼 수 있는 데이터로 변환됩니다. 이제 모든 랩톱 트랙패드가 동일하지는 않습니다. 거의 모든 구형 랩톱은 PS/2 인터페이스를 사용하지만 일부 최신 랩톱은 PS/2 인터페이스 대신 USB 인터페이스를 사용합니다. PS/2 대신 이러한 USB 트랙패드 중 하나를 찾은 경우 트랙패드 이름을 구글링하고 USB 핀아웃을 찾아 USB 컴퓨터에 연결하면 작동합니다. 그러나 이 프로젝트에서는 더 일반적인 PS/2 트랙패드를 사용하고 Arduino를 사용하여 USB 마우스로 만들 것입니다.
3단계:배선



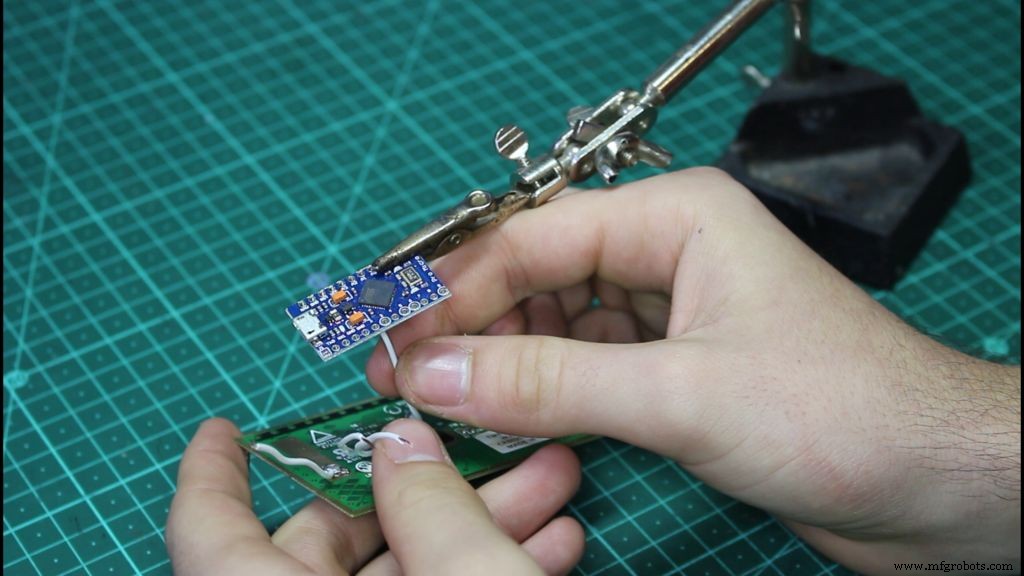
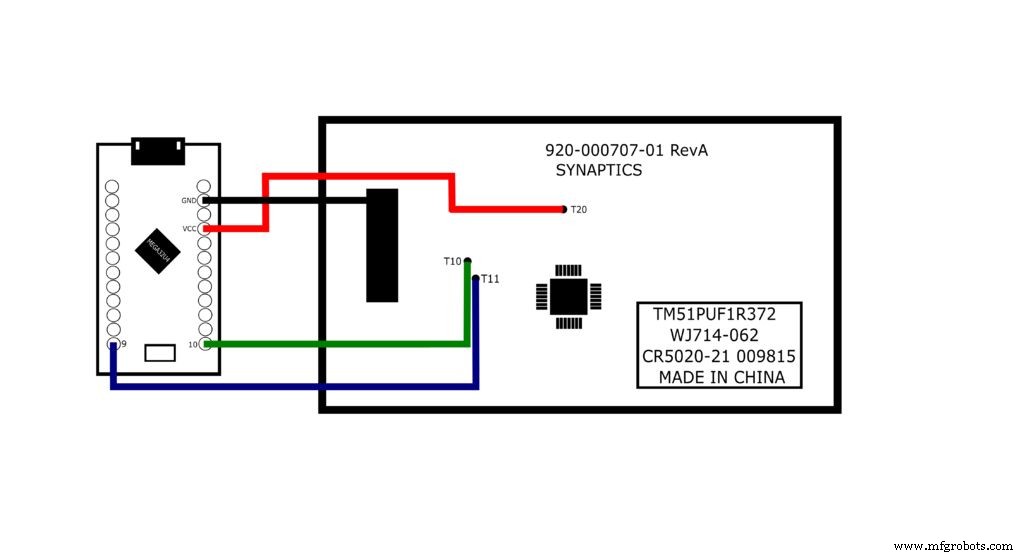
이 프로젝트의 배선은 매우 쉽습니다. 트랙패드에서 4개의 솔더 패드를 찾기만 하면 됩니다. 이들은 T10(데이터), T11(시계) 및 T20으로 레이블이 지정되어 있고 접지 연결이 노출된 큰 금속판이기 때문에 찾기가 매우 쉽습니다. 각 패드에 와이어를 조심스럽게 납땜한 다음 해당 Arduino 핀에 연결해야 합니다.
<울>트랙패드의 패드에 와이어를 납땜한 후에는 이 패드에 압력을 가하지 않는 것이 중요합니다. 패드에 약간의 압력을 가해도 패드가 완전히 당겨져 트랙패드가 무용지물이 될 수 있습니다. 납땜 후 뜨거운 접착제로 연결부를 덮는 것이 가장 좋습니다.
4단계:일부 라이브러리 설치
이 프로젝트의 경우 Arduino IDE에 두 개의 라이브러리를 설치해야 합니다. 이러한 라이브러리는 다음과 같습니다.
<울>그것을 다운로드하고 Arduino IDE의 라이브러리 파일을 열고 드롭하십시오. PS/2 라이브러리는 트랙패드에서 데이터를 가져오는 데 사용되며 마우스 라이브러리를 사용하면 해당 데이터를 가져와 컴퓨터가 읽을 수 있는 마우스 명령으로 바꿀 수 있습니다. USB 포트.
5단계:코드
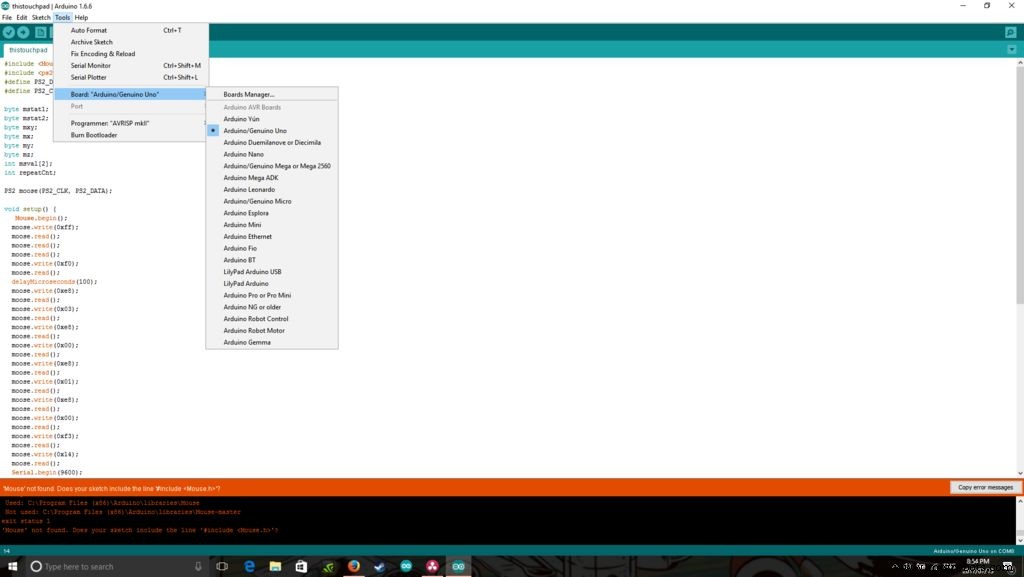
이제 라이브러리가 설치되었으므로 코드를 Arduino에 업로드할 수 있습니다. 코드는 아래에서 찾을 수 있습니다. 그러나 도구에서 선택한 보드가 Arduino 마이크로 또는 Leonardo가 아니면 코드가 업로드되거나 컴파일되지 않는다는 점에 유의해야 합니다. 코드를 컴파일하는 동안 오류가 발생하면 주의하십시오. 코드가 업로드되면 Arduino는 HID 장치로 재부팅되고 컴퓨터에 마우스로 표시됩니다.
이터치패드.이노
6단계:완료 및 문제 해결
이제 터치패드를 터치하면 화면에서 약간의 움직임이 나타나야 하며 Arduino가 USB 장치로 작동하기 때문에 모든 컴퓨터에 연결할 수 있으며 운영 체제나 컴퓨터 유형에 관계없이 USB 마우스로 즉시 부팅됩니다. . 이제 Arduino 프로그래밍 및 배선 프로세스를 수행하고 싶지 않다면 PS/2-USB 변환기를 구입할 수 있지만 이것이 다음에서 오는 데이터를 엉망으로 만든다는 것을 읽었으므로 권장하지 않습니다. 트랙패드는 트랙패드를 사용할 수 없게 만들 수 있으며 Arduino를 사용하여 마우스의 속도, 더블 탭 및 스크롤과 같은 작업을 원하는 대로 완전히 사용자 지정할 수 있습니다. 아두이노 마우스 페이지 여기
트랙패드가 데이터를 다시 보내지 않는 경우 쉽게 해결할 수 있습니다. 트랙패드 뒷면을 살펴보고 부품 번호를 찾은 다음 핀아웃이라는 단어로 이 부품 번호를 구글링하면 데이터가 어디에 있는지 보여야 합니다. , 시계 및 5볼트 핀이 있습니다.
질문이 있는 경우 항상 읽어주셔서 감사합니다. 질문이 있는 경우 댓글에 남겨주세요. 최선을 다해 답변해 드리겠습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include#include #define PS2_DATA 10#define PS2_CLK 9byte mstat1;byte mstat2;byte mxy;byte mx; 바이트 마이; 바이트 mz; int msval[2];int repeatCnt;PS2 무스(PS2_CLK, PS2_DATA); 무효 설정() { Mouse.begin(); 무스.쓰기(0xff); 무스.read(); 무스.read(); 무스.read(); 무스.쓰기(0xf0); 무스.read(); 지연마이크로초(100); 무스.쓰기(0xe8); 무스.read(); 무스.쓰기(0x03); 무스.read(); 무스.쓰기(0xe8); 무스.read(); 무스.쓰기(0x00); 무스.read(); 무스.쓰기(0xe8); 무스.read(); 무스.쓰기(0x01); 무스.read(); 무스.쓰기(0xe8); 무스.read(); 무스.쓰기(0x00); 무스.read(); 무스.쓰기(0xf3); 무스.read(); 무스.쓰기(0x14); 무스.read(); Serial.begin(9600);}무효 ms_read(){moose.write(0xeb); 무스.read(); mstat1 =moose.read(); mxy =moose.read(); mz =moose.read(); mstat2 =moose.read(); mx =moose.read(); 내 =moose.read(); msval[0] =(((mstat2 &0x10) <<8) | ((mxy &0x0F) <<8) | mx ); msval[1] =(((mstat2 &0x20) <<7) | ((mxy &0xF0) <<4) | 내 ); msval[2] =int(mz);} 무효 루프() { ms_read(); if (msval[0]> 0 및 msval[2]> 10) { repeatCnt++; } else { 반복Cnt =0; } if (repeatCnt> 2) { msval[0] =map(msval[0], 580, 5164, -1023, 1023); msval[1] =맵(msval[1], 1120, 5967, 1023, -1023); Mouse.move(msval[0]/200,msval[1]/200); }}
제조공정
구성품 및 소모품 Arduino UNO × 1 12V 200rpm DC 모터 × 2 Arduino Uno용 L293D 모터 드라이브 실드 × 1 HC-05 블루투스 모듈 × 1 브레드보드(일반) × 1 점퍼 와이어(일반) × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 안녕하세요! 제어할 수 있는 모든 것이 좋습니다. 그렇지 않아? 우리 인간은 물건을
구성품 및 소모품 Arduino Mega 2560 × 1 Adafruit 2핀 LCD 디스플레이 × 1 24V 전원 공급 장치 × 1 Adafruit 힘 센서 × 1 팝 범퍼 어셈블리 × 1 팝 범퍼 스위치 × 1 대상 스위치 × 1 롤오버 스위치 × 1 플리퍼 어셈블리 × 1 LED 램프 × 1 이 프로젝트 정보 Arduino 제어 핀