

산업용 로봇

산업 제조
모든 것을 할 수 있는 단 하나의 제조 셀만 필요했다고 상상해 보십시오. 이것이 바로 연구원 팀이 RoboDK로 하는 일입니다.
지금 부품을 제조하는 방법에 대해 생각해 보세요.
단계가 많죠? 하나의 셀은 원료를 사용 가능한 공작물로 바꿉니다. 다른 셀은 부품의 거친 모양을 잘라낸 다음 미세 가공을 완료합니다. 또 다른 셀이 표면 마무리 작업을 수행합니다. 결국, 작업장은 기계로 가득 차서 작업자는 따라잡기 위해 여기저기서 뛰어다니게 됩니다.
이 모든 단계를 완료하는 데 하나의 셀만 있으면 유용하지 않을까요?
이것은 EU의 Horizon 2020 자금 지원 프로그램에 대한 최근 프로젝트 제안에서 연구원 그룹이 다루기로 결정한 질문입니다.
HYROMAN은 2017년에 제출된 EU 프로젝트 제안서의 이름입니다.
EU(유럽 연합)는 연구 프로젝트 자금을 라운드로 구성합니다. 현재 라운드는 Horizon 2020이며, 지난 5년 동안 600,000건 이상의 신청서가 제출되었습니다(그 중 3%만 자금 지원).
HYROMAN은 하이브리드 로봇 제조를 의미합니다. 프로젝트의 아이디어는 하나의 로봇 셀 내에서 모든 제조 단계를 달성할 수 있는 플랫폼을 개발하는 것입니다.
프로젝트 제안서는 HYROMAN이 "민첩하고 비용 효율적인 생산을 가능하게 하는 파괴적이고 혁신적인 제조 시스템을 구축할 계획"이라고 설명했습니다.
제안된 프로젝트의 핵심은 "생산 시간, 작업 현장 공간 및 필요한 자본 지출을 최소화하기 위한 ... 고급 로봇 시스템"인 "HYROMAN 플랫폼"입니다.
세 가지 핵심 제조 단계를 단일 셀로 결합합니다.
하나의 로봇으로 이 세 단계를 모두 완료하는 것이 실제로 가능합니다. 그러나 적층 제조는 다른 두 단계보다 훨씬 오래 걸리므로 두 대의 로봇을 사용하는 것이 좋습니다. 셀의 전체 처리량을 늘리기 위해 3D 프린팅 단계에 여러 로봇을 사용하는 것이 합리적일 수도 있습니다.
HYROMAN을 좋은 아이디어로 만드는 한 가지 이유는 RoboDK를 프로그래밍 플랫폼으로 사용하기 때문입니다. RoboDK를 사용하면 동일한 환경 내에서 세 가지 프로그래밍 단계를 모두 쉽게 달성할 수 있습니다.
팀은 제안을 위해 소프트웨어를 사용하여 세포의 첫 번째 단계(3D 인쇄)의 시뮬레이션을 구축했습니다. 이를 위해 3D 프린팅 마법사를 사용했습니다. 그러나 이것은 시작일 뿐입니다. RoboDK의 통합 프로그래밍 마법사를 사용하면 세 단계를 모두 쉽게 달성할 수 있습니다.
HYROMAN 팀이 적층, 절삭 및 변형 제조에 동일한 소프트웨어를 사용하는 방법은 다음과 같습니다.
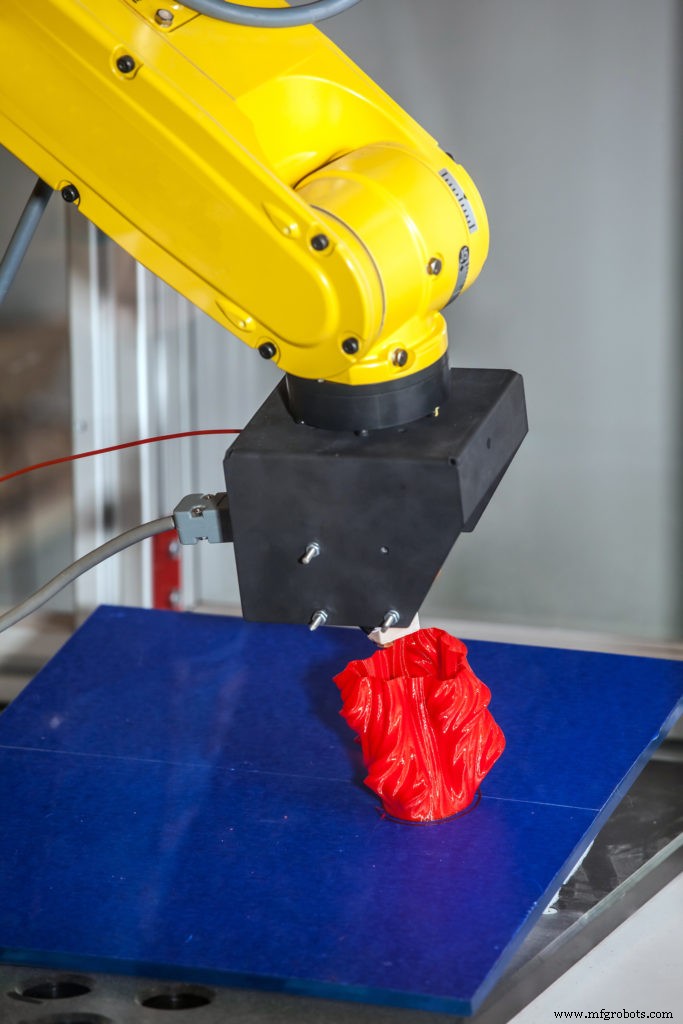
첫 번째 단계는 적층 제조를 사용하여 부품의 대략적인 모양을 3D로 인쇄하는 것입니다.
RoboDK의 3D 프린팅 마법사를 사용하면 CAD 모델을 일련의 로봇 지침으로 쉽게 변환할 수 있습니다. 무료 소프트웨어 Slic3r에서 생성할 수 있는 입력으로 GCODE 파일이 필요합니다.
3D 프린팅에는 많은 가능성이 있습니다. 최근에 RoboDK를 사용하여 음식을 3D 인쇄하는 팀에 대해 보고했습니다. 건축용 콘크리트 3D 프린팅도 보았습니다.
RoboDK의 다음 3D 인쇄 예를 참조하고 설명서 페이지에서 실제 지침을 확인하세요.
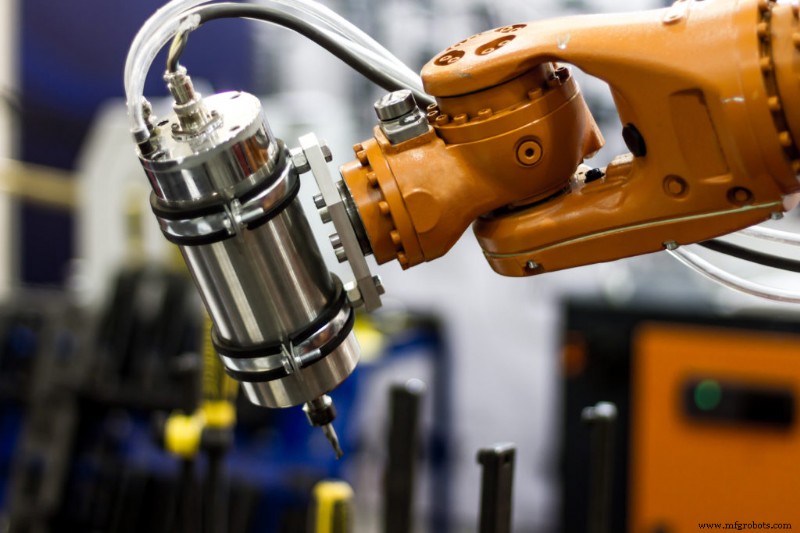
두 번째 단계는 로봇 호환 공작 기계를 사용하여 부품의 세부적인 부분을 가공하는 것입니다.
RoboDK의 가공 마법사는 3D 프린팅과 매우 유사한 프로세스를 따릅니다. GCODE를 입력으로 사용하거나 다른 유형의 NC 파일을 사용합니다. 그러나 재료를 추가하는 대신 도구를 사용하여 재료를 제거합니다.
로봇 가공이 비즈니스에 어떻게 도움이 되는지 자세히 알아보려면 로봇 가공으로 삶을 단순화하는 방법 기사를 읽어보세요.
RoboDK에서 로봇 가공의 다음 예를 참조하고 실제 지침은 설명서 페이지를 확인하세요.

마지막 단계는 표면 처리를 수행하여 최종 제품의 재료 특성을 개선하는 것입니다(예:내마모성, 납땜성, 내식성 등을 개선하기 위해).
로봇의 정확한 움직임은 특정 표면 처리 방법에 따라 달라집니다. 그러나 많은 방법에서는 로봇이 곡선 경로로 이동하거나 개별 지점으로 이동해야 합니다. 이를 위해 RoboDK의 Curve Follow 및 Point Follow Wizards가 가장 유용할 것입니다.
이러한 동작은 표면 마무리 작업을 검사 또는 페인팅 작업과 매우 유사하게 만듭니다. 이는 로봇 검사에 대한 제조업체 가이드 문서에서 찾을 수 있습니다.
RoboDK에서 곡선 따르기 작업(그림)의 다음 예를 참조하고 설명서 페이지에서 실제 지침을 확인하세요.
HYROMAN은 좋은 아이디어입니다. 그러나 이점을 보기 위해 동일한 로봇 셀 내에서 세 가지 제조 작업을 모두 수행할 필요는 없습니다. 작업 중 하나만 구현하여 프로세스를 개선할 수 있습니다.
세 가지 작업 중 귀하의 비즈니스에 가장 유용한 작업은 무엇입니까? (예:로봇 3D 프린팅, 로봇 기계 가공 또는 로봇 표면 마무리).
자신에게 맞는 것을 선택하고 위의 링크를 사용하여 자세히 알아보세요.
올인원 제조 셀로 무엇을 달성할 수 있습니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
센서 가속도계는 장치의 충격과 진동을 감지하고 적절한 가속도의 크기와 방향을 측정합니다. 따라서 수많은 전자 장치, 항공기 및 기타 산업에서 찾을 수 있습니다. 이 기사에서는 센서 가속도계의 복잡한 세부 사항과 일상 생활에서의 적용을 강조합니다. 가속도계에 대해 자세히 알아보려는 전자 애호가라면 올바른 페이지에 오셨습니다. WELLPCB는 전자 부품과 관련된 동적 콘텐츠를 제공하기 위해 최선을 다하고 있습니다. 센서 가속도계란 무엇입니까? 센서 가속도계는 단순히 신체의 즉각적인 휴식 프레임에서 가속도를 식별하고 정량화하는 장치
Motoman ArcWorld 용접 셀에 투자해야 하는 많은 이유가 있습니다. 빠르고 효율적이며 고품질 용접을 생성합니다. 그러나 ArcWorld V-6000 셀과 같은 ArcWorld 셀에 투자할 때 시설의 생산성을 향상시키면서 제조 프로세스를 간소화할 수 있는 용접 셀에도 투자한다는 사실을 알고 계셨습니까? 린 제조는 생산 라인에서 낭비되는 시간을 줄이는 프로세스입니다. 사람들이 자신의 시설에 린 제조 방식을 도입하면 작업자는 이전에 포함되었던 불필요한 단계를 제거하여 작업을 더 빨리 완료할 수 있습니다. Motoman의