

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 4 |
 |
| |||
 |
|
 |
|
웹사이트의 지침에 따라 이 로봇을 만들었습니다. Arduino와 Android의 공생을 위한 좋은 아이디어입니다.
MobBob은 스마트폰으로 제어되는 로봇입니다. MobBob은 스마트폰의 성능을 활용하여 음성 인식 및 컴퓨터 비전 기능을 갖춘 걷고 말하는 로봇입니다.
3D 프린팅 부품:https://www.thingiverse.com/thing:715688
Android.apk 파일:https://apkpure.com/mobbob/com.cevinius.MobBob
코드에서 다음을 수행할 수 있습니다.
- 빌드와 일치하도록 핀 변수 업데이트
- 서보 센터, 최소값 및 최대값 조정
- 엉덩이 서보가 장착되는 방식에 따라 "FRONT_JOINT_HIPS"를 1 또는 -1로 설정합니다. 몹밥 전면에 서보 악셀로 장착합니다. 이 구성의 경우 이 값을 1로 설정합니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">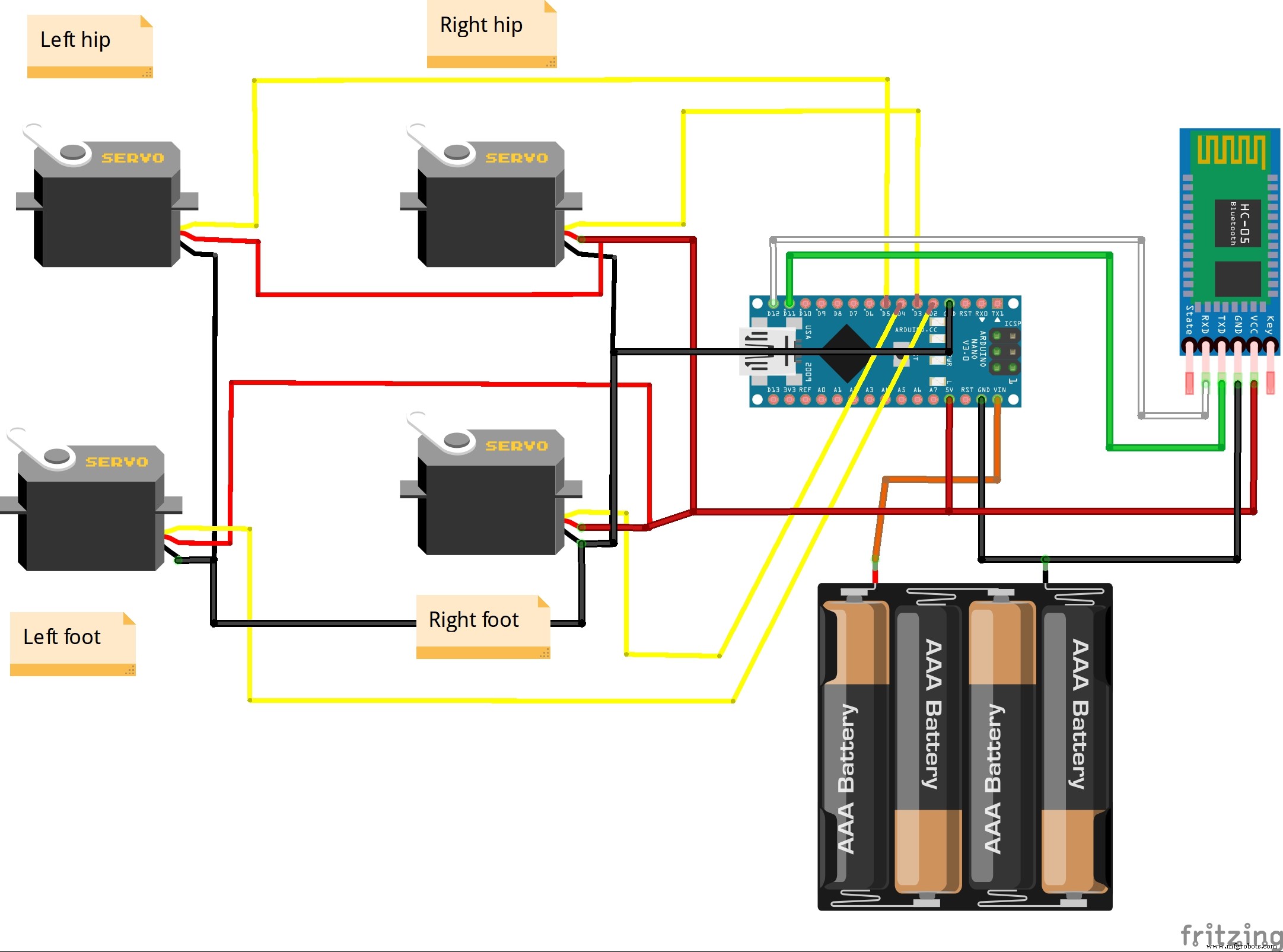
제조공정
구성품 및 소모품 Arduino UNO × 1 SparkFun 3축 가속도계 브레이크아웃 - ADXL335 × 1 RF 모듈 434MHz × 1 HT12D × 1 HT12E × 1 SparkFun 듀얼 H-Bridge 모터 드라이버 L298 × 1 PCB 프로토타이핑(일반) × 1 선형 조정기(7805) × 2 DC 모터(일반) × 1 앱 및 온라인 서비스
이 튜토리얼에서는 맞춤형 Android 애플리케이션을 사용하여 무선으로 제어하고 프로그래밍할 수 있는 Arduino 로봇 팔을 만드는 방법을 배웁니다. 로봇 부품 설계 및 3D 프린팅, 전자 부품 연결 및 Arduino 프로그래밍부터 로봇 팔 제어를 위한 자체 Android 애플리케이션 개발에 이르기까지 전체 제작 과정을 보여 드리겠습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 앱의 슬라이더를 사용하여 로봇 팔의 각 서보 또는 축의 움직임을 수동으로 제어할 수 있습니다. 또한 저장 버튼을 사용