

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
배경
다음은 올바른 도구와 부품으로 약 30분 만에 조립 및 조립할 수 있는 빠르고 쉬운 소형 로봇입니다.
나는 그것을 발명하지 않았다. YouTube에서 이와 같은 동영상을 보고 '이거 재미있어 보이네요. 하나 만들어 보겠습니다.'라고 생각했습니다.
그래서 나는 정크 박스에서 서보 몇 개를 꺼냈습니다. 이 배터리로 할 수 있는 멋진 것을 찾기 위해 보관해 두었던 오래된 휴대폰 배터리, 할당량에 도달해야 했기 때문에 변덕스럽게 구입한 Arduino Pro 3.3v였습니다. 무료배송하고 출근했습니다.
1시간 정도 후에, 여기가 있었습니다!
조립
기본 조립부터 시작하겠습니다.
서보 중 하나에서 전선이 나오는 쪽 반대편에 있는 장착 암을 잘라냅니다(이것이 후면 서보가 될 것입니다). 뒤쪽 서보는 아래를 가리키고 다른 하나는 앞쪽을 가리킵니다. 접착제나 케이블 타이를 사용하여 함께 묶을 수 있습니다.

다음으로 빨간색과 검은색 와이어를 휴대폰 배터리의 양극과 음극에 연결합니다(일부 전기 테이프로 제자리에 고정했습니다). Li-Ion 배터리가 있다면 그것으로 고생할 필요가 없습니다 :)
그런 다음 배터리에 미니 브레드보드를 붙였습니다. 물론 그럴 필요는 없습니다. 이 로봇의 부품을 재사용할 계획인지 여부에 따라 다릅니다.
배터리와 브레드보드를 서보 장치에 케이블로 묶습니다.
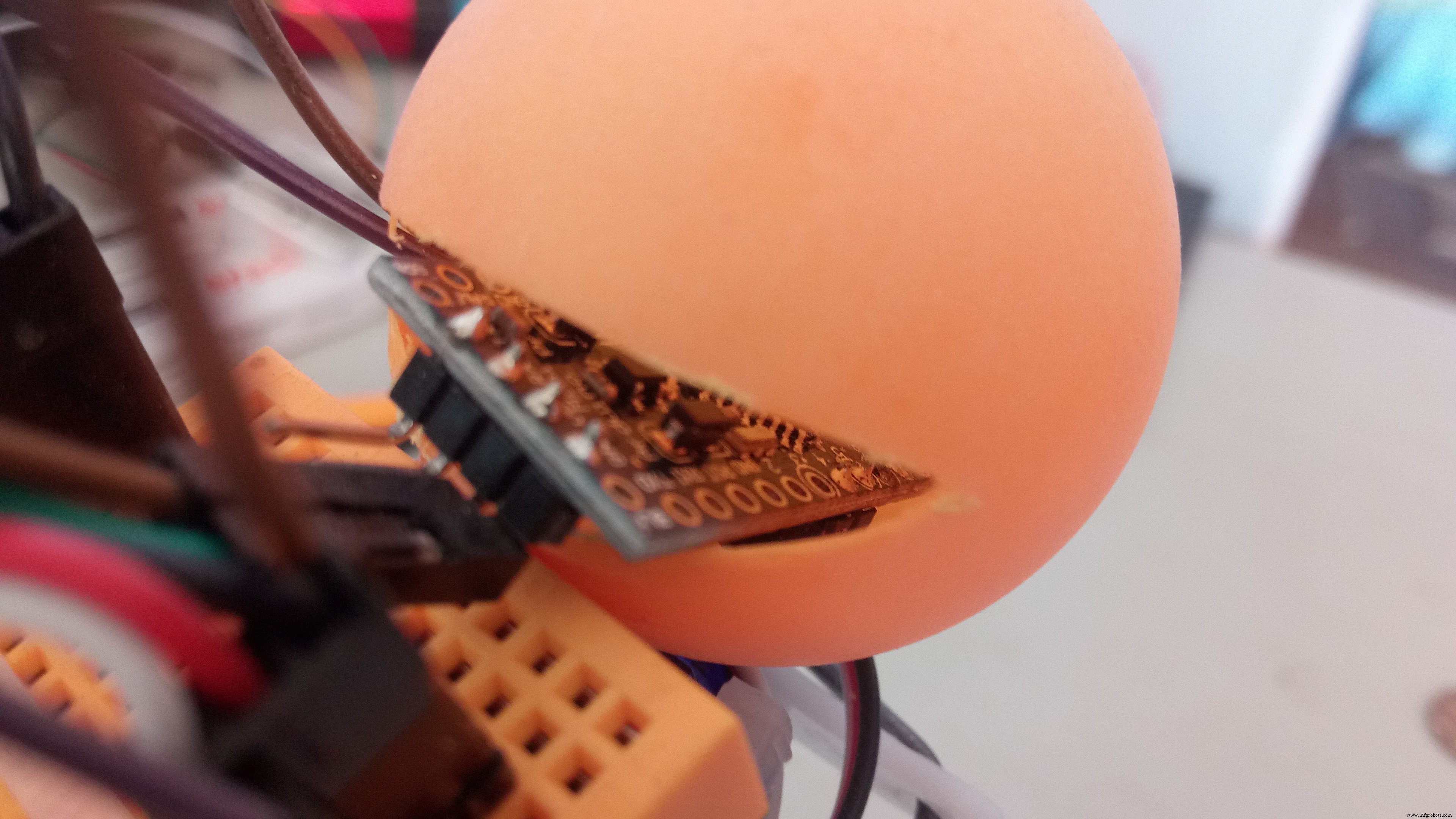
탁구공에 쐐기를 자릅니다. 쉬워보이죠? :) 아마도 이 전체 튜토리얼에서 가장 어려운 단계일 것입니다! 탁구공은 놀라울 정도로 단단하고 또한... 둥글다. 둥근 것을 자르려면 인내심이 필요합니다. 그리고 착용 고글 !!! 절단에 사용하는 장치는 중요하지 않습니다. 플라스틱(또는 광산이 만들어진 이상한 재료)은 많이 쪼개집니다. 그래서 고글 ! 자르기를 마친 후에도 이 튜토리얼의 나머지 부분을 계속 읽을 수 있기를 바랍니다!
Arduino가 구멍에 잘 맞는지 확인하십시오. 그런 다음 탁구공을 동물의 나머지 부분에 붙입니다.
다리를 위해 나는 당신을 당신 자신의 장치에 맡깁니다. 광산은 1mm 두께의 강철 와이어로 된 간단한 조각으로 서보의 날개 장착부 안팎으로 구부러졌습니다(그림 참조). 각 다리 끝에는 그립을 위해 글루건 스틱에서 잘라낸 작은 발을 배치했습니다.
라이터로 전선을 가열하고 임시 발에 심기 만하면됩니다. 접착제는 접촉 시 녹아서 정말 빨리 다시 굳습니다.
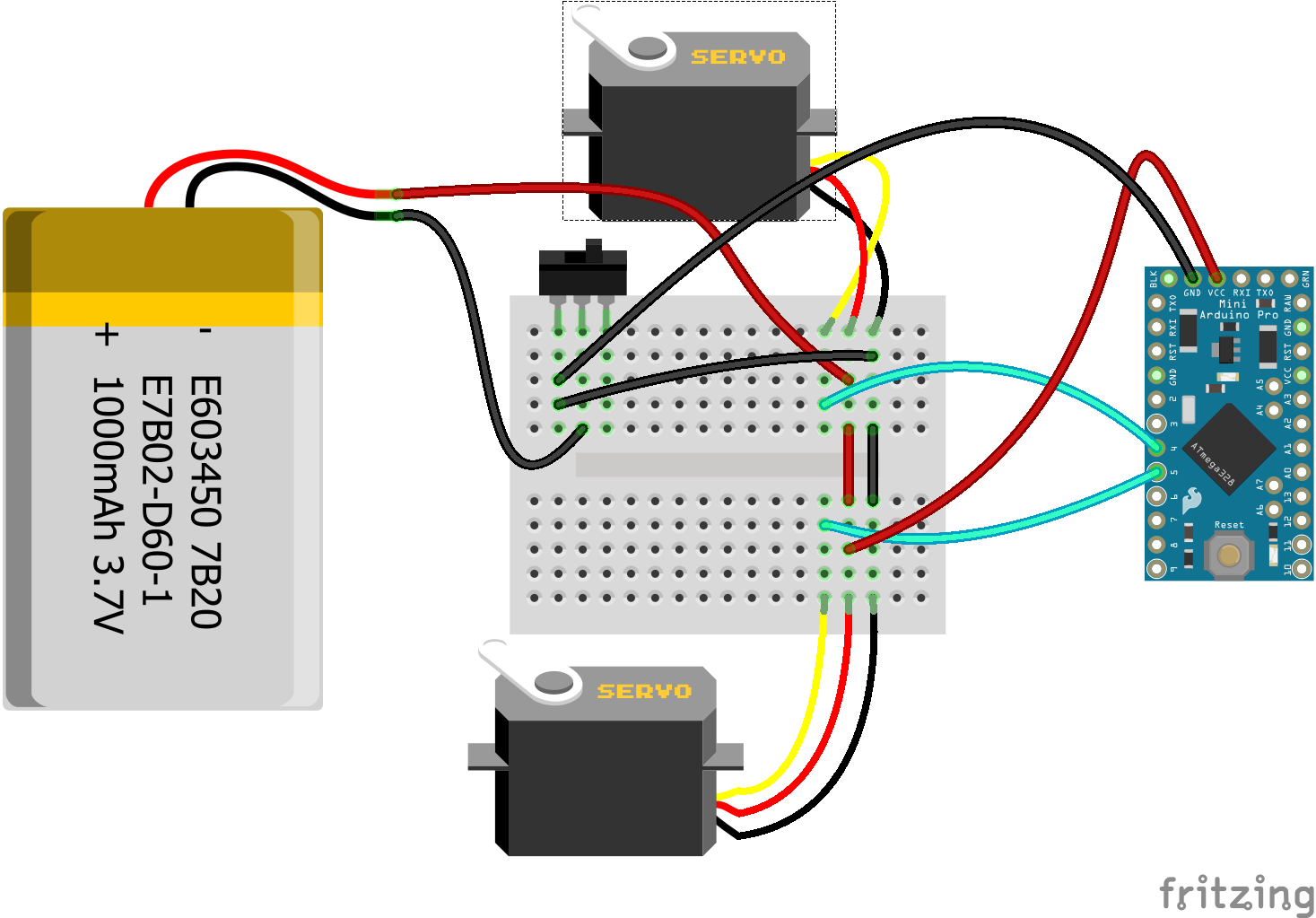
나머지 괴물에 다리를 연결하기 전에 회로를 구성하고 스케치를 보드에 로드해야 합니다. Arduino Pro Mini에 스케치를 업로드하는 방법을 모르는 경우 이에 대해 읽어야 합니다. https://www.arduino.cc/en/Guide/ArduinoProMini
이 코드는 매우 간단하므로 자세히 설명하지 않겠습니다.
설정이 끝날 때 5초 지연이 있으므로 다리가 움직이기 시작하지만 중앙에 배치된 후에 Arduino의 플러그를 뽑을 시간이 있습니다.
이제 다리를 제자리에 놓고 나사로 조일 수 있습니다.
다리가 제자리에 고정되면 프로그램을 편집하고 13행에서 지연을 단축(또는 제거)하도록 선택할 수도 있습니다.
데모
모든 것이 잘 되었다면 이제 다음과 같이 생긴 귀여운 녀석이 생겼을 것입니다.
그리고 댓글에서 ClaudioGasp의 트리케라톱스 영상도 확인해보세요! 굉장합니다!
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#includeint FRONT =4;int BACK =5;서보 frontLegs, backLegs;void setup() { pinMode(13, OUTPUT); //이것은 꽤 깜박이는 frontLegs.attach(FRONT); backLegs.attach(뒤로); frontLegs.write(90); //서보 중심 backLegs.write(90); //서보 딜레이(5000)를 중앙에 둡니다. //5초 기다림(이렇게 하면 다리를 고정할 수 있도록 // arduino의 플러그를 뽑을 시간이 주어집니다.}void loop() { digitalWrite(13,HIGH); //LED on delay(200); frontLegs.write(70 ); //앞다리를 약간 이동 delay(200); backLegs.write(70); //뒷다리를 조금 이동 digitalWrite(13,LOW); //LED 꺼짐 delay(200); frontLegs.write(110); //앞다리를 약간 이동 delay(200); backLegs.write(110); //뒷다리를 약간 이동}
제조공정
구성품 및 소모품 Arduino UNO 기본 구성요소 중 하나입니다. × 1 초음파 센서 - HC-SR04(일반) 기본 구성요소 중 하나입니다. × 1 리튬 이온 배터리 1000mAh 기본 구성요소 중 하나입니다. × 2 RGB 확산 공통 음극 기본 구성요소 중 하나입니다. × 1 부저 필요한 용품 중 하나 × 1 저항 330옴 필요한 용품 중 하나 × 3 USB-A-B 케이블 필요한 용품 중 하나 × 1
구성품 및 소모품 Arduino MKR IoT 번들 × 1 앱 및 온라인 서비스 자피어 ThingSpeak API 이 프로젝트 정보 참고:이 튜토리얼은 오래되었을 수 있습니다. 여기 최신 버전의 경우 소개 영국 시인 윌리엄 워즈워스가 한 번 말했듯이 당신의 마음은 정원이고, 당신의 생각은 씨앗이며, 수확은 꽃이나 잡초가 될 수 있습니다. 당신의 식물을 살아있게 유지하는 것은 의사 소통이 매우 나쁘기 때문에 꽤 어려울 수 있습