

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
 |
|
아두이노와 함께하는 레비테이터.
몸을 3D로 인쇄할 수 있습니다.
https://www.thingiverse.com/thing:1392023
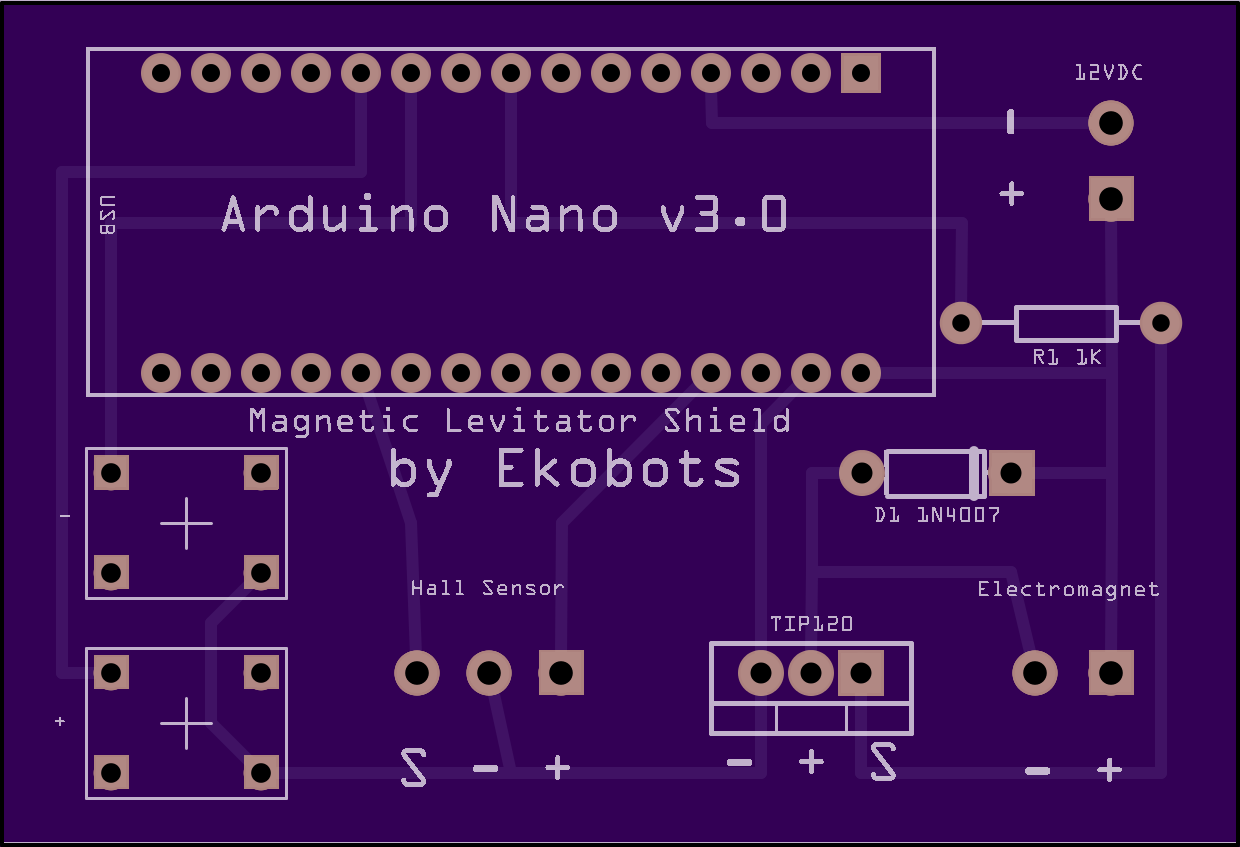
<울>프로토보드를 사용하거나 보드를 만들 수 있습니다(Arduino Nano).
http://www.thingiverse.com/thing:1392530
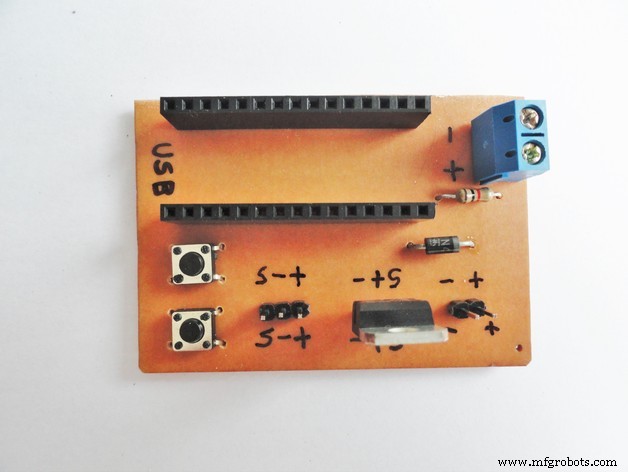
아니면 하나만 구매하세요:
https://oshpark.com/shared_projects/kxH3Ak1b
주의:
<울>
자세한 내용과 팁은 Thingiverse에서 내 제품을 참조하세요.
레비테이터 3D 프린팅:
https://www.thingiverse.com/make:201394
Arduino Nano용 쉴드:
https://www.thingiverse.com/make:201420
쉽습니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
구성품 및 소모품 Arduino UNO × 1 Microchip Technology ATtiny85 × 1 전해 디커플링 커패시터 - 10uF/25V × 1 점퍼 와이어 M/M × 1 이 프로젝트 정보 저는 다른 위치에서 여러 센서 데이터를 읽어야 하는 프로젝트를 진행 중입니다. 여기에는 몇 개의 PWM 핀만 필요하므로 여러 Arduino Uno를 사용하는 것은 비용이 많이 들고 불필요합니다. 그래서 Arduino Uno 개발 보드 대신 A
이 튜토리얼에서는 Arduino와 릴레이 모듈을 사용하여 고전압 장치를 제어하는 방법을 배웁니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 릴레이를 사용하여 고전압 전자 장치를 제어할 수 있습니다. 릴레이는 실제로 전자석에 의해 전기적으로 작동되는 스위치입니다. 전자석은 예를 들어 마이크로컨트롤러의 5볼트와 같은 저전압으로 활성화되고 접점을 당겨 고전압 회로를 만들거나 끊습니다. HL-52S 릴레이 모듈 이 Arduino 릴레이 튜토리얼의 예로서 10A @ 250 및 125 V AC 및 1