

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
 |
|
 |
|
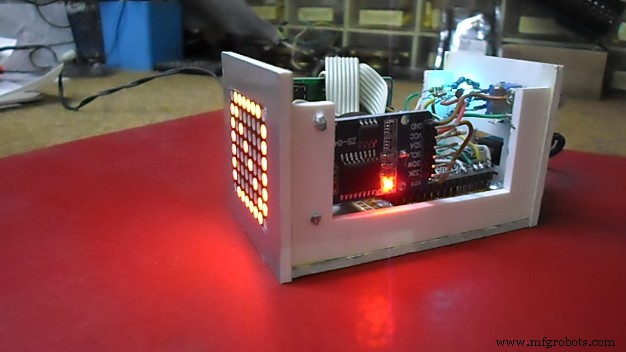
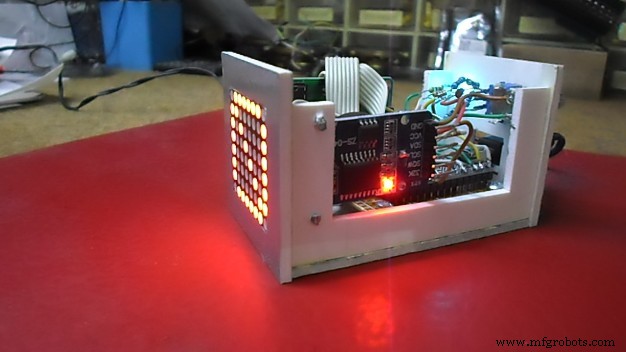
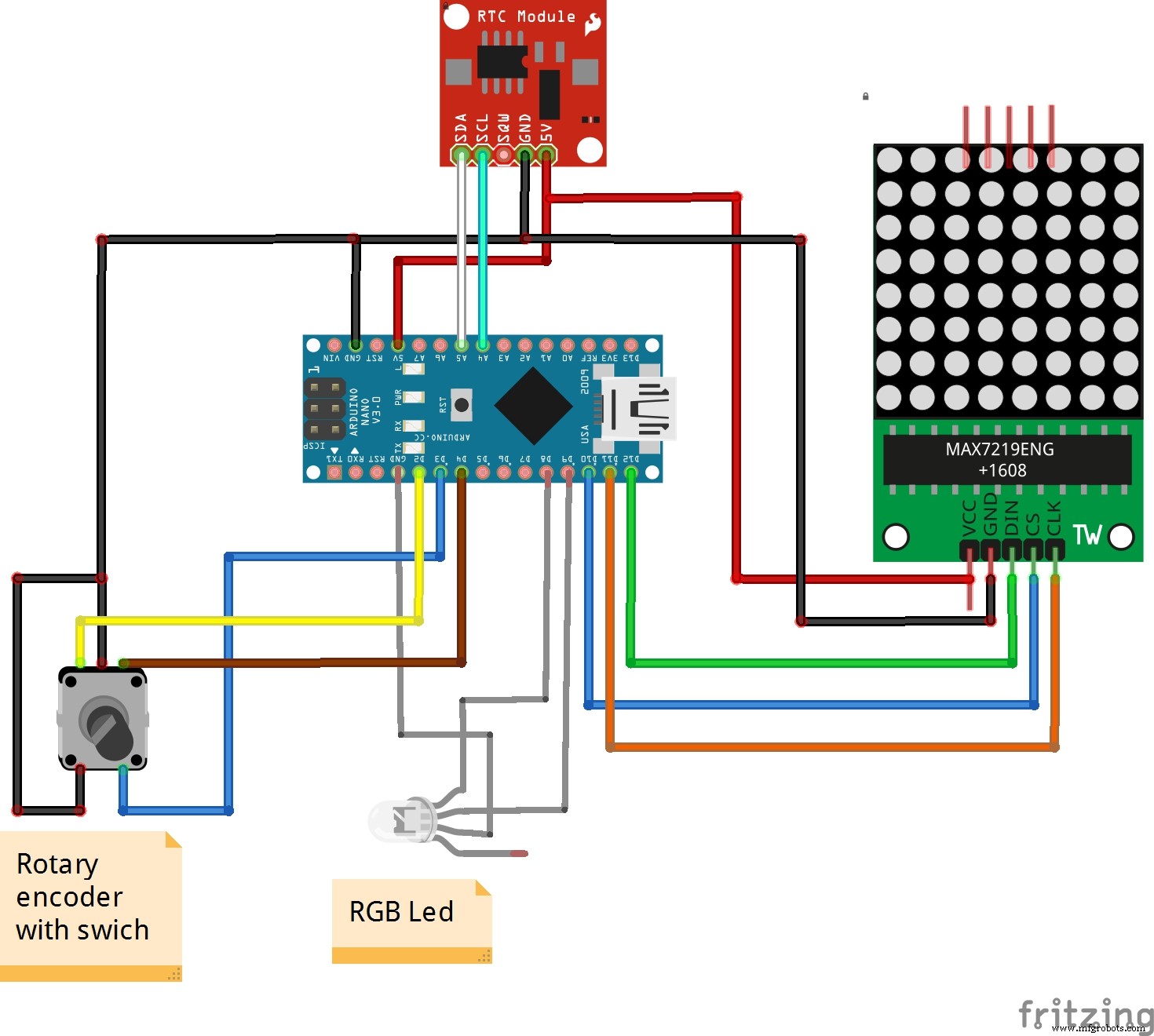
Adrian Jones가 개발한 이 8x8 LED Matrix Module CLOCK을 제작했습니다. 시간은 왼쪽에서 오른쪽으로 스크롤하거나 소프트웨어 제어 하에 위에서 아래로 스크롤하여 표시됩니다. 시간의 각 자릿수는 오른쪽에서 연속적으로 들어가며 중앙에 오면 순간적으로 멈추고 약간 밝아집니다. 그런 다음 디스플레이의 다음 숫자가 보기로 스크롤되는 동안 왼쪽으로 스크롤됩니다. 주기는 연속된 디스플레이 사이에 짧은 지연으로 반복됩니다. "위에서 아래로" 수직 뒤집기의 경우 다음을 변경해야 합니다.
정적 부울 top2bottom =거짓;
받는 사람:
정적 부울 top2bottom =true;
코드 주석에서 볼 수 있듯이 스크롤 속도, 문자 간 빈 줄 수, 12/24시간 표시, 문자 간 ms, 밝기 등과 같은 많은 매개변수를 변경할 수 있습니다.
시간은 로터리 엔코더를 사용하여 쉽게 설정할 수 있습니다. 2색 다이오드가 설정 모드(분, 시간 또는 일반)를 표시합니다. 두 개의 기본 조각으로 구성된 상자에 시계를 넣어 상자 내부에 쉽게 접근할 수 있습니다. 매우 편리하고 실용적입니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
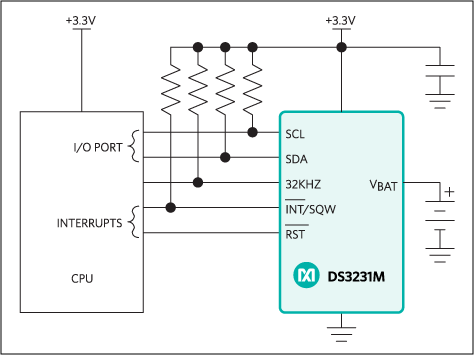
구성품 및 소모품 Arduino Nano R3 × 1 LED 매트릭스 × 1 포토 저항기 × 1 브레드보드(일반) × 1 DS3231 × 1 앱 및 온라인 서비스 Arduino IDE 이 프로젝트 정보 몇 미터 떨어진 방의 시계 디스플레이를 읽으려면 이러한 LED 매트릭스 디스플레이가 필요합니다. 좋은 가격에 4셀 디스플레이를 구입한 후 Hackster에서 사용 가능한 프로젝트를
구성품 및 소모품 Arduino UNO × 1 DHT11 온도 및 습도 센서(4핀) × 1 Adafruit RGB 백라이트 LCD - 16x2 × 1 저항 10k 옴 × 1 파워 뱅크 × 1 SparkFun 푸시버튼 스위치 12mm × 1 USB-A-B 케이블 × 1 점퍼 와이어(일반) × 1 브레드보드(일반) × 1 이 프로젝트 정보