

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
 |
|
이 로봇 - Mofiza-(이상한 이름)는 주변 환경을 보고, 말하고, 반응할 수 있습니다. 계속하기 전에 동영상을 시청하세요:
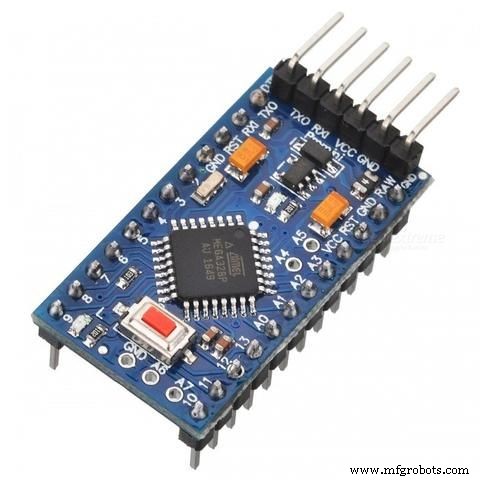
말하는 로봇을 만드는 것을 본 이후로 사람들이 실제로 Arduino가 아닌 다른 개발 보드를 사용하여 말하는 로봇을 만드는 것을 보았습니다. 그러나 말을 할 수 있고 움직일 수 있도록 많은 서보를 추가할 수 있는 휴머노이드 로봇을 Arduino로 만드는 것은 완전히 가능합니다. 그럼 시작하겠습니다:
업데이트(내가 만든 방법) -
1단계:필요한 부품

 <울>
<울>
2단계:IR 센서와 본체 연결

당신이 원하는 무엇이든 몸을 만드십시오, 나는 판지로 그것을 만들었습니다. 아주 간단합니다.
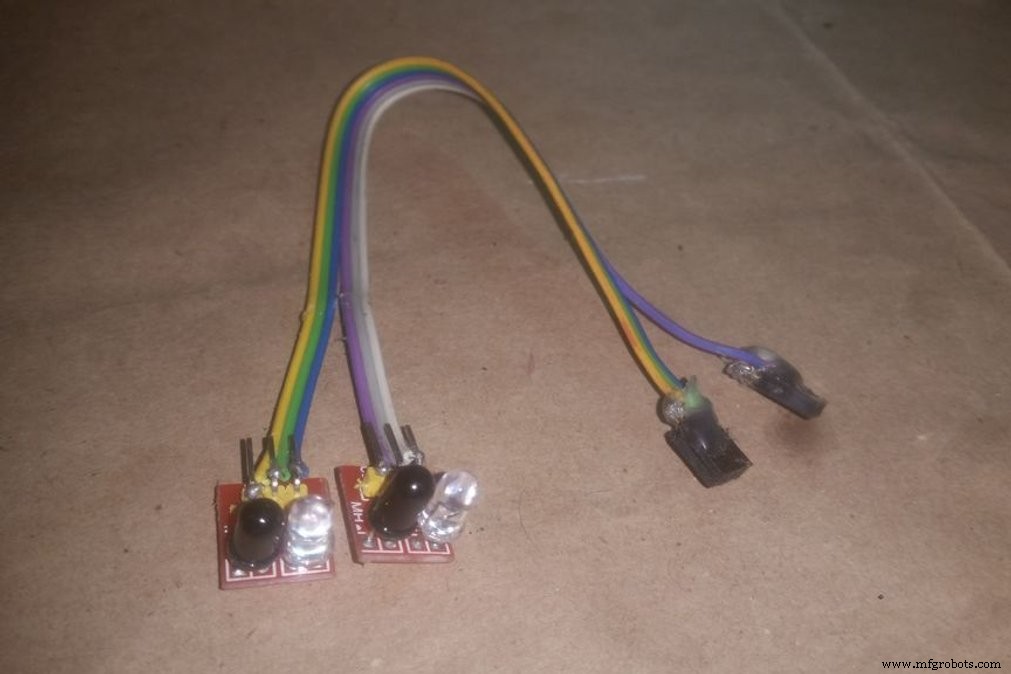
한쪽 끝에 암 헤더가 있는 리본 케이블로 IR 센서를 납땜하고 두 눈에 두 개, 가슴에 한 개를 추가했습니다.
로봇은 가슴 센서에서 무언가를 감지하면 환영 메시지를 말하고 눈 센서가 높으면 "아아아.. 내 눈을 만지지 마십시오"라고 말합니다. 거기에 있는 서보가 위로 이동합니다.
3단계:서킷
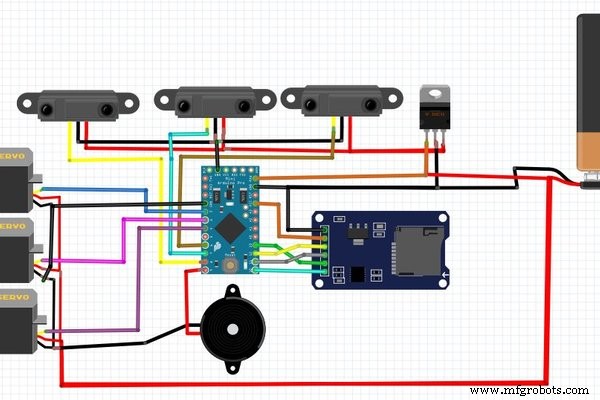
회로는 약간 복잡해 보이지만 전혀 간단하지 않습니다. 하나의 배터리로 전원을 켤 수 있습니다. 회로와 다른 모든 구성 요소를 베로 보드에 납땜하고 머리와 손에 다른 서보를 추가합니다.
4단계:코드
코드 앞:
이 로봇에는 두 개의 라이브러리를 사용해야 했습니다.
TMRpcm.h - SD 카드 토크에서 오디오 재생용 https://github.com/TMRh20/TMRpcm
ServoTimer2.h - TMRpcm이 arduino에서 Timer1을 사용하므로 TMRpcm과의 충돌을 피하고 timer2를 사용하여 서보 모터를 실행합니다. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
환영한다는 코드입니다. 자신만의 환경과 코드를 만들 수 있습니다. 코드를 작성하기 전에 ServoTimer2 라이브러리를 추가해야 합니다. 로봇도 실행되지 않습니다.
그런 다음 코드:
#include "ServoTimer2.h#include#define SD_ChipSelectPin 10#include"TMRpcm.h#includeTMRpcm tmrpcm;ServoTimer2 matha;ServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8; 무효 설정() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD 실패"); 반품; }} 무효 루프() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); 지연(2000); lhand.write(1200); //핸드셰이크 위치 지연(9000); } else { lhand.write(300); rhand.write(1700); Matha.write(1500); }}
5단계:완료
이제 전원을 켜기만 하면 됩니다. 스마트 로봇이 만들어집니다. [곧 다른 사진과 세부 정보를 업로드하겠습니다]
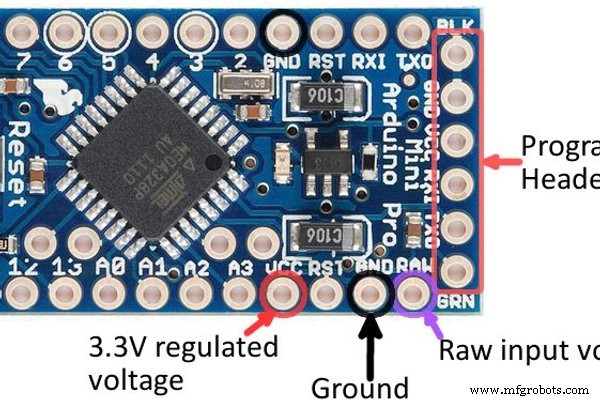
더 많은 핀을 얻을 수 있다면 로봇을 걷게 할 것입니다. 하지만 핀이 3개만 남아 있었습니다(디지털). 필요한 것보다 적습니다.
내 YouTube 채널을 구독하여 지원해 주세요.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
#include "ServoTimer2.h#include#define SD_ChipSelectPin 10#include"TMRpcm.h#includeTMRpcm tmrpcm;ServoTimer2 matha; //matha는 HEADServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD 실패"); 반품; }} 무효 루프() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); 지연(2000); lhand.write(1200); //핸드셰이크 위치 지연(9000); } else { lhand.write(300); rhand.write(1700); Matha.write(1500); }} 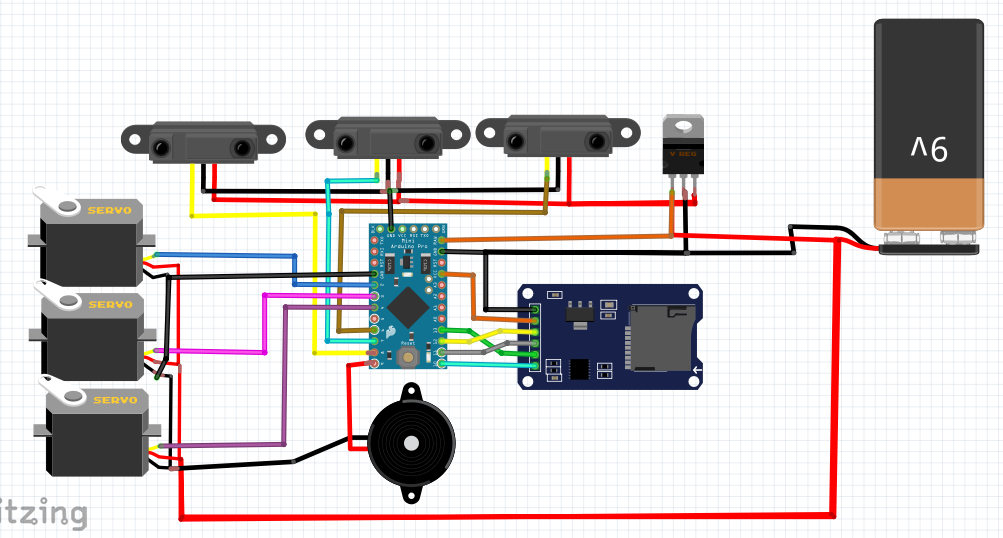
제조공정
이 튜토리얼에서는 어떤 방향으로든 움직일 수 있는 Arduino Mecanum Wheels 로봇을 만드는 방법을 배울 것입니다. 로봇의 이러한 독특한 이동성은 메카넘 휠(Mecanum Wheels)이라는 특수한 유형의 바퀴를 사용하여 이루어집니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 저는 실제로 이 휠을 디자인하고 3D로 인쇄했습니다. 구매 비용이 조금 비쌀 수 있기 때문입니다. 그것들은 아주 잘 작동하고 나는 이 로봇 플랫폼을 운전하는 것이 매우 재미있다고 말해야 합니다. NRF24L01
이 튜토리얼에서는 Arduino hexapod를 구축하는 방법을 보여줍니다. 이름에서 알 수 있듯이 헥사포드에는 6개의 다리가 있지만 그 외에도 꼬리 또는 복부, 머리, 안테나, 하악 및 기능적인 눈도 있습니다. 이 모든 것이 헥사포드를 개미처럼 보이게 하므로 Arduino Ant Robot이라고도 부를 수 있습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 로봇을 제어하기 위해 맞춤형 Android 애플리케이션을 만들었습니다. 앱에는 4개의 버튼이 있어 로봇에게 전진 또는 후진, 좌회전 또는 우