

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 6 | ||||
 |
| × | 7 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
모델 기차 레이아웃을 만드는 것은 훌륭한 취미이며 자동화하면 훨씬 더 좋아질 것입니다! 자동화의 몇 가지 장점을 살펴보겠습니다.
<울>관심이 있으시면 더 간단한 이 프로젝트의 이전 버전을 확인할 수도 있습니다.
이제 더 이상 고민하지 않고 시작하겠습니다!
1단계:내 프로젝트 작업 보기
2단계:모든 부품 및 구성요소 가져오기
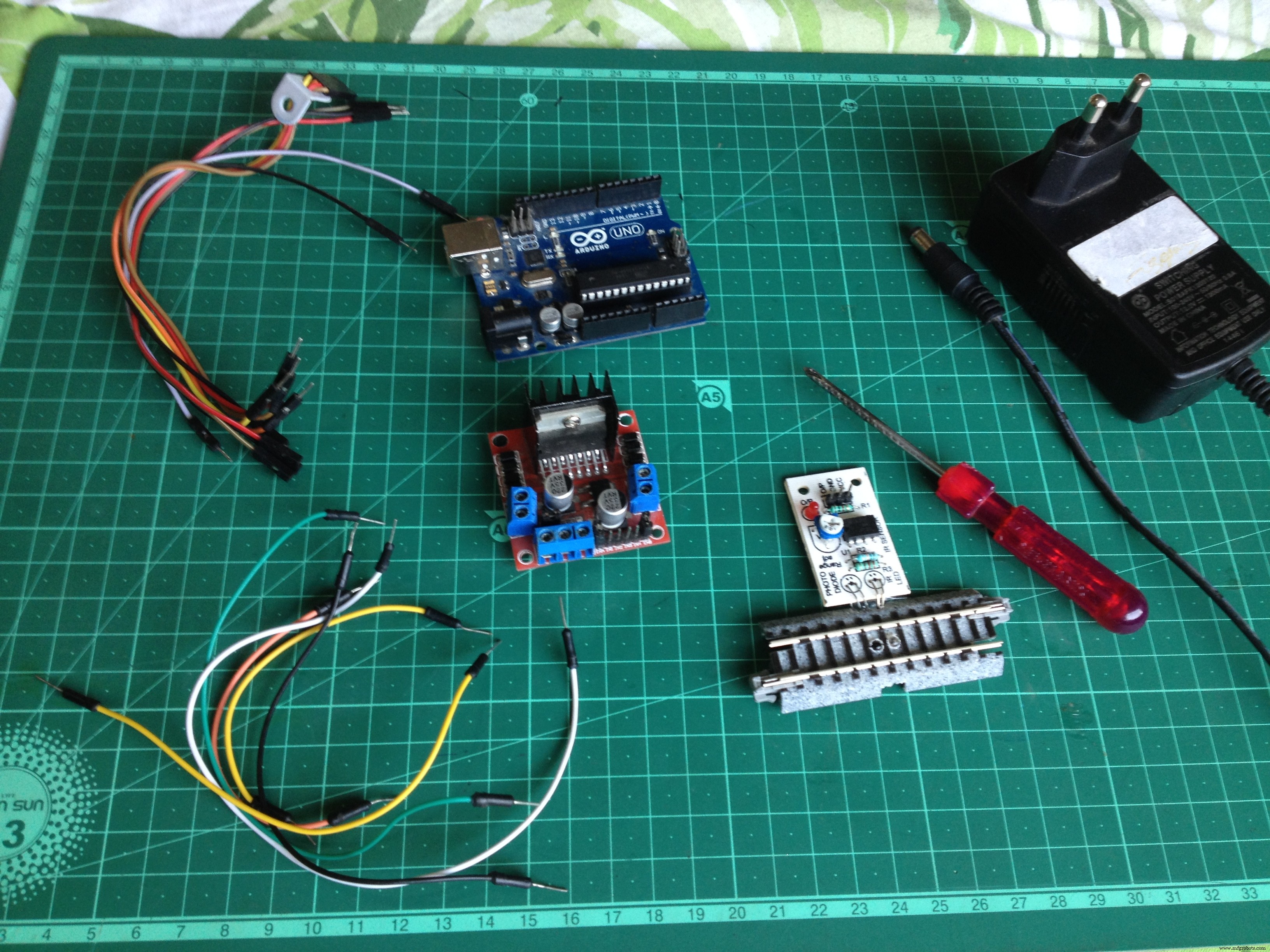
시작하려면 다음이 모두 있는지 확인하세요.
<울>
3단계:Arduino 보드에 프로그램 업로드
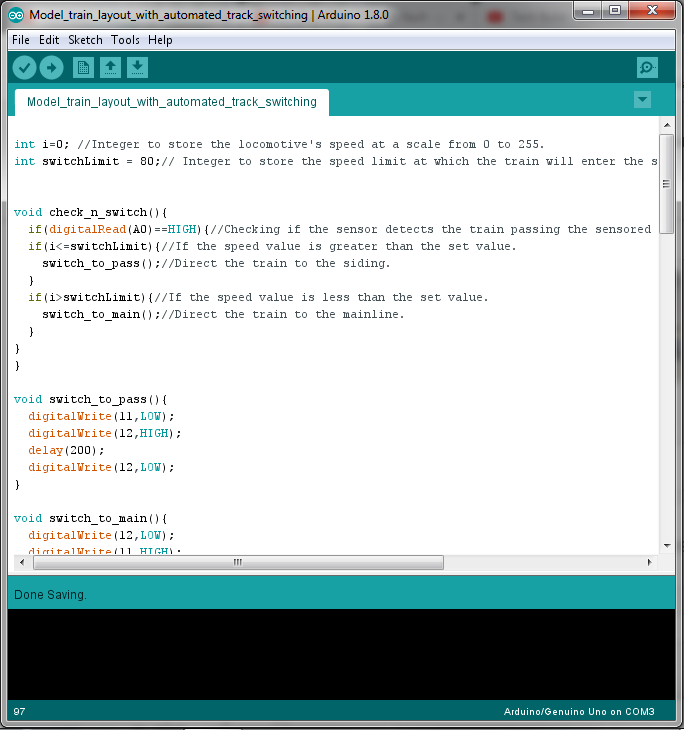
컴퓨터에 Arduino IDE가 없다면 여기에서 다운로드하십시오. 그런 다음 주어진 파일을 다운로드하여 엽니다.
Model_train_layout_with_automated_track_switching.ino
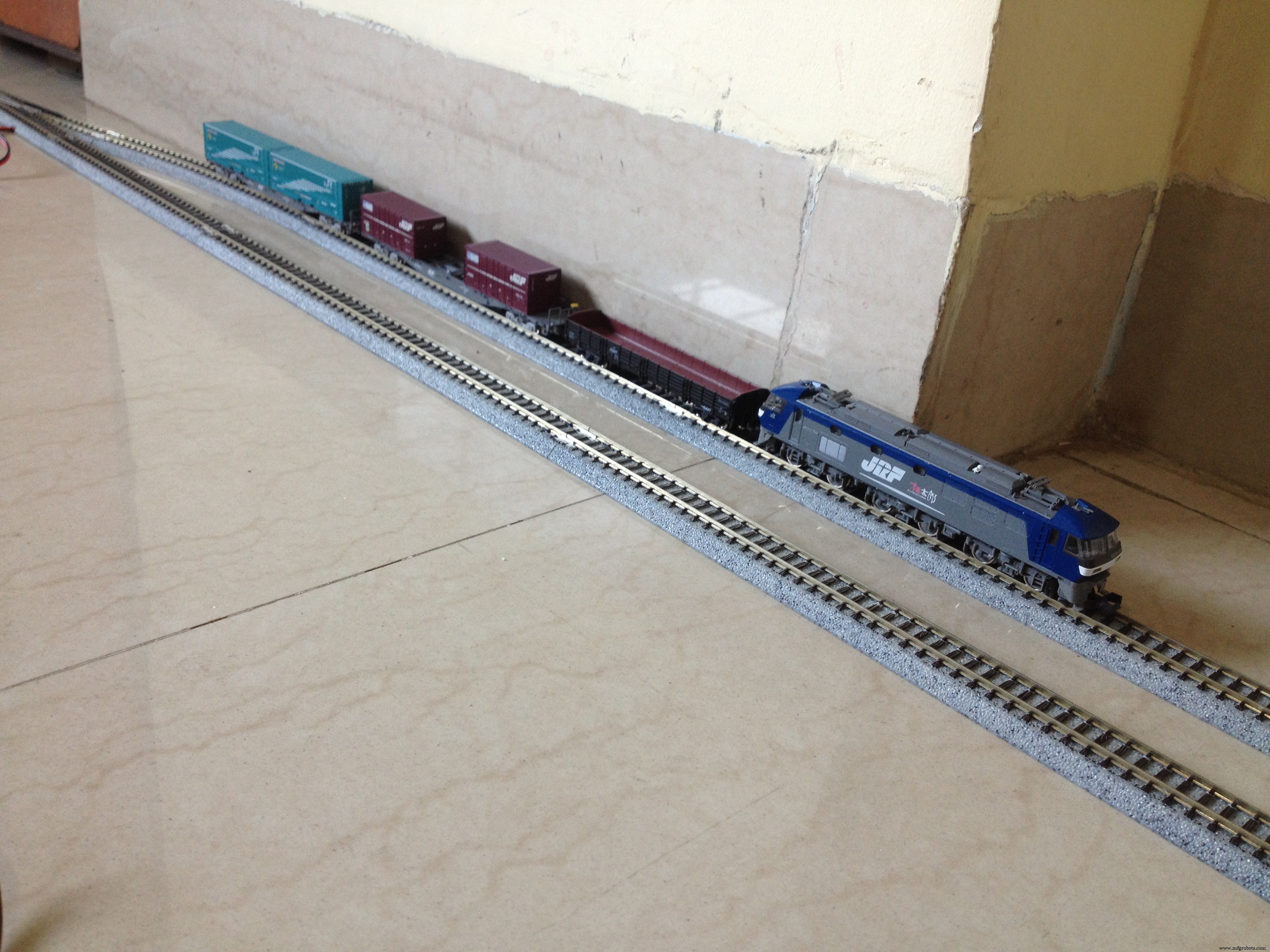
4단계:트랙 배치 및 레이아웃 만들기
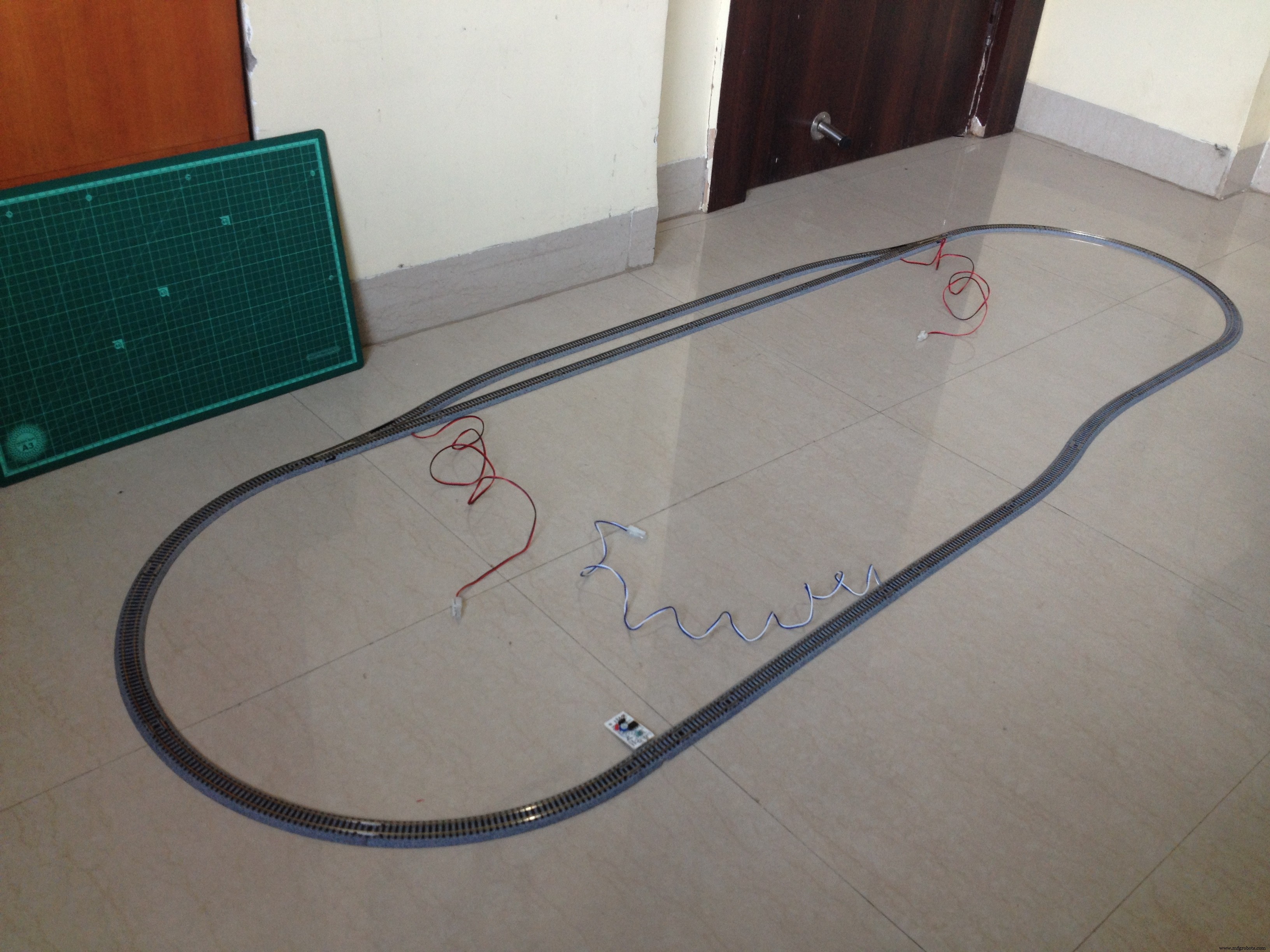
위와 같이 약간 통과하는 사이딩으로 타원형 루프를 만드십시오. 센서 트랙과 열차가 센서 트랙을 건넌 후 교차할 첫 번째 분기점 사이의 거리가 열차의 길이보다 커야 열차가 분기점을 지날 때 센서 트랙 위로 열차의 일부가 넘어가지 않도록 해야 합니다.
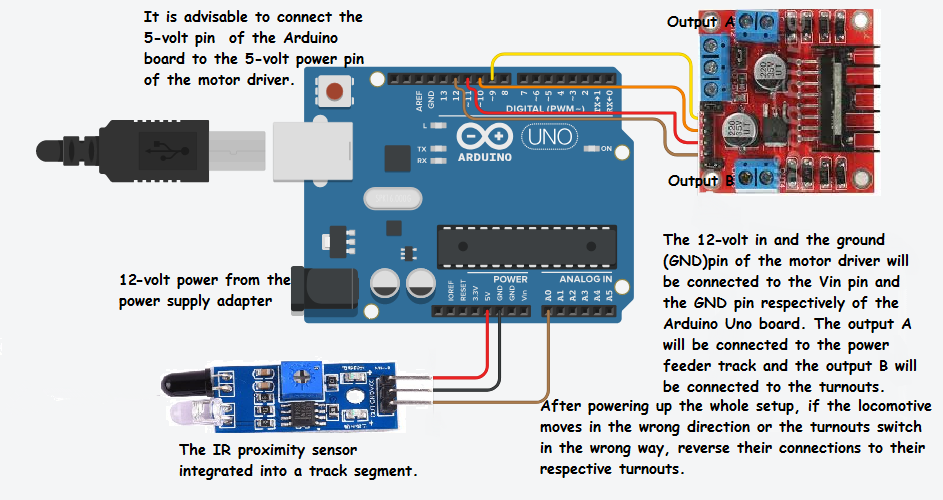
5단계:회로도는 항상 유용합니다.
계속 진행하기 전에 전체 회로도와 모든 세부 사항을 살펴보십시오.
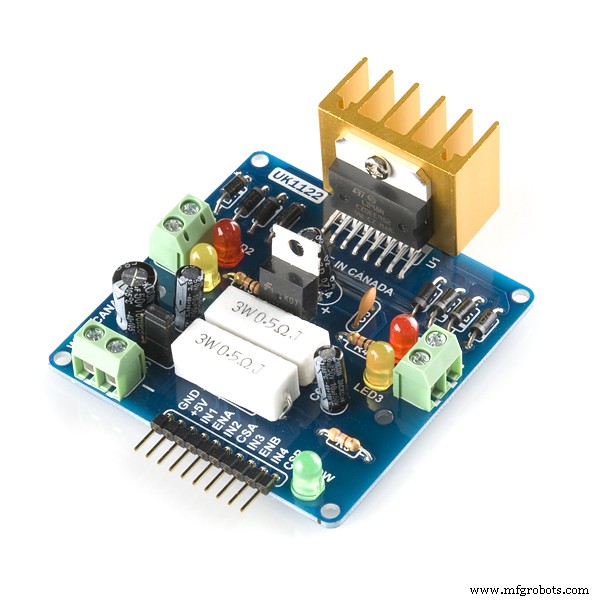
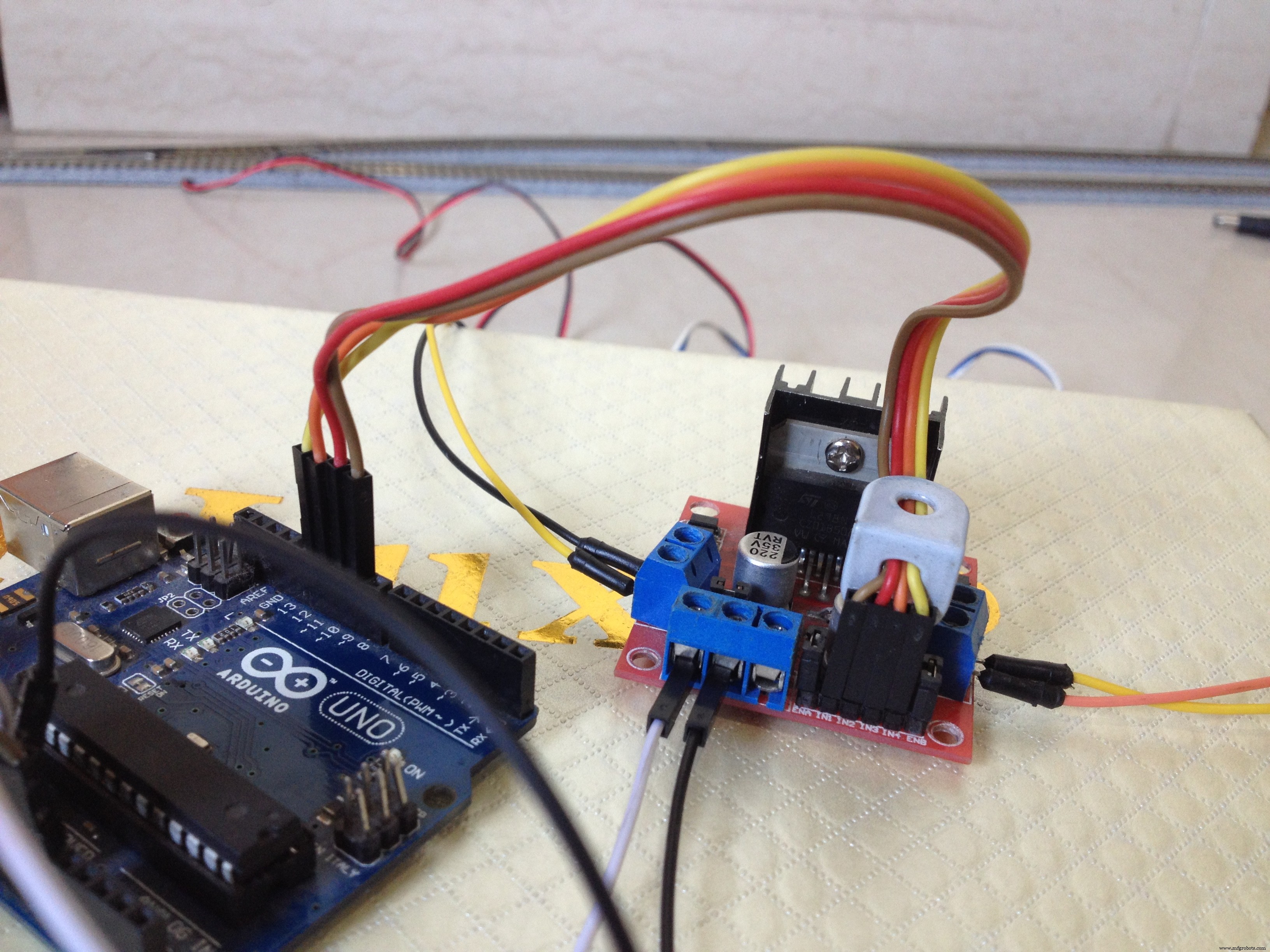
6단계:턴아웃을 L298N 드라이버 보드의 출력에 연결
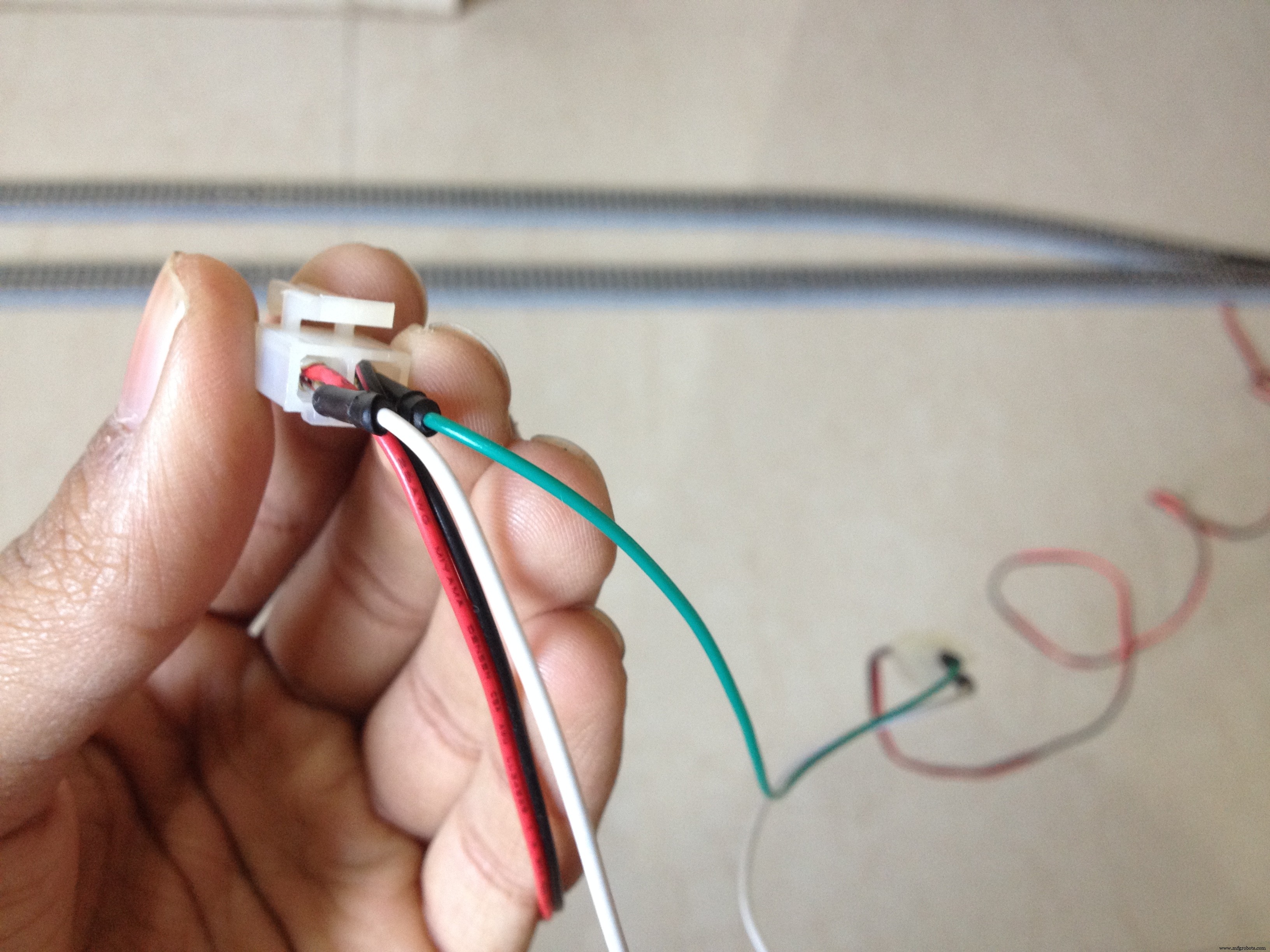
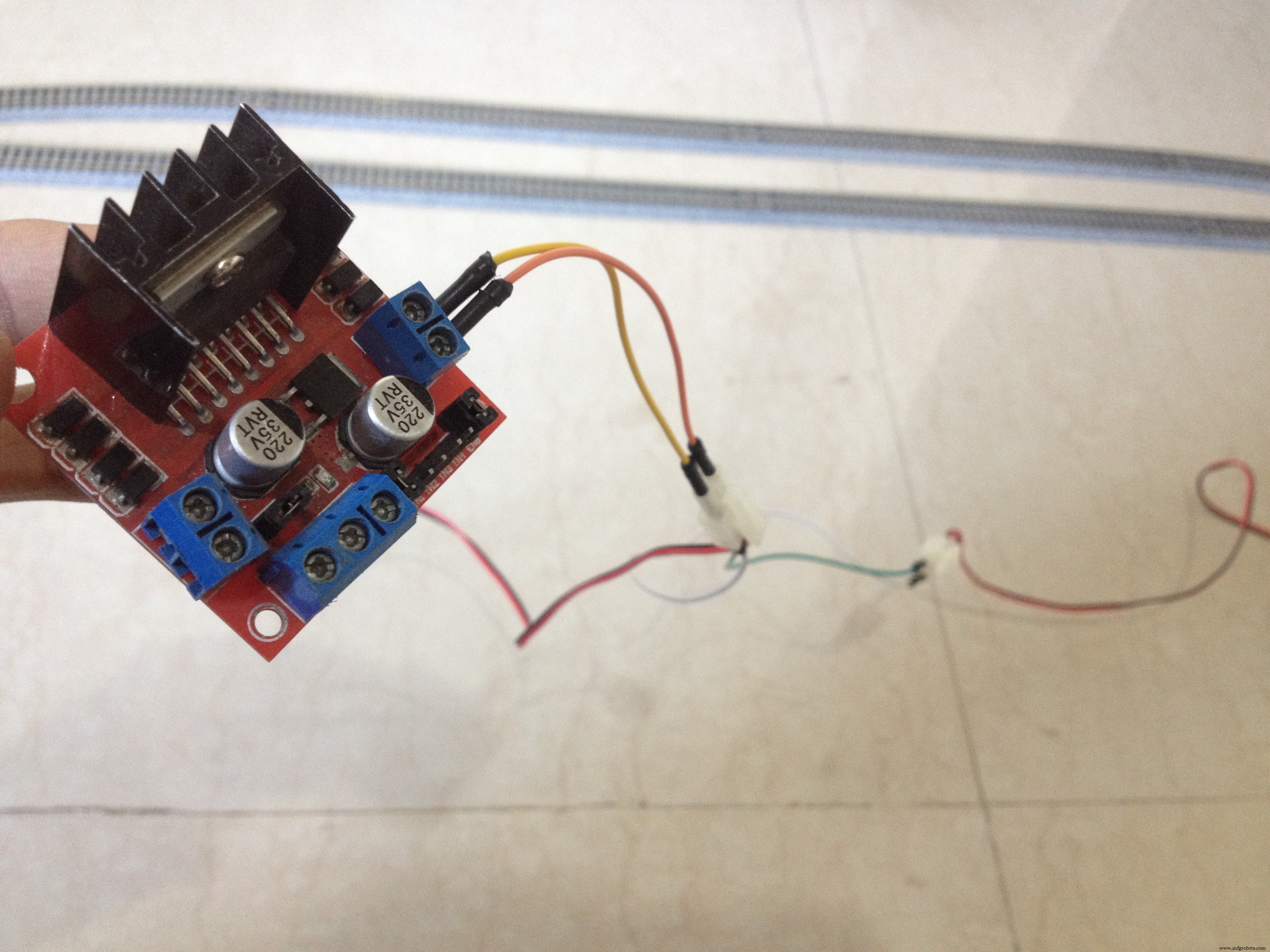
두 턴아웃의 빨간색과 검은색 선을 각각 서로 연결하여 병렬 연결을 만듭니다. 그런 다음 모터 드라이버 보드의 out4 단자에 빨간색 선을 연결하고 out3 단자에 검정색 선을 연결합니다.
7단계:전원 공급 장치 트랙을 L298N 드라이버 보드의 나머지 출력에 연결
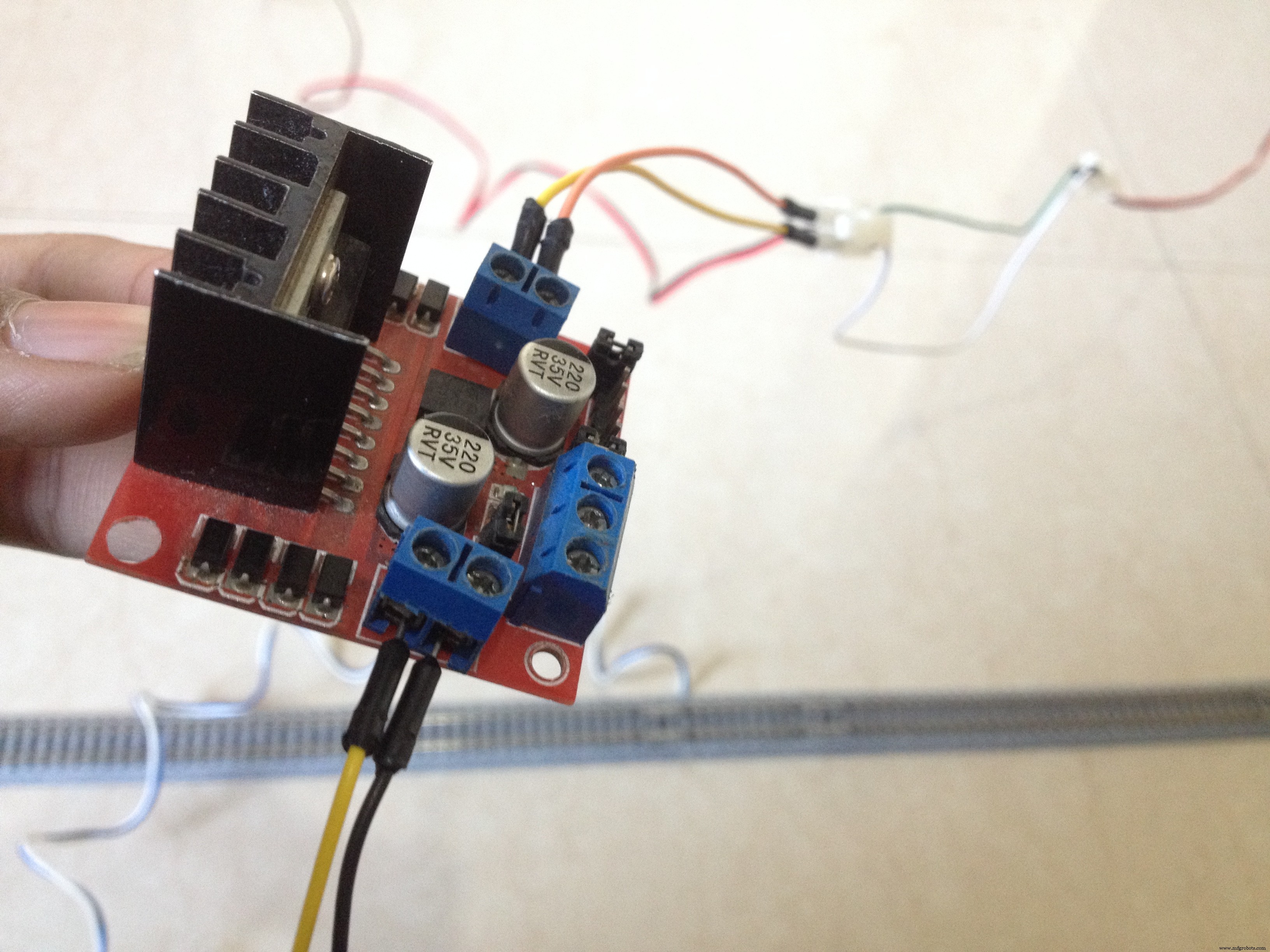
전원 공급 장치의 흰색 선을 모터 드라이버 보드의 out1 단자에 연결하고 파란색 선을 out2 단자에 연결합니다.
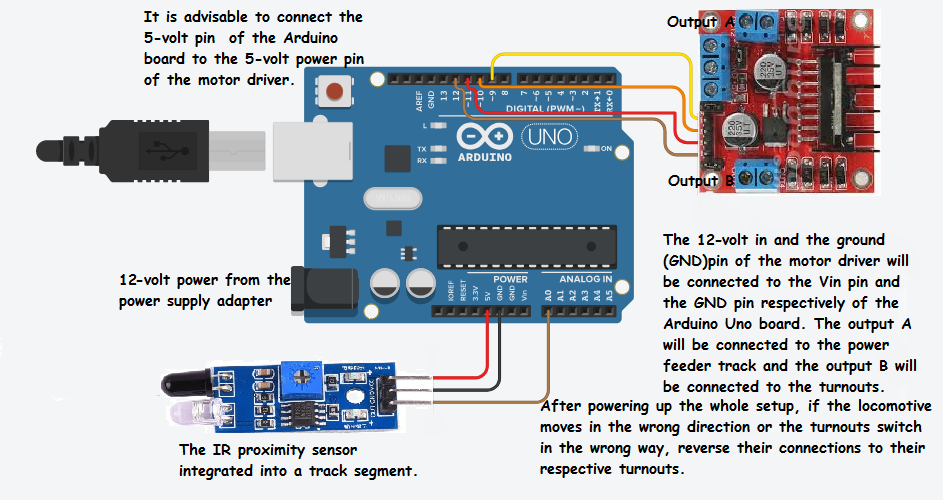
8단계:L298N 드라이버 보드를 Arduino 보드의 전원 핀에 연결
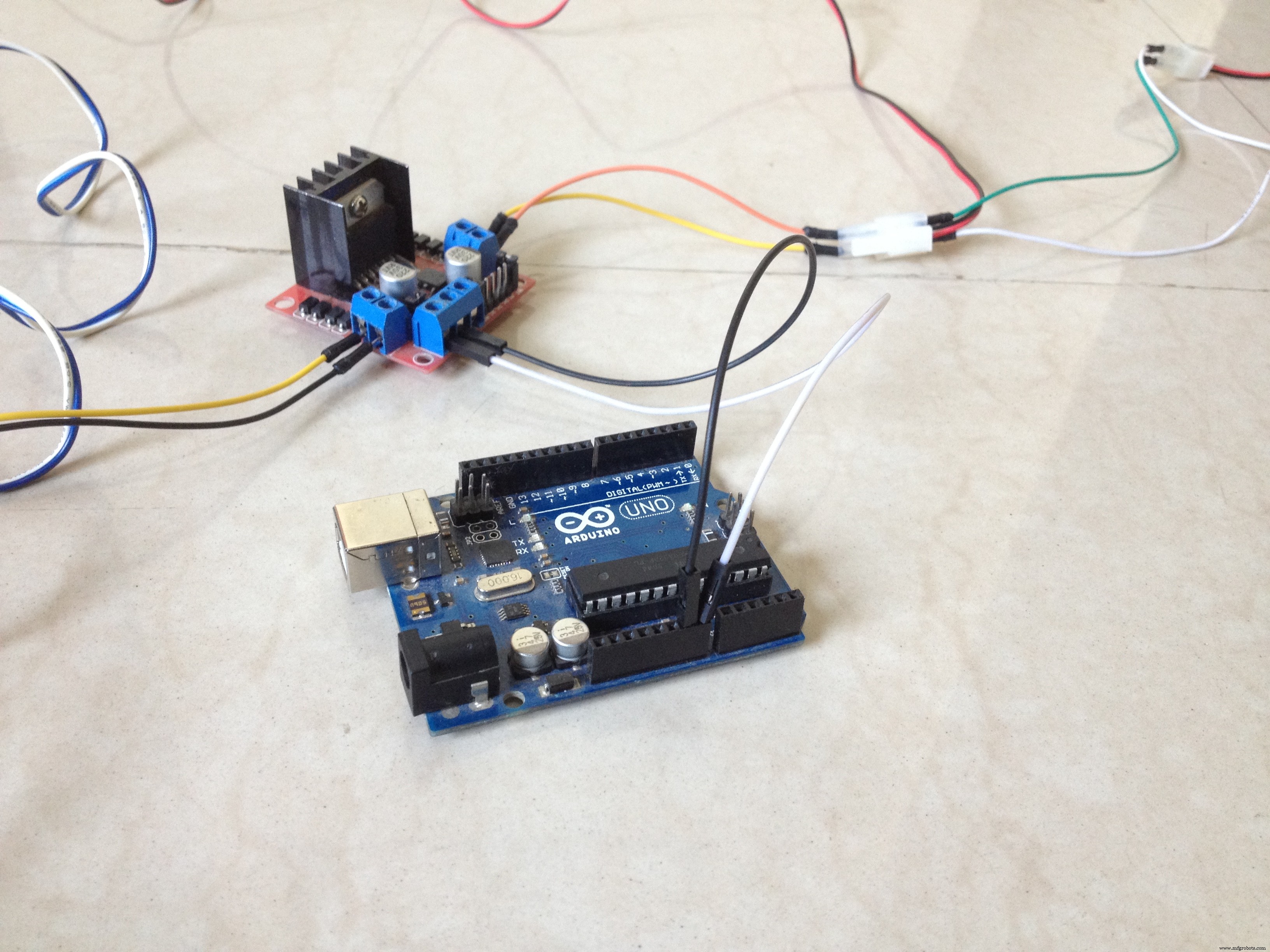
12볼트 핀을 아두이노 보드의 VIN 핀에 연결하고, GND 핀을 아두이노 보드의 GND 핀에 연결하고, 모터 드라이버의 5볼트 핀을 아두이노 보드의 5볼트 핀에 연결하는 것이 좋습니다.
9단계:Arduino 보드에 센서 연결
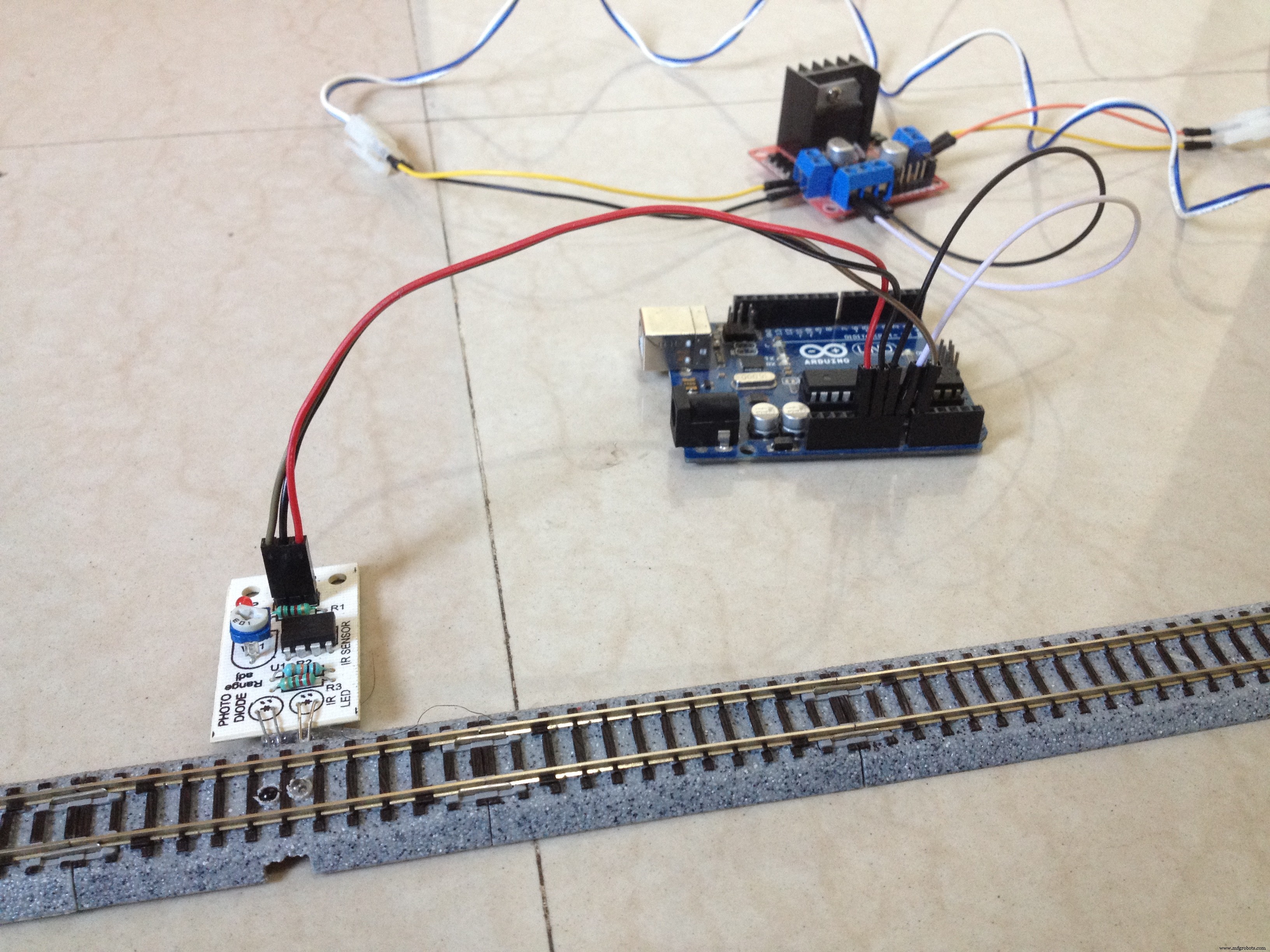
센서의 VCC 핀을 아두이노 보드의 5볼트 핀에, GND 핀을 아두이노 보드의 GND 핀에, OUT 핀을 아두이노 보드의 A0 핀에 연결합니다.
10단계:모터 드라이버의 입력 핀을 Arduino 보드에 연결
Arduino 보드의 디지털 핀을 다음과 같이 모터 드라이버 보드의 입력 핀에 연결합니다.
<울>
11단계:기차를 선로에 놓기
모든 배선 연결을 확인한 후 사이딩에 기차를 배치합니다.
12단계:설정 전원 켜기
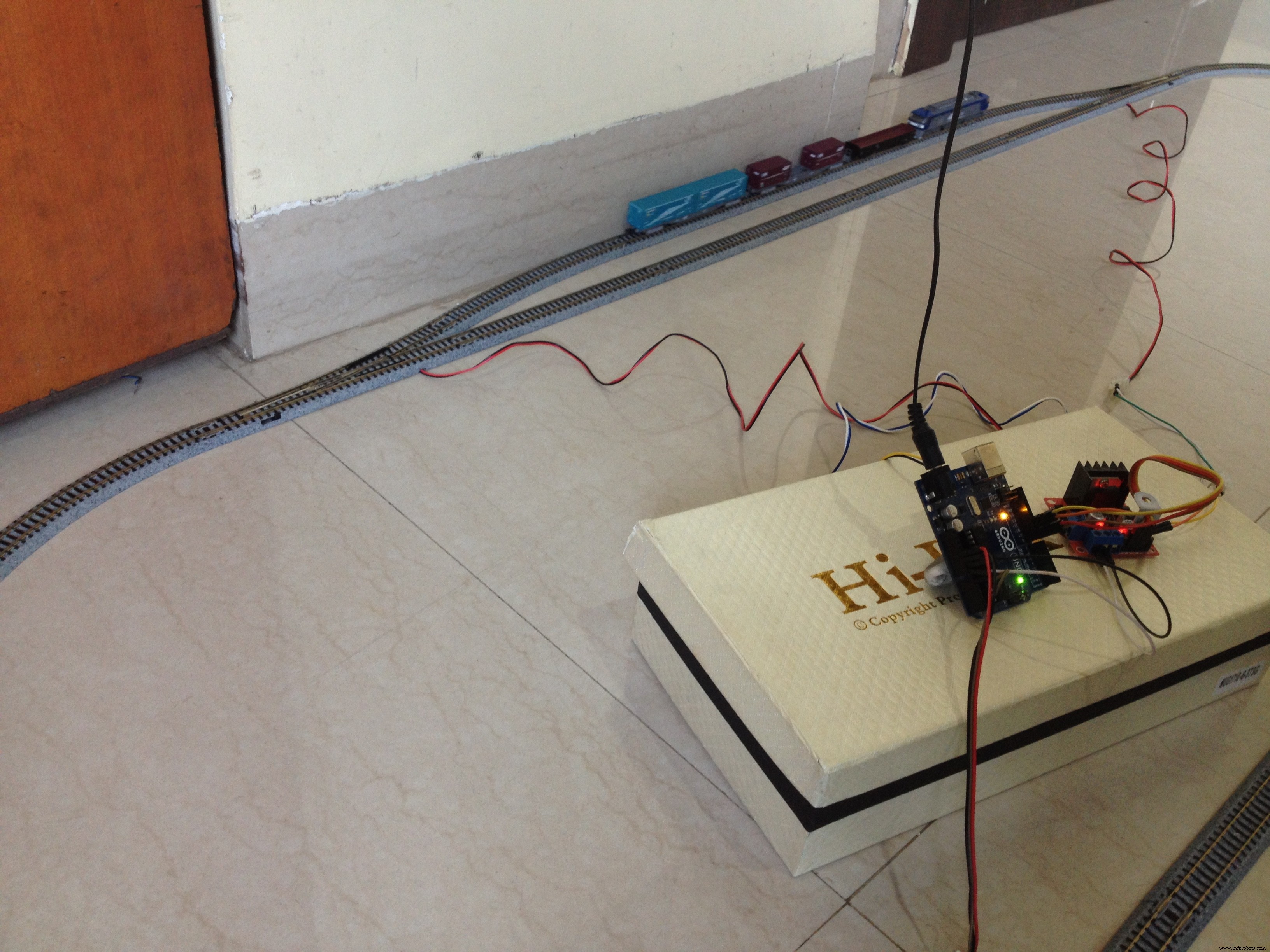
설정의 전원을 켜고 턴아웃이 사이딩으로 전환되었는지 확인합니다. 그렇지 않은 경우 모터 드라이버로 만든 턴아웃의 연결을 반대로 바꾸십시오. 또한 열차가 정방향으로 움직이기 시작하는지 확인하십시오. 기차가 잘못된 방향으로 움직일 경우 모터 드라이버와 피더 트랙의 연결을 반대로 바꾸십시오.
13단계:완료되었습니다!
현재로서는 프로젝트가 완료되었습니다. Arduino 코드를 수정하여 레이아웃의 기능을 변경하고 사이딩을 추가하는 등의 작업을 할 수 있습니다. 모두 사용자 정의할 수 있습니다! 이 프로젝트에 대한 수정 사항에 대해 알고 싶습니다. 아래 의견에 알려주십시오. 최고!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">미리보기 없음(다운로드만 가능).
제조공정
핸드헬드 라우팅 대신 CNC 라우터 또는 로봇 자동화를 통해 공구 경로를 제어할 수 있습니다. 이러한 유형의 라우팅은 처리량을 늘리고 플라스틱 제조업체의 비용을 줄입니다. Fanuc 기반 로봇은 RPT RoboTrim 라우터 트리밍 솔루션에 사용됩니다. Robotic Production Technology는 플라스틱 산업을 위해 특별히 설계된 RT-400을 포함하여 RoboTrim의 15개 모델을 만들었습니다. RT-400은 휴대가 가능하며 열성형기, 사출 성형기, 블로우 성형기 및 회전 성형기에서 사용할 수 있습니다. 로봇이 트
기계 자동화는 회사의 경쟁 우위를 개선하고 생산 비용을 절감하며 제품 품질을 향상시킵니다. 자동화의 가장 분명한 이점은 인건비를 절감하고 위험한 환경에서 육체 노동자를 구출할 뿐만 아니라 정확성과 정밀도를 향상시키면서 에너지와 재료를 절약한다는 것입니다. 두 가지 유형의 자동화에는 피드백 제어와 시퀀스 제어가 포함됩니다. 피드백 제어는 지속적이며 센서로 측정하고 조정하는 작업을 포함합니다. 순차 제어는 프로그램된 작동 순서가 수행될 때 사용됩니다. 일반적으로 단일 컴퓨터는 산업용 애플리케이션에서 피드백과 시퀀스 제어를 모두 제공합