

임베디드

산업 제조
차세대 네트워크 임베디드 시스템은 신뢰성 및 안전과 같은 핵심 품질을 유지하면서 신속한 프로토타이핑과 고성능을 필요로 합니다. 그러나 안전이 중요한 임베디드 시스템의 배포는 복잡한 소프트웨어 도구 체인 및 엔지니어링 프로세스로 인해 어려움을 겪습니다. 또한 머신 러닝(ML) 및 인공 지능(AI) 응용 프로그램에 의존하는 자율 시스템의 현재 추세와 함께 실패 작동 요구 사항으로 인해 이러한 새로운 시스템의 검증 및 검증이 어려운 작업이 되고 있습니다.
이 문제를 해결하기 위해 XANDAR라는 3년 간의 유럽 연합 자금 지원 프로젝트는 상호 운용 가능하고 자율적인 임베디드 시스템의 신속한 프로토타이핑에 대한 요구를 충족하는 성숙한 소프트웨어 도구 체인(요구 사항 캡처에서 검증 및 검증을 포함한 대상에 대한 실제 코드 통합까지)을 제공하는 것을 목표로 합니다. .
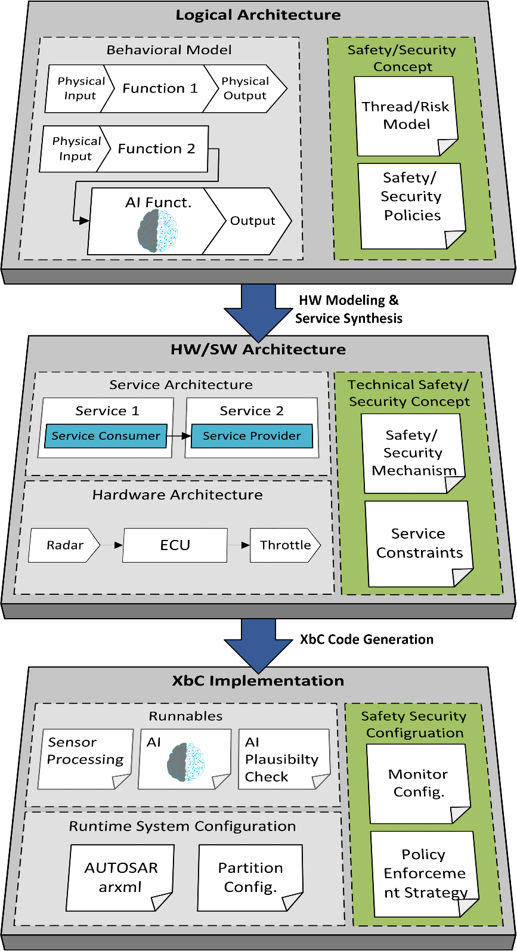
모델 기반 시스템 아키텍처에서 시작하여 XANDAR는 새로운 자동 모델 합성 및 소프트웨어 병렬화 기술을 활용하여 특정 비기능 요구 사항을 달성하여 새로운 실시간, 안전 및 보안 기반 구축(X-by -건설 또는 XbC) 패러다임.
안전이 중요한 환경의 다중 코어 과제
병렬 처리의 시대는 멀티 코어 아키텍처를 주류로 밀어 넣었고 거의 모든 응용 프로그램 영역에서 사용되는 상황이 되었습니다. 주로 병렬 작동 실행 스레드 간의 동기화 및 경쟁 조건과 관련된 멀티 코어 아키텍처 프로그래밍의 초기 과제는 아직 완전히 해결되지 않았습니다.
컴파일러, 병렬 언어, 특수 언어 구성 및 프로그래밍의 새로운 패러다임에 익숙해지는 소프트웨어 개발자의 전반적인 경험 증가로 상황이 완화되지만 안전이 중요한 영역에서 멀티 코어는 아직 성공하지 못했습니다. 자동차 또는 항공우주와 같은 환경에서는 멀티 코어 프로그래밍에서 추가된 복잡성 및 새로운 오류 소스와 상충되는 오류 없는 작동의 검증 및 증명이 필수적입니다.

이러한 맥락에서 모델 기반 설계는 현재의 다중 코어 아키텍처 프로그래밍과 안전이 중요한 영역의 요구 사항 사이에 걸쳐 있는 격차를 줄이고 해답을 제공할 수 있습니다.
제어 기능의 모델 기반 설계는 특히 임베디드 전자 및 소프트웨어를 점점 더 많이 활용하는 항공우주, 자동차 및 공정 산업에서 지난 수십 년 동안 점점 더 많은 관심을 받아왔습니다. 이러한 경향의 주된 이유는 상위 수준의 관점에서 개발 프로세스를 관리함으로써 시스템의 하위 수준 설계에서 추상화하는 동시에 시스템 동작의 시뮬레이션 및 모델링된 기능의 코드 생성을 가능하게 하는 가능성입니다. 그 결과 개발 시간과 비용이 절감됩니다.
모델 기반 설계가 초기 시스템 사양, 구조 모델링 및 설계 공간 탐색에 점점 더 많이 채택되고 있지만 중요한 임베디드 시스템에 대한 최종 소프트웨어 구현은 여전히 수동으로 개발되는 경우가 많습니다.
격리된 임베디드 시스템의 단일 안전 측면을 인식하는 종단 간 솔루션은 WCET(최악 실행 시간) 인식 코드 생성에 중점을 둔 ARGO와 같은 최근 연구 프로젝트에서 개발되었습니다. 전기/전자 아키텍처에 대한 모델 기반 시스템 엔지니어링 접근 방식도 최근 몇 년 동안 확립되었습니다. 그들은 아키텍처를 여러 추상화 계층과 관점으로 나누어 분석 및 설계에서 시리즈 생산에 이르는 개발 프로세스 전반에 걸쳐 복잡성을 관리합니다. 그 주된 이유는 모델 기반 기능 설계와 유사하지만 아키텍처 및 시스템 관점에서 볼 수 있습니다.
각 도메인의 모델 기반 개발은 일반적으로 별도의 실행 프로세스이며, 여기서 아키텍처 결정과 정보는 모델 기반 기능 설계 도구에서 수동으로 모델링해야 하거나 그 반대의 경우도 마찬가지입니다. 통신 매트릭스와 같은 시스템의 개별 측면에 대한 교환 형식이 존재하지만 가져오기/내보내기 프로세스는 특히 모델에 대한 분산 및 동시 협업을 고려할 때 아키텍처와 상호 보완적 행동 모델 간에 불일치를 유발하는 오류가 발생하기 쉬운 경향이 있습니다.
기존 접근 방식과 연구는 간단한 유한 상태 기계 동작 설명으로 아키텍처 모델을 수정하고 시뮬레이션 기반 검증을 위한 실행 가능한 아키텍처 사양 생성을 처리합니다. 그러나 이는 단일 소스 메타 모델을 사용하여 통합 개발 환경 내에서 모든 설계 및 검증 단계를 캡처하는 전체적인 접근 방식으로 더욱 발전해야 합니다.
여기에는 특히 분산 네트워크 임베디드 시스템의 아키텍처 모델링, 상세한 통합 행동 모델링, 교차 레이어 시뮬레이션 모델로의 합성, 필요한 검증 단계 및 후속 코드 생성이 포함됩니다.
XANDAR는 코드 생성기가 필요한 XbC(X-by-construction) 보장을 제공하고 입력 모델의 관련 비기능 속성을 보존하는 전체론적 접근 방식을 실현하기 시작했습니다. XANDAR는 AI 및 ML 애플리케이션을 위한 비결정적 가속기 뿐만 아니라 중요한 서비스에 대한 모니터링 실행 파일 생성을 포함하여 플랫폼에 구애받지 않는 코드 생성 지원을 제공함으로써 이 분야에서 새로운 혁신을 도입할 것입니다.
이러한 문제를 해결하려면 성능 및 에너지 효율성뿐 아니라 비기능적 보장을 위한 새로운 개념, 자동화된 의사 결정 알고리즘, 형식 검사 및 프로그램 최적화가 필요합니다. 전체 프로세스는 실시간 성능, 에너지 효율성, 비기능적 보증 및 런타임 유연성 사이의 균형을 유지해야 합니다. 이러한 모든 측면을 공동 최적화하는 고품질 코드 생성기 및 변환에는 새롭고 전문화된 솔루션이 필요합니다.
XANDAR 컨소시엄 파트너
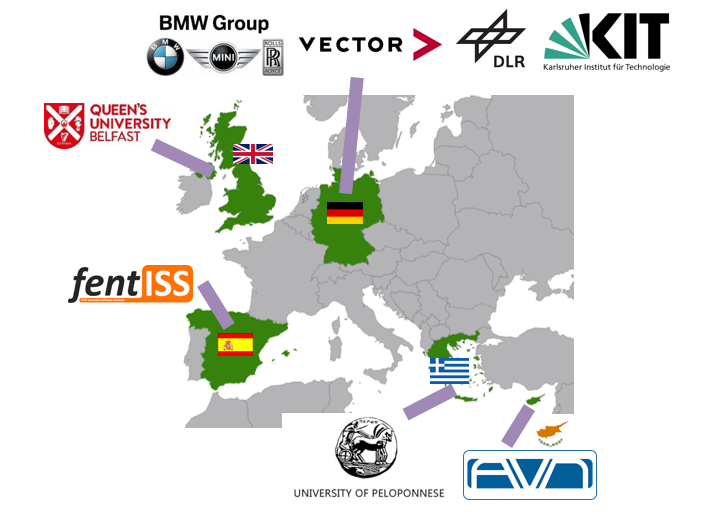
XANDAR 프로젝트는 2023년 12월에 종료되는 3년 프로그램으로, Horizon 2020 프레임워크에 따라 EU에서 500만 유로의 자금을 지원합니다. Karlsruhe Institute of Technology의 Jürgen Becker 교수가 이끄는 산업 및 학계 컨소시엄의 파트너는 다음과 같습니다.
<울>8개의 XANDAR 컨소시엄 파트너 중 하나는 Vector입니다. 회사는 임베디드 소프트웨어 전문가로서의 전문성과 고성능 개발 환경인 PREEvision 및 TA Tool Suite를 기반으로 프로젝트의 야심찬 목표를 달성하는 데 기여하고 있습니다.
여기에서 PREEvision을 사용하면 모든 시스템 수준을 통합하는 잘 정의된 의미 체계로 모델 기반으로 연결된 임베디드 시스템을 협력적으로 지정할 수 있습니다. TA Tool Suite는 복잡한 실시간 시스템의 시간 동작을 지정, 시뮬레이션 및 검증하는 데 사용할 수 있습니다. 두 환경은 X-by-Construction 설계 프레임워크를 설정하기 위한 기반을 제공합니다.
임베디드
모터와 액츄에이터, 산업용 장비, 이런! 산업용 장비가 제대로 작동하도록 하는 데 도움이 되는 다양한 구성 요소가 있습니다. 모터와 액추에이터는 특히 자재 취급 장비와 관련하여 이러한 작업에서 중요한 역할을 하는 것들 중 일부입니다. 모터와 액추에이터는 서로 독립적으로 또는 함께 작동할 수 있습니다. 이 게시물에서는 각 구성 요소의 다양한 유형과 산업 장비 작동에서 이들이 수행할 수 있는 역할을 포함하여 모터와 액추에이터에 대해 자세히 살펴보겠습니다. 액추에이터 및 모터에 대해 알아야 할 사항은 다음과 같습니다. 액추에이터
증기 열교환기 및 추적 시스템:설계 엔지니어를 위한 모범 사례 Alex Chu, 산업용 증기 시스템 SME, Swagelok Field Engineering 적절한 스팀 열교환기 또는 스팀 히트 트레이싱 시스템을 설계하려면 먼저 시스템이 작동할 작동 특성을 완전히 이해해야 합니다. 부적절한 성능은 가장 일반적으로 설계 엔지니어가 모든 증기 시스템 특성을 고려하지 못한 데 기인합니다. 증기 시스템의 작동 매개변수와 문서를 철저히 검토해야 합니다. 응용 프로그램의 컨텍스트를 이해하지 못하면 일반적으로 시스템 구성 요소를 부적절하게