

사물 인터넷 기술

산업 제조

이 모든 것은 몇 년 전 FACE™(Future Airborne Capability Environment) 통합 워크샵 상임 위원회에서 FACE 참조 구현 아키텍처의 BALSA(Basic Avionics Lightweight Source Archetype) 예제를 발표했을 때 시작되었습니다. BALSA는 FACE 기술 표준에 부합하는 UoC(Units of Conformance)를 포함하는 소프트웨어 응용 프로그램입니다. 그 목적은 잠재적인 FACE 소프트웨어 공급업체 및 FACE 소프트웨어 통합업체에게 실제 사례를 제공하는 것입니다. 또한 이식성 단위(UoP), UoC 및 FACE 응용 프로그래밍 인터페이스(API)가 잠재적인 시스템에서 실현될 수 있는 방법에 대한 교육 메커니즘으로 사용됩니다.
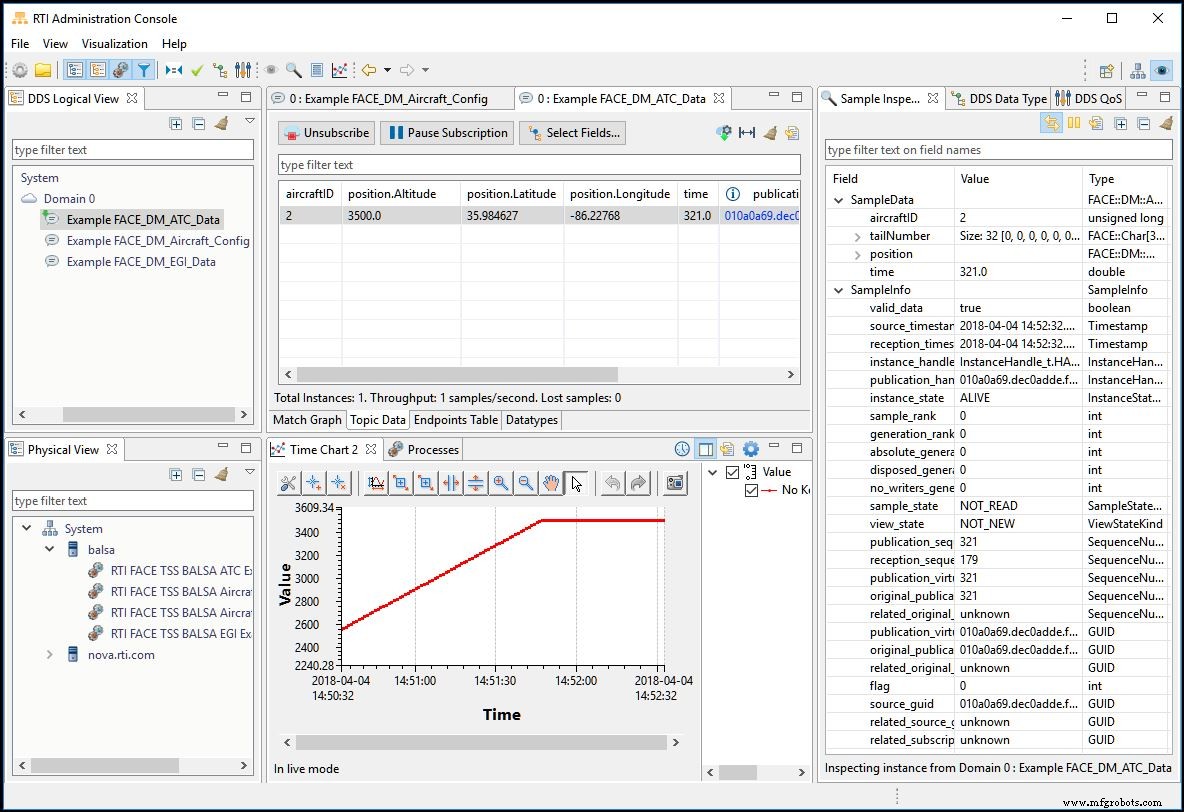
BALSA는 자체적인 단순한 TSS(Transport Services Interface) 구현을 제공했습니다. TSS 구현은 잘 작동합니다. 그러나 단점 중 하나는 현재 진행 중인 상황에 대한 통찰력을 제공하는 도구가 없다는 것입니다. 이는 일이 계획대로 진행되지 않을 때 매우 중요합니다. BALSA TSS를 DDS(Data Distribution Service) 기반 TSS, 특히 RTI Connext DDS(https://www.rti.com/industries/face)로 교체하는 것이 얼마나 쉬운지 알아보기로 했습니다.
우리는 TSS 레이어를 교체하는 것이 얼마나 쉬운지 놀랐습니다. BALSA TSS를 RTI TSS로 교체하는 데 몇 시간 밖에 걸리지 않았습니다. 이는 FACE 표준 목표 중 하나인 휴대성이 잘 작동한다는 증거이기도 했다. 업데이트된 TSS 레이어를 통해 DDS 도구를 사용할 수 있었습니다. 또한 다른 DDS 응용 프로그램에 연결할 수 있는 액세스 권한도 부여되어 다른 구성 요소와 쉽게 통합할 수 있습니다.
2017년 6월 FACE 회원 회의 BITS 이벤트에서 RTI, Honeywell, TES-SAVi, Wind River 및 Mercury Systems의 5개 회사는 개별 FACE 정렬 구성 요소를 교차 통합 및 결합하여 신속한 통합 이점의 타당성을 입증하기 위해 협력했습니다. FACE 기술기준 2.1. "FACE 교차 통합 성공 - Honeywell, RTI, TES-SAVi, Wind River 및 Mercury Systems"라는 제목의 FACE NAVAIR TIM 문서는 다음과 같은 결과를 공유합니다. (https://www.opengroup.us/face/documents.php?action =show&dcat=70&gdid=18823)
또 다른 프로젝트는 Harris FliteScene과 함께 RTI TSS를 사용하는 것이었습니다. Harris FliteScene 디지털 지도는 전투에서 입증된 고성능 디지털 이동 지도 소프트웨어 제품으로 민간인과 군용 승무원 모두가 직면한 가장 까다로운 조건에 대해 고급 상황 인식 기능을 제공합니다. FliteScene은 임무 중에 승무원을 안전하게 보호하기 위해 고급 지형 인식 및 장애물 회피 기능을 지원하고 FliteScene의 3D 합성 비전 모드는 최악의 조건을 탐색하는 데 도움이 됩니다. FliteScene은 Link 16 및 ANW2와 같은 최신 전술 네트워크와 통합되어 전체 실시간 공통 작전 그림을 제공합니다.
이것은 또한 RTI TSS를 사용하기 위해 FACE 호환 휴대용 구성 요소를 이식하는 것이 얼마나 쉬운지를 확인하는 좋은 테스트였습니다. Harris로부터 오브젝트 파일과 데이터 모델을 받았습니다. TSS와 통합하는 단계는 다음과 같습니다.
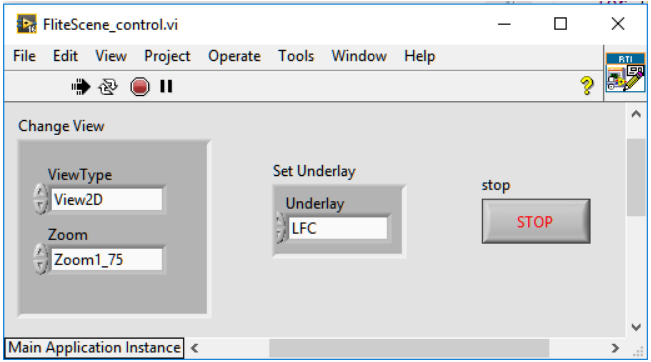
<울>통합하기가 놀라울 정도로 쉬웠고 단 며칠 만에 프로토타입을 실행할 수 있었습니다. FliteScene에는 여러 입력 메시지가 있으며 대부분은 레이아웃을 제어하기 위한 것입니다(예:확대/축소, 언더레이, 오버레이). 지도는 위치 업데이트 메시지를 통해 제공되는 현재 위치를 기준으로 중앙에 배치됩니다. 위치를 제공하는 데 사용할 수 있는 여러 소스가 있습니다. 지도 기능을 쉽게 제어하기 위해 RTI DDS LabView Toolkit(https://www.rti.com/products/dds/labview)을 사용하여 LabView에서 간단한 UI를 만들었습니다. 모두 공통 연결 프레임워크인 DDS를 기반으로 하기 때문에 퍼즐 조각처럼 잘 맞고 함께 작동합니다.
FliteScene을 사용하여 지도에 입력을 제공하는 데 사용할 수 있는 항목을 찾고 있었습니다. 아이디어 중 하나는 시뮬레이션 환경과 결합하는 것이었습니다. 모델링 및 시뮬레이션 분야의 세계적인 리더인 VT MAK는 프로토콜 변환 및 브리징이 가능한 제품(VR-Exchange)을 제공합니다. VR-Exchange는 분산 시뮬레이션을 위한 범용 번역기이며 개방형 아키텍처는 DDS와 같은 다른 데이터 표준을 위한 맞춤형 브로커를 개발할 수 있음을 의미합니다.
FACE 기술 표준에 명시된 Transport Services Interface는 DDS를 비롯한 다양한 산업 표준을 사용하여 데이터 전송을 지원합니다.
양측이 통신 프로토콜로 DDS를 지원하기 때문에 양측을 연결하는 것이 얼마나 쉬운지 알아보기로 했습니다. 계획은 F18 HLA Federate를 FACE 호환 휴대용 구성 요소인 FliteScene에 연결하는 것이었습니다. 이 작업을 수행하는 것은 매우 간단했습니다.
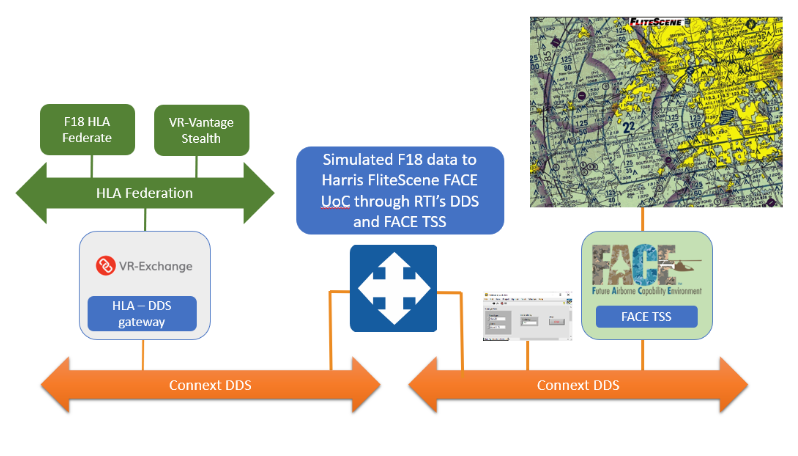
DDS를 TSS 전송으로 사용하면 FACE 준수 구성 요소 간의 이식성을 허용할 뿐만 아니라 DDS를 사용하는 다른 응용 프로그램에 연결할 수 있습니다. Flitescene의 경우 RTI Connext(https://www.rti.com/industries/face) 기반의 RTI TSS를 사용했습니다. HLA 측에서는 HLA 측의 데이터를 DDS 주제로 매핑하는 VR_Exchange DDS 브로커를 사용했습니다. FACE 구성 요소는 F18 Federate에서 사용되는 것과 다른 특정 데이터 모델을 사용합니다. 데이터는 두 데이터 모델 간에 매핑되어야 합니다. 다음을 포함한 두 가지 접근 방식이 가능합니다.
<울>개념 증명을 위해 후자의 접근 방식을 사용했습니다. FliteScene에서 사용하는 위치 주제에 simpleBaseEntity 주제를 연결하는 데 필요한 라우팅 서비스. 서로 다른 데이터 유형 외에도 양측은 서로 다른 형식을 사용했습니다. HLA에서 오는 데이터는 Geocentric 좌표에 있는 반면 FliteScene은 위도/경도에 있을 것으로 예상합니다. 좌표 간의 변환을 수행하는 사용자 지정 변환 라이브러리를 사용하여 좌표를 매핑하도록 라우팅 서비스를 구성했습니다. 우리는 다음과 같은 아키텍처를 완성했습니다:
 HLA와 DDS 연결에 대한 자세한 정보를 위해 RTI는 National 시뮬레이션 센터(NCS)는 4월 10일 "시뮬레이션을 위한 DDS:연결 프레임워크가 상호 운용성 문제를 해결하는 방법" 세미나를 개최합니다. 이 무료 이벤트 등록 방법을 비롯한 추가 정보는 https://www. Simulationinformation.com/news/ncs-real-time-innovations-event-industry-10-apr-2018
HLA와 DDS 연결에 대한 자세한 정보를 위해 RTI는 National 시뮬레이션 센터(NCS)는 4월 10일 "시뮬레이션을 위한 DDS:연결 프레임워크가 상호 운용성 문제를 해결하는 방법" 세미나를 개최합니다. 이 무료 이벤트 등록 방법을 비롯한 추가 정보는 https://www. Simulationinformation.com/news/ncs-real-time-innovations-event-industry-10-apr-2018
사물 인터넷 기술
로봇 시스템은 생산 및 인건비 감소에 따른 속도 증가를 포함하여 자체적으로 몇 가지 장점이 있지만 로봇 시스템의 장점을 향상시키는 다른 방법이 있습니다. 그 방법 중 하나는 비전을 시스템에 통합하는 것입니다. 비전 가이드 로봇 시스템에는 비전 구성 요소와 일반적으로 일종의 컨베이어인 핸들링 구성 요소와 함께 로봇 시스템 자체를 포함하여 세 가지 구성 요소가 있습니다. 비전 로봇 시스템은 주로 자재 취급 애플리케이션에 사용되지만 일부 용접 애플리케이션에도 사용할 수 있습니다. 부품이 컨베이어에 적재되면 로봇 시스템의 비전 기능이
로봇 시뮬레이션 및 오프라인 프로그래밍은 작업셀을 설계할 때 시간과 비용을 절약합니다. 통합자 또는 최종 사용자는 귀중한 시간과 비용을 장비에 투자하기 전에 작업 셀이 어떻게 작동할지 분석할 기회를 가져야 합니다. 시뮬레이션 및 오프라인 프로그래밍을 통해 통합자는 셀 설계에서 실수가 발생하기 전에 작업 셀의 여러 시나리오를 분석할 수 있습니다. 시뮬레이션을 사용하여 프로세스에 가장 적합한 로봇 모델을 파악하고, 로봇의 도달 범위와 액세스를 확인하고, 로봇 주변의 셀을 구성할 수 있습니다. 시뮬레이션은 실제로 프로세스를 능률화하고