

제조공정

산업 제조
<메인 클래스="사이트-메인" id="메인">
이 튜토리얼에서는 3D 프린터를 사용하지 않고 가능한 한 최소한의 부품으로 가장 간단한 CNC 기계를 만드는 방법을 보여 드리겠습니다. 좋아요. 저는 대부분의 최근 프로젝트에 3D 프린터를 사용하고 있습니다. 물론 3D 프린터로 원하는 모양을 쉽게 만들 수 있기 때문에 프로토타이핑에 적합하기 때문입니다. 하지만 모든 사람이 3D 프린터를 가지고 있는 것은 아니므로 3D 프린터나 다른 CNC 기계의 도움 없이도 물건을 만들 수 있다는 것을 보여드리고 싶었습니다.
다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.
단일 전동 공구, 드릴 및 여러 수공구를 사용하여 이 CNC 기계를 구축한 방법을 보여 드리겠습니다. 이 빌드에 사용한 재료는 8mm MDF 보드로, 실제로는 3D 인쇄된 PLA 재료보다 훨씬 강하고 단단하며 작업하기 쉽습니다.
이 비디오에서는 이 CNC 기계를 레이저 조각기로 사용하고 향후 비디오에서는 펜 플로터로 사용할 계획입니다.

분명히, 이러한 유형의 기계 구성은 많은 강성을 제공할 수 없으므로 CNC 라우터 또는 밀링기로 사용할 수 없습니다. 하지만 더 강력한 레이저를 부착하면 여기에서 사용하는 MDF 보드나 다른 유형의 목재 보드와 같은 다양한 재료를 상당히 좋은 정확도로 절단하는 데 사용할 수 있습니다.
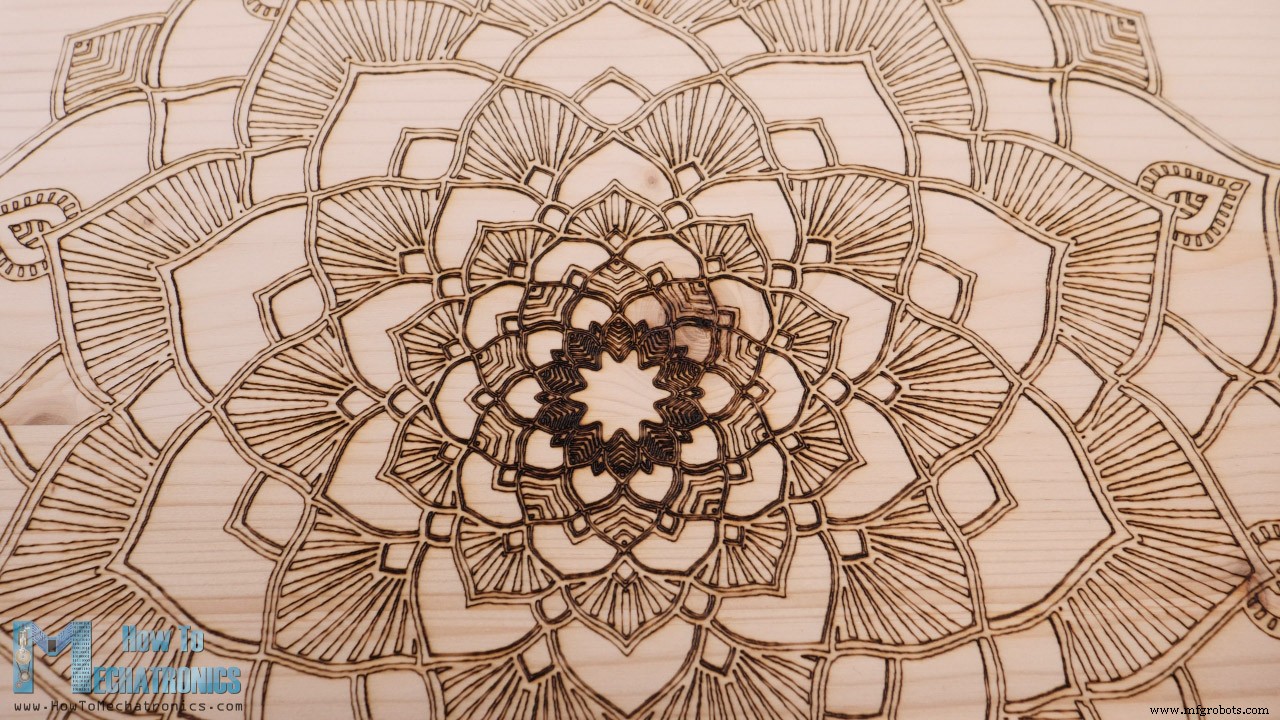
의 작업 영역은 390 x 360mm로 상당히 크며 이 레이저 조각기가 생성할 수 있는 세부 수준은 꽤 인상적입니다. 솔직히 조각이 잘 나와서 놀랐습니다.
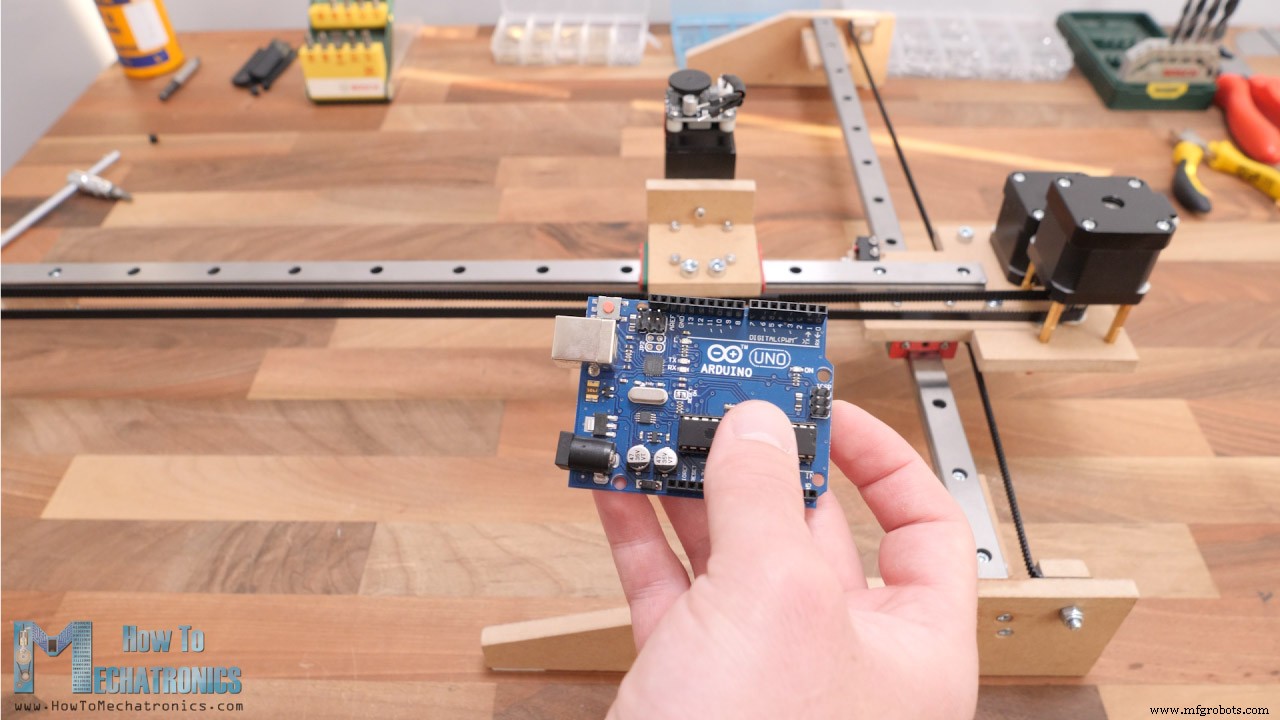
이 CNC 기계의 핵심은 CNC 실드와 결합된 Arduino UNO 보드입니다. 그러나 이에 대한 자세한 내용은 물론 레이저 조각을 위해 도면이나 이미지를 준비하고, G 코드를 만들고, 무료 개방을 사용하여 기계를 제어하는 방법도 있습니다. 소스 프로그램은 비디오에서 조금 뒤에 있습니다.
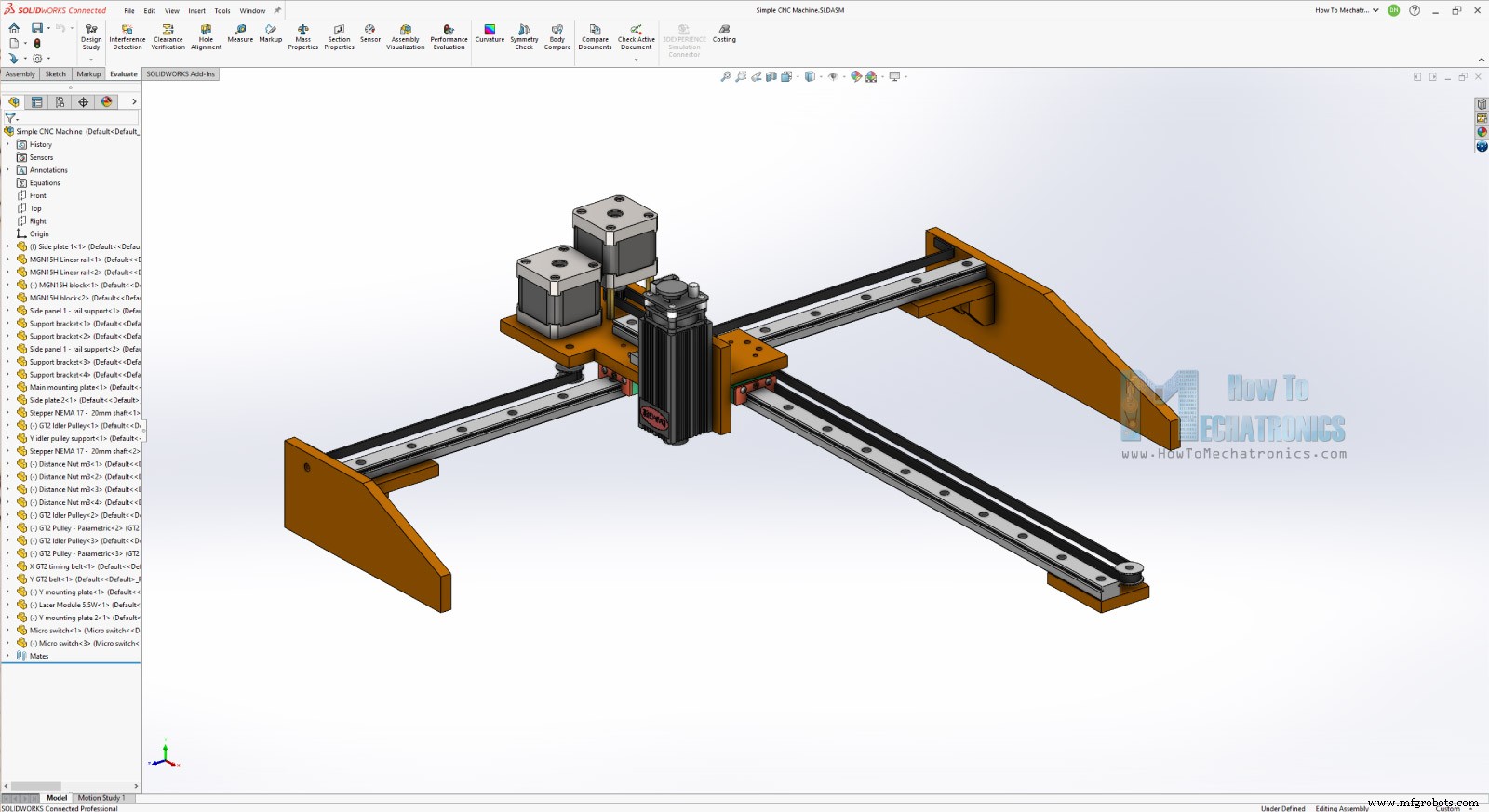
저는 Makers용 SOLIDWORKS를 사용하여 기계를 설계하는 것으로 시작했습니다. 이 CNC 기계의 두 가지 주요 구성 요소는 적절한 슬라이딩 블록과 함께 이러한 MGN15H 선형 레일입니다.
블록 또는 두 개의 축을 구동하기 위해 두 개의 NEMA 17 스테퍼 모터와 일부 적합한 GT2 풀리 및 타이밍 벨트를 사용하고 있습니다. 모든 것을 함께 연결하기 위해 8mm MDF 보드를 사용하고 기계 원점 복귀를 위해 2개의 마이크로 리미트 스위치를 사용합니다.
그리고 그것이 가능한 최소한의 부품으로 CNC 기계입니다.
여기에서 3D 모델을 다운로드할 수 있습니다.
이 3D 모델을 찾아 다운로드할 수 있을 뿐만 아니라 Thangs의 브라우저에서 탐색할 수 있습니다.
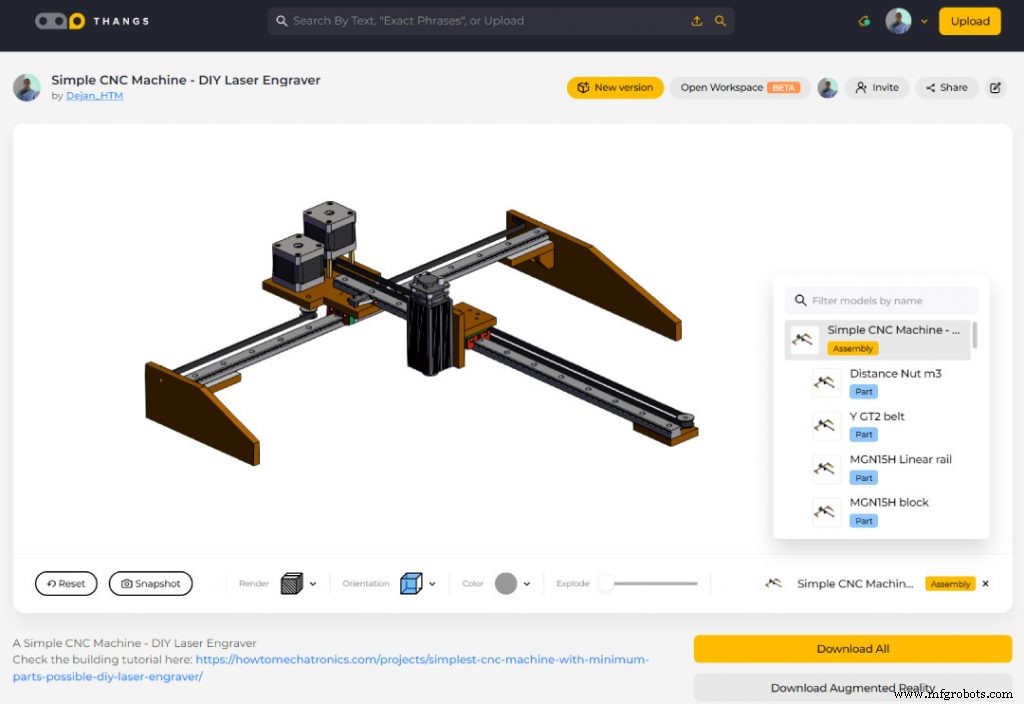
Thangs에서 어셈블리 3D 모델을 다운로드합니다.
이 튜토리얼을 지원해 주셔서 감사합니다.
다음은 중앙 장착 플레이트의 도면입니다.
참조: Arduino CNC 폼 절단기
자, 이제 기계 제작을 시작할 수 있습니다. 다음은 이 DIY CNC 기계를 조립하는 데 필요한 구성 요소 목록입니다. 전자 부품 목록은 아래 기사의 회로도 섹션에서 찾을 수 있습니다.
다음은 제가 사용할 8mm MDF 보드입니다. 3D 모델에서 가져온 도면에 따라 이제 조각을 크기에 맞게 자릅니다.
관련: 자동 도구 교환기가 있는 DIY 펜 플로터 | CNC 드로잉 머신
이를 위해 저는 연필로 잘라야 할 부분을 표시하고 손톱으로 잘라낼 수 있는 가장 간단한 방법을 사용했습니다.

물론 모든 조각을 손으로 자르려면 약간의 노력이 필요하지만 그래도 이 방법으로도 꽤 예쁘고 깨끗하게 만들 수 있습니다.

모든 조각을 크기에 맞게 자르고 나면 구멍을 뚫기 시작했습니다. 구멍을 정확하게 만드는 것은 조각을 자르는 것보다 실제로 더 중요합니다. 구멍 위치는 선형 레일 및 스테퍼 모터와 같이 정확하고 고정된 치수를 가진 다른 부품과 맞아야 하므로 매우 정확해야 합니다.

Y축과 스테퍼 모터가 장착되는 중앙판에는 구멍이 많이 뚫려 있는데, 이를 맞추기 위해 그 부분의 도면을 실제 크기로 출력했습니다.

일반 프린터는 누구나 쉽게 액세스할 수 있으므로 이 프로젝트를 빌드하는 데 프린터를 사용하면 부정 행위가 되지 않을 것입니다. 이러한 방식으로 부품과 도면을 배치하고 구멍의 위치를 표시할 수 있습니다. 그런 다음 구멍을 뚫을 수 있지만 이것이 100% 정확하다는 의미는 아닙니다. 우리는 여전히 수작업으로 일을 하고 있기 때문에 그것들을 바로잡으려면 매우 집중하고 인내해야 합니다.

스테퍼 모터의 구멍을 만들기 위한 3mm 및 5mm 드릴과 25mm 드릴 1개가 필요합니다.
다음으로 X축 레일을 고정할 기계의 베이스 조립을 진행했습니다. 이를 위해 레일 지지 부분을 고정해야 할 위치를 표시하고 베이스 부분에 2개의 구멍을, 지지 부분에 1개의 구멍을 뚫었습니다.

그런 다음 첫 번째 3mm 나사와 약간의 나무 접착제로 이 두 부분을 고정했습니다. 첫 번째 나사를 제자리에 놓고 직각도를 확인한 다음 지지 재료에 두 번째 구멍을 2mm 드릴로 미리 뚫었습니다.
비슷한 방식으로 더 나은 지원을 위해 두 개의 브래킷을 추가했습니다.

솔직히 말해서, 이러한 MDF 부품을 조립하는 이 방법은 그다지 좋지 않습니다. 우리가 하는 모든 것이 손으로 하고 MDF 보드가 이 프로세스를 추가로 복잡하게 하는 8mm 눈금에 불과하기 때문에 정사각형을 만드는 것이 정말 어렵기 때문입니다. 아마도 더 좋고 쉬운 방법은 철물점에서 쉽게 찾을 수 있는 금속 브래킷을 사용하는 것입니다.
그럼에도 불구하고 양면이 준비되면 X축 레일을 설치했습니다.

이 MGN15H 레일은 슬라이딩 블록 내부에 볼이나 롤러가 있기 때문에 매우 매끄럽고 자유로운 움직임을 제공합니다.
설치하기 전에 잘 청소하고 기름칠을 해야 합니다. 양쪽에 두 개의 M3 볼트로 선형 레일을 제자리에 고정했습니다.
다음으로 X축 슬라이딩 블록 위에 Y축을 설치해야 합니다. 이를 위해 중앙 플레이트를 사용합니다.

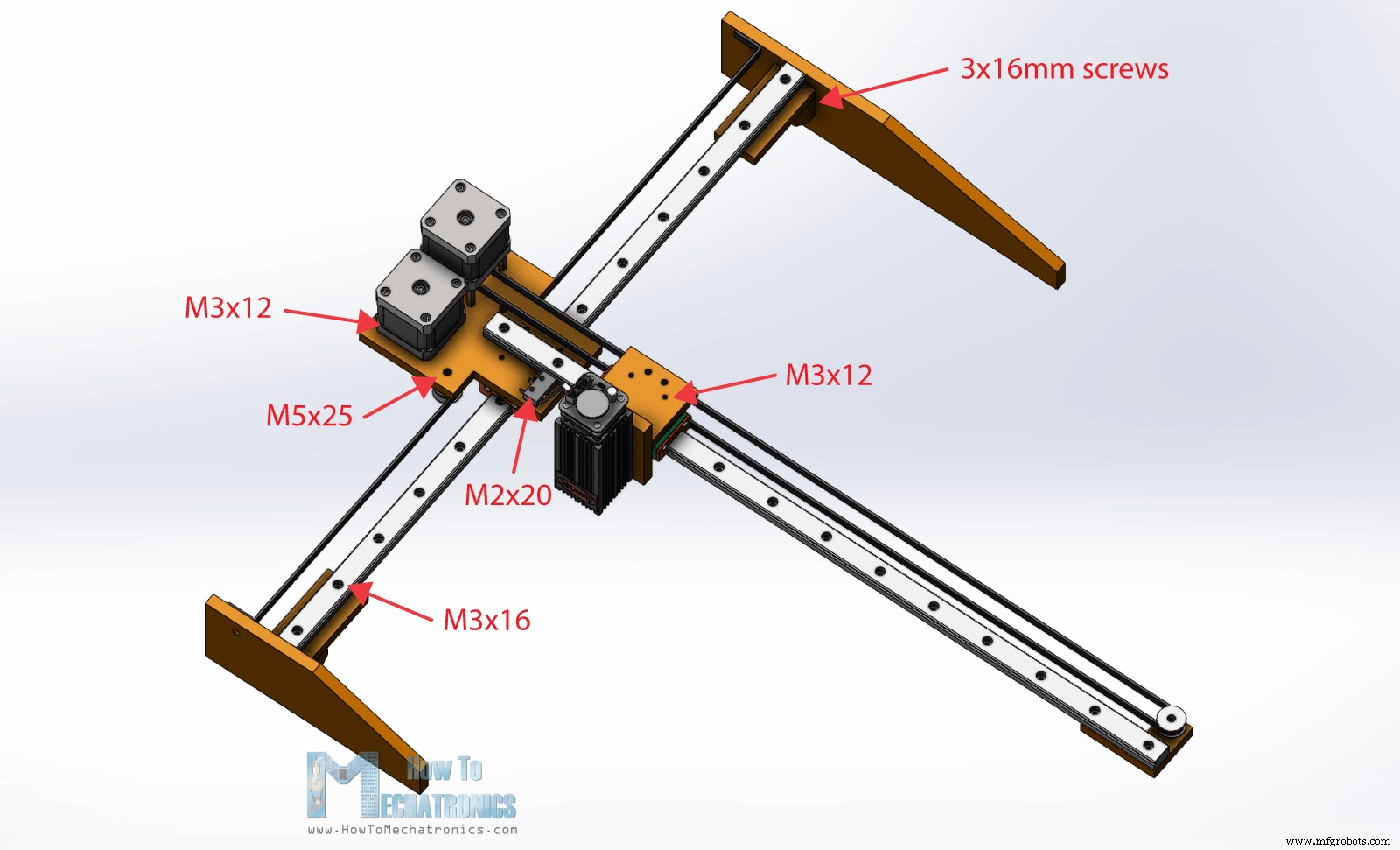
다시 말하지만, 부품을 함께 고정하기 위해 M3 볼트를 사용하고 있습니다. 스테퍼 모터를 제자리에 고정하려면 M3 볼트도 필요합니다.
그 외에도 스테퍼 중 하나의 경우 적절한 장착 높이를 얻기 위해 거리 너트를 사용하고 있지만 이 스테퍼를 플레이트 바닥면에 장착할 수 있으므로 그 거리 너트.
X축 구동을 위해 벨트와 스테퍼 풀리 사이에 적절한 장력을 생성할 수 있도록 스테퍼 샤프트 근처에 두 개의 GT2 아이들러 풀리를 설치해야 합니다.

고정을 위해 M5 볼트와 너트가 필요합니다. Y축의 경우 이 축의 벨트가 루프에 설치되므로 레일 반대쪽에 아이들러 풀리가 하나만 필요합니다.
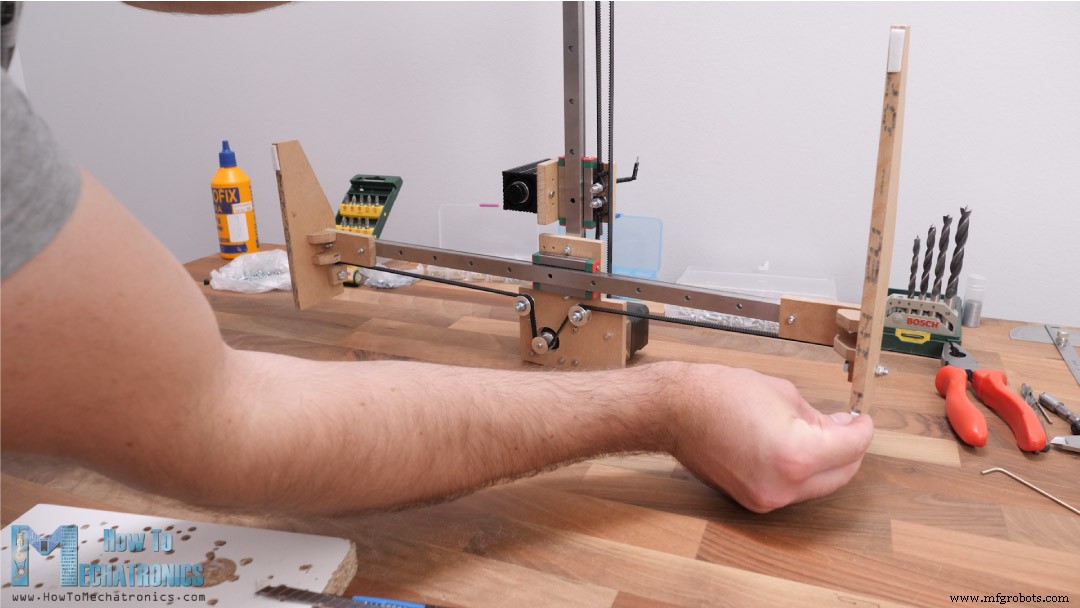
좋습니다. 다음은 결합 또는 X축과 Y축 레일을 함께 연결하는 것입니다. 우리는 4개의 M3 볼트를 사용하여 이를 수행합니다. 이 연결은 전체 기계의 정밀도가 의존하기 때문에 정확하기 위해 매우 중요합니다.

사각자를 이용하여 두 축이 직교하는지 확인하고, 그렇지 않다면 적절히 조정해야 합니다.
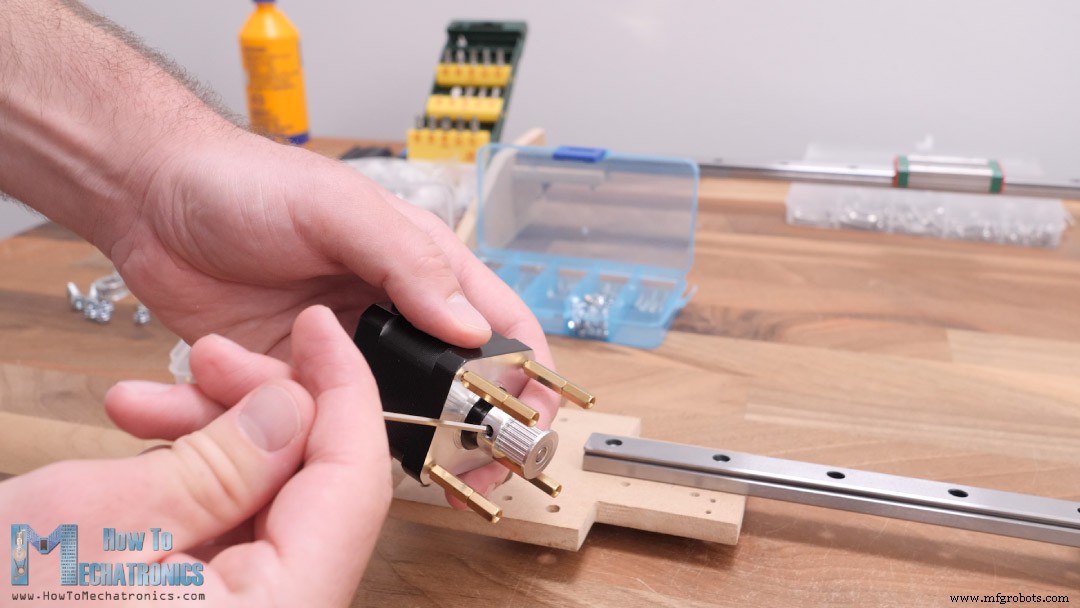
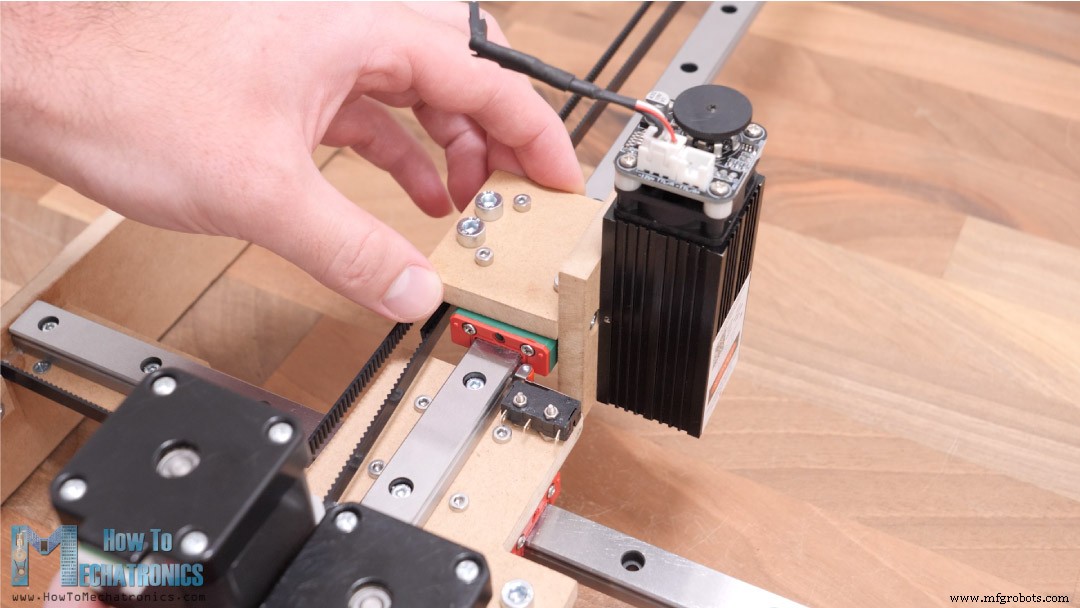
다음으로 Y축 슬라이딩 블록에 들어가는 부품을 설치하고 이 경우 실제로 엔드 이펙터 또는 레이저 모듈을 고정할 수 있습니다. 앞에서 설명한 방법으로 이 부품들을 조립하고 4개의 M3 볼트를 사용하여 슬라이딩 블록에 고정했습니다.
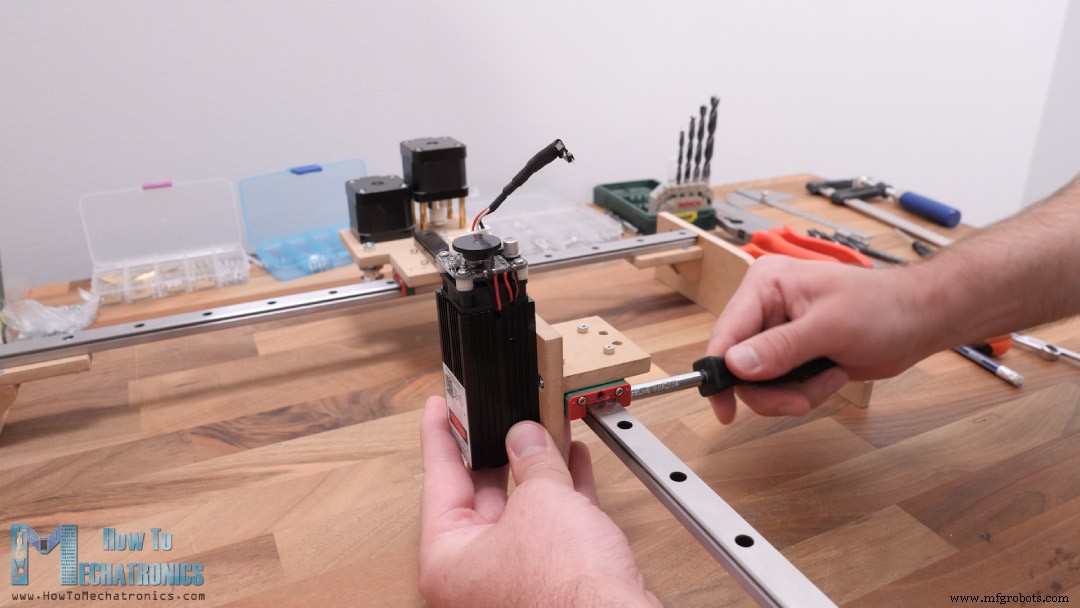
이제 두 개의 M3 볼트로 레이저 모듈을 제자리에 고정할 수 있습니다.
GT2 벨트 설치를 계속했습니다. 필요한 길이를 측정하고 벨트를 사이즈에 맞게 자릅니다.
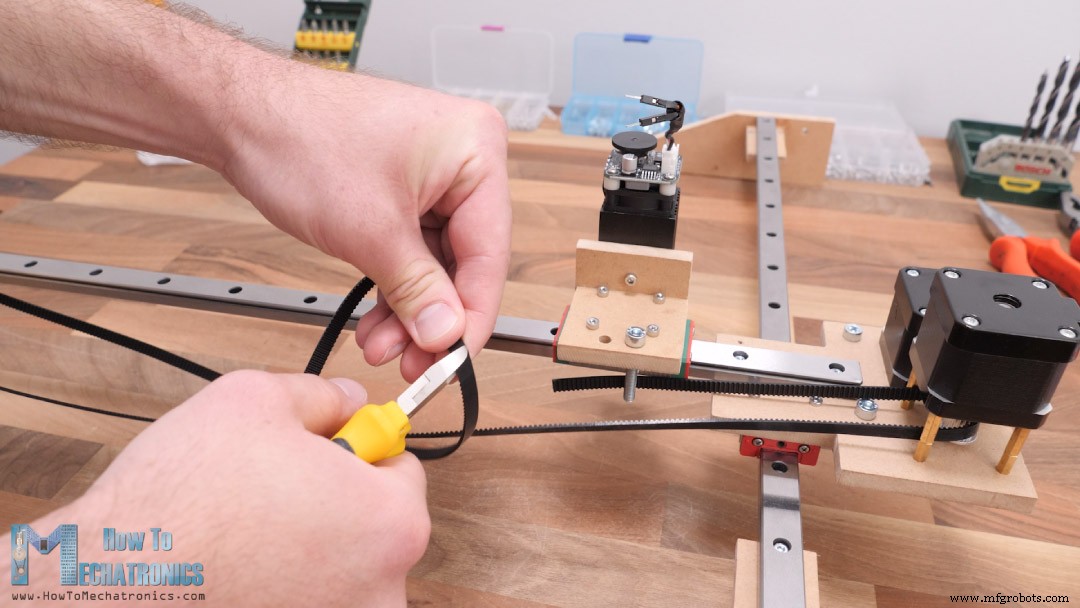
벨트를 슬라이딩 블록에 고정하기 위해 두 개의 M5 볼트와 집타이를 사용했습니다.
벨트의 첫 번째 쪽을 M5 볼트에 집타이로 고정한 다음 반대쪽 벨트에 장력을 가해 두 번째 볼트에 집타이로 고정했습니다.
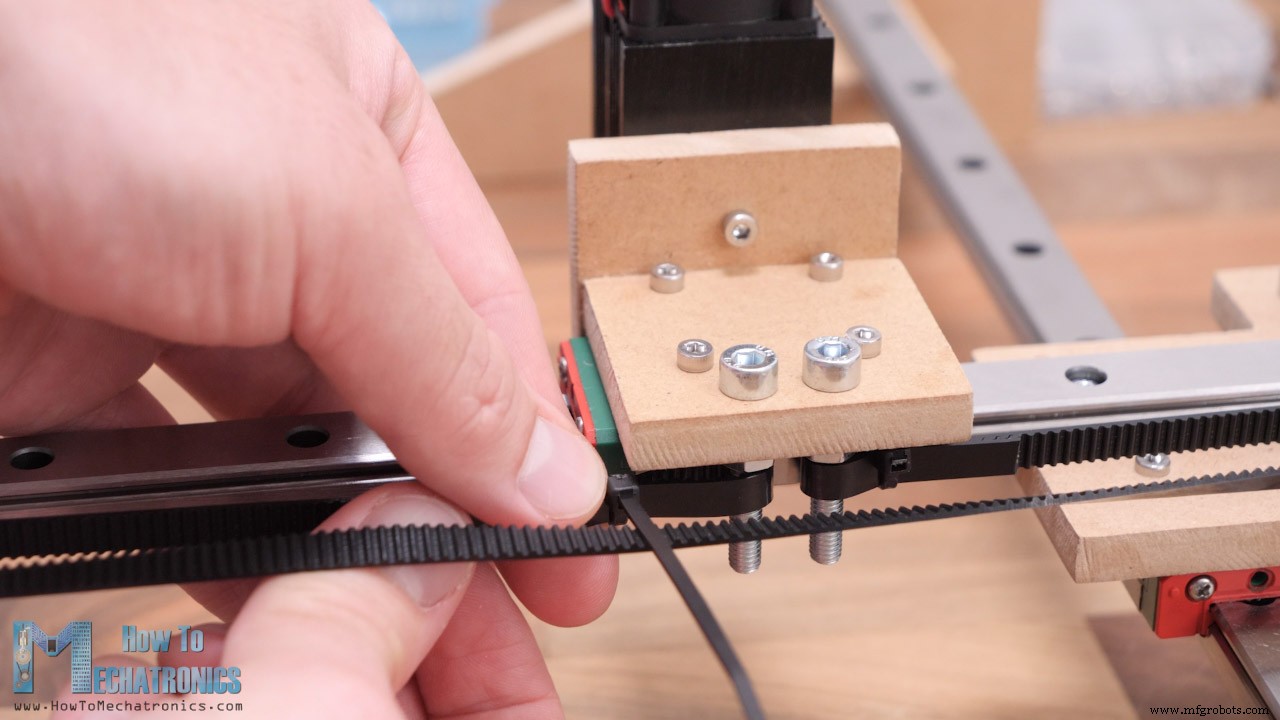
X축의 경우 스테퍼 모터 풀리와 장력 또는 그립을 제공하는 방식으로 3개의 풀리를 통과하면서 벨트가 한쪽에서 다른 쪽으로 일직선으로 늘어납니다.
양쪽에 벨트를 볼트 하나와 사각 MDF 조각으로 고정했습니다.

이것으로 CNC 기계가 거의 완성되었습니다. 몇 가지 더 해야 할 일이 있습니다.
바닥면에는 기계가 제자리에 더 단단히 고정되도록 가구 패드를 접착했습니다.
그런 다음 Y축용 마이크로 리미트 스위치를 설치했습니다. 이를 위해서는 두 개의 M2 볼트가 필요합니다.
X축 리미트 스위치는 중앙판에 구멍을 만드는 걸 깜빡해서 표시를 하고 현장에서 뚫었습니다.
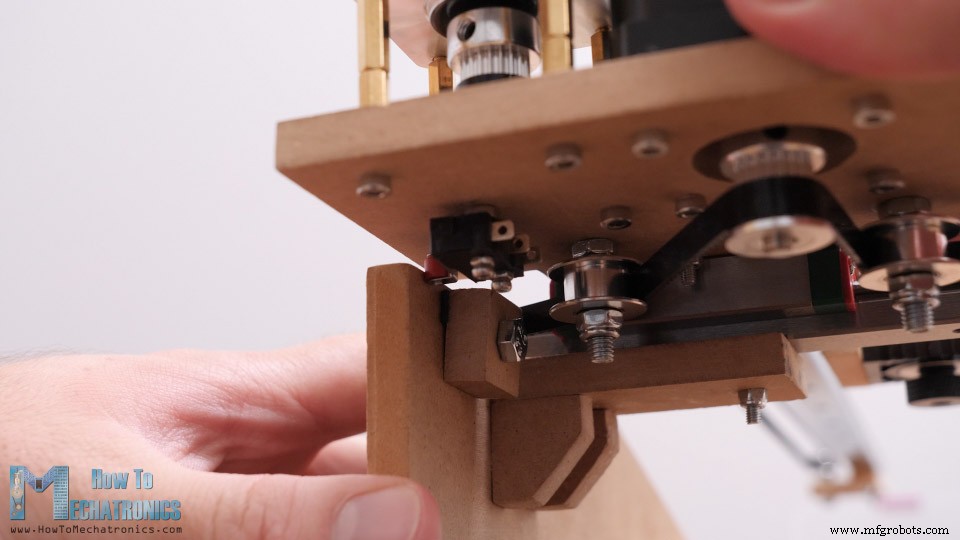
이 리미트 스위치를 제자리에 고정하는 것이 조금 빡빡했지만 결국 잘 나왔습니다.
이제 기계 부품이 완성되었으므로 전자 부품 연결을 계속 진행할 수 있습니다. 앞서 언급했듯이 Arduino UNO 보드를 CNC Shield 및 2개의 DRV8825 또는 A4988 스테퍼 드라이버와 함께 사용합니다.
기계 측면에 아두이노 보드를 고정할 것이므로 두 개의 아두이노 구멍을 표시하고 3mm 드릴로 뚫습니다. 측면 패널과 Arduino 보드 사이에 5mm 거리의 너트를 사용했습니다.
CNC 실드는 단순히 Arduino 보드 위에 있습니다. 가장 높은 스테퍼 해상도가 선택되도록 각 드라이버에 대해 3개의 점퍼를 삽입해야 합니다.
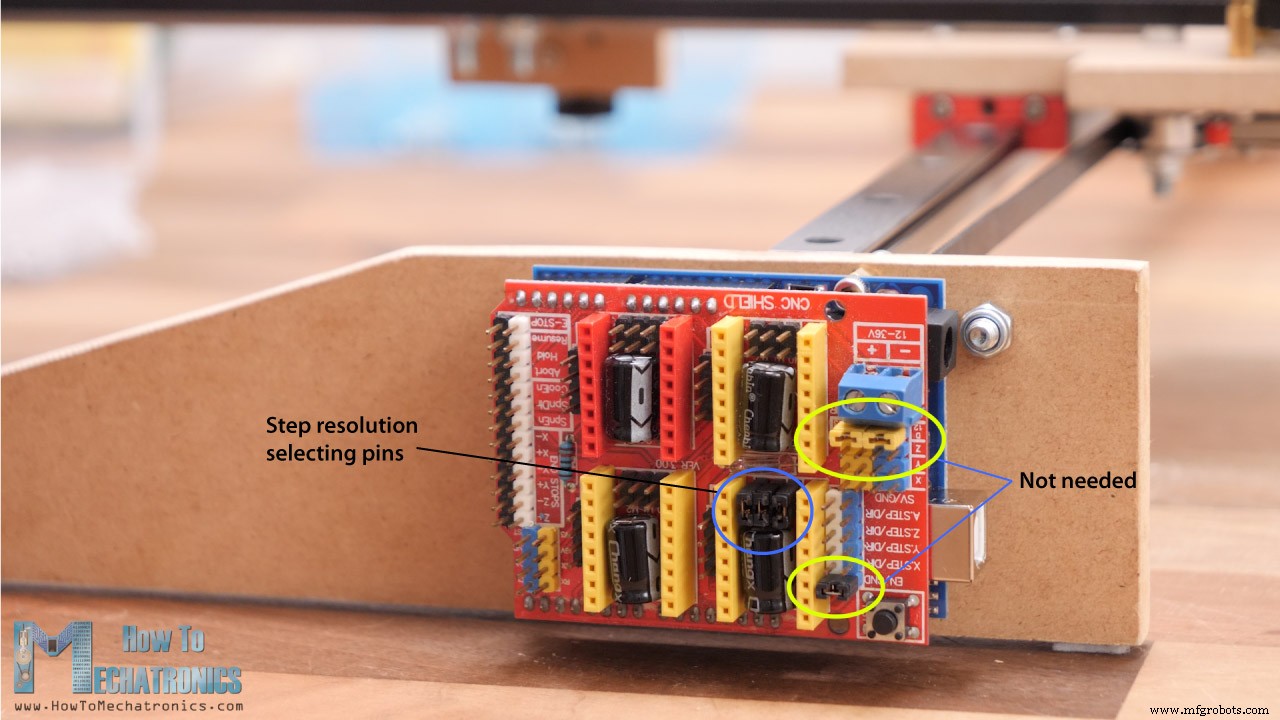
이 세 개의 점퍼는 필요하지 않으므로 제거해야 합니다. 이전 프로젝트 중 하나에서 사용했습니다.
그런 다음 제공된 케이블로 스테퍼 모터를 연결할 수 있습니다. 리미트 스위치를 연결하려면 두 개의 와이어 연결이 필요합니다.
나는 와이어의 한쪽 끝을 엔드 스톱에 직접 납땜하고 다른 쪽에는 암 핀 헤더를 납땜하여 CNC 실드에 쉽게 연결할 수 있습니다.
레이저 모듈을 연결하려면 GND, 12V의 3선과 PWM 제어를 위한 신호선이 필요합니다. 이 와이어는 기계의 가장 먼 지점에 도달할 수 있도록 조금 더 길어야 합니다.
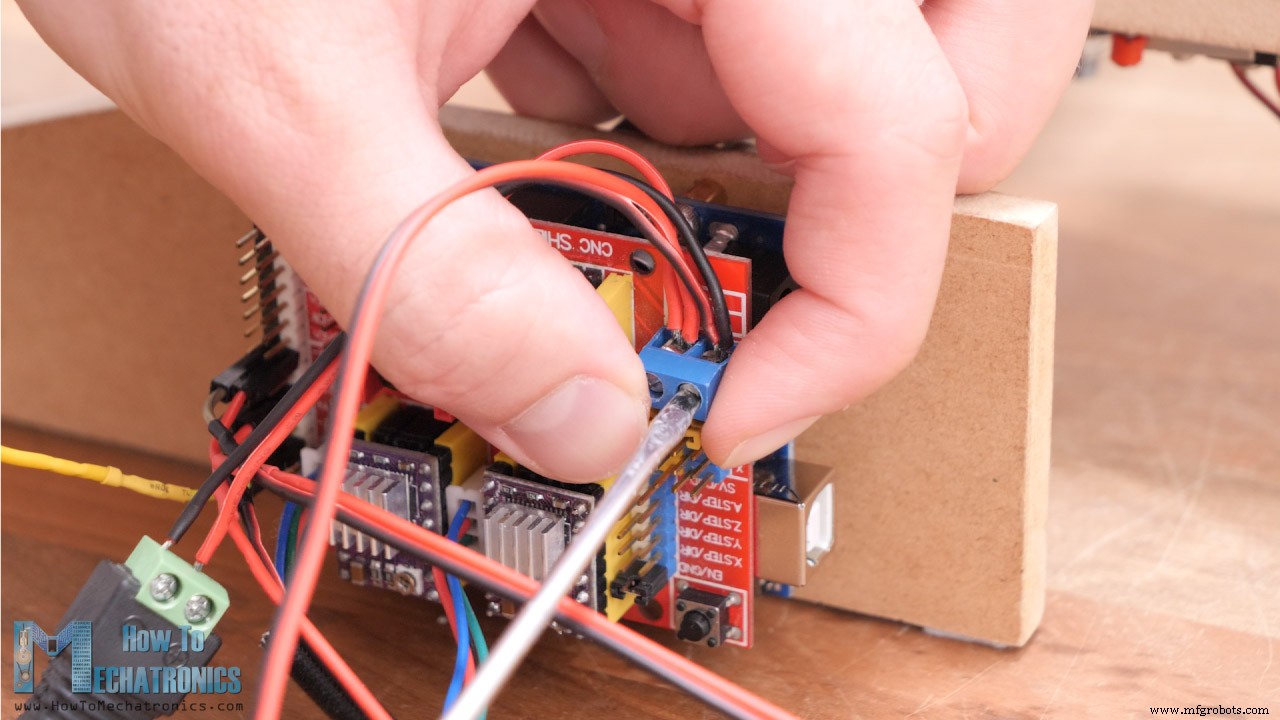
한쪽에는 레이저 모듈에 들어가는 3핀 커넥터가 있고 다른 한쪽에는 CNC 실드의 전원 공급 장치 커넥터와 연결해야 하는 신호 라인에 연결되는 GND 및 12V 와이어가 있습니다. Z+ 또는 Z- 엔드스톱 핀에 연결합니다.
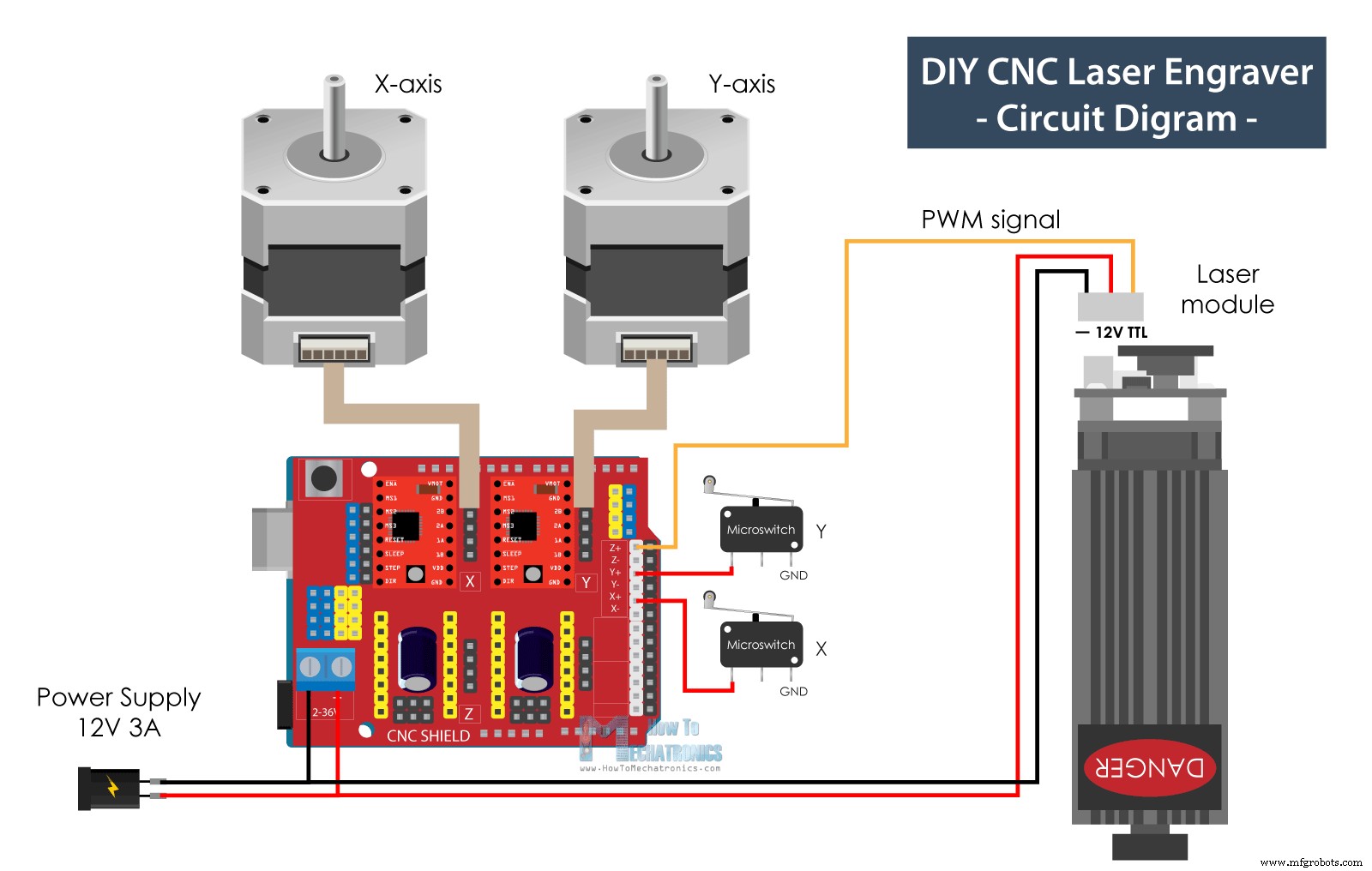
다음은 모든 것이 어떻게 연결되어야 하는지에 대한 회로도입니다.
아래 링크에서 이 프로젝트에 필요한 구성 요소를 얻을 수 있습니다.
따라서 CNC Shield 및 2개의 DRV8825 또는 A4988 스테퍼 드라이버와 함께 Arduino UNO 보드를 사용하고 있습니다. 기계 원점 복귀를 위한 2개의 마이크로 리미트 스위치와 PWM 제어가 가능한 12V 레이저 모듈이 있습니다. 전원을 공급하려면 최소 전류 속도가 3A인 12v 전원 공급 장치가 필요합니다.
이것으로 우리는 실제로 기계 조립을 마쳤습니다. 이제 남은 것은 그것에 생명을 불어넣거나 실제 CNC 기계로 만드는 것입니다. 이를 위해서는 CNC 기계의 움직임을 제어하기 위한 펌웨어를 Arduino에 설치해야 합니다.
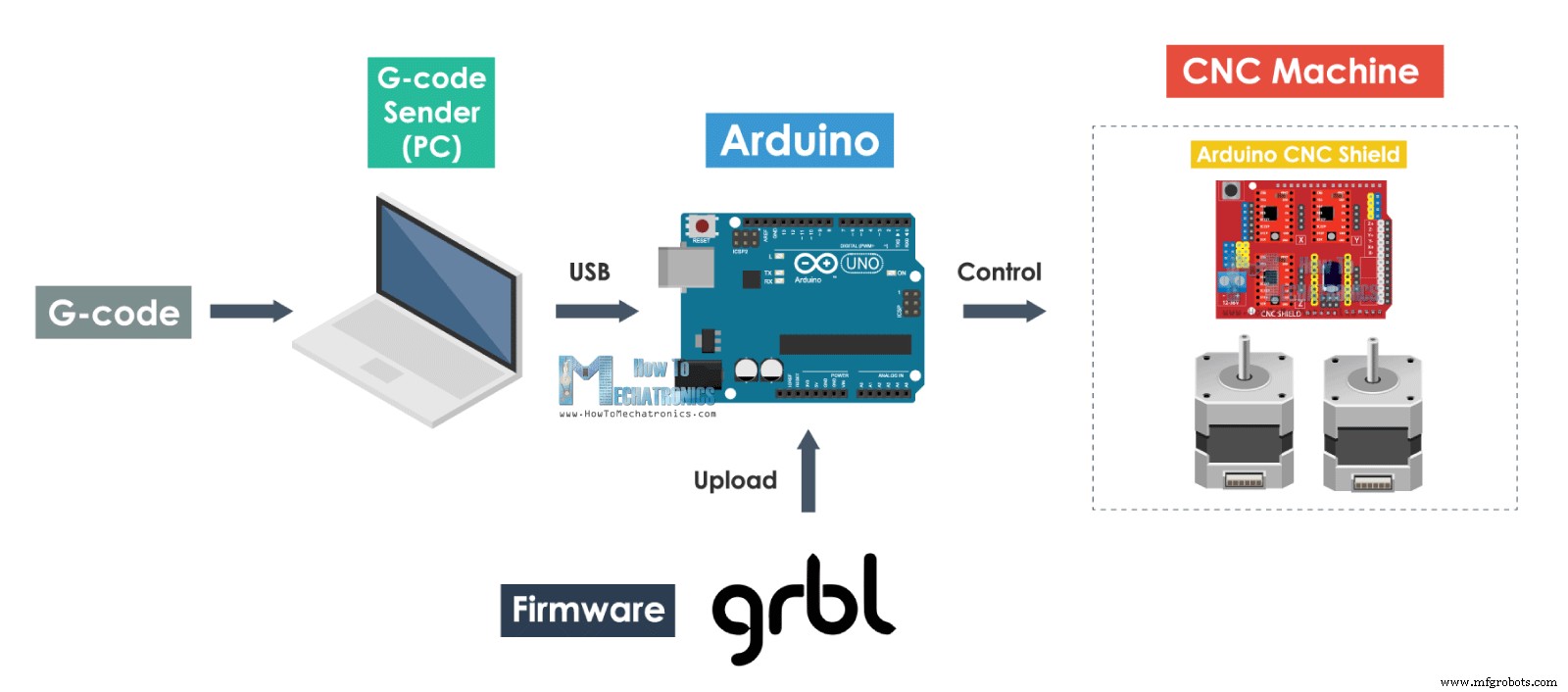
DIY CNC 기계에서 가장 인기 있는 선택은 오픈 소스 GRBL 펌웨어입니다. GRBL 펌웨어 외에도 G 코드를 보내고 기계에 수행할 작업을 지시하는 제어 소프트웨어도 필요합니다. 이 경우 LaserGRBL 컨트롤러를 사용합니다. 이 소프트웨어는 GRBL 펌웨어로 레이저 조각기를 제어하기 위해 특별히 제작되었으며 오픈 소스이기도 하다는 점을 고려하면 정말 놀라운 컨트롤러라고 말씀드릴 수 있습니다.
LaserGRBL을 사용하면 GRBL 펌웨어를 Arduino에 직접 플래시하거나 업로드할 수 있는 옵션이 있으므로 수동으로 할 필요가 없습니다. 우리가 필요로 하는 것과 같이 X 및 Y 원점 복귀만 있는 2축 기계용으로 바로 사용할 수 있는 버전을 선택할 수도 있습니다.

따라서 Arduino를 GRBL 펌웨어로 플래시한 후에는 기계를 컨트롤러에 연결하고 GRBL 구성 창을 열어 기계에 따라 일부 매개변수를 조정할 수 있습니다.
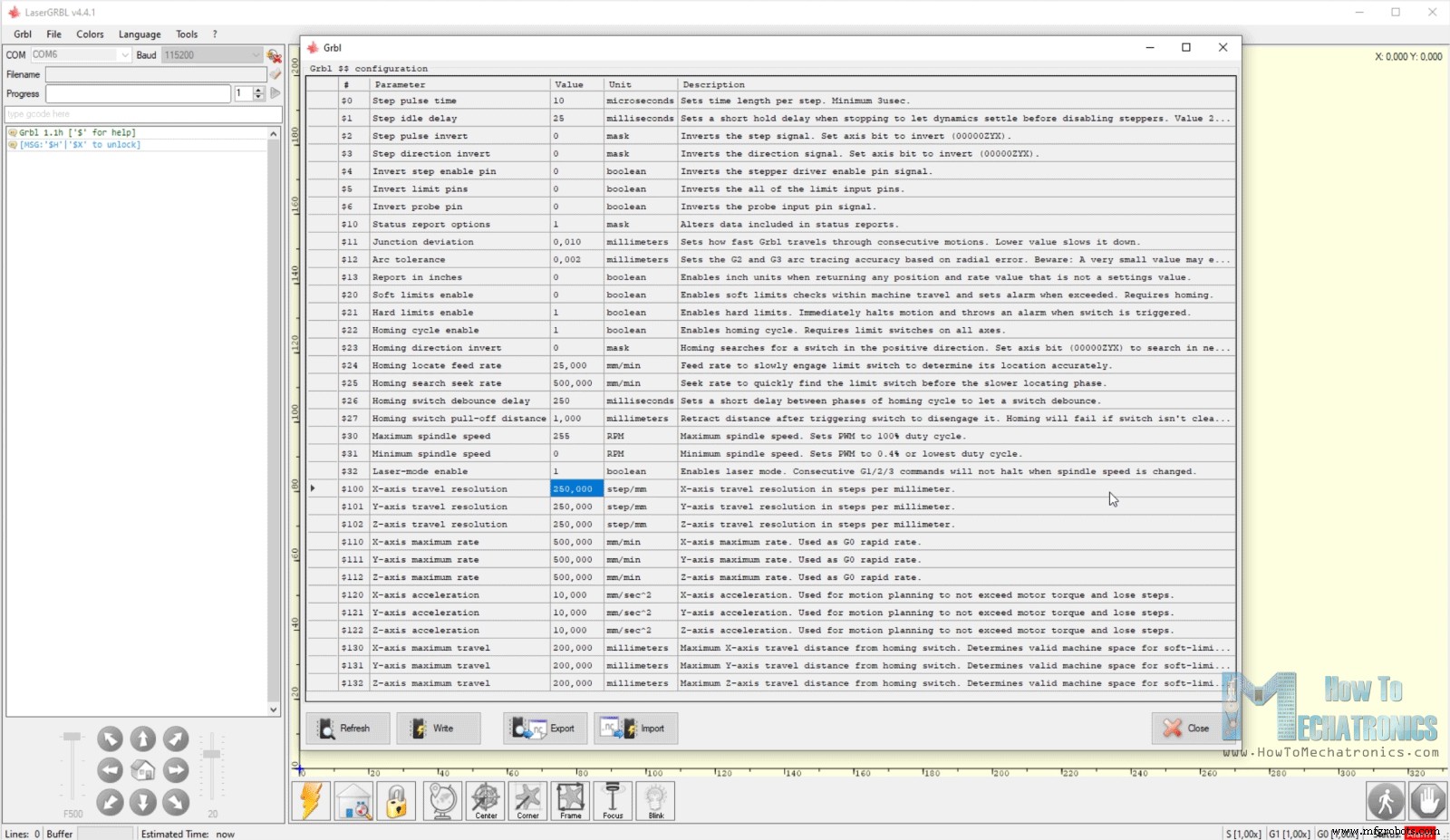
여기서 조정해야 하는 첫 번째 사항은 X 및 Y 축에 대한 이동 해상도 또는 단계/mm 값입니다. 이 값은 모터가 1mm 이동하기 위해 몇 단계를 거쳐야 하는지를 나타냅니다. 이는 보유하고 있는 스테퍼 모터 유형, 선택한 단계 분해능 및 모션 전달(이 경우 GT2 벨트 및 풀리)에 따라 다릅니다.
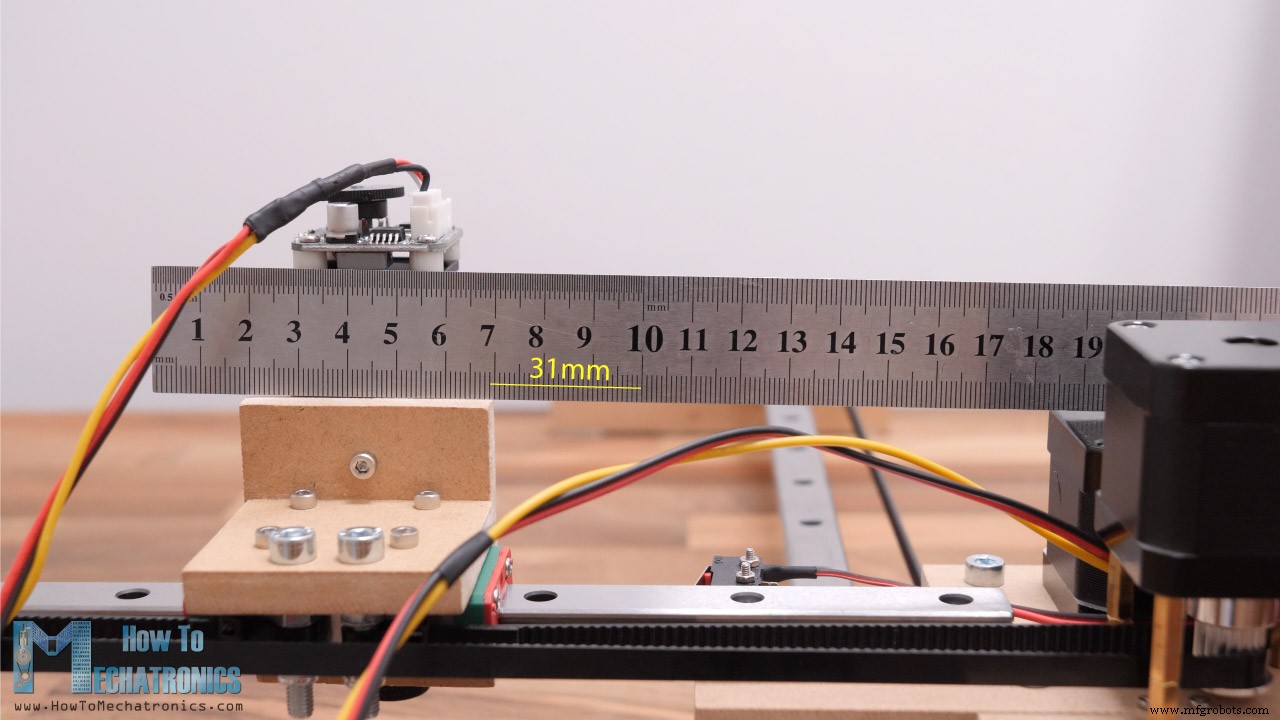
다음은 기계에 대한 이러한 값을 계산하는 방법입니다. 여기서 기본값은 일반적으로 250단계/mm입니다. 이제 JOG 명령을 사용하여 기계를 이동할 수 있습니다(예:20mm). 그러면 기계가 실제로 얼마나 움직일지 확인해야 합니다.
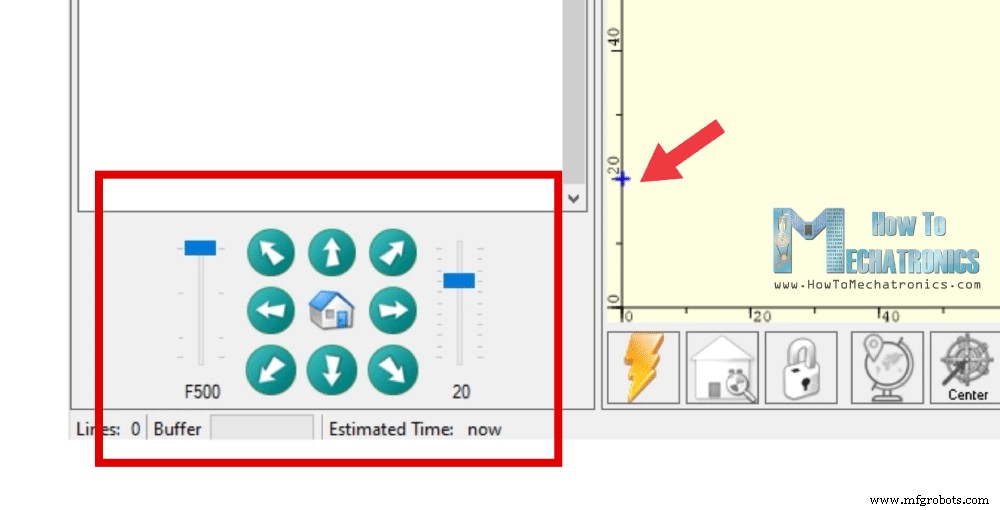
제 경우에는 Y축으로 20mm 조그를 했을 때 실제 움직임은 31mm였습니다.
따라서 20/31 =0.645이고 이 값에 250을 곱하면 161.29가 됩니다. 그래서 그것이 우리 기계의 steps/mm 값으로 설정해야 하는 값입니다.
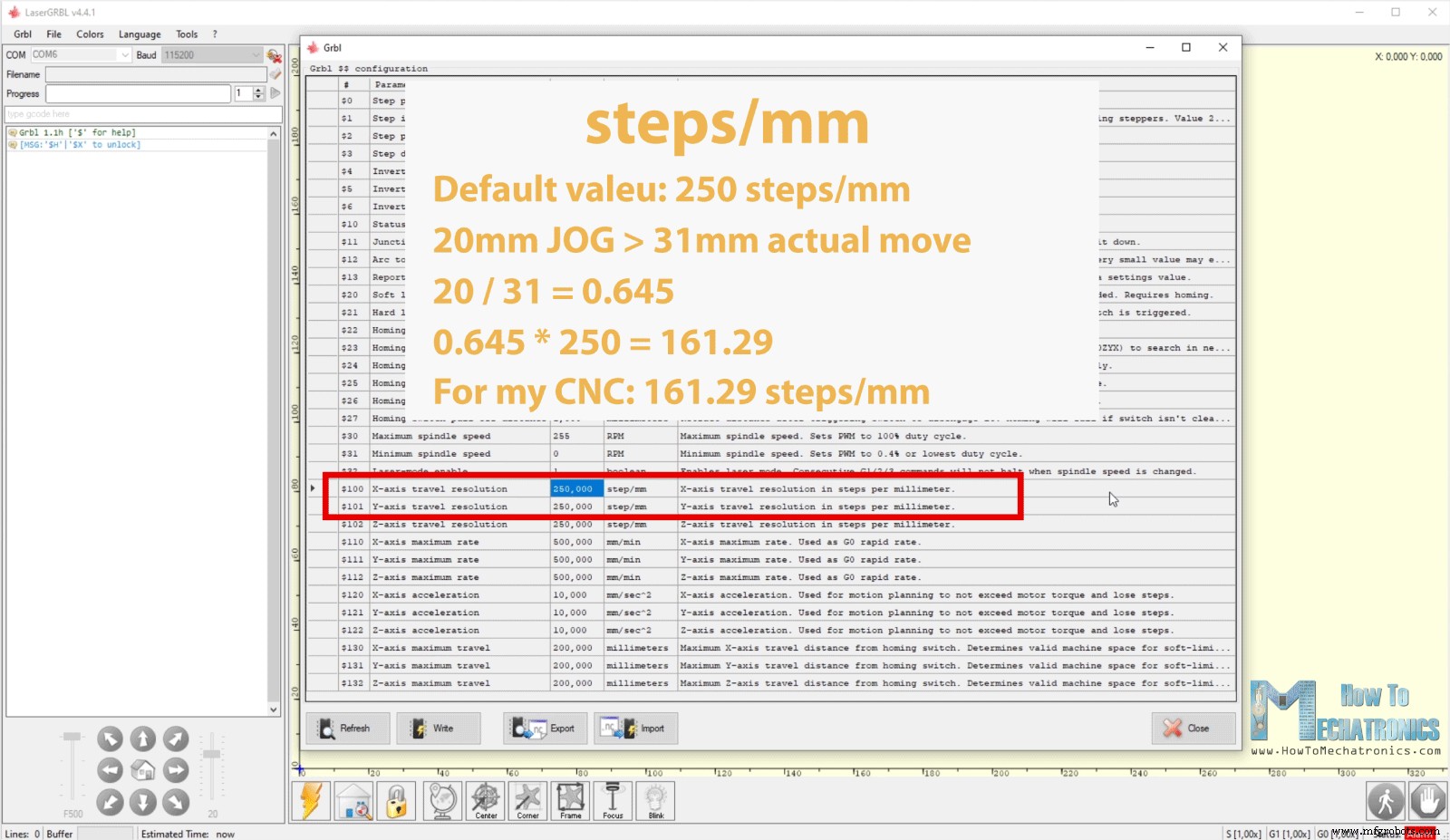
업데이트된 값으로 지금 기계를 이동하려고 하면 기계가 정확한 거리를 이동해야 합니다. 결과가 마음에 들지 않으면 사각형을 그리고 측정하여 이 값을 미세 조정할 수 있습니다. 결국 160steps/mm 값을 사용했습니다.
그럼에도 불구하고 조정해야 할 다른 중요한 매개변수도 있습니다. 예를 들어 실제 리미트 스위치인 하드 리미트, 작업 영역을 정의하는 소프트 리미트, 기계에서 리미트 스위치가 있는 위치를 정의하는 원점 복귀 방향 등을 설정해야 합니다.
내 매개변수 세트를 다운로드하여 펌웨어로 가져올 수 있습니다.
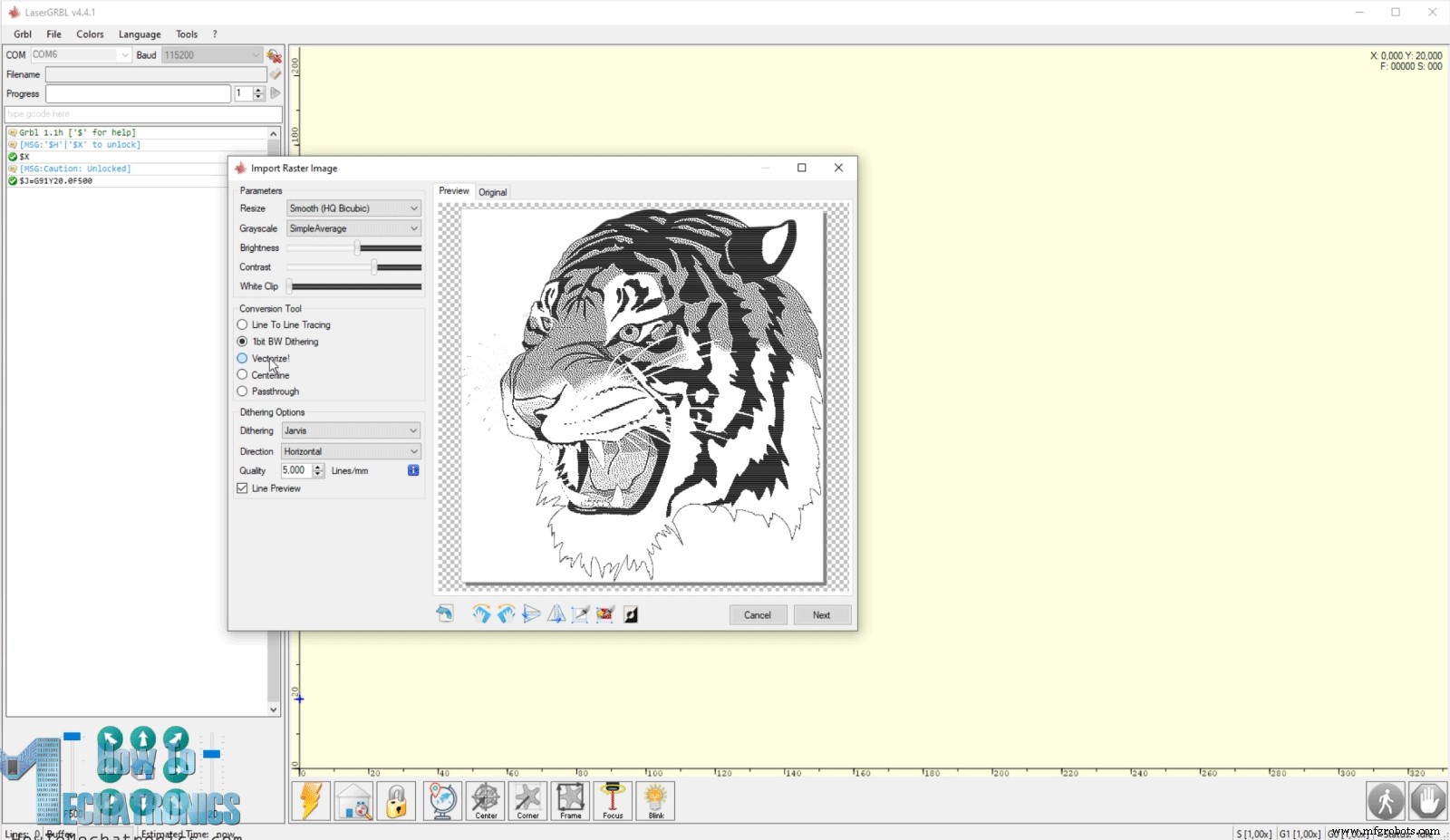
이 소프트웨어의 또 다른 장점은 G 코드 생성기가 내장되어 있다는 것입니다. 즉, 사진, 클립 아트, 연필 그림 등을 소프트웨어에 직접 로드할 수 있으며 필요에 따라 조각용 G 코드를 생성할 수 있습니다. 래스터링 이미지 도구는 Line to Line 추적, 벡터화, 1비트 BW 디더링 등 선택할 수 있는 다양한 옵션이 있어 매우 다재다능합니다.
물론 원하는 경우 G 코드 생성을 위한 Inkscape 및 플러그인 Inkscape-Lasertools와 같은 다른 소프트웨어로 G 코드를 생성하고 여기에 로드할 수도 있습니다. SCARA Robot 레이저 조각기의 경우 이전 비디오에서 G 코드를 생성하기 위해 이 방법을 사용하는 방법을 이미 설명했으므로 자세한 내용은 해당 비디오를 확인할 수 있습니다.
이제 LaserGRBL을 사용하여 사진에서 레이저 조각을 위한 G 코드를 생성하는 방법을 보여 드리겠습니다. 여기에 강아지 사진이 있습니다. 이 사진은 소프트웨어로 엽니다.
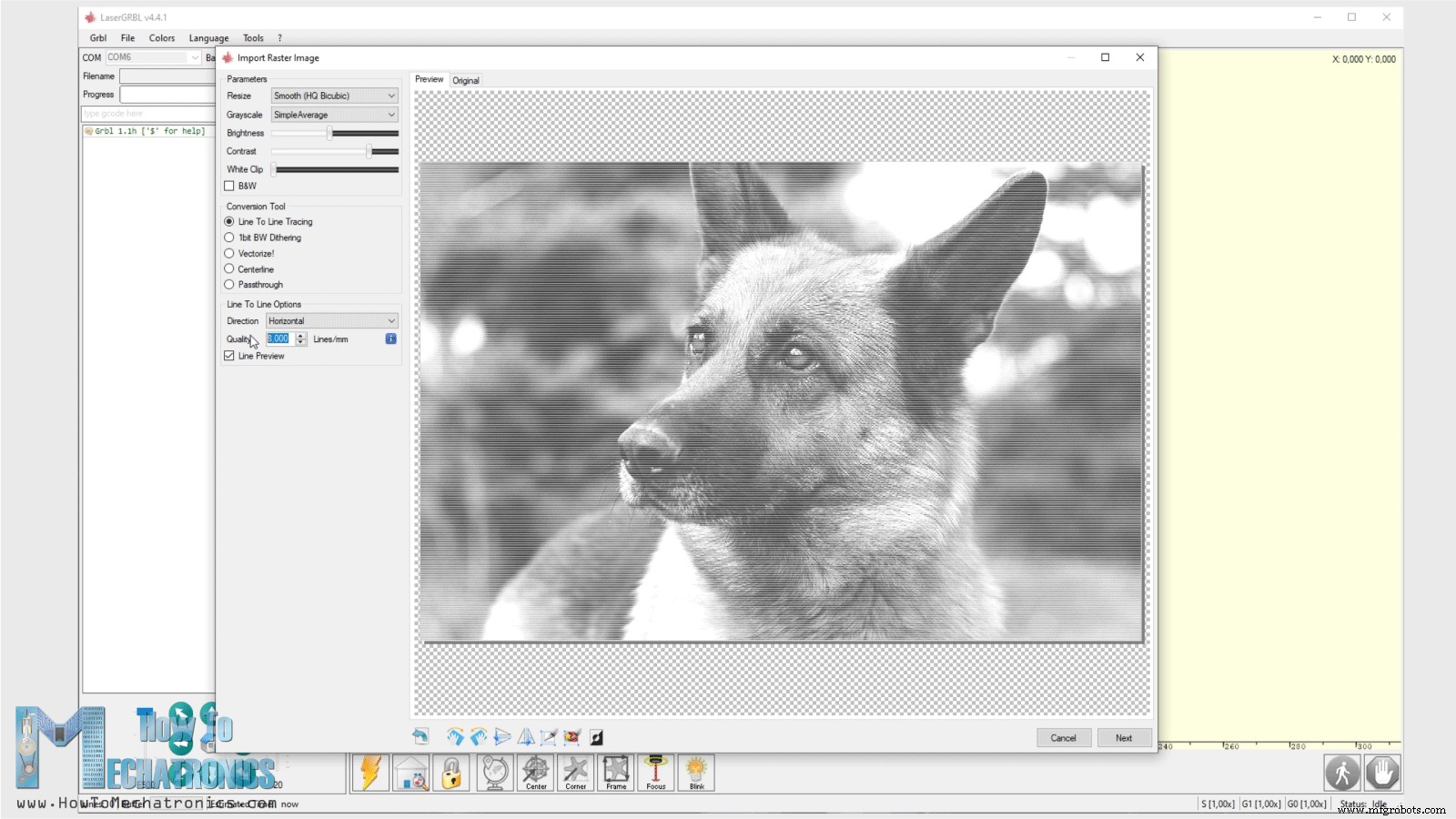
밝기 및 대비 옵션을 사용하여 이미지를 원하는 대로 조정할 수 있습니다. 우리는 사진의 변환 유형을 선택할 수 있습니다(예:라인에서 라인 추적, 1비트 BW 디더링 또는 벡터 형식). 이 사진에 Line to Line 추적을 사용하고 여기서 mm당 라인 수로 정의되는 조각 품질과 라인 방향도 선택할 수 있습니다.
다음으로 조각 속도를 선택하고 레이저 출력의 최소 및 최대 PWM 값을 설정하고 조각 크기를 설정할 수 있습니다.
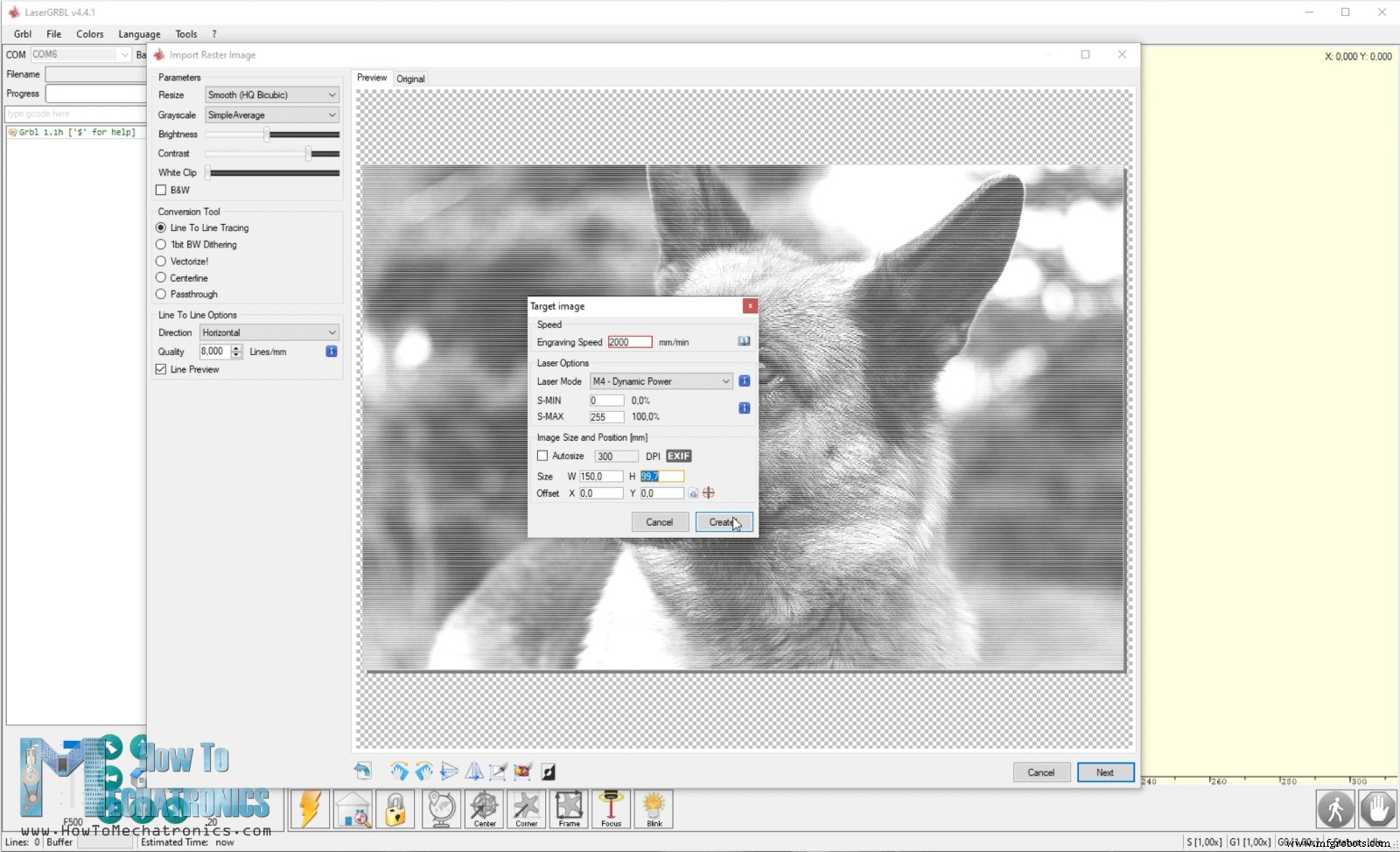
그게 다야 소프트웨어가 이 조각을 위한 G 코드를 생성합니다. 시작하기 전에 프레임 버튼을 사용하여 조각이 수행될 위치를 설명하거나 표시하여 필요에 따라 작업 조각을 조정할 수 있습니다.
매우 위험하기 때문에 레이저의 자외선으로부터 눈을 보호하는 레이저 보안경을 사용해야 합니다.
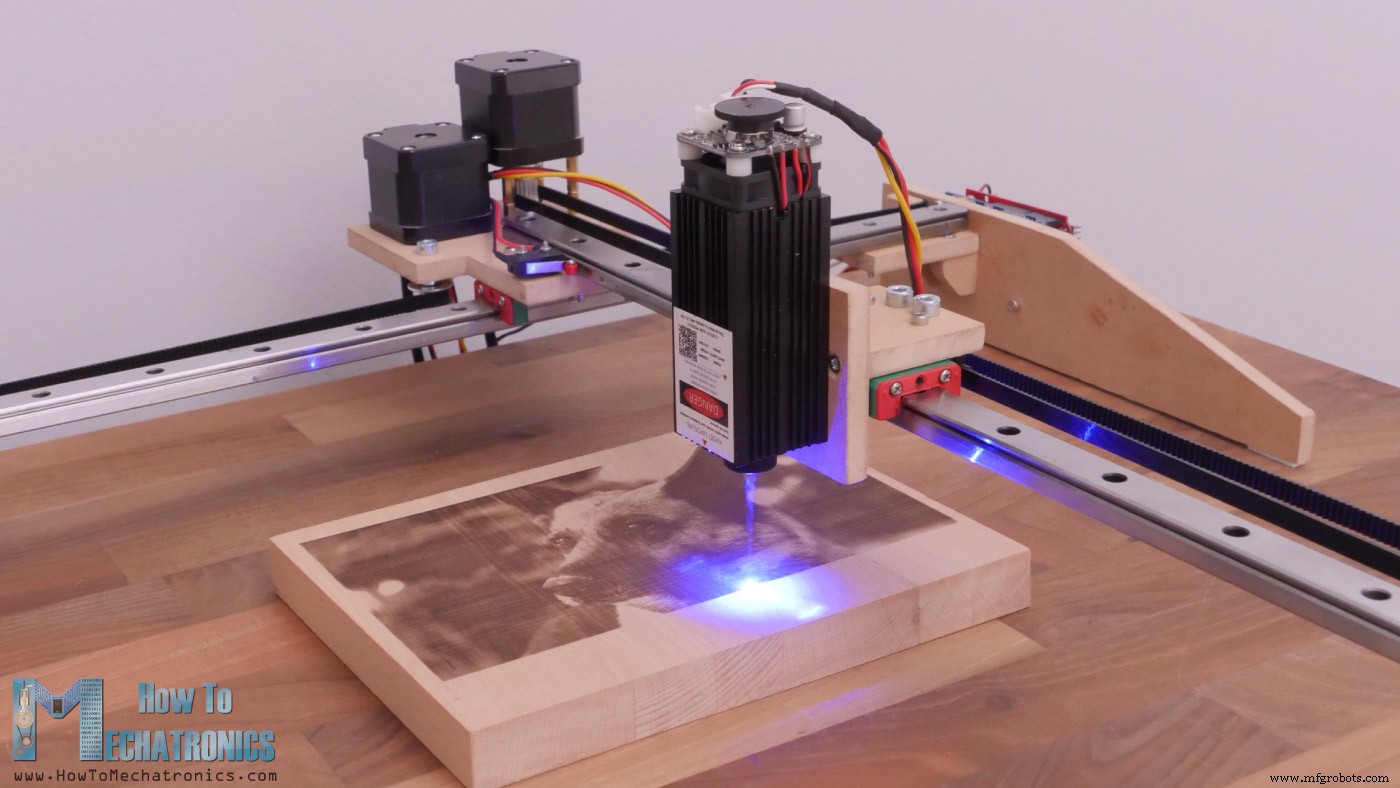
기계를 올바르게 보정했다면 꽤 좋은 조각을 얻을 수 있습니다. 보정을 위해 투명도가 100%에서 10% 사이인 정사각형을 가진 제가 만든 이 이미지를 사용할 수 있습니다.

결과에 따라 레이저 출력에 대한 조각 속도와 PWM 값을 조정합니다.
여기에서 보정 이미지를 다운로드할 수 있습니다.
자, 여기까지가 이 튜토리얼입니다. 나는 당신이 그것을 즐기고 새로운 것을 배웠기를 바랍니다. 질문이 있는 경우 아래 의견 섹션에 자유롭게 질문하고 다른 Arduino 프로젝트를 확인하는 것을 잊지 마십시오.
제조공정
부품을 가공할 때 일부 설계는 다른 설계보다 생산하기 쉽기 때문에 다양한 형상의 가공성은 염두에 두어야 할 중요한 고려 사항입니다. 언더컷은 표준 엔드밀이 달성할 수 없는 기능입니다. 이러한 이유로 언더컷이 있는 부품은 설계가 어려운 경우가 많으며 이러한 특성이 어려운 부품을 처리할 때 최상의 결과를 얻으려면 몇 가지 주요 고려 사항과 전문 지식이 필요합니다. 언더컷 가공이란 무엇입니까? 언더컷 가공은 가공된 부품에 함몰 또는 함몰 형상을 생성하는 것과 관련된 가공 기술입니다. 대부분의 가공 서비스에 사용되는 표준 절삭 공구(예
CNC 선반 기계 부품은 이전에 CNC 선반 소개, 주요 부품 및 기능에 설명된 사진과 함께 매우 간략하게 설명되어 있습니다. 이제 CNC 선반 기계 부품에 대해 배운 내용을 테스트할 시간이므로 시작하겠습니다. CNC 선반 기계 부품 식별 – 1 아래 그림에 표시된 CNC 선반 기계 부품을 확인할 수 있습니까? 답변: 이것은 CNC 선반 기계 공구 터렛입니다. CNC 공구는 기계가공 작업을 위해 CNC 선반 터렛에 장착되며 공구는 먼저 부품 프로그램 명령으로 인덱싱(절단 위치에서)한 다음 해당 공구로 절단이 시작됩니다.