

제조공정

산업 제조
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
| × | 1 | ||||
| |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
 |
|
 |
|
면책 조항
컨트롤러 소프트웨어의 두 번째 릴리스입니다. 일부 버그가 수정되고 새로운 메뉴가 구현되었습니다. 이 컨트롤러 이다 아니요 더 오래 지원됩니다. 처음부터 자신의 새로운 납땜 컨트롤러를 구축하려는 경우 사용 가능한 다른 버전의 납땜 컨트롤러를 구축하는 것이 좋습니다. 여기 <엠>. 이 문서의 첫 번째 릴리스에 따라 컨트롤러를 구축했다면 컨트롤러 펌웨어를 업그레이드하십시오. 조정 절차를 한 번 더 수행해야 합니다. 펌웨어 업그레이드
첫째, 아이디어가 있었습니다.
흥미로운 프로젝트를 위해 인터넷을 서핑할 때 손으로 만든 납땜 스테이션 프로젝트가 저에게 큰 감동을 주었습니다. 동시에 프로젝트는 실제로 복잡하지 않고 잘 문서화되었으며 매우 유용했습니다. 컨트롤러 없이 일반 납땜 인두를 사용했는데 일반 인두와 이 인두의 차이를 상상할 수 없었습니다. 그래서 그것을 사용해 보기 위해 자체 컨트롤러를 만드는 것은 기발한 아이디어였습니다.
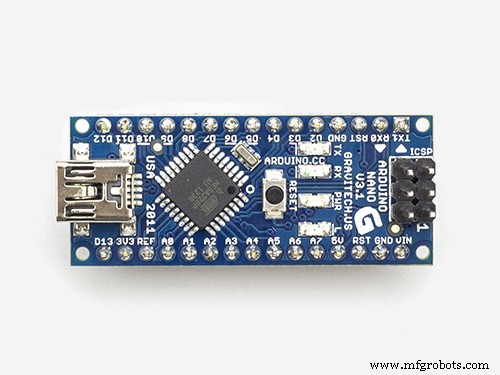
내가 직면한 첫 번째 문제는 납땜 인두 위에 구축된 커넥터였습니다. 거의 사용하지 않아 소켓을 찾을 수 없었으므로 납땜 인두의 특성에 맞는 다른 한 쌍의 커넥터를 사용했습니다. 이 커넥터는 아래 구성 요소 목록에 언급된 항공 플러그 GX16-5입니다. 모든 구성 요소가 우편으로 배달되면 나만의 납땜 컨트롤러를 만들 수 있습니다.
내 컨트롤러의 주요 기능은 다음과 같습니다.
<울>
컨트롤러 메뉴
앞에서 언급했듯이 컨트롤러에는 여러 모드가 있습니다.
<울>컨트롤러의 전원을 방금 켜면 대기 모드가 활성화됩니다. 이 모드에서는 납땜 인두의 전원이 꺼지고 메인 화면에 'OFF'라는 메시지가 표시됩니다. 온도 설정은 때때로 이 모드에서 메인 화면에 표시됩니다(왼쪽 세그먼트의 't.' 기호). 인코더 핸들을 돌려 필요한 온도를 조정할 수 있습니다. 납땜 인두가 이전에 사용된 경우 대기 모드의 표시기가 '냉각 과정'으로 애니메이션되고 LED 막대가 인두의 뜨거운 정도를 나타냅니다. 다리미가 차가워지면 메인 화면에 'C0Ld' 메시지가 표시됩니다.
납땜 인두의 전원을 켜려면 인코더 핸들을 가볍게 누르십시오. 컨트롤러가 메인 모드로 전환됩니다. 이제 컨트롤러는 납땜 인두 온도를 필요한 온도 근처로 유지합니다. 인코더를 회전하여 필요한 온도를 변경할 수 있습니다. 메인 화면은 설정 온도(왼쪽 숫자의 기호 't.') 또는 현재 납땜 인두 온도를 표시합니다. LED 막대 표시기는 공급된 전원을 보여줍니다. 대기 모드로 돌아가려면 인코더 핸들을 살짝 누르십시오.
전원 모드는 주 모드에 있는 동안 인코더를 길게 눌러 켤 수 있습니다. 전원 모드에서 인코더를 회전시켜 수동으로 납땜 인두에 공급되는 전원을 직접 조정할 수 있습니다. 메인 화면에는 다리미의 온도가 표시되고 LED 막대에는 공급된 전원이 표시됩니다. 로터리 엔코더 핸들을 길게 누르면 컨트롤러가 전원 모드에서 메인 모드로 돌아갑니다.
설정 모드로 이동하려면 대기 모드에서 인코더를 길게 누릅니다. 설정 모드에서 구성 매개변수를 조정할 수 있습니다. 이 모드에는 5개의 메뉴 항목이 있습니다:
<울>핸들을 돌려 메뉴 항목을 선택합니다. 선택한 항목을 변경하려면 인코더 핸들을 가볍게 누르십시오. 매개변수를 조정한 후 핸들을 다시 누르면 설정 메뉴로 돌아갑니다. 인코더 핸들을 길게 누르면 대기 모드로 돌아가고 매개변수를 EEPROM에 저장할 수 있습니다. '적용' 항목에서 엔코더를 살짝 눌러 매개변수를 저장할 수 있습니다. 변경 사항을 취소하고 메뉴에서 메인 모드로 돌아가려면 30초 동안 기다리거나 '취소' 항목을 선택할 수 있습니다.
센서 판독값의 주요 스키마 변경
이 컨트롤러의 전기 스키마는 원래의 것과 약간의 변경이 있습니다. 먼저 내 철제 손잡이인 hakko 907은 온도를 측정할 때 열전대가 아닌 열저항기를 사용합니다. 즉, 온도를 읽는 데 사용되는 스키마는 아래 그림과 같이 변경되어야 합니다.
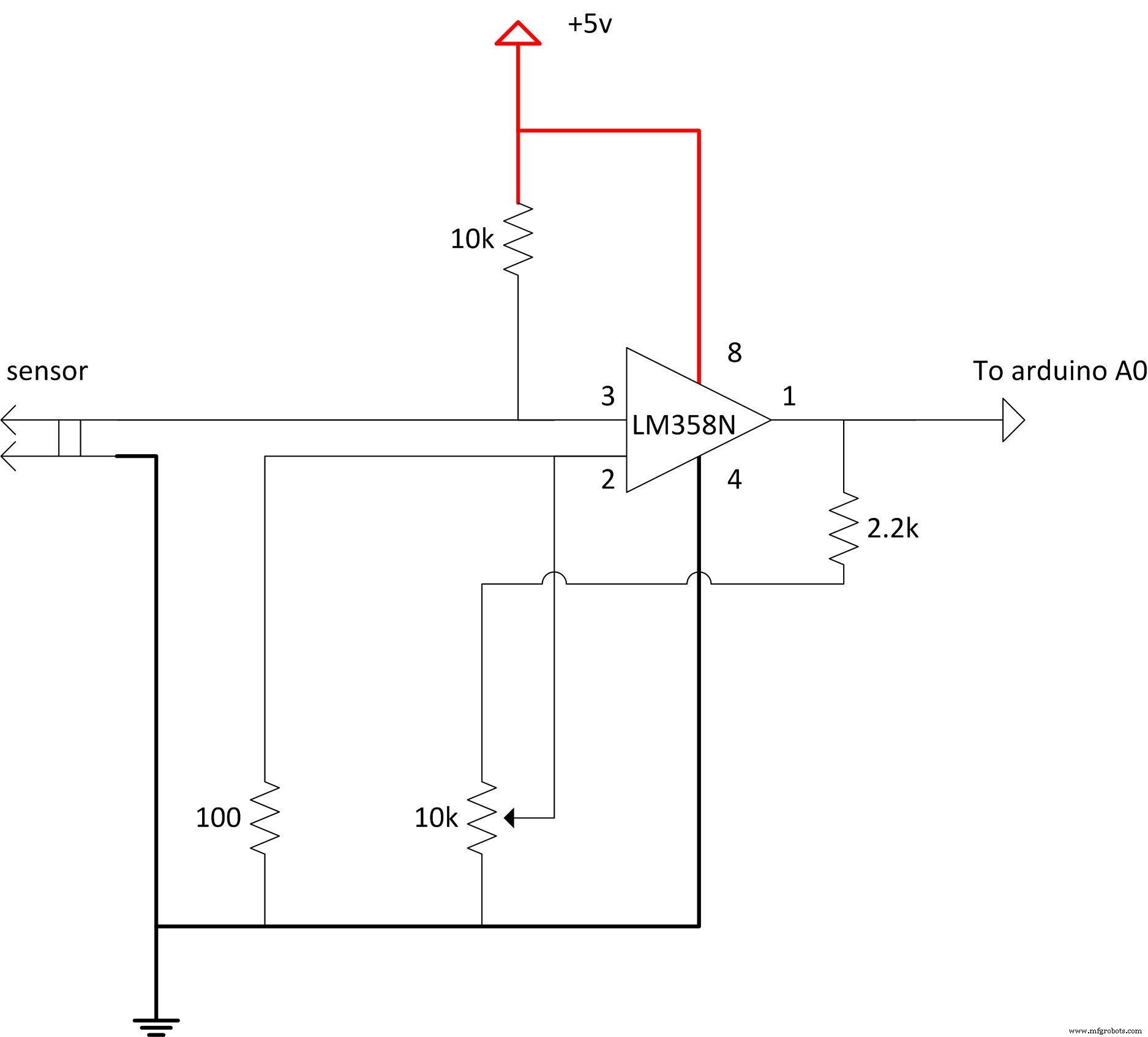
hakko 907 핸들은 센서의 저항이 다릅니다. 추울 때 약 50ohm, 납땜 인두의 온도가 섭씨 400도가 되면 저항이 약 200ohm으로 상승합니다. 아마도 다른 철 손잡이는 다른 매개 변수를 가질 수 있으므로 가변 저항을 사용하여 증폭기 LM358N을 조정하기로 결정했습니다. 이 가변 저항은 다음과 같이 조정되어야 합니다. 다리미가 뜨거울 때 출력 전압은 약 4V가 되어야 합니다(arduino의 A0 핀 판독값은 700).
두 번째 릴리스 참고사항 :앰프 LM358N은 그다지 정확하지 않습니다. 이 증폭기에서는 온도 판독값에 약간의 변동이 있습니다. 새 컨트롤러를 만들려면 을 사용하는 것이 좋습니다. 다른 하드웨어의 버전을 바꾸거나 앰프를 더 정확한 것으로 교체하십시오. 예:ad822, lt1013 또는 lmc6462.
보정 절차를 단순화하기 위해 조정 모드는 컨트롤러 내부에서 구현됩니다. 튜닝 모드는 설정 메뉴에서 실행할 수 있습니다.
교정 절차에는 두 가지 목표가 있습니다. 변수 레지스터를 조정하고 내부 온도 판독값을 섭씨 또는 화씨로 변환하는 공식을 계산하는 것입니다. 납땜 인두 온도는 arduino의 A0 핀을 읽어 내부 장치 0-1024에서 측정됩니다. 내부 온도 단위를 사용하는 것이 편리하지 않으므로 이 단위를 사람이 읽을 수 있는 값으로 변환해야 합니다.
조정 모드
컨트롤러를 보정하려면 외부 온도계가 필요합니다.
조정 모드에서 가변 저항을 조정하고 컨트롤러의 온도 판독값을 보정할 수 있습니다. 프로그램 스케치에서 납땜 인두의 온도 간격은 섭씨 180~400도라고 가정합니다. 프로그램 내에서 상수를 편집하여 이 간격을 변경할 수 있습니다.
조정 메뉴에는 다음 5가지 항목이 있습니다.
<울>상위 및 하위 온도의 센서 판독값을 나타내는 처음 두 메뉴 항목의 숫자. 처음에는 값이 0과 같습니다.
Tune 모드가 활성화되면 최대 및 최소 온도를 설정해야 합니다. 먼저 최대 온도를 설정합니다. 컨트롤러는 이 모드에서 내부 단위로 온도 판독값을 표시합니다. 인코더를 돌려 섭씨 400도를 유지하도록 전원을 조정합니다(외부 온도계 사용). 처음에는 전력을 최대값으로 높여 다리미 가열 속도를 높인 다음 전력을 줄여 온도를 400도로 유지할 수 있습니다.
이제 가변 저항기 핸들 을 회전하십시오. 약 700개 정도의 판독값을 얻습니다. 이 판독값이 최대값이 아닌지 확인하고 가변 레지스터를 회전하여 730-750을 얻은 다음 다시 700으로 돌아갑니다. 컨트롤러가 최대값보다 큰 온도를 측정할 수 있어야 하기 때문에 중요합니다.
가변 레지스터가 조정되면 인코더를 가볍게 누릅니다. 이제 최저 온도인 180도를 조정할 차례입니다. 인코더를 돌려 전력을 줄여 180도의 온도를 유지한 다음 길게 누르십시오. 핸들을 사용하여 변경 사항을 저장하거나 메뉴에서 'APLY' 항목을 선택합니다. 컨트롤러는 섭씨 400도 및 180도에 대한 내부 온도 판독값을 저장합니다. 이 데이터는 내부 온도 판독값을 섭씨(또는 화씨)도로 변환하는 데 사용됩니다.
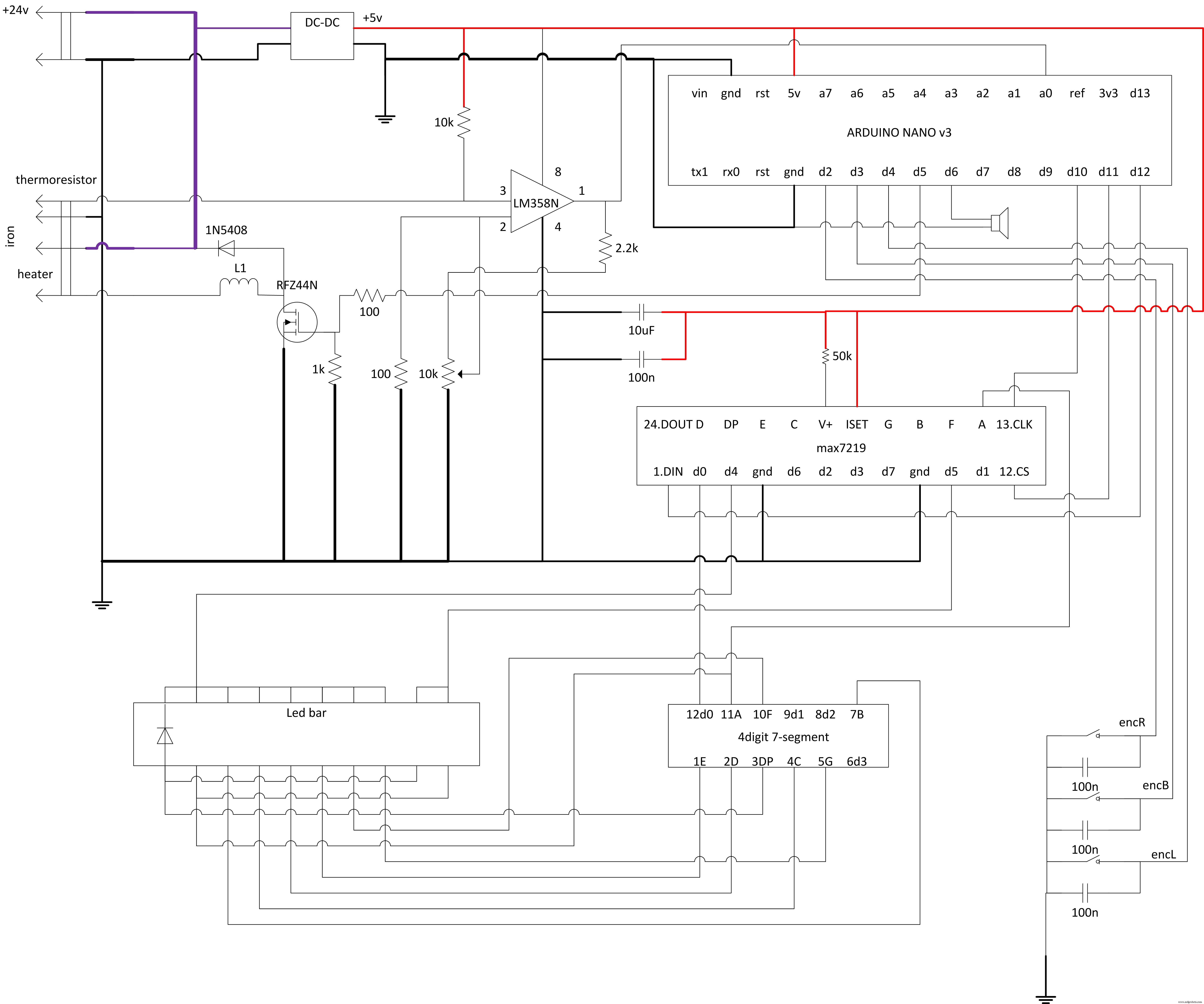
납땜 인두 히터의 사소한 스키마 변경
내 친구는 전원 공급 장치 커패시터의 리소스를 절약하기 위해 또 다른 스키마 변경을 조언했습니다. 아래 그림에서 볼 수 있듯이 스키마는 PWM이 MOSFET 트랜지스터를 활성화할 때 전력 피크를 제한하기 위해 일부 유도성을 구현합니다.

L1 인덕턴스는 1mm 와이어의 12라운드가 있는 직경 약 2cm의 페릿 코어입니다. 다이오드 1N5408은 MOSFET이 닫힐 때 L1 인덕턴스에서 전력을 제거합니다. 이 조언이 전원 공급 장치 리소스를 절약할 수 있기를 바랍니다. 이 유도성은 만들고 싶지 않다면 직선 와이어로 대체할 수 있습니다.
결론
제어된 납땜 인두를 사용하는 것은 큰 기쁨입니다. 빠르게 가열되어 상황에 맞는 온도를 유지합니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
제철을 위한 Matmor 공정 Matmor 공정은 현재 Environmental Clean Technologies Ltd(ECT)에서 개발 중인 제철 공정입니다. Matmor 공정 기술은 특허 기술입니다. 이 기술은 갈탄을 기반으로 하며 독특한 화학 및 용광로 설계로 인해 고급 철광석을 저렴한 대체 원료로 대체할 수 있습니다. 일반적으로 갈탄(갈탄이라고도 함)은 휘발성 물질과 수분 함량이 높기 때문에 야금 용도로 사용되지 않습니다. Environmental Clean Technologies Ltd는 공장, 장비 및 지적 재산(
납땜 온도 조절기 회로 및 작업 전자 애호가라면 납땜 인두 장치에 익숙해야 합니다. 이것은 일반적으로 PCB에 전자 회로를 설계하는 데 사용됩니다. 납땜에 조정 가능한 솔더링 인두를 사용하지 않으면 결국 IC 또는 장치가 손상될 수 있습니다. 납땜 기계의 전압 요구 사항은 전적으로 장치에 사용되는 구성 요소의 납땜 등급에 따라 다릅니다. 예를 들어, 소형 장치 또는 IC에는 5W 전력만 필요하지만 대형 장치에는 25-30W 철이 필요할 수 있습니다. 대형 장치 중 일부는 50와트 이상이 필요하기도 합니다. 납땜 인두는 전력 용