

제조공정

산업 제조
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
| ||||
 |
|
이 튜토리얼은 이 페이지의 리소스를 기반으로 합니다.
LittleArm은 전통적으로 Windows 및 Linux에서 실행되는 무료 데스크톱 컴퓨터 응용 프로그램을 사용하여 제어됩니다. 그러나 이를 위해서는 LittleArm이 제어할 컴퓨터에 연결되어 있어야 합니다. 드디어 블루투스로 무선으로 아두이노를 제어할 수 있도록 LittleArm용 앱을 완성했습니다.
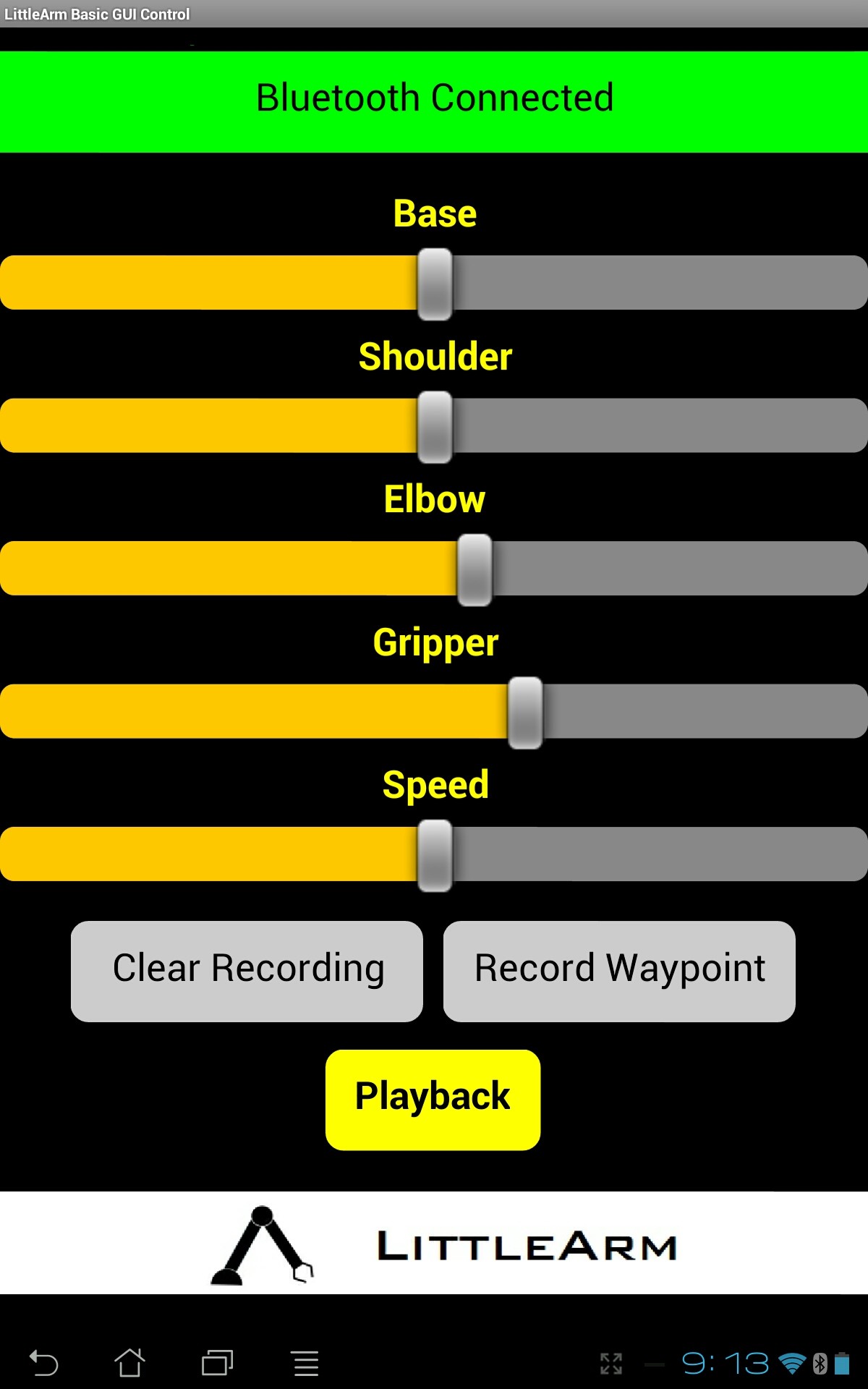
이 앱을 사용하면 LittleArm의 모든 DOF를 제어할 수 있을 뿐만 아니라 일련의 명령을 기록하고 재생할 수도 있습니다. Arduino용 코드는 여기에서 소프트웨어 패키지의 기존 코드에서 변경되지 않습니다.
이 프로젝트의 LittleArm 앱은 여기에서 다운로드할 수 있습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
#include//arduino library#include //standard c library#define PI 3.141Servo baseServo; 서보 숄더서보; 서보 엘보 서보; 서보 그리퍼Servo;int 명령;struct jointAngle{ int base; 인트 숄더; int 엘보;};int desiredGrip;int gripperPos;int desiredDelay;int servoSpeed =15;int 준비 =0;struct jointAngle desiredAngle; //서보의 원하는 각도//+++++++++++++++++FUNCTION DECLARATIONS++++++++++++++++++++++++ +++int ServoParallelControl(int thePos, Servo theServo);//+++++++++++++++++++++++++++++++++++++ ++++++++++++++++++++++++++ 무효 설정(){ Serial.begin(9600); baseServo.attach(9); // 9번 핀의 서보를 서보 객체에 연결합니다. ShoulderServo.attach(10); 엘보우서보.attach(11); 그리퍼서보.attach(6); Serial.setTimeout(50); // arduino가 너무 오랫동안 직렬을 읽지 않도록 합니다. Serial.println("started"); baseServo.write(90); //서보의 초기 위치 ShoulderServo.write(150); 엘보우서보.쓰기(110); ready =0;} //기본 arduino loopvoid loop() { if (Serial.available()){ ready =1; DesiredAngle.base =Serial.parseInt(); 원하는 각도.숄더 =Serial.parseInt(); DesiredAngle.elbow =Serial.parseInt(); 원하는 그립 =Serial.parseInt(); 원하는 지연 =Serial.parseInt(); if(Serial.read() =='\n'){ // 마지막 바이트가 'd'이면 읽기를 중지하고 명령을 실행합니다. 'd'는 '완료'를 나타냅니다. Serial.flush(); //버퍼에 쌓인 다른 모든 명령을 지웁니다. //명령 완료를 보냅니다. Serial.print('d'); } } 정수 상태1 =0; 정수 상태2 =0; 정수 상태3 =0; 정수 상태4 =0; 정수 완료 =0; while(done ==0 &&ready ==1){ //서보를 원하는 위치로 이동 status1 =servoParallelControl(desiredAngle.base, baseServo, desiredDelay); status2 =servoParallelControl(desiredAngle.shoulder, ShoulderServo, desiredDelay); status3 =servoParallelControl(desiredAngle.elbow,elbowServo,desiredDelay); status4 =servoParallelControl(desiredGrip,gripperServo,desiredDelay); if (상태1 ==1 &상태2 ==1 &상태3 ==1 &상태4 ==1){ 완료 =1; } }// 동안의 끝 }//++++++++++++++++++++++++++++++++기능 DEFITNITIONS++++++++ ++++++++++++++++++++++++++++++++++int servoParallelControl(int thePos, Servo theServo, int theSpeed){ int startPos =theServo.read(); //현재 위치 읽기 int newPos =startPos; //intSpeed =속도; // 명령과 관련하여 위치가 어디에 있는지 정의 // 현재 위치가 실제 위로 이동하는 것보다 작은 경우 if (startPos <(thePos-5)){ newPos =newPos + 1; theServo.write(newPos); 지연(theSpeed); 반환 0; } else if (newPos> (thePos + 5)){ newPos =newPos - 1; theServo.write(newPos); 지연(theSpeed); 반환 0; } else { 반환 1; } }
제조공정
이 Arduino IR Tutorial에서는 TV 리모컨과 Arduino를 사용하여 전자 장치를 제어하는 방법을 배웁니다. 간단한 LED 제어부터 DC Fan 속도 제어, 고전압 가전 제어까지 몇 가지 예를 들어 보겠습니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 작동 방식 버튼을 눌렀을 때 TV 리모컨 앞의 LED가 깜박이는 것을 볼 수 있습니다. 실제로 이것은 적외선이며 사람의 눈에는 보이지 않기 때문에 카메라를 통해서만 볼 수 있습니다. 따라서 깜박임은 버튼을 누를 때 적외선 LED가 적
이 튜토리얼에서는 이전 비디오 중 하나에서 제작한 DIY 3D Printed SCARA 로봇 팔을 레이저 조각기로 변환하는 방법을 보여 드리겠습니다. 동영상 다음 동영상을 보거나 아래 기사를 읽을 수 있습니다. 프로젝트 개요 SCARA 로봇은 4개의 NEMA 17 스테퍼 모터로 구동되고 Arduino 보드를 사용하여 제어되는 4개의 자유도를 가지고 있습니다. 원본 비디오에서는 Arduino UNO 보드를 CNC Shield와 조합하여 사용했지만 이제는 Arduino MEGA 보드와 RAMP 보드를 함께 사용합니다. 로봇을 제어하