




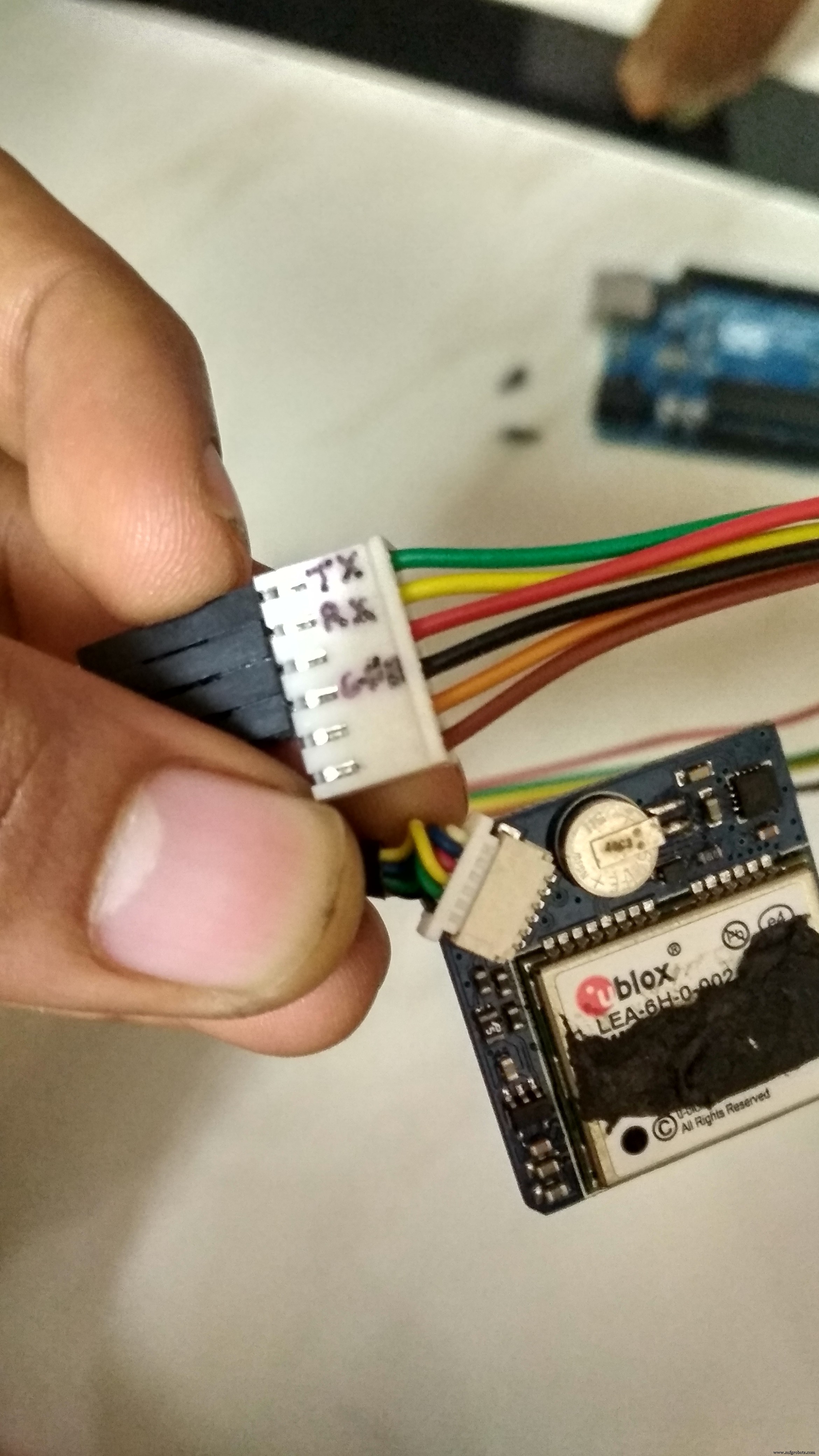
 GPS 및 Arduino 연결 Image2
GPS 및 Arduino 연결 Image2 
제조공정
- Raspberry Pi 및 Python으로 로봇 구축
- 예제를 사용하여 Python에서 모듈 가져오기
- Arduino로 물방울 캡처
- Python과 함께 Arduino 및 RFID를 사용한 출석 시스템
- DHT11 센서(LED 및 피에조 스피커 포함)
- Arduino Temp. 3.2 디스플레이가 있는 모니터 및 실시간 시계
- Arduino Mega를 NEO-6M GPS 모듈과 인터페이스하는 방법
- Arduino 및 MPU6050으로 서보 모터 제어
- Arduino를 사용한 음성 인식 및 합성
- GPS 및 TFT 디스플레이 실드가 있는 GPS 위치 표시