

제조공정

산업 제조
 |
| × | 1 | |||
| |
| × | 2 |
안녕하세요.
오늘 우리는 조이스틱 모듈로 2축 FPV 카메라 크래들을 제어하는 방법에 대한 전체 튜토리얼을 볼 것입니다. 카메라 크래들은 아크릴 지지대와 부품, 나사 및 서보 모터 2개가 포함된 작은 패키지로 제공됩니다.
요구 사항:계속 진행하기 전에 조이스틱이나 서보 모터에 익숙하지 않은 경우 다음 두 가지 자습서가 있습니다.
<울>그래서 여기에서 우리는 서보를 제어하기 위해 두 가지 방법을 사용할 것입니다. 첫 번째 방법은 서보가 조이스틱의 위치를 따르고 우리가 스틱을 움직이는 동안 움직이고, 두 번째 방법은 서보가 조이스틱이 가리키는 방향으로 움직이기 시작하고, 스틱을 다시 움직이거나 방향을 바꿀 때까지 그 자리에 머물러 있습니다.
이것은 우리가 마지막에 갖게 될 것의 데모입니다:
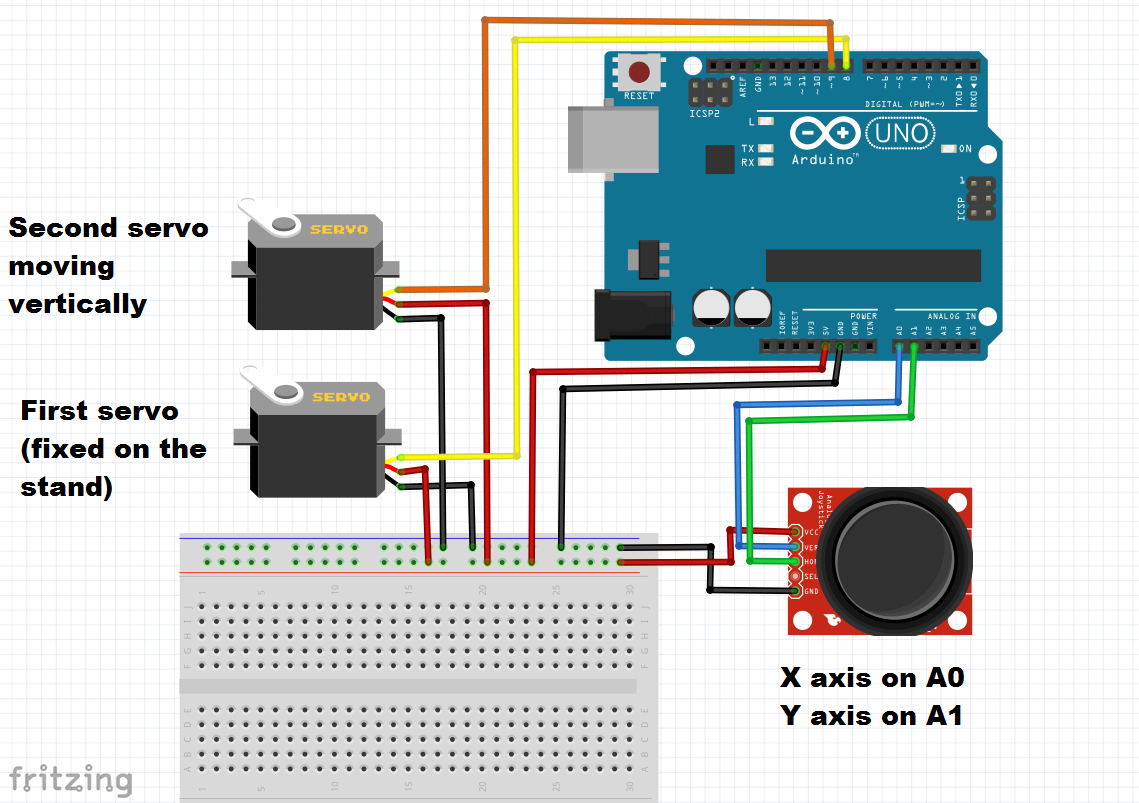
튜토리얼 비디오에서는 코딩하는 동안 단계별로 배선 또는 보정하는 동안 단계별로 진행했지만 여기에서는 모듈이나 서보가 다른 모듈이나 서보에 영향을 미치지 않기 때문에 문제가되지 않는 전체 배선을 제공합니다.
조이스틱 축으로 혼동하지 않기 위해 내 조이스틱은 그림에서 여기(상단에 X축, Y축)가 있으며 거꾸로 되어 있고 다른 이름으로 지정되어 있지만 내가 사용한 배선은 원하는 대로 변경할 수 있습니다(서보 핀, 조이스틱 입력, 방향 ...)
비디오에서 실제로 많은 코드를 사용했기 때문에 혼동을 주지는 않지만 매우 기본적입니다(서보 위치 지정, 조이스틱에서 아날로그 값 읽기...). 다른 자습서를 확인하기 전에 이 작업을 수행했으므로 여기에서 영상에서 본 것처럼 최종 버전 2개에 대한 코드 2개만 업로드했습니다.
이와 관련하여 필요한 것이 있으면 저에게 연락할 수 있습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
//이 코드는 두 개의 서보를 사용하는 이중 축 fpv 카메라 크래들과 함께 사용하고 조이스틱 모듈을 추가합니다//아날로그 스틱을 움직여 크래들의 위치를 제어하고 크래들은 조이스틱 움직임을 따릅니다//참조 자세한 정보는 surtrtech.com 참조#include//서보 라이브러리 및 선언Servo myservo1;Servo myservo2;int YAxis =1; //조이스틱 핀의 X축과 Y축이 연결된 위치 선언int XAxis =0; //물론 아날로그 입력 무효 setup() { Serial.begin(9600); // 직렬 모니터 전송 속도 설정 및 실행 pinMode(XAxis, INPUT); //핀 모드 및 서보 핀 선언 myservo1.attach(8); 핀모드(Y축, 입력); myservo2.attach(9);} 무효 루프() { int X=analogRead(XAxis); //X축 전위차계에서 읽기 X=X*0.1756; // 전위차계의 범위를 서보의 0-1023에서 0-180으로 변환하면 360° 서보가 있는 경우 변경할 수 있습니다. 서보 X=180-X;// 그렇지 않으면 서보가 정확한 위치로 회전하도록 사용됩니다. 반전될 것입니다 myservo1.write(X); //적응한 후 첫 번째 서보에 그 값을 주입합니다. int Y=analogRead(YAxis);//Y축 전위차계에서 읽기 Y=Y*0.1466; //여기서 우리는 서보 제한에 맞는 변환을 수행하여 0-1023에서 0-150으로 이동했습니다. myservo2.write(Y);//서보에 주입}
//이 코드는 두 개의 서보를 사용하는 이중 축 fpv 카메라 크래들과 함께 사용하고 조이스틱 모듈을 추가합니다.//아날로그 스틱을 움직여 크래들의 위치를 제어합니다. 크래들은 스틱이 있는 방향으로 이동합니다. 가리키고//한계까지 그리고 거기에 머물기//자세한 내용은 surtrtech.com 참조#include//서보 라이브러리 및 선언Servo myservo1;Servo myservo2;int a,b,X,Y; //필요한 변수 laterint YAxis =1; //조이스틱 핀의 X축과 Y축이 연결된 위치 선언int XAxis =0; //물론 아날로그 입력 무효 setup() { Serial.begin(9600); // 직렬 모니터 전송 속도 설정 및 실행 pinMode(XAxis, INPUT); //핀 모드 및 서보 핀 선언 myservo1.attach(8); 핀모드(Y축, 입력); myservo2.attach(9);} 무효 루프() { a=myservo1.read(); //이전 서보 위치를 읽는 것은 다음 위치에 있어야 할 위치를 알 수 있도록 중요한 단계입니다. b=myservo2.read(); X=analogRead(XAxis);//조이스틱 값 읽기 Y=analogRead(YAxis); if(X>550){ //조이스틱이 3개의 위치를 갖도록 보정을 하지 않았습니다. (Left|Resting|Right) a=a-1; //그것은 우리가 읽는 값에 따라 달라집니다 우리는 스틱이 가리키는 방향을 알 수 있습니다. 그리고 나는 휴식 위치를 크게 남겨두었습니다. 실제로는 1 값에 불과합니다. myservo1.write(a); //새로운 값을 주입합니다. delay(50); //지연을 크거나 짧게 만들거나 a=a-x에 대해 동작하여 큰 단계 또는 짧은 단계를 만들 수 있습니다. } if(X<450){ a=a+1; //여기서 반대 방향으로 이동하기 위해 반대 연산을 했습니다. myservo1.write(a); 지연(50); } if(Y>600){ //여기서는 조이스틱이 세 가지 위치(Up|Resting|Down)를 갖도록 보정을 수행하지 않았습니다. ditto b=b+1; myservo2.write(b); 지연(50); } if(Y<450){ b=b-1; myservo2.write(b); 지연(50); }
제조공정
이 Arduino IR Tutorial에서는 TV 리모컨과 Arduino를 사용하여 전자 장치를 제어하는 방법을 배웁니다. 간단한 LED 제어부터 DC Fan 속도 제어, 고전압 가전 제어까지 몇 가지 예를 들어 보겠습니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 작동 방식 버튼을 눌렀을 때 TV 리모컨 앞의 LED가 깜박이는 것을 볼 수 있습니다. 실제로 이것은 적외선이며 사람의 눈에는 보이지 않기 때문에 카메라를 통해서만 볼 수 있습니다. 따라서 깜박임은 버튼을 누를 때 적외선 LED가 적
서보 건은 아마도 몇 년 동안 로봇 스폿 용접에서 일어날 수 있는 최고의 일 중 하나일 것입니다. 이 스폿 용접 건은 용접 품질, 생산성, 용접 제어를 개선하고 장비 비용도 절감합니다. 제조업체가 무엇을 더 요구할 수 있습니까? 이 서보 건은 로봇과 동기화할 수 있으므로 사이클 시간이 짧아져 스폿 용접 애플리케이션의 생산성이 높아집니다. 또한 서보 모터로 구동되므로 프로그래밍된 서보 건이 기존 건보다 3배 더 빠른 속도로 작동할 수 있습니다. 생산성 향상과 함께 로봇 용접 서보 건은 제조업체 제품의 용접 품질도 향상시킵니다.