

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
 |
|
 |
| |||
 |
|
소개
이 튜토리얼은 안드로이드 스마트폰으로 제어되는 픽앤플레이스 로봇을 만드는 방법을 보여줍니다. MIT App Inventor 플랫폼을 사용하여 모바일 앱을 구축했습니다. 이 튜토리얼에서는 이 프로젝트의 각 부분에 대해 개별적으로 이야기할 것입니다. 우리는 다음에 대해 이야기할 것입니다:
<울>따라서 이 튜토리얼이 봇을 구축하는 데 필요한 모든 사항을 다루기를 바랍니다.
시나리오
먼저 로봇이 명령을 받는 방법을 알아야 합니다. 우리는 나중에 구축할 모바일 앱에 연결할 블루투스 모듈을 사용하고 있습니다. 지금은 블루투스 연결을 사용하여 모바일로 로봇에 명령을 보낼 것임을 알아야 합니다.

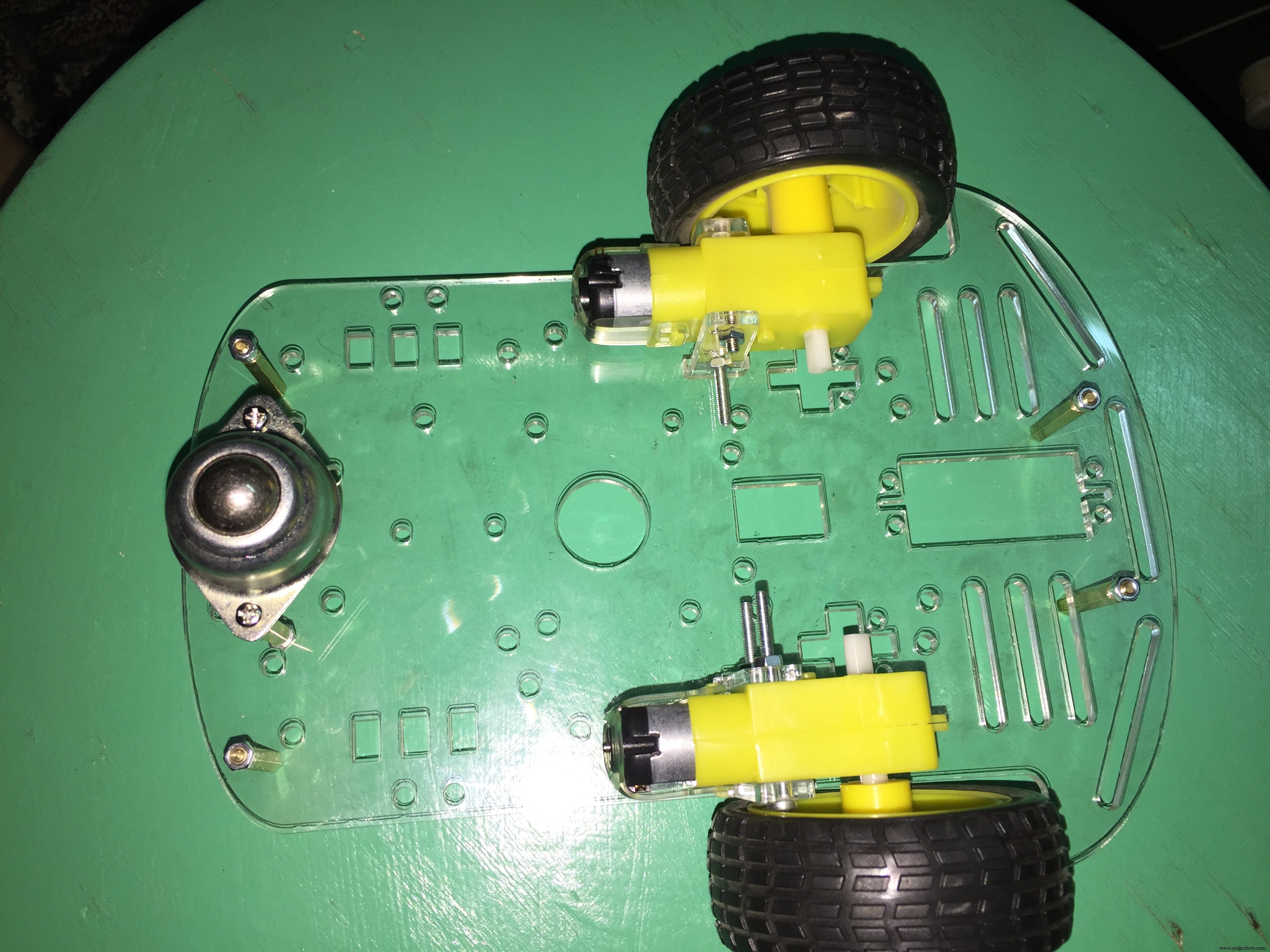
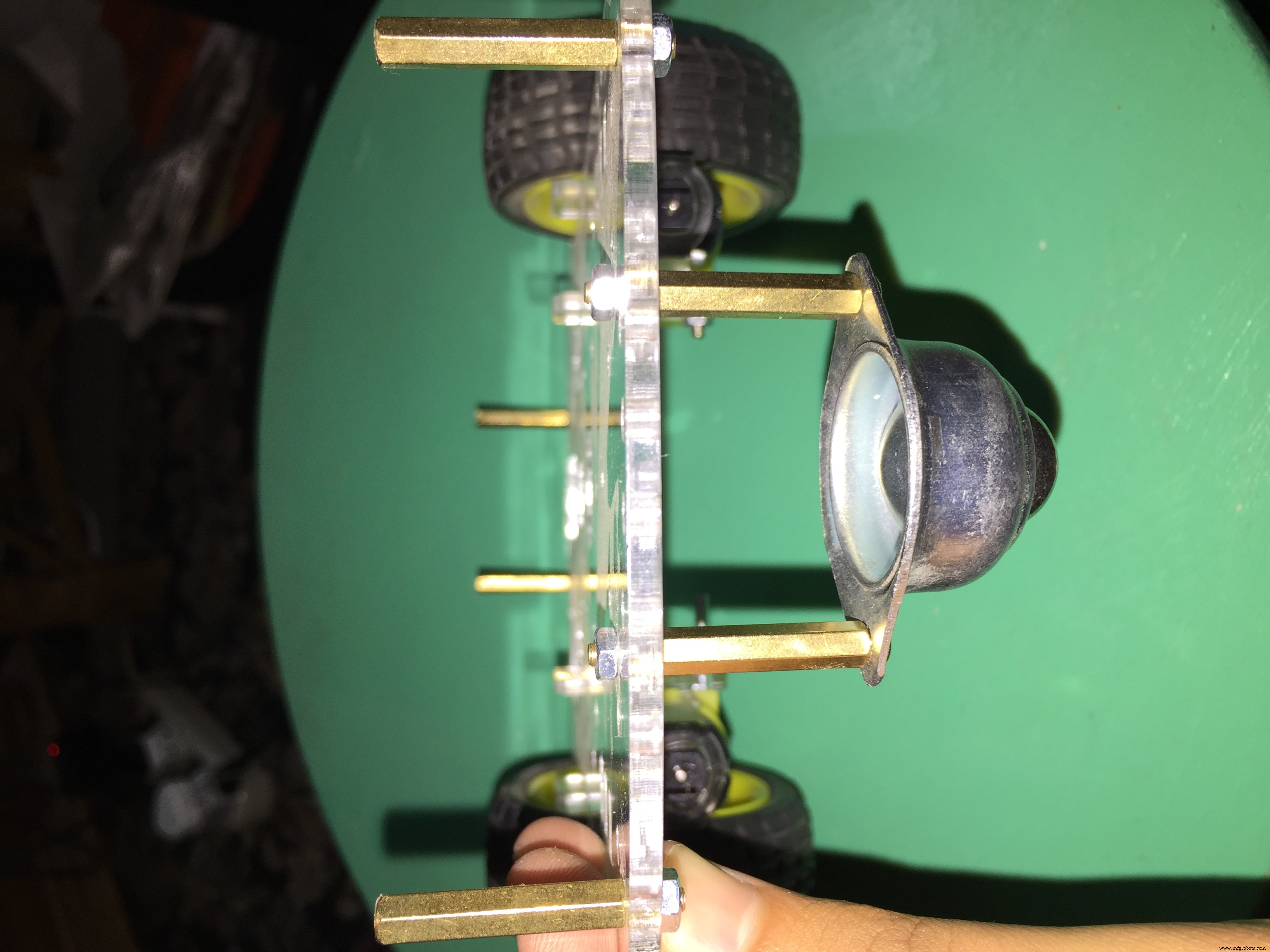
하드웨어 <울>
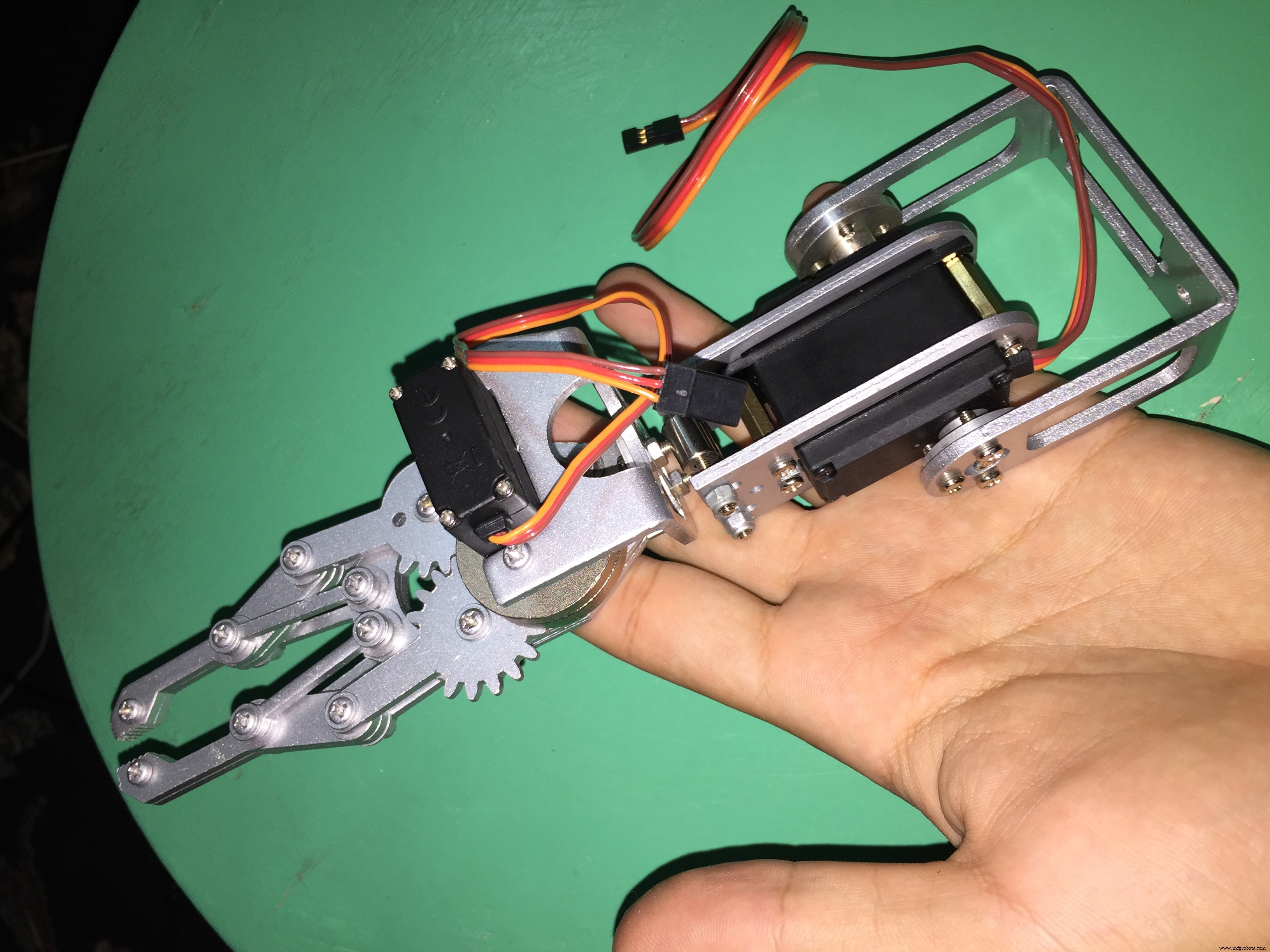
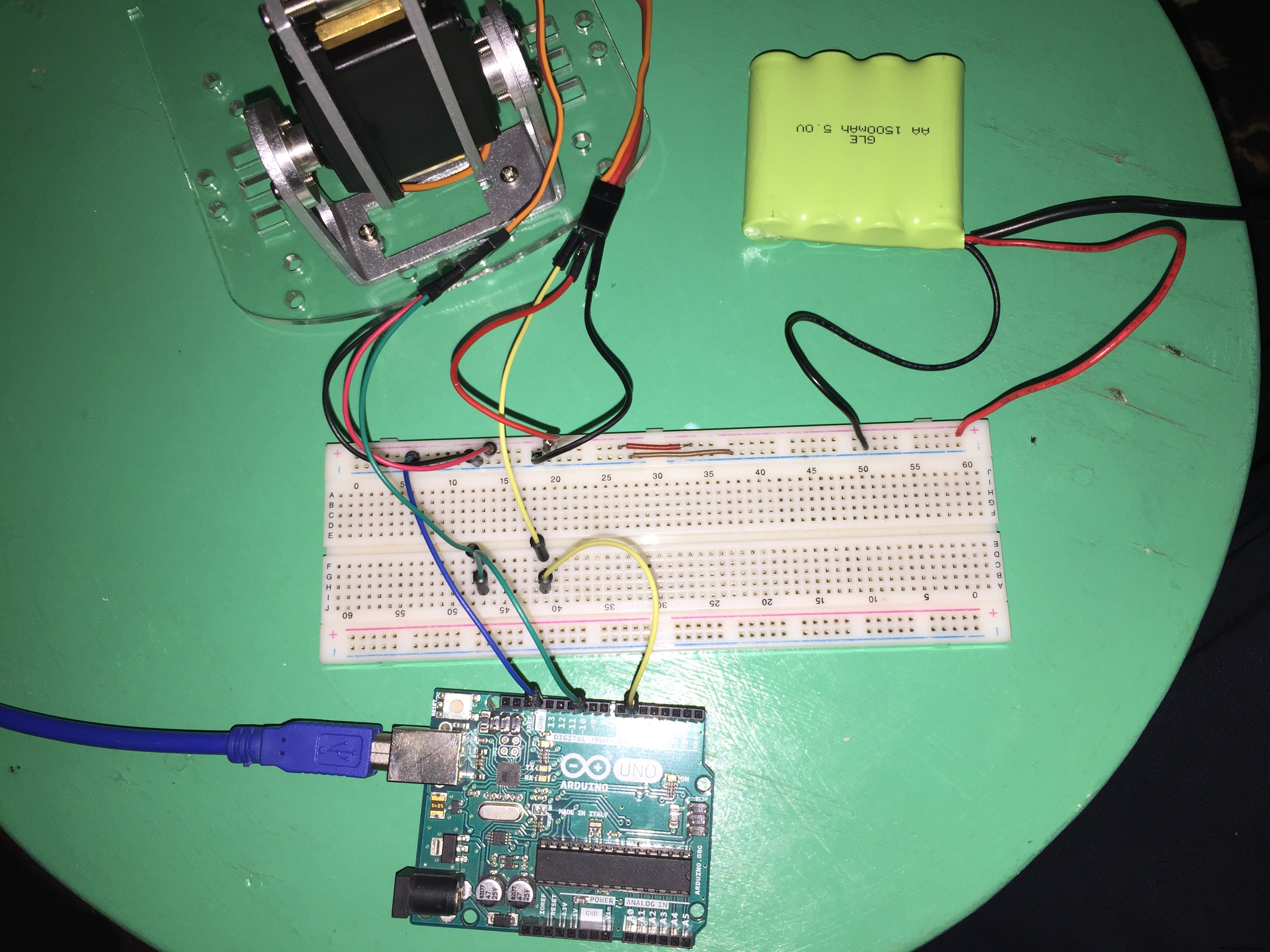
어셈블리가 끝나면 다음과 같아야 합니다.
모터 실드를 사용하면 모터와 대화할 수 있습니다. 모터를 Arduino 보드에 직접 연결하면 불이 납니다! 모든 모터에는 최소 80MA가 필요하지만 디지털 Arduino 핀이 제공할 수 있는 최대 전류는 40MA이므로 마십시오 모터를 Arduino 보드에 직접 연결해 보십시오.
<울>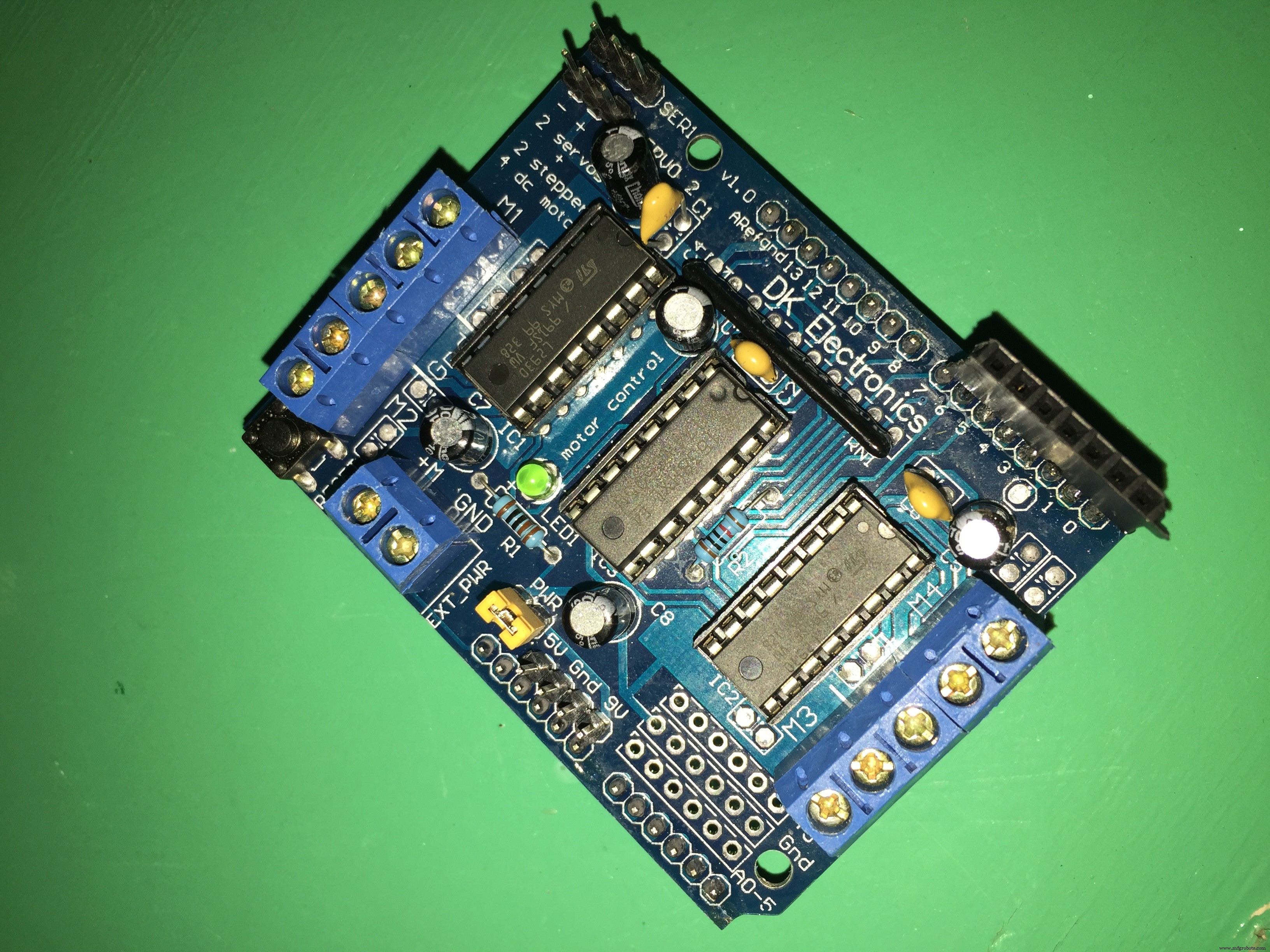 <울>
<울> Arduino 핀을 사용할 수 있도록 실드 상단에 일부 핀 헤더를 납땜할 수 있습니다.
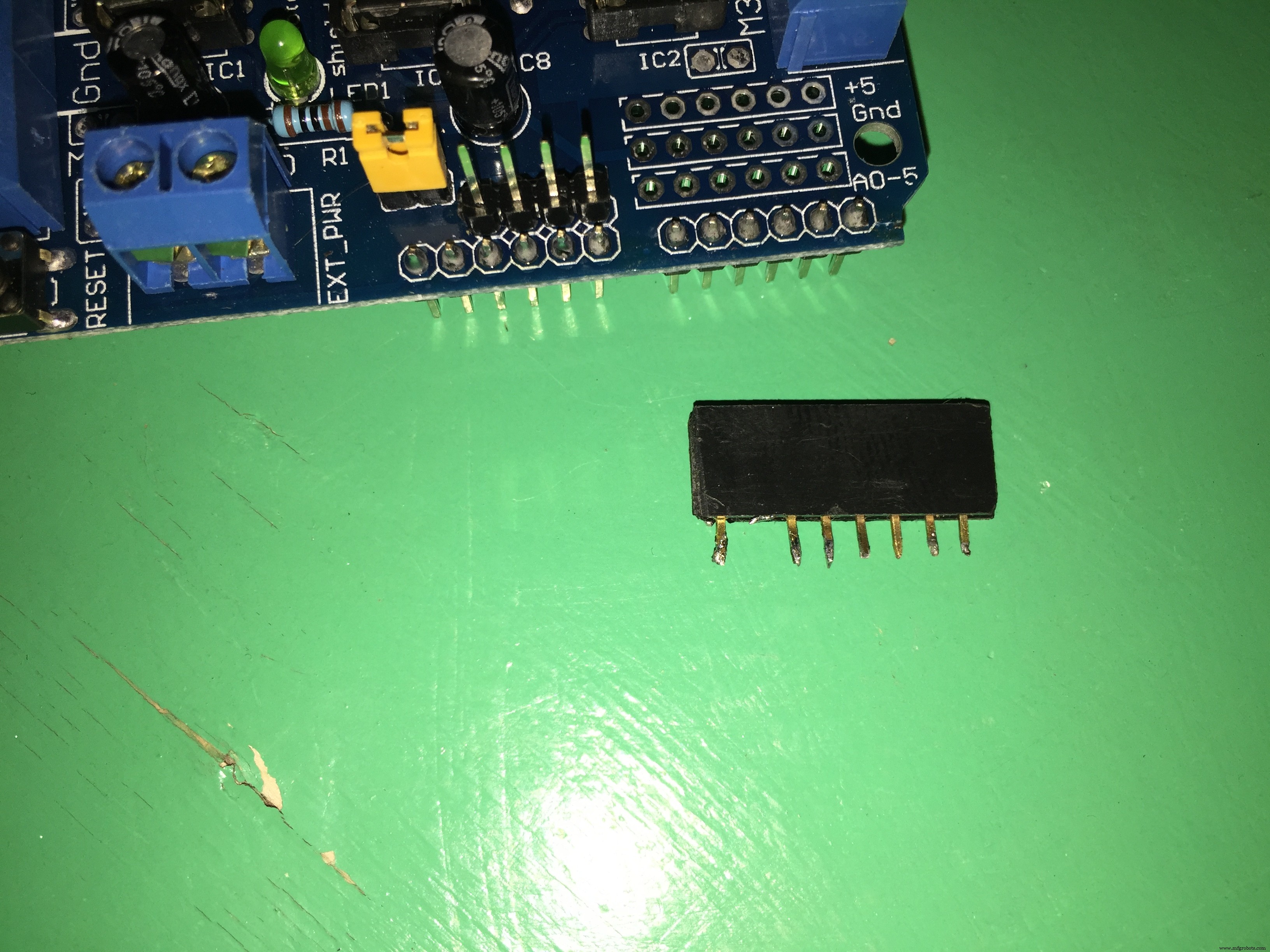

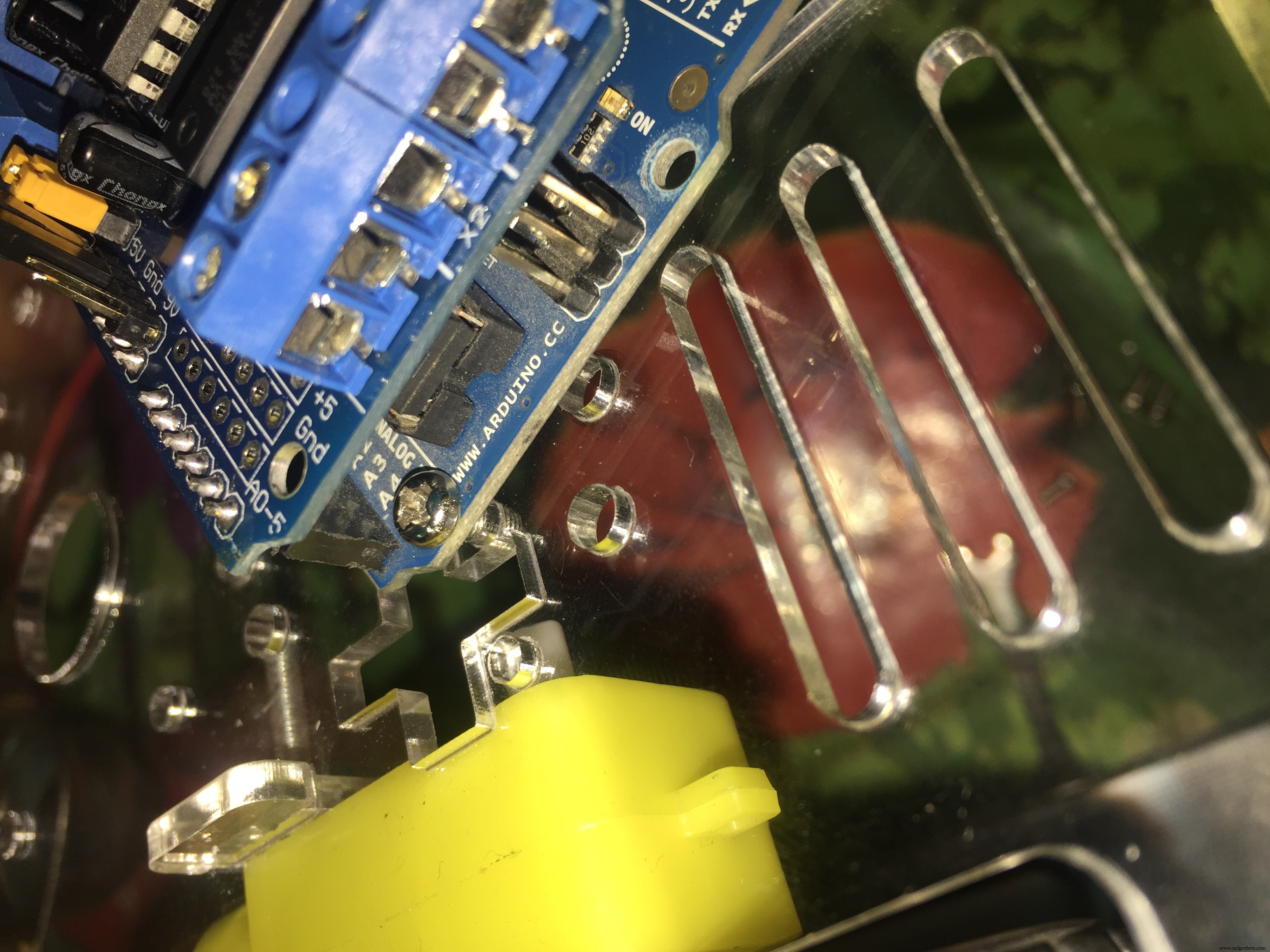
다음과 같이 Arduino 보드 위에 모터 실드를 부착해야 합니다.
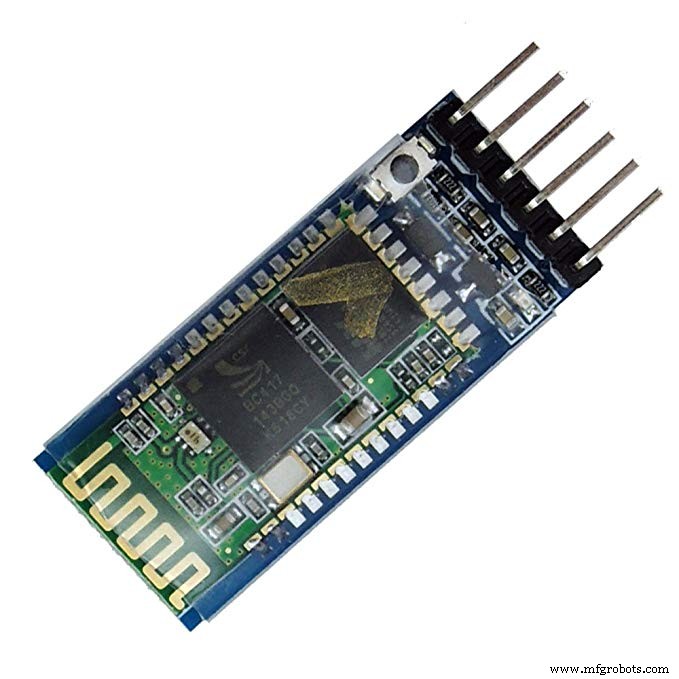
블루투스 모듈 :조종사와 로봇 사이에 명령을 내리고 조치를 취하는 채널입니다.
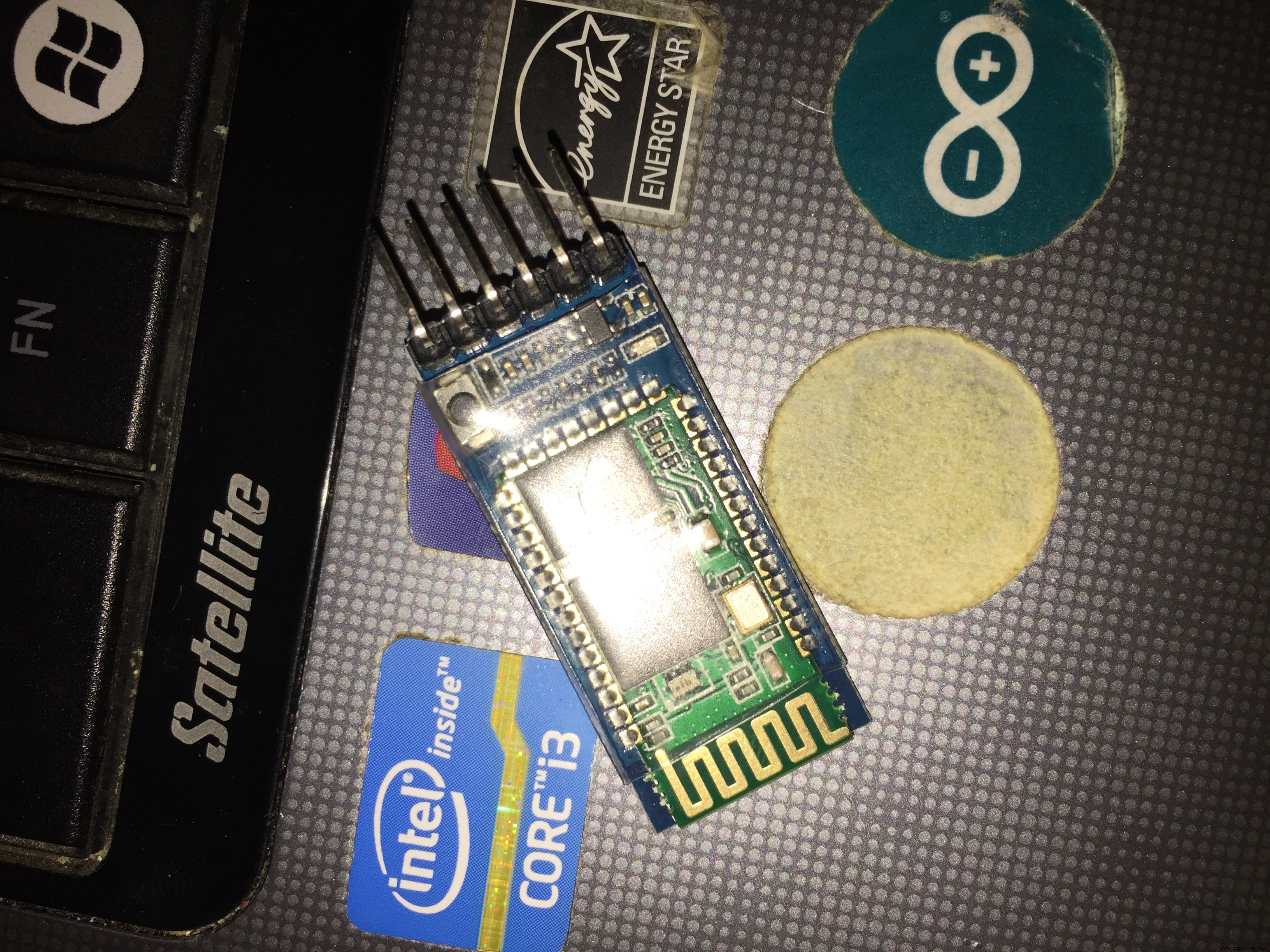
6개의 핀이 있습니다. 중간 4개의 핀(RX-TX-GND-+5)만 사용합니다.

연결합니다:
<울>
참고:왜 Rx에서 Tx로, Tx에서 Rx로?
블루투스 모듈이 데이터(Tx)를 보내고 아두이노가 이 데이터(Rx)를 받기 때문입니다.
하나는 보내고 다른 하나는 수신
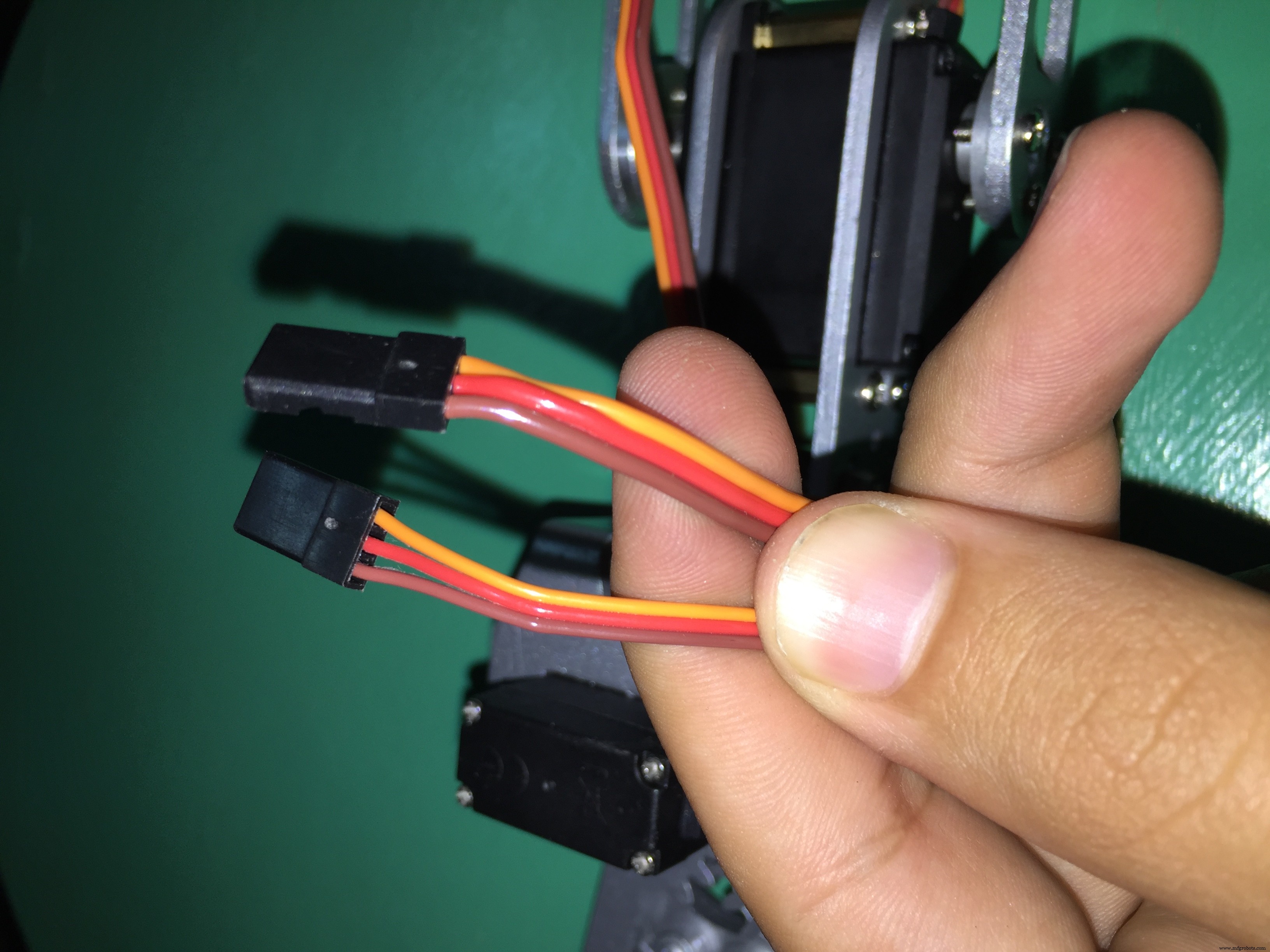
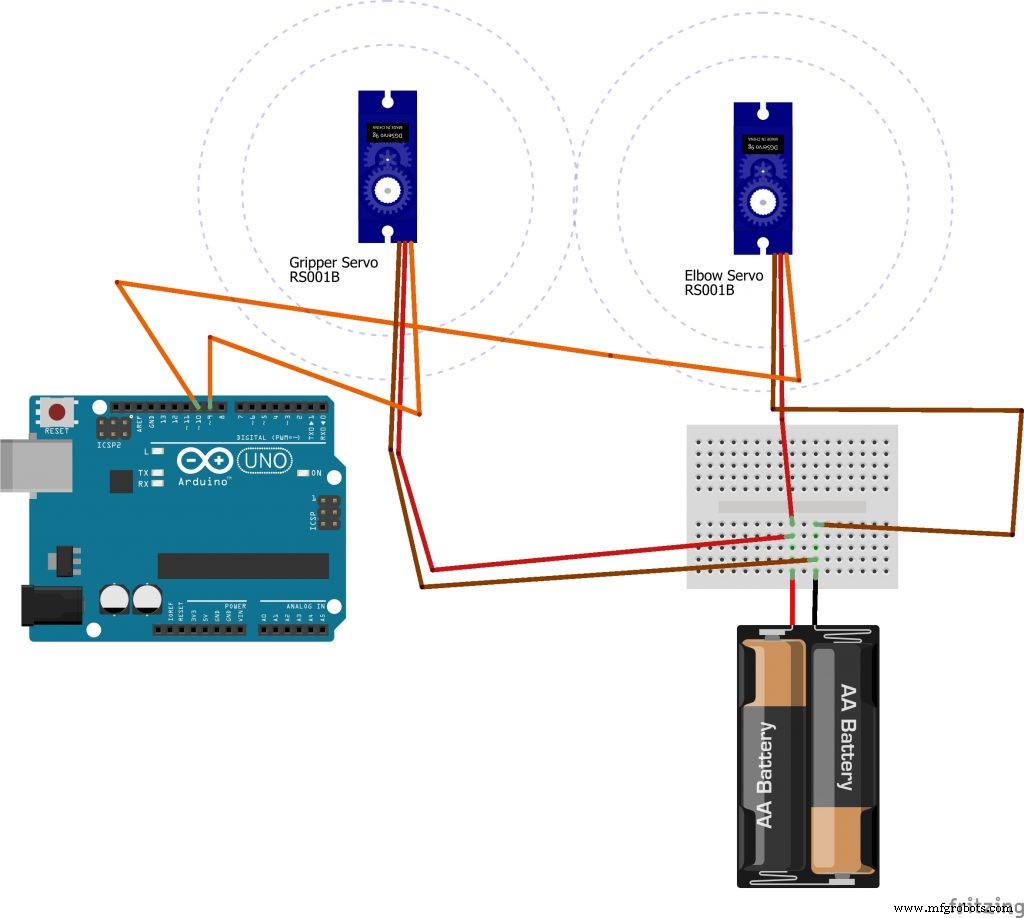
4) 서보 모터에는 빨간색(Positive), 갈색(Negative), 노란색 또는 주황색(Signal)의 3선이 있습니다.
참고:수행 서보 모터의 양극과 음극을 Arduino 보드의 5V 및 GND에 연결하지 마십시오. Arduino 보드는 불을 피우다 모터에 의해 흡수되는 높은 전류로 인해; 사용 외장 배터리.
 <울>
<울> 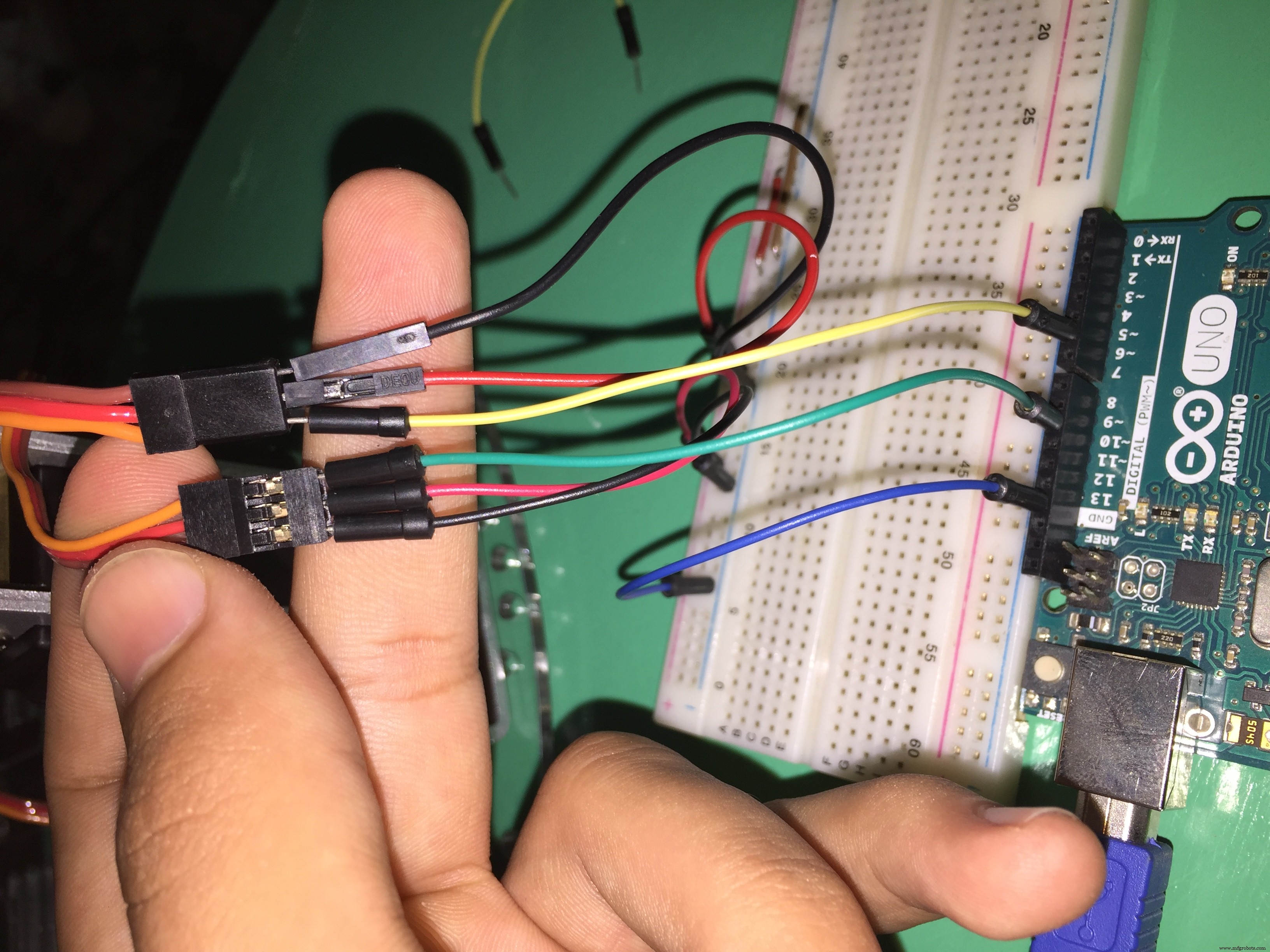
참고:배터리의 GND와 Arduino의 GND를 공통으로 만드는 것을 잊지 마십시오. 각 GND를 서로 연결하여 만드십시오.
5) DC 모터
이 모터를 사용하려면 모터 단자에 일부 와이어를 납땜해야 합니다.
DC 모터에는 극성이 없습니다. 긍정도 부정도 없습니다. 모터 연결을 반대로 하면 모터의 이동 방향이 바뀝니다.

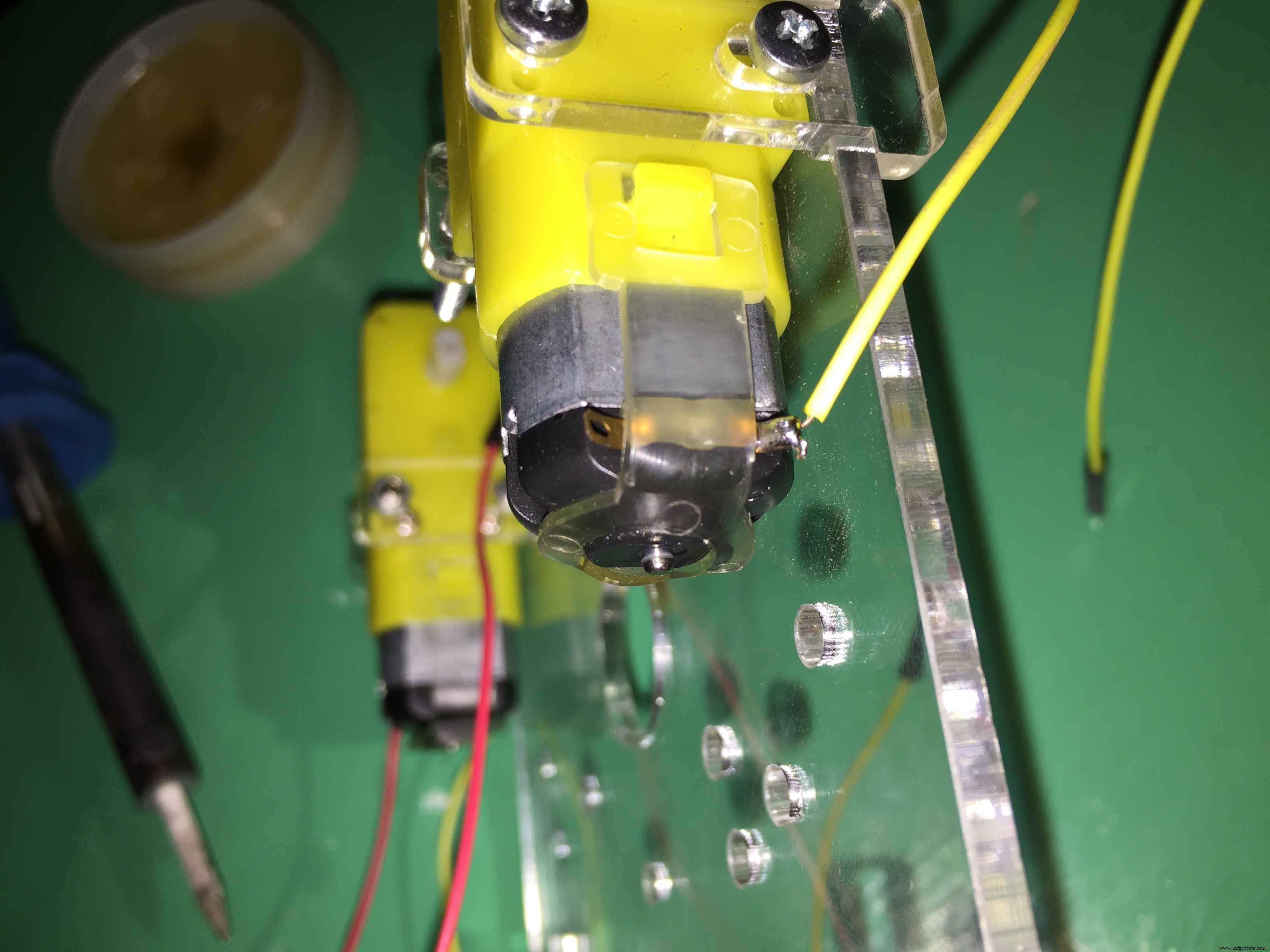
모터 단자를 납땜한 후 이 단자를 모터 실드에 연결합니다.

참고: tArduino 코드, 나는 모터 1 및 모터 2 사용 - 모터 3 및 모터 4가 아닙니다.
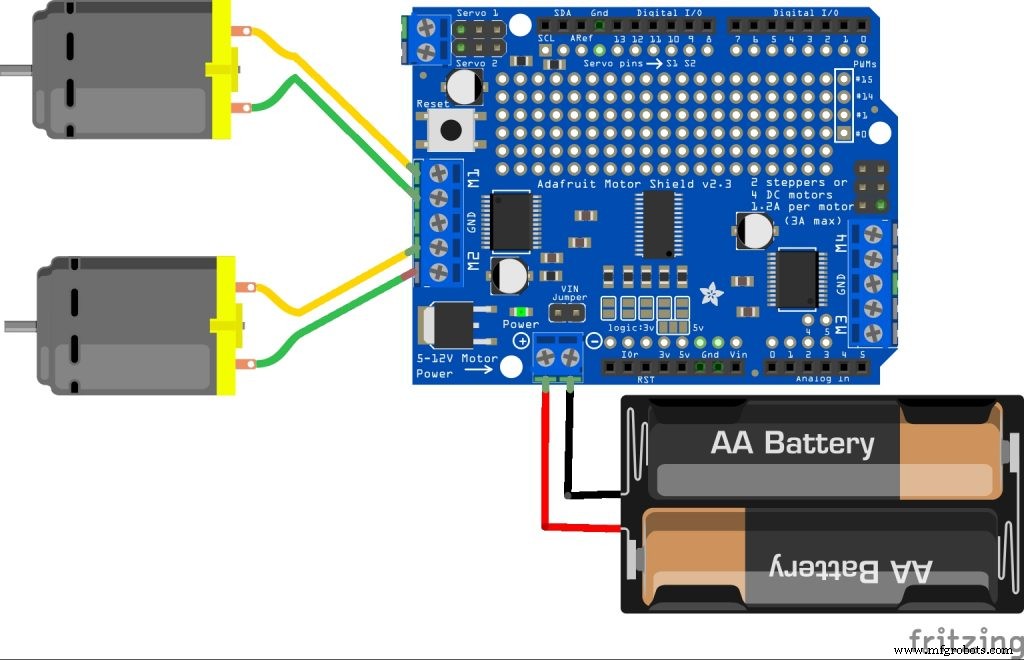
도식
모터 드라이버로 로봇 모터와 배터리를 연결하는 방법.
아두이노 보드에 Arm 서보 모터와 배터리를 연결하는 방법.
블루투스 모듈을 아두이노 보드와 연결하는 방법
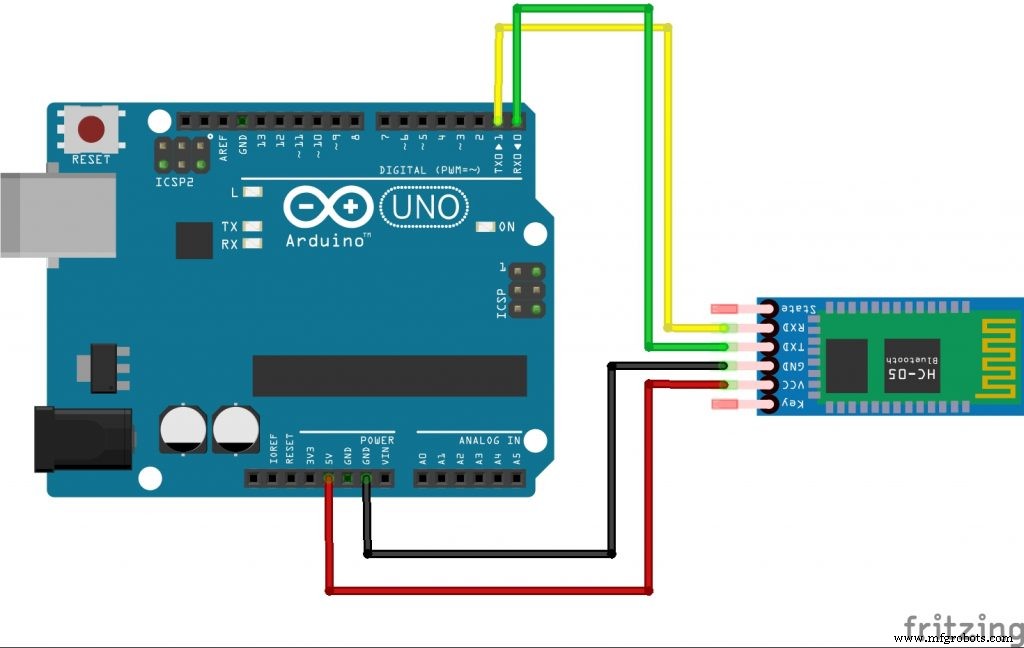
참고:Arduino 보드에 코드를 업로드하는 동안 블루투스 모듈을 분리(RED WIRE +5 핀 제거)하십시오. 그런 다음 업로드 프로세스가 완료된 후 다시 연결하십시오.
#include#include AF_DCMotor motorR(1);AF_DCMotor motorL(2);서보 엘보우서보;서보 그리퍼서보;int 명령; 무효 설정() {gripperServo.attach(9); ElbowServo.attach(10);Serial.begin(9600);motorR.setSpeed(255);motorL.setSpeed(255);}void 루프() {명령 =Serial.read(); /* ARM 코드 */if(command>=1 &&command <=180) //mob 앱의 엄지 위치에 따라 팔꿈치 서보가 0 - 180 사이에서 이동합니다.{elbowServo.write(command);}else if ( command ==205) //그리퍼를 각도 0으로 이동{gripperServo.write(0);}else if (command ==206) //그리퍼를 각도 90으로 이동{gripperServo.write(90); }else if (명령 ==207) //그리퍼 각도 180으로 이동{ gripperServo.write(180);} /* CAR CODE */ else if (명령 ==200){ motorR.run(FORWARD); motorL.run(FORWARD);}else if(명령 ==201){ motorR.run(FORWARD); motorL.run(뒤로); }else if(명령 ==202){ motorR.run(RELEASE); motorL.run(릴리스); }else if(명령 ==203){ motorR.run(뒤로); motorL.run(앞으로); }else if(명령 ==204){ motorR.run(뒤로); motorL.run(뒤로); }else if(명령 ==0){ motorR.run(RELEASE); motorL.run(릴리스); }}
제조공정
픽 앤 플레이스 애플리케이션은 공장 및 컨베이어 시스템만큼 오랫동안 사용되어 왔습니다. 한 곳에서 다른 곳으로 제품을 이동하는 이러한 작업은 인간 작업자에게 지루하고 무미건조하며 반복적인 이동으로 인해 부상을 입을 수도 있습니다. 그런 다음 픽 앤 플레이스 로봇이 등장하여 문제를 해결했습니다. 여러 산업, 특히 속도가 필수인 식품 산업에서 로봇으로 픽 앤 플레이스 애플리케이션을 자동화하기 시작했습니다. 식량에 대한 수요가 오늘날 세계에서 이보다 더 높은 적은 없었습니다. 이것이 픽 앤 플레이스 로봇 시스템이 많은 식품 생산 라인의
Universal Robots Pick and Place 협업 로봇 암은 참여하는 모든 생산 라인에 놀라운 재능을 제공합니다. 이들은 협업적이고 안전하며 제품 정확도를 높이고 수축률을 줄일 수 있습니다. UR 픽 앤 플레이스 로봇의 장점은 생산성입니다. 그들은 24/7 실행할 수 있으며 휴식이나 수면이 필요하지 않습니다. 자율적으로 실행할 수 있으므로 작업자가 더 중요한 작업에 참여할 수 있습니다. Universal Robots의 협업 픽 앤 플레이스 로봇의 또 다른 큰 장점은 매우 직관적이고 프로그래밍하기 쉽다는 것입니다